Область техники, к которой относится изобретение
Настоящее изобретение относится к проверкеустройств, позволяющих определять местоположение с использованием вспомогательных данных. В частности настоящее изобретение относится к имитатору объекта определения местоположения, применяемому при проверке устройств, позволяющих определять местоположение с использованием вспомогательных данных.
Уровень техники
В последнее время значительно повысился интерес к определению местоположения мобильных устройств. Особый интерес, при этом, проявляется в области обеспечения возможности определения местоположения абонентов сотовой телефонной сети в определенных обстоятельствах. Например, Федеральная комиссия связи (ФКС, FCC) США издала распоряжение, в соответствии с которым местоположение пользователя телефона сотовой связи должно определяться автоматически, когда пользователь набирает номер 911. Кроме этого распоряжения FCC, предполагается, что будут разработаны другие приложения, в которых может использоваться информация о местоположении пользователей.
В настоящее время применяют различные технологии определения местоположения мобильного модуля. Например, получила распространение Глобальная система позиционирования (ГСП, GPS), которая представляет собой спутниковую систему, обеспечивающую для пользователей возможность, с помощью приемника GPS определять свое местоположение в любом месте мира. Приемник GPS обычно определяет свое местоположение путем измерения относительного времени поступления сигналов, переданных одновременно от множества спутников GPS.
Каждый спутник GPS передает сверхвысокочастотный сигнал несущей, который "расширен" с использованием повторяющегося кода, построенного на основе псевдослучайной шумовой (ПСШ, PRN) последовательности. Код ПСШ каждого спутника является уникальным для этого спутника, и все коды ПСШ повторяются и имеют одинаковую продолжительность. Кроме того, расширение сигнала несущей, используемое всеми спутниками GPS синхронизировано так, что оно начинается в одно время, соответствующее времени GPS. Сверхвысокочастотный сигнал несущей также промодулирован сигналом с частотой 50 Гц, который содержит данные, описывающие орбиты спутников, коррекцию часов и другие системные параметры. Данные позиционирования спутника GPS, а также данные синхронизации часов, обычно называют "эфемеридными" данными.
Как правило, приемник GPS позволяет воспроизводить, или сохранять в памяти, копии кодов ПСШ, используемых спутниками GPS. Приемник сдвигает копию ПСШ по времени до тех пор, пока не будет получена корреляция с кодом ПСШ, переданным спутником и принятым приемником GPS. Смещение по времени, соответствующее обеспечению корреляции, представляет собой параметр времени поступления сигнала (ВПС, TOA) ПСШ спутника в приемник. ВПС пропорционально расстоянию между спутником и приемником, со смещением, равным разнице между часами приемника и временем GPS. ВПС обычно называют псевдодальностью. Для обеспечения возможности получения решения по местоположению приемника приемник GPS измеряет псевдодальность до множества спутников (обычно четырех), для получения решения местоположения по координатам x, y и z и для коррекции ошибок синхронизации между часами приемника и временем GPS. В дополнение к измерениям псевдодальности приемник демодулирует эфемеридные данные, что позволяет провести оценку местоположения спутников, когда будет выполнено измерение псевдодальности. На основе известного местоположения спутников и относительного расстояния до каждого спутника можно выполнить оценку местоположения приемника с использованием процесса трехстороннего измерения.
Процесс поиска и захвата сигналов GPS, считывания эфемеридных данных для множества спутников и оценки местоположения приемника на основании этих данных требует времени и часто занимает несколько минут. Во многих случаях такое длительное время обработки является недопустимым и, кроме того, это существенно ограничивает срок службы батарей в случае микроминиатюрных портативных вариантов применения.
Для уменьшения времени, требуемого для получения данных GPS, используемых для оценки местоположения, были предприняты несколько попыток применения различных технологий. Одна такая технология, которая была разработана в промышленности радиосвязи, определена стандартом TIA/EIA IS-801-1 под названием "Position Determination Service Standards for Dual Mode Spread Spectrum Systems", который приведен здесь полностью в качестве ссылки. Стандарт IS-801-1 содержит определения для сообщений, которые передают между мобильным модулем и инфраструктурой сети, такой как сеть сотовой связи, для уменьшения времени, необходимого для получения данных GPS. Мобильный модуль может включать, например, телефон сотовой связи с функцией GPS. Инфраструктура сети может включать Объект определения местоположения (ООМ, PDE), который помогает мобильному модулю получать данные GPS. Например, когда требуется определить местоположение мобильного модуля, ООМ может передавать вспомогательные данные в удаленный блок для упрощения захвата мобильным модулем данных GPS. Такие вспомогательные данные могут включать, например, код ПСШ спутников GPS, которые, наиболее вероятно, находятся в поле зрения мобильного модуля, доплеровскую информацию, включая размер окна поиска доплеровского смещения, и окно поиска фазы кода ПСШ.
Другая хорошо известная технология определения местоположения представляет собой технологию усовершенствованного трехстороннего измерения прямой линии связи (УТПЛ, AFLT). Технология AFLT основана на измерении разности времени поступления сигналов наземной базовой станции. В случае сети радиосвязи CDMA (МДКР, множественный доступ с кодовым разделением каналов), эти измерения называют измерениями фазы пилот-сигнала. Всякий раз, когда мобильное устройство способно обнаружить сигналы от трех базовых станций с различным местоположением, одна из которых, вероятно, используется в качестве обслуживающей базовой станции, может быть определено положение мобильного устройства.
Бывают случаи, когда в определенных местах мобильное устройство не может детектировать сигналы, по меньшей мере, четырех спутников GPS, ни детектировать сигналы, по меньшей мере, трех базовых станций. В этом случае, ни технология GPS, ни технология AFLT по отдельности не дают возможность получить решение местоположения. Третья технология, которую обычно называют "Гибридной", позволяет комбинировать измерения GPS и AFLT. Гибридная технология позволяет получать решение местоположения даже в случае, когда доступное количество спутников меньше требуемого. Когда мобильное устройство связывается с сотовой сетью, синхронной с GPS, такой, как сеть, соответствующая стандартам IS-95 или IS-2000, относящимся к сети МДКР, Гибридная технология обладает дополнительным преимуществом, которое состоит в том, что дополнительно уменьшается требуемое минимальное количество измерений. Как технология AFLT, так и Гибридная технология поддерживаются стандартом IS-801-1, который определяет используемые вспомогательные сообщения, передаваемые ООМ в мобильное устройство.
В настоящее время различные производители разработали ООМ, которые соответствуют стандарту IS-801-1. Однако, даже если два ООМ различных производителей соответствуют стандарту IS-801-1, вспомогательные данные, передаваемые этими двумя ООМ, могут быть различными. Различия вспомогательных данных, передаваемых в мобильный модуль, могут повлиять на рабочие характеристики мобильного модуля при получении данных GPS. Например, для мобильного модуля может потребоваться больше времени для захвата данных GPS при использовании вспомогательных данных, предоставляемых ООМ одного производителя, чем при использовании ООМ другого производителя. Большая часть мобильных модулей, однако, оптимизирована для работы с ООМ определенных производителей. Опубликованные спецификации рабочих характеристик мобильного модуля могут относиться к работе с ООМ, для которых мобильный модуль был оптимизирован.
Изменения рабочих характеристик ООМ могут затруднить проверку и сравнение рабочих характеристик различных мобильных модулей. Например, если один производитель производит как ООМ, так и мобильные модули, эти ООМ и мобильные модули могут обеспечить удовлетворительный уровень характеристик при совместной работе. Однако тот же ООМ или мобильный модуль могут не обеспечивать удовлетворительные рабочие характеристики при работе с мобильным модулем или ООМ производства другого производителя. Ожидается появление множества различных производителей ООМ и мобильных модулей, и при этом вариации рабочих характеристик при взаимодействии различных комбинаций ООМ и мобильных модулей могут снизить общую эффективность работы системы при оценке местоположения удаленного блока. Это может привести к серьезным последствиям, в частности, в неотложных ситуациях или в ситуациях, когда вызывают службу 911.
С учетом этих и других проблем, существует потребность в разработке стандартной технологии и устройства, которые позволили бы упростить проверку рабочих характеристик мобильного модуля при захвате данных GPS для оценки местоположения мобильного модуля.
Сущность изобретения
Предложены способ и устройство для проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных. Один из аспектов состоит в использовании имитатора объекта определения местоположения (ООМ), который связан с имитатором базовой станции. Имитатор базовой станции имитирует одну или несколько базовых станций. Описанный способ заключается в том, что подключают проверяемое устройство, позволяющее определять местоположение с использованием вспомогательных данных, к имитатору базовой станции, имитатору глобальной системы позиционирования (GPS) и инициируют проверочную последовательность, в которой проверяемое устройство принимает набор заранее определенных сигналов GPS. В заданный момент времени проверяемое устройство (ПРУ, DUT) запрашивает вспомогательные данные от имитатора базовой станции, и имитатор базовой станции запрашивает вспомогательные данные от имитатора ООМ, причем имитатор ООМ передает данные, независимые от данных имитатора GPS в базовую станцию, и базовая станция передает данные ООМ в ПРУ. Данные ООМ могут представлять собой набор заранее определенных ответов на любой из множества запросов.
Другой аспект способа проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, заключается в том, что (1) используют имитатор объекта определения местоположения (ООМ), который связан с имитатором базовой станции, имитирующим одну или несколько базовых станций, (2) подключают проверяемое устройство, позволяющее определять местоположения с использованием вспомогательных данных, к имитатору базовой станции и к имитатору системы глобального позиционирования (GPS) и (3) инициируют проверочную последовательность. В ходе этой проверочной последовательности имитатор ООМ передает вспомогательные данные и выполняет запрос в проверяемое устройство на проведение измерений псевдодальности или измерений фазы пилот-сигнала или обоих этих измерений, и при этом проверяемое устройство принимает вспомогательные данные и запрос и, используя вспомогательные данные, проводит измерение псевдодальности или измерение фазы пилот-сигнала, или оба этих измерения и передает результаты измерения псевдодальности в имитатор базовой станции. Данные ООМ могут представлять собой набор заранее определенных ответов, индексированных по прошедшему времени проверки.
Другой аспект проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, в соответствии с настоящим изобретением, заключается в том, что используют имитатор объекта определения местоположения (ООМ), который связан с имитатором базовой станции, имитирующим один или несколько сигналов базовой станции, и подключают проверяемое устройство, позволяющее определять местоположение с использованием вспомогательных данных, к имитатору базовой станции и к имитатору глобальной системы позиционирования (GPS), и инициируют проверочную последовательность. В проверочной последовательности имитатор ООМ передает вспомогательные данные захвата и выполняет запрос в проверяемое устройство на определение местоположения, и проверяемое устройство принимает вспомогательные данные и запрос и, используя вспомогательные данные, проводит измерение местоположения и передает результаты измерения местоположения в имитатор базовой станции. Данные ООМ могут представлять собой набор заранее определенных ответов, индексированных по прошедшему времени проверки.
Имитатор объекта определения местоположения (ООМ), построенный в соответствии с настоящим изобретением, содержит контроллер, сконфигурированный с возможностью приема запросов на получение вспомогательных данных и вывода ответов, содержащих вспомогательные данные, и работающий с базой данных, заполненной заранее определенными ответами, содержащими вспомогательные данные, соответствующими набору запросов на получение вспомогательных данных. Соответствующий ответ выбирают из базы данных в соответствии с принятым типом запроса на получение вспомогательных данных и прошедшим временем проверки. Ответы, содержащие вспомогательные данные, могут соответствовать данным GPS или AFLT.
Краткое описание чертежей
На фигуре 1 показана блок-схема, иллюстрирующая обычно используемую компоновку для проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных.
На фигуре 2 показана блок-схема, иллюстрирующая улучшенную компоновку для проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, построенную в соответствии с настоящим изобретением.
На фигуре 3 показана блок-схема компоновки для проверки, подробно представляющая улучшенную компоновку, построенную в соответствии с настоящим изобретением.
На фигурах 4A и 4B изображена таблица, представляющая различные запросы мобильной станции (МС, MS) и соответствующий ответ имитатора PDE для системы по фиг. 2.
На фигуре 5 показана схема потока вызовов для проверки, где имитатор ООМ по фигуре 2 инициирует проверку по измерению псевдодальности.
На фигуре 6 показана схема потока вызовов для проверки, где имитатор ООМ по фигуре 2 инициирует проверку по определению местоположения.
На фигуре 7 показана таблица, в которой представлены сценарии проверки системы по фигуре 2 для мобильной станции без возможности расчета местоположения.
На фигуре 8 показана таблица, в которой представлены сценарии проверки системы по фигуре 2 для мобильной станции, обладающей возможностью расчета местоположения.
Подробное описание изобретения
На фигуре 1 показана блок-схема, иллюстрирующая обычную компоновку проверяемых устройств, позволяющих определять местоположение с использованием вспомогательных данных, которые предназначены для работы в сети связи. Как показано на фигуре 1, проверяемое устройство 10, позволяющее определять местоположение с использованием вспомогательных данных, соединено с имитатором 12 базовой станции, который может имитировать одну или больше базовых станций, и имитатором 14 GPS через смеситель 16. Имитатор 12 базовой станции также соединен с эмулятором 18 ООМ. Эмулятор 18 ООМ также принимает сигналы имитатора 14 GPS. Для поддержания принципов работы эмулятора, эмулятор 18 ООМ имитирует работу рабочего ООМ, формируя его входные и выходные сигналы. При этом эмулятор ООМ (а также имитатор базовой станции) может содержать полностью рабочие устройства.
В ходе типичной проверочной последовательности проверяемое устройство 10 выполняет запрос на получение вспомогательных данных от имитатора 12 базовой станции. Имитатор 12 базовой станции принимает запрос на получение вспомогательных данных от испытуемого устройства 10 и передает запрос на получение вспомогательных данных в эмулятор 18 ООМ. Эмулятор 18 ООМ, принимающий те же сигналы GPS от имитатора 14 GPS, что и проверяемое устройство 10, сконфигурирован для предоставления вспомогательных данных, используемых проверяемым устройством 10.
Эмулятор 18 ООМ передает вспомогательные данные в имитатор 12 базовой станции, где их форматируют и передают в проверяемое устройство 10. Проверяемое устройство, принимающее GPS сигналы от имитатора 14 GPS, использует вспомогательные данные и захватывает данные псевдодальности из сигнала GPS. Проверяемое устройство 10 затем передает данные псевдодальности в имитатор 12 базовой станции. Один из способов оценки рабочих характеристик проверяемого устройства 10 при определении им местоположения состоит в определении точности измерений псевдодальности и продолжительности времени, затрачиваемого испытуемым устройством 10 для получения данных и выполнения измерения.
На фигуре 2 показана блок-схема, иллюстрирующая улучшенную компоновку, построенную в соответствии с настоящим изобретением, для проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных. Как показано на фигуре 2, проверяемое устройство 10, позволяющее определять местоположение с использованием вспомогательных данных, связано с имитатором 12 базовой станции, который может имитировать одну или несколько базовых станций, и имитатором 14 GPS через смеситель 16. Имитатор 12 базовой станции также связан с имитатором 20 ООМ, построенным в соответствии с настоящим изобретением. Имитатор 20 ООМ не связан с имитатором 14 GPS, за исключением возможности приема от него сигнала синхронизации, например сигнала 1 PPS (импульс в секунду). Когда имитатор 12 базовой станции и имитатор 14 GPS синхронизированы по времени, используют сигнал синхронизации, поступающий от имитатора базовой станции, а не от имитатора GPS. Поскольку требования к точности синхронизации для имитатора 20 ООМ являются не строгими, сигнал синхронизации может быть вообще исключен, и вместо него могут использоваться внутренние часы имитатора ООМ.
В обычной проверочной последовательности, как имитатор 14 GPS, так и имитатор 20 ООМ начинают работу приблизительно одновременно. Когда используют внутренние часы имитатора ООМ, вместо получения системного времени от другого испытательного оборудования, как описано выше, часы имитатора ООМ должны включаться от внешнего сигнала приблизительно в момент включения устройства. В ходе проверки, когда проверяемое устройство 10 выполняет запрос на получение вспомогательных данных от имитатора 12 базовой станции, имитатор 12 базовой станции принимает запрос на получение вспомогательных данных от проверяемого устройства 10 и передает запрос на получение вспомогательных данных в имитатор 20 ООМ. Имитатор ООМ использует данный запрос и время, прошедшее с начала проверки, для формирования ответа. Как более подробно поясняется ниже, имитатор 20 ООМ содержит базу данных, которая содержит поля, соответствующие заранее определенному ответу на различные запросы, которые могут быть выполнены проверяемым устройством 10. Время, прошедшее с начала проверки и тип запроса, полученного от проверяемого устройства 10, используют для выбора соответствующего ответа имитатора ООМ. Ответ имитатора 20 ООМ может быть заранее определенным, поскольку выходной сигнал имитатора GPS начинается в известное системное время GPS в начале каждой проверочной последовательности, благодаря чему определяются местоположения спутника GPS для проверочной последовательности. Поскольку имитатор 14 GPS и имитатор 20 ООМ начинают работу приблизительно в один момент системного времени GPS, приблизительно известен выходной сигнал имитатора GPS в любой момент времени после начала проверки, и соответствующий ответ ООМ может быть заранее определен. Затем, во время проверки, имитатор 20 ООМ использует время, прошедшее с начала проверки, для выбора ответа ООМ, соответствующего времени, прошедшему с начала проверки, и типу запроса, выполненному проверяемым устройством.
Как более подробно описано ниже, может быть предпочтительно выполнять скачок системного времени и изменять опорное положение или другие опорные данные между измерениями при выполнении процесса проверки. Поскольку эмулятор ООМ (18 на фигуре 1) должен получать все опорные данные от наблюдаемого сигнала имитатора GPS (14 на фигуре 1), например, путем использования приемника GPS, это может оказаться непрактичным, поскольку обычно требует длительного времени для повторной синхронизации. С другой стороны, когда имитатор ООМ (20 на фигуре 2) не получает опорные данные с использованием наблюдаемого сигнала имитатора GPS, задержка времени, вызванная повторной синхронизацией имитатора ООМ, может быть исключена, если только опорные данные изменяются заранее определенным образом, что учтено в базе данных заранее определенного ответа ООМ, описанной выше.
На фигуре 3 показана блок-схема проверочной компоновки, на которой более подробно представлена улучшенная компоновка проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, построенная в соответствии с настоящим изобретением. Как показано на фигуре 3, проверяемое устройство 10, так же обозначенное, как мобильная станция (МС), принимает сигналы одновременно от имитатора 12 базовой станции (БС, BS), которая может имитировать одну или несколько базовых станций, и от имитатора 14 GPS. Если МС 10 имеет один радиочастотный (СРЧ, RF) вход, тогда два сигнала имитатора комбинируют с использованием сумматора мощности или смесителя 16 с известным значением затухания.
Система по фигуре 2, предпочтительно, работает в соответствии со стандартом IS-801-1, пропагандируемым промышленностью связи для использования в сетях МДКР сотовой телефонной связи. Обычно поток данных в соответствии со стандартом IS-801-1 организован в форме пакетных сообщений данных, которые являются прозрачными для имитатора БС. Такие пакетные сообщения формируются имитатором 20 ООМ. Однако, если имитатор БС с возможностью обработки пакетных данных является недоступным, тогда разрешено использовать альтернативный способ передачи сообщений между МС 10 и имитатором 20 ООМ. Например, можно передавать пакеты TCP/IP (протокол управления передачей данных в сети Интернет, предназначенный для объединения неоднородных сетей), если имитатор базовой станции обладает возможностью обслуживания данных по выбору, или если МС может быть подключена к имитатору ООМ непосредственно через порт передачи данных МС.
В одном варианте выполнения имитатор ООМ может содержать средство программного приложения, выполняемое на персональном компьютере (ПК) или на другом устройстве типа недорогого компьютера, которое позволяет записывать и получать вспомогательные данные, как более подробно описано ниже. В этом случае ПК действует как контроллер имитатора ООМ и использует данные, записанные в базу данных ПК. В другом варианте выполнения, имитатор ООМ может включать контроллер 22 и базу 24 данных, используемые для записи и получения вспомогательных данных.
Обычно может поддерживаться синхронизация по времени и частоте между имитатором 12 БС и имитатором 14 GPS, поскольку во многих вариантах выполнения МС получает системное время GPS по сети МДКР. Например, в системе, построенной на основе стандартов IS-95, IS-2000 или WCDMA, БС принимает системное время GPS от приемника GPS и синхронизирует свое время МДКР c системным временем GPS. MC, принимающая сигнал МДКР от БС, позволяет выделять системное время GPS из принятого сигнала МДКР.
В проверочной компоновке, показанной на фигуре 3, синхронизация по времени и частоте может быть достигнута по двум отдельным каналам связи. В одном канале связи для синхронизации по частоте можно использовать стандартный сигнал с частотой 10 МГц, как для имитатора БС, так и для имитатора GPS. Направление сигнала должно быть установлено так, что часы с более высокой точностью будут сконфигурированы как источник. На фигуре 3 показан имитатор БС, используемый в качестве источника времени. При использовании другого канала связи для синхронизации системного времени можно использовать стандартный сигнал 1 импульс в секунду, передаваемый имитатором базовой станции. Как имитатор БС, так и имитатор GPS заранее установлены с возможностью включения в работу в один и тот же заранее заданный момент опорного времени, например, при появлении первого стробирующего импульса.
В общем, для обеспечения соответствующей точности частоты должно быть достаточно стандартных возможностей имитатора 14 GPS. Однако обеспечение соответствующей точности по времени обычно является более сложным. Например, выборка импульса 1 импульс в секунду обычно осуществляется со скоростью, недостаточной для обеспечения требуемой точности синхронизации по времени. Возможное решение этой проблемы состоит в независимом измерении смещения по времени. Как только обеспечивается исходная синхронизация времени между имитаторами БС и GPS, можно использовать захват частоты для поддержания смещения по времени между имитаторами БС и GPS. При этом достаточно выполнять запись одиночного измерения смещения точного времени за один цикл проверки.
Примеры типичных проверочных компоновок
Следующие примеры уровней различных сигналов приведены в качестве иллюстрации возможно используемых уровней. При этом для специалистов в данной области техники будет очевидно, что также можно использовать другие уровни. Например, девиация частоты от номинального значения, как для имитатора БС, так и для имитатора ООМ обычно составляет меньше, чем приблизительно ±0,02 промилле (частей на миллион). Уход частоты, как для имитатора БС, так и для имитатора GPS, обычно составляет меньше, чем приблизительно ±0,06 Гц/с. Смещение фазы между несущими имитатора БС и имитатора GPS (после деления частоты для соответствия меньшей из этих двух частот) будет постоянным в пределах приблизительно ±0,2 радиана в течение проверки. Смещение синхронизации между имитаторами БС и GPS (то есть смещение между системным временем МДКР и GPS), в общем, будет меньше чем приблизительно ±10 мкс. Смещение синхронизации между имитаторами БС и GPS обычно измеряют с точностью лучшей, чем приблизительно ±10 нс.
Для улучшения испытаний задержка распространения (например, задержка в кабелях и в других аппаратных элементах) должна быть приблизительно одинаковой между имитатором 12 БС и в MC 10 и между имитатором 14 GPS и МС 10. Как правило, это требование удовлетворяется при использовании кабелей приблизительно одинаковой длины. Задержка распространения между имитаторами БС и GPS в МС также может быть исправлена путем регулирования смещения по времени между имитаторами БС и GPS для учета смещения задержки на распространение.
Имитатор БС передает сигнал, например, с уровнем приблизительно - 56 дБм/Bт, с установкой отношения Ec/Ior для пилот-сигнала и потока данных на уровне приблизительно -7 дБ и приблизительно -7,3 дБ, соответственно, где Ec представляет энергию сигнала, содержащуюся в одном элементарном сигнале расширенной последовательности, в то время как Ior представляет суммарную мощность передатчика имитатора БС. В одном варианте выполнения не используют модели канала и имитацию сценариев передачи. В других вариантах выполнения модели канала могут использоваться, и сценарии передачи могут имитироваться в комбинации друг с другом или по отдельности.
Уровни сигнала имитатора БС соотносят с входным разъемом антенны МС. В течение проверки фактические параметры настройки имитатора БС можно регулировать для учета всех потерь в кабеле, разъеме и объединителе, так что можно поддерживать номинальные значения на входе антенны МС. Как правило, допустимая ошибка уровня мощности составляет меньше, чем приблизительно 2 дБ.
Обычно имитатор 14 GPS формирует следующие сигналы: сигналы, представляющие множество спутников GPS, с независимыми траекториями, с погрешностью фазы, соответствующей не больше чем приблизительно 2 метра по ошибке псевдодальности. Имитатор 14 GPS также передает положение спутников и сигнал синхронизации на основе входных эфемеридных данных, в которых заполнены все поля эфемеридных параметров. Фазу сигнала обычно устанавливают динамически на основе положений спутников и пользователя, и она может включать добавленное смещение, получаемое на основе моделей задержки в ионосфере, тропосфере и групповой задержки. Имитатор 14 GPS также может быть установлен для имитации положения пользователя, как неподвижного, так и находящегося в движении, например, по круговой траектории. Кроме того, имитатор 14 GPS модулирует сигнал спутника навигационными битами, используя заданный поток битов, так что он соответствует имитируемому системному времени GPS и эфемеридным и другим навигационным данным. Кроме того, имитатор GPS устанавливает уровни мощности сигналов спутника на требуемом уровне. Уровни мощности обычно соотносят по входному разъему антенны МС. Во время проверки фактические параметры настройки имитатора GPS могут быть откорректированы, для учета потерь в кабеле, разъеме и в объединителе так, чтобы можно было поддерживать требуемые номинальные значения на входе антенны МС. Как правило, максимальная допустимая ошибка уровня мощности составляет приблизительно 2 дБ.
Установку совокупности спутников GPS, системного времени и опорного местоположения обычно выполняют с использованием справочника "golden reference" Ephemeris and Almanac ("золотой справочник" эфемериды и календарь), и справочник "golden reference" обычно используют при всех измерениях. Выбранная совокупность спутников GPS и выбранные опорные значения времени и местоположения должны позволить выбирать подгруппы спутников, содержащие требуемое количество спутников, составляющих требуемое значение горизонтального спада местоположения (ГСМП, HDOP). И, в общем, все поля данных в справочнике Ephemeris and Almanac должны быть заполнены ненулевыми значениями, которые можно считать типичными.
Обычно измерение начинают в заранее заданный опорный момент времени, и в заранее заданном опорном местоположении, которые запрограммированы в имитаторе GPS. Опорное время выбирают в соответствии со временем применимости выбранных эфемерид. Как правило, опорное время следует выбирать после первого Номера Недели (НОН, WIN), (то есть после октября 1999).
Имитатор ООМ
Обычно, до разработки настоящего изобретения, для проверки МС необходимо было использовать сложный эмулятор ООМ, и такой сложный эмулятор ООМ должен был соответствовать ООМ с полным набором функций. Один из возможных вариантов состоял в использовании для проверки МС коммерчески поставляемого ООМ. Недостаток такого подхода состоит в том, что любой дефект или ошибка в программном обеспечении ООМ могли изменить результаты проверки МС для разных экземпляров МС. Кроме того, поскольку вспомогательные данные GPS зависят от времени, нельзя было гарантировать однородность ответов при проверке ООМ в различных циклах проверок с использованием различных МС. Технология, описанная ниже, в которой применяют описанный выше эмулятор ООМ, позволяет решить эти проблемы. В этой технологии используют имитатор ООМ в соответствии с настоящим изобретением, который представляет собой совместимое устройство для проверки и который позволяет отделить определение рабочих характеристик имитатора МС от рабочих характеристик имитатора ООМ. Один из аспектов этой технологии состоит в том, что ответы имитатора 20 ООМ заранее определены и остаются постоянными во всех циклах проверки.
Имитатор 20 ООМ, построенный в соответствии с требованиями настоящего изобретения, распознает запросы, поступающие от проверяемой МС, и отвечает на них. Как правило, имитатор 20 ООМ анализирует принимаемые сообщения, выделяет поле, которое идентифицирует тип запроса, такое как поле REQ_TYPE, в соответствии со стандартом IS-801-1, и определяет время поступления сообщений. Имитатор 20 ООМ формирует ответ на основе типа поступившего запроса и времени поступления запроса. Имитатор ООМ использует значения типа запроса и времени поступления запроса, как индексы массива или базы данных, в которых записаны все возможные ответы имитатора ООМ. Таким образом, значения поля данных в ответах не требуется вычислять в имитаторе ООМ в режиме реального времени, как выполняется при использовании эмулятора ООМ. Вместо этого используют ответы, заранее определенные и загруженные в массив базы данных.
При использовании времени в качестве пределов индекса ограничивают продолжительность ответа на запросы имитатора ООМ. Например, если имитатор 20 ООМ отвечает на запросы МС, формируя сообщения для передачи вспомогательных данных для захвата GPS с приращениями 1,28 с, (период 1,28 с представляет собой разрешающую способность поля TIME_OF_APP сообщения Provide GPS Acquisition Assistance (предоставить вспомогательные данные для захвата GPS), определенного в IS-801-1), соответствующим времени поступления запроса, тогда можно поддерживать максимальную продолжительность проверки 40 минут, при записи 40·60/1,28=1875 сообщений Provide GPS Acquisition Assistance.
Когда запрошенное сообщение на предоставление вспомогательных данных для захвата GPS поступает от МС, имитатор 20 ООМ отвечает сообщением с наименьшим значением времени поступления, превышающим время поступления индекса, с учетом заданного смещения. Использование заданного смещения с определенным значением позволяет МС принимать сообщение от имитатора ООМ до того, как станут действительными значения, содержащиеся в сообщении ООМ. Другими словами, значения в сообщении ООМ, переданном в МС, информирует МС об установках, которые МС должна принять в некоторый момент времени в будущем. ООМ посылает значения, которые будут действительными в некоторый момент времени в будущем, для обеспечения возможности учета неизвестных задержек, возникающих между передачей сообщения ООМ и моментом времени, когда МС сможет принять и обработать информацию, содержащуюся в сообщении. Аналогичные алгоритмы индексирования времени используются в имитаторе ООМ, когда имитатор ООМ принимает запросы от МС на передачу сообщений других типов, например, запросы на передачу сообщений GPS Location Assistance, GPS Sensitivity Assistance, GPS Navigation Message Bits и GPS Almanac Correction (вспомогательные данные для определения местоположения GPS, вспомогательные данные для установки чувствительности GPS, битовые навигационные сообщения GPS и коррекция календаря GPS).
Ответы Имитатора ООМ
Ответы имитатора 20 ООМ на любое сообщение, представляющее собой запрос МС на предоставление вспомогательных данных, определяются с помощью заранее выполненных расчетов, для которых используют отобранные наборы данных из справочника Almanac and Ephemeris, соответствующие выбранным опорным значениям времени и местоположения.
В системе IS-801-1 некоторые из типов сообщений в запросах МС содержат записи параметра. В этих записях параметра содержатся дополнительные поля данных, которые, как ожидает МС, будут включены в ответы. Реальный ООМ или эмулятор ООМ ответил бы на запросы МС на основе значений, которые приведены в записи параметра запроса. В соответствии с настоящим изобретением, ответы имитатора ООМ могут быть подготовлены независимо от записей параметра запроса, что, в результате, упрощает имитатор ООМ. Следует отметить, что при использовании ответов такого типа могут быть исключения, например, когда запрос описывает предпочтительный тип координат при выборе одного из двух сообщений Provide GPS Location Assistance (предоставить вспомогательные данные для определения местоположения GPS). Использование этой технологии может привести к получению ответов от имитатора ООМ, отличающихся от соответствующего ответа фактически используемого ООМ или эмулятора ООМ. Например, имитатор ООМ может не полностью соответствовать спецификации IS-801-1. Неполное соответствие не должно создавать проблему, поскольку большая часть отклонений от спецификации IS-801-1 относится к необязательным или "возникающим при определенном условии" требованиям, и поэтому для них не требуется полного соответствия. Кроме того, сценарий проверки может быть вполне реалистичным, поэтому при фактическом использовании МС может получать незатребованные ответы от ООМ, которые были отправлены до получения соответствующего запроса ООМ. В этой ситуации параметры запроса и ответ могут быть несогласованными. Таким образом, такое несоответствие при передаче сообщений может быть более эффективным при проверке устойчивости алгоритма анализа МС.
Кроме того, поскольку имитатор ООМ всегда формирует одинаковый ответ, независимо от полей данных запроса, все дополнительные поля данных обычно включены в ответ. Поскольку все дополнительные поля обычно включены в ответ, обеспечивается получение МС всей запрошенной ею информации. Таким образом, рабочие характеристики МС не будут ухудшены, из-за того, что имитатор ООМ не предоставил дополнительное поле, запрошенное МС.
В одном варианте выполнения, имитатор ООМ допускает одно исключение из правила включения в ответ всех дополнительных полей. В этом варианте выполнения, поле CLOCK_INCL в сообщении Provide Location Response (предоставить ответ, содержащий данные местоположения) установлено в ноль. В случае эмулятора ООМ, параметры часов были бы рассчитаны на основе результатов измерений псевдодальности, возвращенных МС, и эти рассчитанные значения были бы включены в сообщение Provide Location Response, и значение CLOCK_INCL было бы установлено в единицу. Однако, в случае имитатора ООМ, параметры часов не рассчитываются, и обратная посылка неправильных данных часов могла помешать работе МС. Однако, поскольку требование к БС в отношении параметра CLOCK_NCL, в IS-801-1, задано как "возникающее при определенном условии", такая установка является приемлемой.
На фигуре 4 показана таблица 400, представляющая различные запросы МС и соответствующие ответы имитатора ООМ для предпочтительного варианта выполнения. Таблица 400 на фигуре 4 содержит три колонки, одна из которых содержит различные запросы 402 МС, вторая колонка содержит ответы 404 имитатора ООМ на соответствующий запрос МС, и третья колонка содержит примеры значений 406, которые находятся в некоторых из различных полей ответа.
На фигуре 4 используются следующие обозначения:
Ttest = Максимальная продолжительность времени проверки в единицах 1 секунда (рекомендовано 3600 секунд),
Nresp = Количество сохраненных ответных сообщений при одной проверке,
PNref = Опорное значение PN, установленное в имитаторе БС, в единицах по 64 элементарных сигнала,
Тreq = Системное время ООМ в момент прихода запроса, в единицах 1 секунда,
LATref, LONGref, HEIGHTref=Координаты опорного местоположения те же, что и координаты горизонтального местоположения обслуживающей БС,
OFFSETant = смещение по высоте между обслуживающей антенной БС и опорным местоположением,
LATМС, LONGМС, HEIGHTМС = координаты МС, определенные для модели имитатора GPS, установленной на подвижном транспортном средстве,
SPEEDhorМС, HEADINGМС, SPEEDvertМС = параметры движения МС, определенные для модели имитатора GPS, установленной на подвижном транспортном средстве,
WIN = номер недели опорного времени timeT0a=Time of Almanac (время календаря) в справочном Календаре.
Следует отметить, что местоположение МС (LATМС, LONGМС и HEIGHTМС) и значение скорости в местоположении МС (SPEEDhorМС, HEADING и SPEEDvertМС), переданные имитатором ООМ, могут быть преднамеренно смещены на значения, имитирующие ошибку определения местоположения и скорости. Также следует отметить, что любая часть задержки на распространение от БС - до - МС, которая предполагается с учетом геометрической компоновки, описанной в сценарии проверки, но которая в действительности не имитируется проверочным оборудованием или с использованием присоединяемой линии задержки, должна быть включена в поля TIME_CRRCTION_REF и TIME_CORRECTION в сообщении Provide Base Station Almanac (предоставить календарь базовой станции), передаваемым имитатором ООМ.
В одном варианте выполнения имитатор ООМ разделяет ответное сообщение на части для обеспечения соответствия потока данных PDDM (СДОМ, сообщений данных определения местоположения) в прямой линии связи (ПЛ, FL)и меньше требуемого количества байт, например, меньше приблизительно 200 байт.
Для имитации совместного использования канала с кодовым разделением МДКР с голосовым потоком данных E911, доступная полоса пропускания для сообщений ПЛ, содержащих данные определения местоположения, может быть ограничена. Имитатор ООМ может организовывать очередь исходящих сообщений и разрешать передачу данных только с пониженной скоростью, например, со скоростью 20% от полной скорости голосового канала. Например, он может разрешать передачу только со скоростью 20%, при этом доступная емкость ПЛ для передачи сообщений, содержащих данные определения местоположения, может приблизительно составлять 1720 бит в секунду.
Потоки вызовов, используемые при проверке
В стандарте IS-801-1 не определены обязательные потоки вызовов. Обычно обмен сообщениями основан на протоколе запрос-ответ, но возможность использования незапрашиваемых ответов позволяет в любой момент времени отойти от этого требования. Общее количество возможных потоков вызовов составляет сотни, что затрудняет проведение полной проверки. Кроме того, конкретный поток вызовов не может быть принудительно организован в одностороннем порядке со стороны БС.
По описанным выше причинам полный поток вызовов не будет установлен для проверки в соответствии с настоящим изобретением. Проверка всегда начинается с РСДОМ со стороны имитатора ООМ, то есть все проверки имеют окончание на мобильном устройстве (ОМ, MT). Проверки, начинающиеся с мобильного устройства (НМ, MO) могут также выполняться, если инициация сеанса определения местоположения МС может быть активизирована внешними средствами. Имитатор ООМ посылает сообщения, и также посылает ответы на любые запросы МС, принятые во время сеанса определения местоположения.
В приведенном ниже примере потоки вызовов заданы для проверки MO GPS. Следует отметить, что потоки вызовов для проверок AFLT или гибридных проверок могут быть обозначены аналогичным образом, с использованием соответствующих сообщений определения местоположения, определенных в IS-801-1.
На фигуре 5 показана блок-схема потока вызовов для проверки, в которой имитатор ООМ инициирует проверку измерения псевдодальности. В этом примере МС не имеет возможности вычислять местоположение. Как показано на фигуре 5, имитатор 502 ООМ посылает сообщение 504 Requests МС Information (запросить информацию МС). МС 506 принимает запрос и отвечает, отправляя сообщение 508 Provide МС Information (предоставить информацию МС). МС 506 затем отправляет сообщение 509 Request GPS Acquisition Assistance. Имитатор 502 ООМ принимает запрос и отвечает, отправляя сообщения 510 Provide GPS Acquisition Assistance (предоставить вспомогательные данные для захвата GPS). МС 506 принимают сообщение 510 Provide GPS Acquisition Assistance и анализируют его для использования значений сообщения при измерениях по определению. Имитатор 502 ООМ затем посылает сообщение 512 Request Pseudorange Measurement (запросить измерение псевдодальности). МС 506 принимают сообщение 512 Request Pseudorange Measurement и действует в соответствии с ним. В частности, МС 506 после завершения измерений по определению псевдодальности посылает сообщение 514 Provide Pseudorange Measurement (предоставить результат измерения псевдодальности) в имитатор ООМ.
На фигуре 6 показана блок-схема потока вызовов для проверки, в которой имитатор ООМ инициирует проверку определения местоположения, когда МС выполнена с возможностью рассчитывать местоположение. Как показано на фигуре 6, имитатор 502 ООМ посылает сообщение 504 Requests МС Information (запросить информацию МС). МС 506 принимает запрос и отвечает, посылая сообщение 508 Provide МС Information (предоставить информацию МС). МС 506 затем посылает сообщение 609 Request GPS Ephemeris (запросить эфемеридные данные GPS). Имитатор 502 ООМ принимает запрос и отвечает, посылая сообщение 610 Provide GPS Ephemeris (предоставить эфемеридные данные GPS). МС 506 принимает сообщение 610 Provide GPS Ephemeris и анализирует его для использования значений этого сообщения при определении местоположения. Имитатор 502 ООМ затем посылает сообщение 612 Request Location Response (запросить ответ, содержащий данные местоположения). МС 506 принимает сообщение 612 Request Location Response и действует в соответствии с ним для определения местоположения. МС 506, после завершения определения местоположения, передает определенное местоположение в форме сообщения 614 Provide Location Response (предоставить ответ, содержащий данные местоположения) в ООМ.
Для сообщений 512 Request Pseudorange Measurement и 612 Request Location Response, поле PREF_RESP_QUAL сообщения обычно будет установлено в "010".
Повторные измерения
Обычно минимальная проверка рабочих характеристик требует сбора статистических данных, получаемых в ходе нескольких испытательных циклов. Существует несколько различных технологий получения результатов повторных измерений. Одна технология состоит в полном обнулении всей проверочной компоновки между измерениями. Эта технология позволяет провести каждое измерение в то же системное время, что упрощает генерирование сообщений ответа ООМ. Однако эта технология имеет несколько недостатков. Один из этих недостатков состоит в организационных сложностях, которые связаны с необходимостью повторного начала всей последовательности проверки для каждого измерения. Другой недостаток состоит в отсутствии многообразия данных, получаемых в измерительной среде. Один из подходов преодоления обоих этих недостатков состоит в проведении периодических измерений. Периодические измерения будут означать обнуление или синхронизацию имитаторов БС и GPS и связанную с этим необходимость выполнять новый вызов только в начале проверки, после чего МС переходит в периодический режим измерений.
Проблема, связанная с таким подходом периодических измерений, состоит в том, что она имитирует сценарий, который не эквивалентен проведению измерений в отдельных независимых сеансах E911. Иллюстрацией этого является случай, когда МС использует предварительные результаты измерения для получения или улучшения результатов текущих измерений, например, путем фильтрации или путем выполнения кодового распространения фазового окна. В этом случае создается нежелательная систематическая ошибка при определении рабочих характеристик МС.
Возможное решение состоит в использовании подхода индивидуальных измерений. Для введения большего разнообразия проверочная компоновка может быть инициализирована с разным системным временем для каждого измерения. Важно обеспечить полный сброс МС между измерениями, который может быть выполнен путем изменения времени проверки системы, например, путем изменения времени проверки системы более чем на один месяц, между измерениями. Изменение системного времени должно обеспечить адекватную проверку возможностей МС по детектированию ошибок из-за устаревания вспомогательных данных, которые могут быть в ней записаны.
Статистическая оценка
В общем, существуют две причины необходимости использования повторных измерений при проверке. Во-первых, проверочные данные, оценка которых выполняется, часто собирают в результате измерений, проведенных в условиях шумов, то есть требуется использовать статистические методы. Во-вторых, предпочтительно проводить измерения при проверке в разных условиях внутреннего сигнала, таких как положение в кодовой фазе и различные доплеровские окна, C/A (текущее положение отсчета) авто- и кросс-корреляции. Одна из технологий, используемых для достижения этого, основана на сценарии наихудшего случая, который происходит скорее на основе вероятностных ожиданий, чем приложения условий, в частности, направленных на создание этих сценариев. Одна из причин не использовать последние, состоит в том, что обычно такие сценарии наихудшего случая происходят только в течение коротких периодов времени и обычно не существует способа обеспечить проведение измерений МС точно в эти моменты времени.
Обе эти причины могли бы подразумевать использование минимального количества измерений. Существует заметная разница между природой таких требуемых минимальных количеств. Если данные проверки собирают в зашумленной среде, количество измерений может быть получено математически и обычно зависит от требуемого достоверного уровня и от фактических результатов испытаний. Например, если собранная статистика выборки указывает, что МС при проверке значительно превышает установленные для нее требования, то проверка может быть закончена раньше, чем могло быть в другом случае. Требуемое количество измерений для достижения достаточного разнообразия во внутренних условиях сигнала не зависит от характеристик МС, но его более трудно определить.
Основываясь на приведенном выше описании, количество проводимых измерений может составлять наибольшее из требуемых количеств, например, 100 измерений, необходимых для получения требуемого разнообразия во внутренних условиях сигнала, или количество, необходимое для достижения требуемого уровня статистической достоверности. Определение требуемого количества для получения требуемого уровня статистической достоверности будет описано ниже.
Для оценки статистических значений накопленных ошибок выбирают необходимый способ. Существует множество способов, среди которых можно выбрать один, который состоит в установлении порогового значения по ошибке RMC (среднеквадратичного действующего значения). Проблема при использовании этого или аналогичных подходов состоит в том, что они принимают "благоприятную" функцию распределения вероятности ошибки, поскольку они сильно смещены в сторону значительных ошибок. Известно, что в системе GPS или AFLT, всякий раз, когда появляется сигнал ложной тревоги, получаемая в результате ошибка будет приблизительно равномерно распределена по большому диапазону, и, таким образом, ошибка составит непредсказуемо большое значение. Включение этих ошибок в статистику будет практически всегда снижать уровень статистической достоверности до неприемлемо низких уровней. Способ определения этого ограничения состоит в установке пределов вероятности по большим ошибкам. Один из таких способов состоит в применении критерия оценки типа σ1, σ2. В этом способе задают два значения X и У. Затем в ходе проверки требуется, чтобы ошибка была меньше, чем X с вероятностью, по меньшей мере, 67%, и меньше, чем Y с вероятностью, по меньшей мере, 95%.
При попытке установить оценку вероятности на основе ограниченного количества выборок следует использовать здравую статистическую аргументацию. Минимальная проверка рабочих характеристик не оправдывает ни одни из данных способов, но требует, чтобы указанные пределы вероятности были удовлетворены приблизительно на уровне достоверности, по меньшей мере, 90%.
Ниже поясняется пример приемлемого способа оценки. В этом примере параметры составляют: X=50 м, У=150 м, где X представляет собой предел ошибки σ1, и У представляет собой предел ошибки σ2. Заданные вероятности составляют: p1=0,67, p2=0,95 и С=0,9, где С представляет собой требуемый уровень достоверности. После проведения n измерений рассчитывают значение ошибок e1, е2, K, en. Затем числа NX и NY определяют в следующем виде.
 ,
,
 ,
,
где I(условие) представляет собой индикаторную функцию, имеющую значение "1", если условие истинно, "0" в противном случае, то есть рассчитывают количество раз, когда ошибка превышает пороговое значение.
Затем проверка считается удовлетворительной, если удовлетворяются оба следующих условия.
 ,
,
 ,
,
где χ2(p, k) представляет собой значение x так, что P(X>x)p, где Xпредставляет собой случайную переменную с k-ой степенью свободы с распределением хи-квадрат.
Допустимы также другие, статистически эквивалентные способы. При проверке множества типов возвращаемых данных проверка может быть остановлена, только если достигаются требуемые уровни достоверности для всех типов данных. И снова, количество проверок сводят к минимуму, определенному в соответствии с описанным выше требованием.
Следует отметить, что также может быть установлено аналогичное условие остановки проверки, когда может быть установлен отказ при заданном уровне достоверности. При этом может быть указан требуемый уровень достоверности, например, 95%, который обеспечивает достижение требуемого уровня рабочих характеристик МС, но также позволяет уменьшить время, требуемое для проверки. Требуемый уровень достоверности для определения неудачной проверки обычно устанавливают на другом значении, чем требуемый уровень достоверности для объявления успешной проверки.
после неудачной проверки могут быть разрешены повторные испытания, но в отчете проверки должны быть указаны причина и точные обстоятельства.
Способы оценки данных
Обычно результаты проверки могут быть собраны в следующих двух отчетах. Первый отчет содержит минимальный стандартный отчет, который указывает, прошла ли МС применимые проверки или не прошла. Обычно вместе с результатами включают все соответствующие данные, такие как время, дата и место проведения проверки, модели и серийные номера проверочного оборудования, точная проверочная установка и количество выполненных измерений. Второй отчет содержит дополнительный полный отчет по рабочим характеристикам и содержит все собранные статистические данные, обычно представленные в форме функций распределения кумулятивных вероятностей (ФРК, CDF).
Способы оценки для МС, не обладающей возможностью расчета местоположения
В случае МС, которая не обладает возможностью расчета положения, проверка может включать оценку элементов возвращенного ответа Provide Pseudorange Measurement (предоставить результат измерения псевдодальности) в случае проверки GPS или возвращенных элементов ответа Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала) при проверке AFLT.
При сборе результатов определенного измерения, проводящий проверку оператор ожидает, пока не истечет период времени, указанный в поле PREF_RESP_QUAL (поле Preferred Response Quality (предпочтительное качество ответа) в сообщении Request Pseudorange Measurement (запросить измерение псевдодальности) или в сообщении Request Pilot Phase Measurement (запросить измерение фазы пилот-сигнала) в соответствии со спецификацией IS-801-1), или пока не будут приняты все части элемента ответа, в зависимости от того, что произойдет первым. Все части элемента ответа приняты, когда в принятом ответе будет соблюдено условие МС PART_NUM = TOTAL_PARTS (поля Part Number и Total Parts (количество частей и общее количество частей) в IS-801-1 сообщения Provide Pseudorange Measurement (предоставить результат измерения псевдодальности) или сообщения Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала)). Затем определяют общее количество возвращенных записей псевдодальности или записей фазы пилот-сигнала во всех частях ответа для заданных измерений. Из этого количества будут исключены записи, в которых значения PS_RANGE_RMC_ER (поле Pseudo-range RMC Error (среднеквадратичное действующее значение ошибки псевдодальности) в сообщении IS-801-1 Provide Pseudorange Measurement (предоставить результат измерения псевдодальности)) или RMC_ERR_PHASE (поле RMC Error Phase (среднеквадратичное действующее значение ошибки фазы) в сообщении IS-801-1 Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала)), установлены в "111111". Кроме того, все значения в таких записях будут исключены из дальнейшей оценки. Следует отметить, что в определенном количестве псевдодальностей ни один из спутников не может быть подсчитан дважды, и в определенном количестве фаз пилот-сигналов ни один из пилот-сигналов не может быть учтен дважды.
Если общее количество псевдодальностей или фаз пилот-сигналов для заданных измерений будет меньше, чем минимальное значение, определенное для этого сценария проверки, тогда измерение будет объявлено как неудачное. Это минимальное количество может быть определено на основе требуемого расчета местоположения.
Возвращенные значения могут быть включены в статистику, даже если они относятся к неудачным измерениям; но количество неудачных измерений должно быть записано отдельно. В одном варианте выполнения для того, чтобы пройти проверку, следует установить, что вероятность неудачных измерений будет меньше, чем требуемое значение pf или, другими словами, выход будет больше, чем 1 - pf. В одном варианте выполнения, уровень достоверности может быть установлен равным, по меньшей мере, приблизительно 70%. Относительно низкий уровень достоверности, равный приблизительно 70%, отражает практический предел количества измерений. Кроме того, для различных сценариев проверки могут быть указаны различные значения pf.
Стандарт минимальных значений GPS для МС без возможности расчета положения
Предпочтительно проверять выход, точность и своевременность возвращенных результатов измерений псевдодальности. Другие возвращенные значения также проверяют, но требования к точности для этих значений обычно существенно ниже, с учетом того факта, что они могут оказывать только опосредованное влияние на точность позиционирования. Некоторые из возвращаемых значений описаны ниже:
SV_CODE_PH_WH, SV_CODE_PH_FR
Оценка величины SV_CODE_PH_WH, SV_CODE_PH_FR (поля Satellite Code Phase - Whole Chips и Satellite Code Phase - Fractional Chips (фаза кода спутника для всех элементарных сигналов и фаза кода спутника для части элементарных сигналов) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-801-1) может быть оценена следующим образом. Поскольку эфемериды, TIME_REF и положение МС (в TIME_REF) являются известными, значения дальности от МС-до-спутника могут быть точно рассчитаны для всех видимых спутников. Перед дальнейшей обработкой эти дальности корректируют для каждого из следующих параметров:
1. Смещение времени от имитатора GPS до имитатора БС.
2. Значения смещения задержки распространения.
3. Указанное в отчете значение MOB_SYS_T_OFFSET (поле Mobile System Time Offset (смещение времени мобильной системы) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-801-1).
4. Любая известная ошибка, вводимая имитатором GPS (например, некоторое влияние доступности или задержки в ионосфере).
После выполнения всех вышеуказанных коррекций ошибка между рассчитанными значениями дальности и измеренными значениями дальностями будет определена с игнорированием возвращенных значений, для которых значение PS_RANGE_RMC_ER (поле Pseudo-range RMC Error (среднеквадратичное действующее значение ошибки псевдодальности) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-801-1) было установлено в "111111" в МС. Оценку получаемой в результате группы ошибок псевдодальности проводят с помощью проверки типа σ1, σ2. Следует отметить, что в случае смешанного значения отношения сигнал/шум (ОСШ, SNR), могут быть указаны различные пределы ошибки для SV (КК, космических кораблей) с высоким значением ОСШ и с низким значением ОСШ.
Известно, что возвращаемые результаты измерения псевдодальности могут содержать систематическую ошибку, вызванную смещением между системным временем МС и временем GPS. Для устранения такой систематической ошибки среднее значение ошибки вычитают от значений отдельных ошибок псевдодальности, и снова, остаточные ошибки оценивают с помощью проверки типа σ1, σ2. Проводят оценку как не откорректированных "абсолютных", так и откорректированных "относительных" ошибок псевдодальности, и указанные уровни точности обычно являются более жесткими в случае откорретированной ошибки, чем в случае не откорректированной ошибки.
PS_ DOPPLER
Ошибка, представленная в возвращаемом поле PS_DOPPLER (поле Pseudodoppler (псевдодоплеровское смещение) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-801-1), может быть оценена следующим образом. Поскольку эфемериды, TIME_REF и положение МС являются известными, можно рассчитать истинное значение сдвига спутника. В случае подвижного сценария при расчете истинного доплеровского значения также требуется учитывать ненулевую скорость МС. Разницу между истинными значениями и возвращаемыми псевдодоплеровскими значениями рассчитывают для получения ошибки, игнорируя значения, для которых значение PS_RANGE_RMC_ER было установлено в "111111".
Известно, что возвращаемые измерения псевдодоплеровского смещения могут содержать систематическую ошибку, вызванную смещением между частотой часов МС и истинной частотой GPS. Для устранения этой систематической ошибки среднее значение ошибки вычитают из отдельных доплеровских ошибок, и оценку остаточных ошибок проводят с использованием проверки типа σ1, σ2. Для доплеровской ошибки проводят оценку только этих откорректированных ошибок "относительных" измерений.
SV_CNO
Рассчитывают логарифм отношения между возвращаемым значением SV_CNO (поле Satellite C/N0 (сигнал/шум спутника) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-S01-1) и номинальным значением, заданным для этой проверки. Затем определяют абсолютное значение рассчитанной ошибки, где отношение ошибки выражают в единицах 1 децибел. Игнорируют значения, для которых PS_RANGE_RMC_ER было установлено в "111111". Полученную в результате группу абсолютных значений оценивают с использованием проверки типа σ1, σ2. Следует отметить, что отношение сигнал/шум (ОСШ) устанавливают в имитаторе GPS таким образом, что обеспечивается номинальное значение на входном разъеме антенны МС. Это включает коррекцию установок имитатора GPS для учета всех потерь в кабеле, разъеме и потерь в объединителе. Поэтому нет необходимости проводить коррекцию ОСШ в процессе оценки при проверке.
PS_RANGE_RMC_ER
Для проверки возвращенного значения PS_RANGE_RMC_ER (поле Pseudorange RMC Error (среднеквадратичное действующее значение ошибки псевдодальности) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-801-1), рассчитывают следующую статистику. С учетом отдельных псевдодальностей рассчитывают откорректированные "относительные" ошибки, в соответствии с приведенным выше описанием, для получения xi, где i представляет собой индекс псевдодальности. Игнорируют значения, для которых PS_RANGE_RMC_ER="111111". Делят каждое значение остаточной ошибки на соответствующее значение среднеквадратичного действующего значения (RMC), представленного для PS_RANGE_RMC_ER, для получения x'i, 1iN, где N представляет собой количество возвращаемых псевдодальностей, для которых PS_RANGE_RMC_ER". При определении среднеквадратичного действующего значения (RMC), представленного PS_RANGE_RMC_ER, используют срединное значение соответствующего интервала, указанного в Таблице 3.2.4.2-8, определенной в стандарте IS-801-1.
Рассчитывают  . Для того, чтобы пройти эту проверку требуется, чтобы удовлетворялось условие ARB, где А и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения (RMC), условие R должно быть истинным, так что можно использовать, например, значения A=0,5 и В=2.
. Для того, чтобы пройти эту проверку требуется, чтобы удовлетворялось условие ARB, где А и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения (RMC), условие R должно быть истинным, так что можно использовать, например, значения A=0,5 и В=2.
Полные рабочие характеристики измерения GPS для МС без возможности расчета положения
Полный отчет проверки обычно включает следующие положения:
1. Рассчитанный выход.
2. Функция распределения кумулятивных вероятностей (CDF) времени ответа (измеряемого от момента приема запроса МС до приема всех ответов БС).
3. CDF ошибки псевдодальности.
4. CDF доплеровской ошибки.
5. CDF ошибки SV_CNO.
6. Расчетное значение R для PS_RANGE_RMC_ER.
7. Любые другие данные, собранные при оценке, которые можно использовать при определении рабочих характеристик МС.
Стандарт минимальных измерений AFLT для МС без возможности расчета положения
Предпочтительно проверяют выход, точность и своевременность возвращаемых измерений фазы пилот-сигнала. Также проверяют другие возвращаемые значения, но требования к точности для этих значений обычно значительно ниже, с учетом того факта, что они могут иметь только косвенное влияние на точность позиционирования. Некоторые из возвращаемых значений описаны ниже:
PILOT_PN_PHASE
Значение PILOT_PN_PHASE (поле Pilot Measured Phase (результат измерения фазы пилот-сигнала) в сообщении Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала), определенном в IS-801-1) может быть оценено следующим образом. Поскольку известны все значения, такие как имитируемое местоположение базовой станции, TIME_REF_МС, и положение МС (в TIME_REF_МС), разности дальности от МС-до-БС могут быть точно рассчитаны для всех имитируемых базовых станций. Перед дальнейшей обработкой эти дальности корректируют для каждого из следующих параметров:
1. Смещение времени от имитатора БС к имитатору БС.
2. Смещения задержки распространения.
3. Занесенное в отчет значение MOB_SYS_T_OFFSET (поле Mobile System Time Offset (смещение времени мобильной системы) в сообщении Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала), определенном в IS-S01-1).
4. Значения TIME_CRRCTION_REF и TIME_CORRECTION (поля Reference Time Correction и Time Correction (коррекция опорного времени и коррекция времени) в сообщении Provide Base Station Almanac (предоставить календарь базовой станции), определенном в IS-801-1), содержащиеся в базе данных имитатора ООМ.
После выполнения всех вышеуказанных коррекций определяют ошибку между расчетными фазами пилот-сигнала и измеренными фазами пилот-сигнала, игнорируя возвращенные значения, для которых значение RMC_ERR_PHASE (поле RMC Error in Phase Measurement (среднеквадратичное действующее значение ошибки при измерении фазы) в сообщении Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала), определенном в IS-801-1), установленные МС в "111111". Оценку полученной в результате группы ошибок фазы пилот-сигнала производят с использованием проверки типа σ1, σ2. Следует отметить, что в случаях смешанных значений отношения сигнал/шум (ОСШ), могут быть указаны различные пределы ошибки для пилот-сигналов c высоким значением ОСШ и c низким значением ОСШ.
TOTAL_RX_PWR
Рассчитывают логарифм отношения между возвращенным значением TOTAL_RX_PWR (поле Total Received Power (суммарная мощность принятого сигнала) в сообщении Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала), определенном в IS-801-1) и номинальным значением, заданным для этой проверки. Затем определяют абсолютное значение рассчитанных отношений ошибок, где отношения ошибок выражены в единицах 1 децибел. Оценку получаемой в результате группы абсолютных значений производят с использованием проверки типа σ1, σ2. Следует отметить, что суммарную мощность устанавливают в имитаторе БС (и, возможно, в дополнительно используемых шумовых генераторах, имитирующих помехи от ортогональных каналов и соседних ячеек) таким образом, что получают номинальное значение на входном разъеме антенны МС. Это предусматривает коррекцию установок имитатора БС для учета всех потерь в кабеле, разъеме и объединителе. По этой причине нет необходимости производить коррекцию значения TOTAL_RX_PWR в процессе оценки проверки.
REF_PELOT_STRENGTH
Рассчитывают логарифм отношения между возвращенным значением REF_PILOT_STRENGTH (поле Reference Pilot Strength (уровень опорного пилот-сигнала) в сообщении Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала), определенном в IS-801-1) и номинальным значением, заданным для этой проверки. Затем определяют абсолютное значение рассчитанных отношений ошибок, где отношения ошибок выражены в единицах 1 децибел. Оценку получаемой в результате группы абсолютных значений производят с использованием проверки типа σ1, σ2. Следует отметить, что отношение сигнал/шум (ОСШ) устанавливают в имитаторе БС (и, возможно, в дополнительно используемых шумовых генераторах, имитирующих помехи от ортогональных каналов и соседних ячеек) таким образом, что получают его номинальное значение на входном разъеме антенны МС. Это предусматривает коррекцию установок имитатора БС для учета потерь в кабеле, разъеме и объединителе. По этой причине не требуется проводить коррекцию уровня опорного пилотного сигнала в процессе оценки проверки.
PILOT_STRENGTH
Рассчитывают логарифм отношения между возвращенным значением PILOT_STRENGTH (поле Pilot Strength (уровень пилот-сигнала) в сообщении Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала), определенном в IS-801-1) и номинальным значением, заданным для этой проверки. Затем определяют абсолютное значение рассчитанных отношений ошибок, где отношения ошибок выражены в единицах 1 децибел. Игнорируют значения, для которых величина RMC_ERR_PHASE была установлена в "111111". Оценку получаемой в результате группы абсолютных значений производят с использованием проверки типа σ1, σ2. Следует отметить, что ОСШ устанавливают в имитаторе БС (и, возможно, в дополнительно используемых шумовых генераторах, имитирующих помехи от ортогональных каналов и соседних ячеек) таким образом, что получают номинальное значение на входном разъеме антенны МС. Это предусматривает коррекцию установок имитатора БС, для учета всех потерь в кабеле, разъеме и объединителе. По этой причине, не требуется производить коррекцию уровня пилот-сигнала в процессе оценки проверки.
RMC_ERR_PHASE
Для проверки возвращаемого значения RMC_ERR_PHASE (поле RMC Error in Phase Measurement (среднеквадратичное действующее значение ошибки при измерении фазы) в сообщении Provide Pseudorange Measurement (предоставить результат измерения псевдодальности), определенном в IS-801-1), рассчитывают следующие статистические значения. Учитывая отдельные фазы пилот-сигнала, рассчитывают ошибки в соответствии с описанием, приведенным выше, для получения yi, где i представляет собой индекс фазы пилот-сигнала. Игнорируют величины, для которых RMC_ERR_PHASE="111111". Делят каждое оставшееся значение ошибки на соответствующее значение среднеквадратичного действующего значения (RMC), представленного RMC_ERR_PHASE, для получения yi', 1iN, где N представляет собой количество возвращаемых фаз пилот-сигнала, для которых RMC_ERR_PHASE". При определении значения среднеквадратичного действующего значения (RMC), представленного RMC_ERR_PHASE, используют срединное значение соответствующего интервала, указанного в Таблице 3.2.4.2-9, приведенной в стандарте IS-801-1.
Рассчитывают  . Для прохождения этой проверки должно удовлетворяться соотношение AВ, где А и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения (RMC), условие R должно быть истинным, так что можно использовать, например, А=0,5 и В=2.
. Для прохождения этой проверки должно удовлетворяться соотношение AВ, где А и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения (RMC), условие R должно быть истинным, так что можно использовать, например, А=0,5 и В=2.
Полная рабочая характеристика измерений AFLT для МС без возможности расчета положения
Полный отчет проверки обычно включает следующие положения:
Расчетный выход.
Функцию распределения кумулятивных вероятностей (CDF) времени ответа (измеренного от момента приема запроса МС до приема всех ответов БС).
CDF ошибки фазы пилот-сигнала.
CDF суммарной ошибки мощности Rx.
CDF ошибки уровня опорного пилот-сигнала.
CDF ошибки уровня пилот-сигнала.
Расчетное значение R для RMC_ERR_PHASE.
Любые другие данные, собранные в ходе оценки, могут быть полезны для определения рабочих характеристик МС.
Способы оценки для МС с возможностью расчета положения
В случае МС с возможностью расчета положения, проверки содержат оценку возвращаемых сообщений Provide Location Response (предоставить ответ, содержащий данные местоположения). Проверки из секции, описывающей способы оценки для МС без возможности расчета положения, также должны быть включены для проверки соответствия протоколу МС, если она позволяет формировать ответ с использованием сообщений Provide Pseudorange Measurement (предоставить результат измерения псевдодальности) или Provide Pilot Phase Measurement (предоставить результат измерения фазы пилот-сигнала). В качестве примера, с этой целью, можно выбрать любой из сценариев проверки с неподвижным модулем и применить поток вызова, показанный на фигуре 5. МС может пройти эту проверку либо путем отправки приемлемых сообщений Provide Pseudorange Measurements (предоставить результат измерения псевдодальности) или путем отправки отклоненных сообщений на сообщения ООМ Reject Request Pseudorange Measurement (отклонить запрос на измерение псевдодальности) с REJ_REQ_TYPE (поле Reject Request Type (отклонить тип запроса) в сообщении Reject (отклонить), определенном в IS-S01-1), установленных в "0100" и REJ_REASON (поле Reject Reason (причина отклонения) в сообщении Reject(отклонить), определенном в IS-801-1) установленного в значение "000".
При сборе результатов определенных измерений, оператор, проводящий проверку, должен подождать до тех пор, пока не истечет период времени, определенный PREF_RESP_QUAL (поле Preferred Response Quality (предпочтительное качество ответа) в сообщении Request Location Response (запросить ответ, содержащий данные местоположения), определенном в IS-801-1) или до тех пор, пока не поступит сообщение Provide Location Response (предоставить ответ, содержащий данные местоположения), в зависимости от того, что наступит первым. Измерения объявляются неудачными, если сообщение Provide Location Response (предоставить ответ, содержащий данные местоположения) не будет принято в течение заданного периода времени, или если значение LOC_UNCRTNTY_A или LOC_UNCRTNTY_P (поля Location Uncertainty along Axis и Location Uncertainty Perpendicular to Axis (неопределенность определения местоположения вдоль оси и неопределенность определения местоположения перпендикулярно оси) в сообщении Provide Location Response (предоставить ответ, содержащий данные местоположения), определенном в IS-801-1) установлено в ответе в "11110" или "11111".
Количество неудачных измерений должно быть записано отдельно. Для того, чтобы пройти эту проверку, следует установить вероятность неудачных измерений меньше pf, или другими словами, выход больше 1-pf, с уровнем достоверности, по меньшей мере, 70%. Следует отметить, что относительно низкий уровень достоверности отражает практические пределы по количеству измерений. Для разных сценариев проверки могут быть указаны различные значения pf.
Минимальный стандарт для МС с возможностью расчета положения
Основная цель состоит в проверке выхода, точности и своевременности возвращаемых значений местоположения. Другие возвращенные значения также будут проверены, но требования к точности этих значений должны быть установлены существенно более низкими, поскольку информация, которую они передают, имеет меньшее значение. Следует отметить, что процедура оценки идентична в случаях GPS, AFLT или гибридных проверок, поскольку МС во всех случаях возвращает сообщения Provide Location Response (предоставить результат измерения местоположения).
LAT, LONG
Поскольку TIME_REF_МДКР и положение МС (в TIME_REF_МДКР) являются известными, можно непосредственно рассчитать истинное горизонтальное положение и, таким образом, вектор ошибки горизонтального положения. Игнорируют те измерения, для которых либо LOC_UNCRTNTY_A или LOC_UNCRTNTY_P были установлены либо в "11110" или "11111". Рассчитывают абсолютное значение вектора горизонтального положения для получения ошибки горизонтального позиционирования. Оценку группы ошибок горизонтального позиционирования производят с использованием проверки типа σ1, σ2.
LOC_UNCRTNTY_ANG, LOC_UNCRTNTY_A, LOC_UNCRTNTY_P
Значения возвращенных LOC_UNCRTNTY_ANG, LOC_UNCRTNTY_A и LOC_UNCRTNTY_P проверяют совместно, поскольку допустимая ошибка в LOC_UNCRTNTY_ANG существенно зависит от эксцентричности эллипса неопределенности. Чтобы показать это, рассмотрим случай, когда эксцентричность очень мала, при этом ошибка угла оси будет практически равномерно распределена по интервалу [0; π/2).
Для совместной проверки возвращаемых значений LOC_UNCRTNTY_ANG, LOC_UNCRTNTY_A и значения LOC_UNCRTNTY_P, рассчитывают следующие статистические параметры. Рассчитывают векторы ошибки горизонтального положения по отдельности. Игнорируют местоположения, для которых LOC_UNCRTNTY_A или LOC_UNCRTNTY_P установлены в "11110" или "11111". Используя значения LOC_UNCRTNTY_ANG, LOC_UNCRTNTY_A и LOC_UNCRTNTY_P, определяют эллипс неопределенности. Рассчитывают расстояние от геометрического центра эллипса до периметра эллипса вдоль направления, заданного вектором ошибки горизонтального положения. Полученное расстояние считается оценкой среднеквадратичного действующего значения (RMS) для МС. Рассчитывают величину вектора ошибки горизонтального положения для получения ошибки горизонтального позиционирования. Делят каждое значение ошибки горизонтального позиционирования на соответствующую оценку среднеквадратичного действующего значения (RMC) для получения zi', 1iN, где N представляет собой число возвращенных значений местоположения, для которых LOC_UNCRTNTY_A, LOC_UNCRTNTY_P", "11111".
Рассчитывают  . Для того, чтобы пройти эту проверку должно удовлетворяться ARB, где А и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения (RMC) условие Rолжно быть истинным, так что можно использовать, например, А=0,5 и В=2.
. Для того, чтобы пройти эту проверку должно удовлетворяться ARB, где А и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения (RMC) условие Rолжно быть истинным, так что можно использовать, например, А=0,5 и В=2.
HEIGHT
Учитывают только те местоположения, для которых HEIGHT_INCL установлено равным T. Поскольку TIME_REF_МДКР и положение МС (в TIME_REF_МДКР) известны, можно непосредственно рассчитать истинное вертикальное положение. Следует отметить, что для некоторых из предложенных сценариев проверки истинное вертикальное положение может быть постоянным. Ошибка может быть рассчитана как абсолютное значение разности между истинным вертикальным положением и возвращенным значением HEIGHT. Игнорируют те измерения, для которых LOC_UNCRTNTY_V было установлено в "11110" или в "11111". Оценку группы ошибок вертикального положения производят с использованием проверки типа σ1, σ2. Поскольку для МС не требуется возвращать значения высоты во всех измерениях, уровень достоверности может быть установлен 50%. Это означает, что эта оценка станет простой проверкой порогового значения ошибки CDF.
LOC_UNCRTNTY_V
Для проверки возвращенного значения LOC_UNCRTNTY_V следует рассчитать следующие статистические параметры. Используют отдельные значения ошибки вертикального позиционирования, рассчитанные в соответствии с приведенным выше описанием. Игнорируют значения, для которых LOC_UNCRTNTY_V установлено в "11110" или в "11111". Делят каждое остающееся значение ошибки на соответствующее значение среднеквадратичного действующего значения (RMC), представленного LOC_UNCRTNTY_V, для получения vi, 1iN, где N представляет собой количество возвращенных значений HEIGHT, для которых LOC_UNCRTNTY_V","11111".
Рассчитать  . Для того, чтобы пройти эту проверку, должно удовлетворяться условие ARB, где A и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения среднеквадратичного действующего значения (RMC), удовлетворяется условие Rак, что можно использовать, например, А=0,5 и В=2.
. Для того, чтобы пройти эту проверку, должно удовлетворяться условие ARB, где A и В представляют собой требуемые пороговые значения рабочих характеристик. При идеальной оценке среднеквадратичного действующего значения среднеквадратичного действующего значения (RMC), удовлетворяется условие Rак, что можно использовать, например, А=0,5 и В=2.
VELOCITY_HOR, HEADING
Значения возвращенных VELOCITY_HOR и HEADING проверяют совместно, поскольку допустимая ошибка в HEADING очень зависит от величины горизонтальной скорости. Это подтверждается тем, что для очень малой горизонтальной скорости ошибка направления практически равномерно распределена по интервалу [0; 2π).
Учитывают только те местоположения, для которых VELOCITY_INCL установлено в "1". Поскольку TIME_REF_МДКР и положение МС (TIME_REF_МДКР) известны, можно непосредственно рассчитать истинную горизонтальную скорость. Ошибку рассчитывают как величину разности между вектором истинной горизонтальной скорости и вектором горизонтальной скорости, полученным из HEADING и VELOCITY_HOR. Оценку группы ошибок горизонтальной скорости производят с использованием проверки типа σ1, σ2. Поскольку от МС не требуется возвращать значения горизонтальной скорости во всех измерениях, уровень достоверности может быть установлен 50%. Это означает, что оценка станет простой проверкой порогового значения по CDF ошибки.
VELOCITY_VER
Учитывают только те местоположения, для которых как FIX_TYPE, так и VELOCITY_INCL установлены в "1". Поскольку TIME_REF_МДКР и положение МС (в TIME_REF_МДКР) известны, можно непосредственно вычислить истинное значение вертикальной скорости. Следует отметить, что для некоторых из предложенных сценариев проверки истинная вертикальная скорость может быть всегда равна нулю. Ошибку рассчитывают как абсолютное значение разности между значением истинной вертикальной скорости и значением, представленным VELOCITY_VER. Оценку группы ошибки вертикальной скорости выполняют с использованием проверки типа σ1, σ2. Поскольку от МС не требуется возвращать значения вертикальной скорости во всех измерениях, уровень достоверности может быть установлен 50%. Это означает, что оценка станет простой проверкой порогового значения по CDF ошибки.
CLOCK_BIAS, CLOCK_DRIFT
Значения CLOCK_BIAS и CLOCK_DRIFT не проверяют, поскольку внутренний сигнал часов приемника GPS обычно недоступен.
Полные рабочие характеристики для МС с возможностью расчета положения
Полный отчет проверки включает следующие положения:
Расчетный выход.
Функция распределения кумулятивных вероятностей (CDF) времени ответа (измеренного от момента приема запроса МС до приема ответа БС).
CDF ошибки горизонтального позиционирования.
Значение R, рассчитанное на основе LOC_UNCRTNTY_ANG, LOC_UNCRTNTY_A и LOC_UNCRTNTY_P.
CDF ошибки вертикального позиционирования.
Значение R, рассчитанное на основе LOC_UNCRTNTY_V.
CDF ошибки горизонтальной скорости.
CDF ошибки вертикальной скорости.
Любые другие данные, собранные во время оценки, можно использовать при определении рабочих характеристик МС.
Сценарии проверки GPS
Сценарии проверки GPS разработаны для измерения рабочих характеристик МС в различных обстоятельствах. Установленная цель состоит в моделировании реальных сценариев; однако в случаях, когда определенные проверки, которые могли бы хорошо коррелировать с практическим сценарием, редко дают соответствующую информацию, эту проверку не следует использовать.
Случаи высокого значения отношения сигнал/шум (ОСШ) моделируют условия внешней окружающей среды, и они позволяют проверять динамическое поведение МС. Случаи с низким значением ОСШ моделируют среду в хорошо экранированном помещении, и с их использованием проверяют чувствительность приемника МС. Случаи смешанных значений ОСШ моделируют среду в помещении, и с их использованием проверяют линейность МС, а также ее способность подавления поперечной корреляции.
С помощью неподвижного и подвижного сценарии одновременно проверяют интерпретацию доплеровского смещения спутника и, возможно, точность расчета скорости. Для подвижного сценария выбирают круговую траекторию с центром в обслуживающей БС, так что задержку на прохождение сигнала в прямом и обратном направлении (RTD) можно считать постоянным значением.
Неуказанные значения, такие как точное значение отношения сигнал/шум (ОСШ) для различных случаев, определяют на основе предпочтительных требований рабочих характеристик МС. Например, высокие уровни ОСШ могут быть установлены на значении -130 дБм, в то время как низкие уровни ОСШ могут быть установлены на значении -150 дБм.
Следует различать два приведенных ниже случая.
МС без возможности расчета местоположения.
МС с возможностью расчета местоположения.
Устанавливаемые параметры, если это применимо, всегда следует выбирать одинаковыми для обоих случаев.
Следует отметить, что сценарии проверки для случаев AFLT и гибридных случаев могут быть определены аналогично. Во всех случаях отношение сигнал/шум (ОСШ) для сигналов обслуживающей базовой станции следует устанавливать на достаточно высоком уровне для обеспечения передачи без ошибок данных определения местоположения между имитатором БС и МС.
Сценарии проверки GPS для МС без возможности расчета положения
На фигуре 7 показана таблица, в которой представлены сценарии проверки для мобильной станции без возможности расчета положения. На фигуре 7 ячейка, отмеченная знаком "X", показывает, что соответствующая проверка должна быть выполнена.
Следует отметить, что проверка для случаев многоканального распространения должна составлять часть минимальной проверки рабочих характеристик ООМ.
Сценарии проверки GPS для МС с возможностью расчета положения
На фигуре 8 показана таблица, в которой представлен сценарий проверки для мобильной станции с возможностью расчета положения. На фигуре 8 ячейка, отмеченная знаком "X", показывает, что соответствующая проверка должна быть выполнена.
Следует отметить, что все представленные значения ГСМП являются приблизительными и их не устанавливают во время проверки. Их контролируют опосредованно, путем установки других параметров.
В вышеприведенном описании подробно описаны определенные варианты выполнения настоящего изобретения. Однако следует понимать, что независимо от степени подробности приведенного выше описания, настоящее изобретение может быть выполнено в других конкретных формах, без отхода от его сущности или существенных характеристик. Описанные выше варианты выполнения во всех отношениях следует рассматривать только как иллюстрацию, а не как ограничение объема настоящего изобретения, поэтому он определяется скорее приложенной формулой изобретения, а не вышеприведенным описанием. Все изменения, которые находятся в пределах значений и диапазона эквивалентности формулы изобретения, охватываются ее объемом.
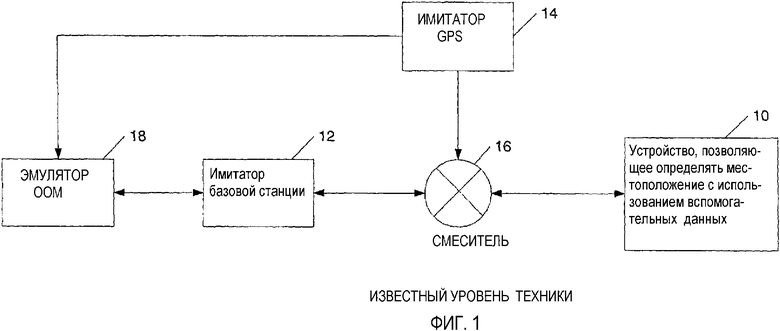
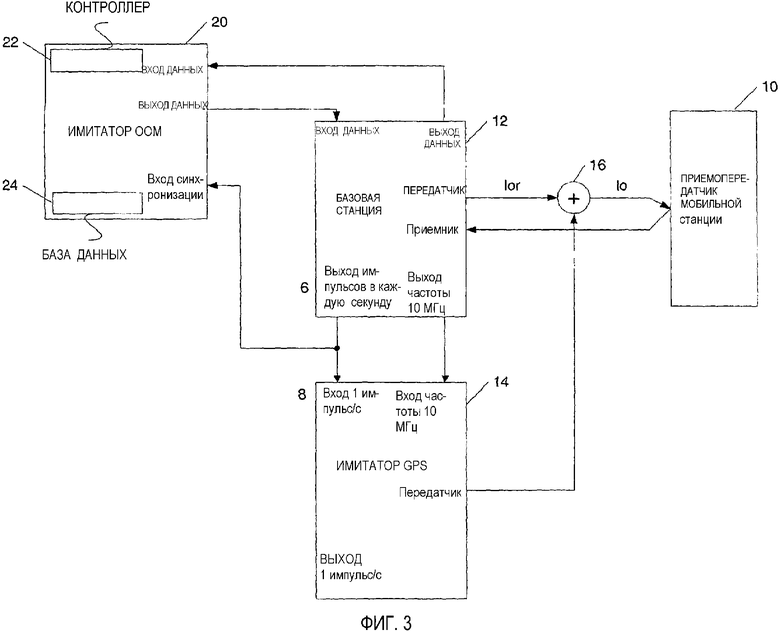
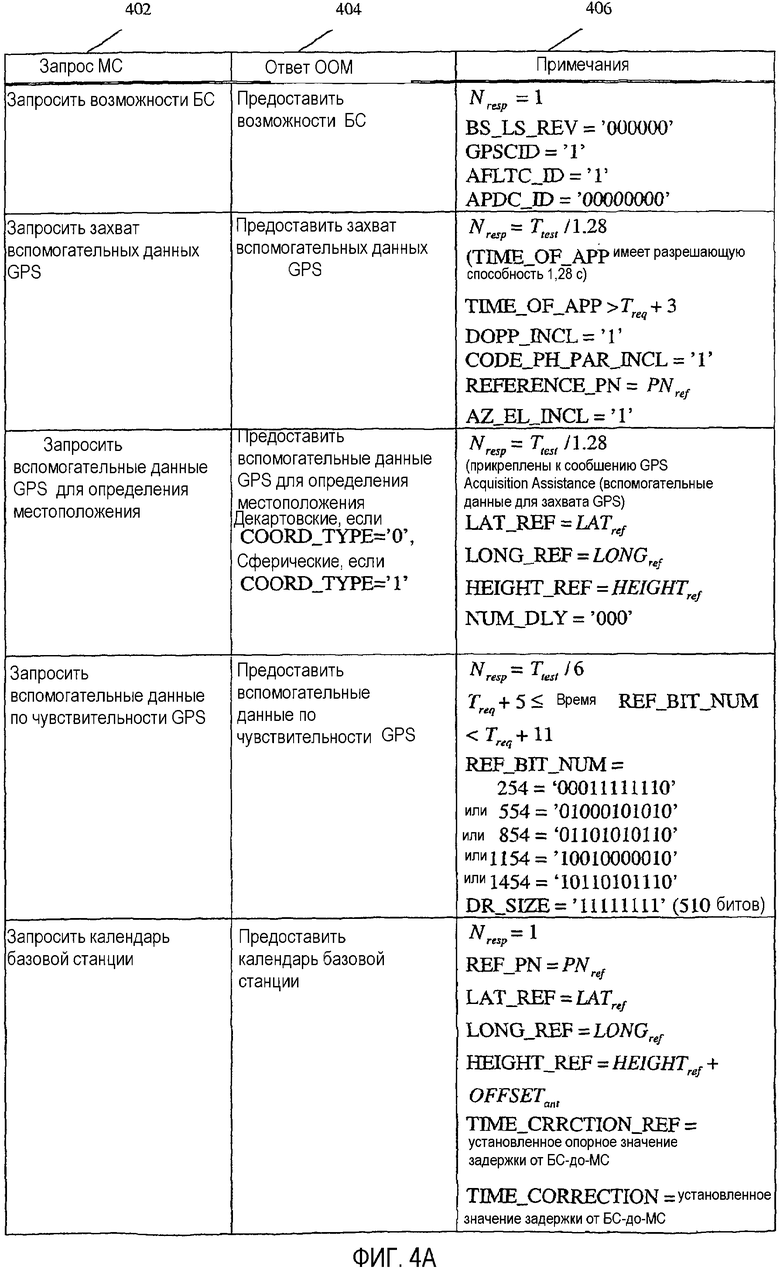
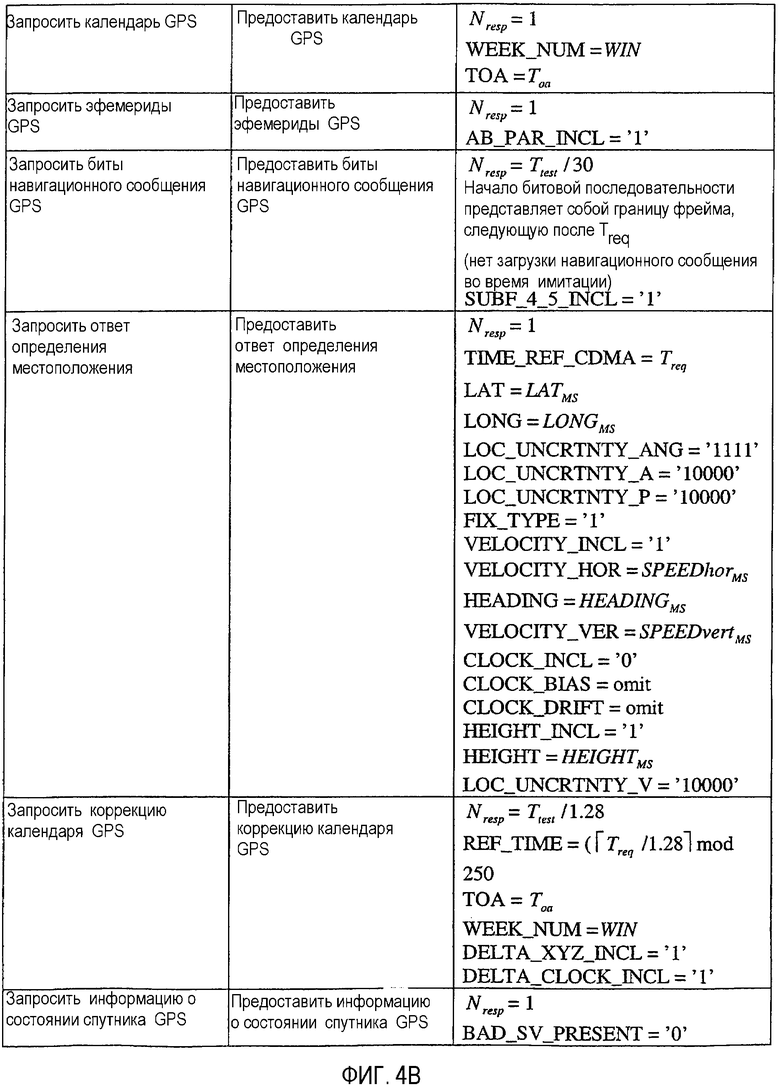
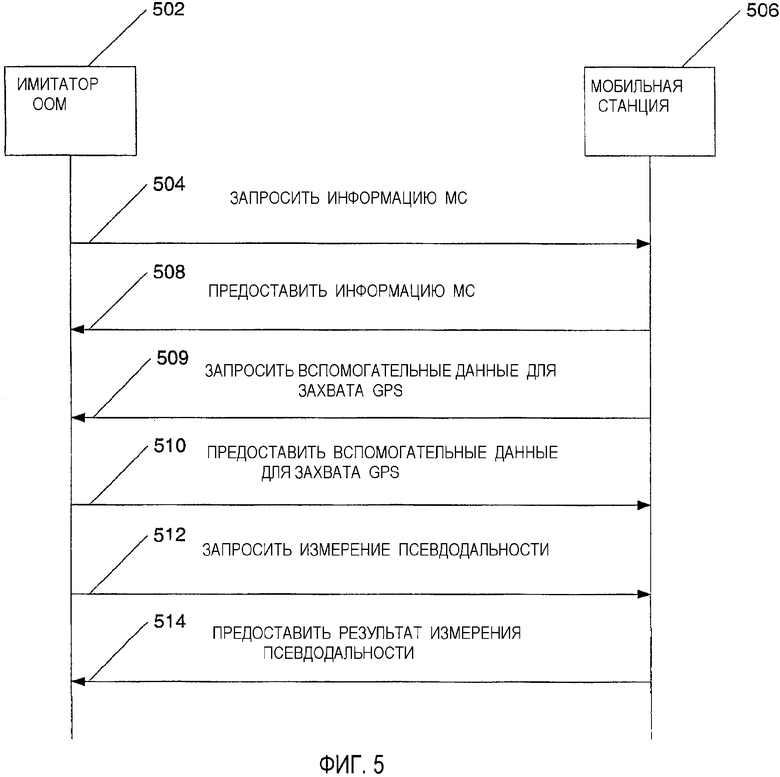
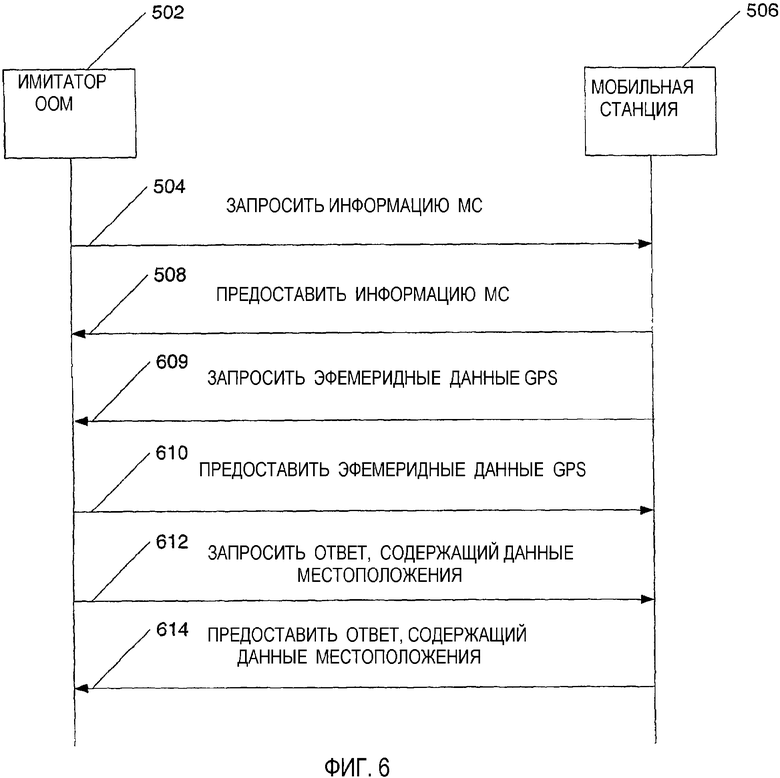
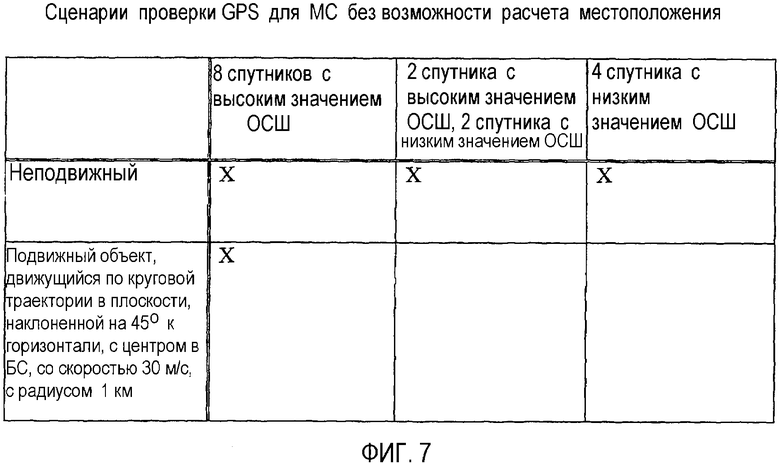
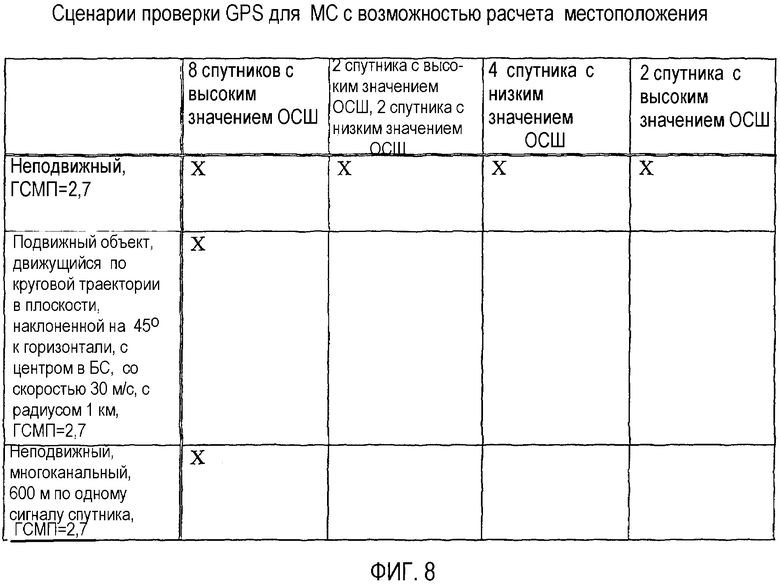
Изобретение относится к области связи. Заявленные способ и устройство предназначены для проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, которые включают использование имитатора объекта определения местоположения, связанного с имитатором базовой станции, и подключение проверяемого устройства, позволяющего определять местоположение с использованием вспомогательных данных, к имитатору базовой станции и к имитатору глобальной системы позиционирования. Технический результат заключается в упрощении проверки рабочих характеристик мобильного модуля при захвате данных GPS для оценки местоположения мобильного модуля. 5 н. и 3 з.п. ф-лы, 8 ил.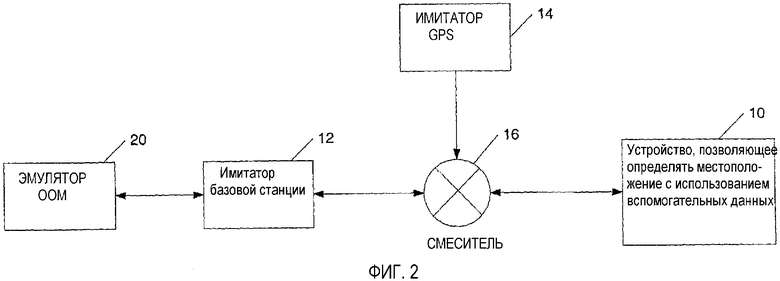
подключают проверяемое устройство (ПРУ), позволяющее определять местоположение с использованием вспомогательных данных, к имитатору базовой станции и к имитатору глобальной системы позиционирования (GPS) и
инициируют проверочную последовательность, в которой ПРУ принимает набор заранее определенных сигналов GPS, и в заданное время проверочной последовательности ПРУ запрашивает вспомогательные данные от имитатора базовой станции, и имитатор базовой станции запрашивает вспомогательные данные от имитатора ООМ, причем имитатор ООМ обеспечивает данные, сформированные в соответствии с типом запроса ПРУ и временем, прошедшим между временем инициирования проверочной последовательности и заданным временем проверочной последовательности, и полученные независимо от данных имитатора GPS, в базовую станцию, и при этом базовая станция передает данные ООМ в ПРУ.
подключают проверяемое устройство (ПРУ), позволяющее определять местоположение с использованием вспомогательных данных, к имитатору базовой станции и к имитатору глобальной системы позиционирования (GPS) и
инициируют проверочную последовательность, в которой имитатор ООМ обеспечивает вспомогательные данные захвата, сформированные в соответствии с временем, прошедшим между временем инициирования проверочной последовательности и заданным временем проверочной последовательности, и независимо от имитатора GPS, и выполняет запрос в ПРУ на проведение измерений псевдодальности, и ПРУ принимает вспомогательные данные и запрос и, используя вспомогательные данные, проводит измерение псевдодальности и обеспечивает результаты измерения псевдодальности в имитатор базовой станции.
подключают проверяемое устройство (ПРУ), позволяющее определять местоположение с использованием вспомогательных данных, к имитатору базовой станции и к имитатору глобальной системы позиционирования (GPS) и
инициируют проверочную последовательность, в которой имитатор ООМ обеспечивает вспомогательные данные захвата, сформированные в соответствии с временем, прошедшим между временем инициирования проверочной последовательности и заданным временем проверочной последовательности, и независимо от имитатора GPS, и выполняет запрос в ПРУ на формирование запроса на определение местоположения, и ПРУ принимает вспомогательные данные и запрос и, используя вспомогательные данные, проводит измерение местоположения и обеспечивает результаты измерения местоположения в имитатор базовой станции.
средство, используемое в качестве имитатора объекта определения местоположения (ООМ), который находится на связи с имитатором базовой станции, имитирующим, по меньшей мере, одну базовую станцию, проверяемое устройство (ПРУ), позволяющее определять местоположение с использованием вспомогательных данных, подключенное к имитатору базовой станции и к имитатору глобальной системы позиционирования (GPS) и
средство для инициирования проверочной последовательности, в которой ПРУ принимает набор заранее определенных сигналов GPS, и в заданное время ПРУ запрашивает вспомогательные данные от имитатора базовой станции, и имитатор базовой станции запрашивает вспомогательные данные от имитатора ООМ, причем имитатор ООМ обеспечивает данные, независимые от данных имитатора GPS, в базовую станцию, и базовая станция передает данные ООМ в ПРУ.
средство, используемое в качестве имитатора объекта определения местоположения (ООМ), который находится на связи с имитатором базовой станции, имитирующим, по меньшей мере, одну базовую станцию, проверяемое устройство (ПРУ), позволяющее определять местоположение с использованием вспомогательных данных, подключенное к имитатору базовой станции и к имитатору глобальной системы позиционирования (GPS) и
средство для инициирования проверочной последовательности, в которой имитатор ООМ формирует вспомогательные данные захвата и выполняет запрос в ПРУ на проведение измерений псевдодальности, и ПРУ принимает вспомогательные данные и запрос, и, используя вспомогательные данные, проводит измерение псевдодальности и обеспечивает результаты измерения псевдодальности в имитатор базовой станции.
| US 5841396 А, 24.11.2998 | |||
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| US 6208289 B1, 27.03.2001 | |||
| JP 11304900, 05.11.1999. | |||

