Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к определению местоположения. Более конкретно, настоящее изобретение относится к способам повышения точности и повышения доступности сервиса при определении местоположения оконечного устройства беспроводной связи.
Уровень техники
Часто представляется желательным, а иногда просто необходимо знать местоположение пользователя беспроводного устройства связи. Например, Федеральная комиссия США по связи утвердила доклад и инструкцию об усовершенствованной услуге беспроводной связи по номеру 911 (Е 911), которые требуют, чтобы данные о местоположении оконечного устройства беспроводной связи (например, сотового телефона) передавались в Пункт ответа на звонки, связанные с общественной безопасностью, всякий раз, когда с этого оконечного устройства беспроводной связи делается звонок по номеру 911. Предписание Федеральной комиссии по связи требует, чтобы точность определения местоположении оконечного устройства соответствовала определенным нормативам, то есть лежала в пределах до 50 метров для 67% звонков и в пределах до 150 метров для 95% звонков.
В дополнение к предписанию Федеральной комиссии по связи провайдеры услуг беспроводной связи начали осознавать, что услуги по определению местоположения (то есть услуги по установлению местоположения оконечного устройства беспроводной связи) могут быть использованы в разнообразных приложениях как элементы добавленной потребительской ценности, которые могут принести провайдерам этих услуг дополнительный доход. Например, провайдер услуг беспроводной связи может использовать услуги по определению местоположения для внедрения системы расчетов, учитывающей местоположение абонента, в которой плата за звонки, сделанные из разных зон, может определяться по различным ставкам. Провайдер услуг беспроводной связи может также использовать услуги по определению местоположения для предоставления информации, учитывающей местоположение абонента, такой как указания водителям, местная информация о дорожном движении, бензозаправочных станциях, ресторанах, гостиницах и тому подобная информация. Другие варианты применения, которые могут быть предложены на основе использования услуг по определению местоположения, включают в себя услуги по слежению за имущественными объектами, услуги по мониторингу и возврату имущественных объектов, управление парком транспортных средств и ресурсами, услуги по определению местонахождения лиц и тому подобные услуги. Эти разнообразные варианты применения обычно требуют, чтобы система контролировала местоположение каждого задействованного оконечного устройства или чтобы это оконечное устройство было способно постоянно обновлять данные о своем местоположении.
Для определения местоположения оконечного устройства беспроводной связи могут использоваться разнообразные системы. Одной из таких систем является хорошо известная Глобальная навигационная система (GPS), которая представляет собой «созвездие» из 24 упорядоченно расположенных относительно друг друга спутников, обращающихся по орбитам вокруг Земли. Каждый спутник системы GPS передает сигналы, в которых закодирована информация, позволяющая приемникам на Земле измерить время поступления принятых сигналов относительно некоторого произвольного момента времени. Это измерение относительного времени поступления сигнала может затем быть преобразовано в «псевдодальность». Местоположение приемника системы GPS может быть оценено с высокой точностью (в интервале от 10 до 100 метров для большинства приемников системы GPS) на основе достаточного количества измерений псевдодальностей (обычно четырех). Однако сигналы системы GPS принимаются с очень низкими уровнями мощности, что вызвано относительно большими расстояниями между спутниками и приемниками, и у большинства приемников системы GPS возникают серьезные трудности с приемом сигналов системы GPS внутри зданий, за густой листвой, в городском окружении, в котором высокие здания закрывают большую часть неба, и в других подобных местах.
В смешанной системе определения местоположения вместо или в дополнение к сигналам, поступающим от спутников системы GPS, для определения местоположения устройства беспроводной связи могут также использоваться сигналы с наземных или связанных с Землей базовых станций систем беспроводной связи. Система беспроводной связи может представлять собой систему сотовой связи или какую-либо другую систему. «Смешанное» оконечное устройство в этом случае включало бы в себя приемник системы GPS для приема сигналов системы GPS, поступающих от спутников, и приемник «наземной» системы для приема «наземных» сигналов, поступающих от связанных с Землей базовых станций. По аналогии с сигналами системы GPS время поступления принятого наземного сигнала может быть измерено относительно некоторого произвольного момента времени и преобразовано в псевдодальность. Измерения псевдодальностей до достаточного количества базовых станций (например, трех или более) могут затем быть использованы для оценки местоположения оконечного устройства. Хорошо известен тот факт, что измерения псевдодальностей в наземной системе, основанные на наземных сигналах, склонны демонстрировать относительно большие ошибки, что вызвано погрешностями синхронизации и аппаратными погрешностями в базовых станциях, погрешностями синхронизации и аппаратными погрешностями в приемнике и погрешностями, связанными с траекторией распространения сигнала. В результате, точность оценки местоположения, полученной на основе измерений псевдодальностей в наземной системе, обычно ниже, чем точность оценки местоположения, полученной на основе измерений псевдодальностей в системе GPS.
Мобильное оконечное устройство может входить и выходить из зоны обслуживания системы GPS и системы беспроводной связи. Для достижения высокой точности желательно использовать для определения оценки местоположения сигналы системы GPS так часто, как это возможно, и в той мере, в какой это возможно. Кроме того, для достижения более высокой доступности и более широкой зоны обслуживания желательно использовать для определения оценки местоположения оконечного устройства наземные сигналы в тех случаях, когда это необходимо, и в той мере, в какой это необходимо.
Следовательно, в данной области техники существует потребность в способах эффективного использования сигналов системы GPS и наземных сигналов, обеспечивающих высокую точность и высокую доступность при определении оценки местоположения оконечного устройства беспроводной связи.
Раскрытие изобретения
В данном описании рассмотрены способы повышения точности и доступности сервиса при определении оценки местоположения оконечного устройства беспроводной связи. В одном аспекте данного изобретения местоположение оконечного устройства сначала определяется с высокой точностью на основе подсистемы точного определения местоположения (которая может быть системой GPS). Эта точная оценка местоположения затем используется для нахождения «разностных поправок», представляющих собой поправки, которые предназначены для применения к «фактическим» измерениям, получаемым в менее точной подсистеме определения местоположения (которая может быть системой сотовой связи). После этого местоположение оконечного устройства может быть определено на основе самого лучшего набора измерений, имеющихся на тот момент для данного оконечного устройства. Например, если доступны измерения по достаточному количеству спутников, то может быть вычислено решение, «основанное на системе GPS», если доступно измерение, по меньшей мере, по одному спутнику системы GPS, то может быть вычислено «смешанное» решение, а если доступны измерения только по базовым станциям, то может быть вычислено решение, «основанное на наземной системе».
Для смешанного решения и решения, основанного на наземной системе, фактическое измерение по каждой базовой станции (которое может представлять собой «измеренную» псевдодальность, полученную на основе сигнала, принятого от данной базовой станции) может быть скорректировано с использованием разностной поправки, определенной для этой базовой станции. Разностные поправки могут использоваться для того, чтобы уменьшить погрешности, которые вносятся различными компонентами беспроводной сети и средой распространения сигнала. Таким образом, может быть достигнута наивысшая возможная точность оценки местоположения оконечного устройства на основе доступной подсистемы (подсистем) определения местоположения. Кроме того, обеспечивается и высокая доступность определения местоположения в силу возможности дополнять более точные измерения (в системе GPS) менее точными (наземными) измерениями тогда, когда это необходимо, и в той мере, в какой это необходимо.
В одном конкретном варианте осуществления изобретения предлагается способ для определения оценки местоположения оконечного устройства беспроводной связи. В соответствии с этим способом сначала на основе первой (точной) подсистемы определения местоположения (например, на основе измеренных псевдодальностей до достаточного количества спутников системы GPS) определяется точная оценка местоположения оконечного устройства. Затем на основе точной оценки местоположения оконечного устройства и известного места расположения передатчика вычисляется «ожидаемое» значение псевдодальности до каждого из одного или более передатчиков во второй (менее точной) подсистеме определения местоположения (например, до одной или более базовых станций в системе сотовой связи). Ожидаемое значение псевдодальности показывает расстояние по линии прямой видимости между оконечным устройством и передатчиком и может рассматриваться как «истинное» значение дальности. Также получают измеренную псевдодальность по каждой базовой станции (например, на основе измерения фазы пилот-сигнала в сигнале прямого направления, принятого от базовой станции, в случае беспроводной сети, основанной на использовании протокола CDMA (Множественного доступа с кодовым разделением каналов)). После этого для каждой базовой станции на основе ожидаемого значения псевдодальности и измеренной псевдодальности для этой базовой станции определяют разностную поправку псевдодальности. Предполагается, что разностная поправка обусловлена погрешностями измерения, произведенного менее точной второй подсистемой.
После этого для определения уточненной оценки местоположения оконечного устройства получают измеренные псевдодальности для достаточного количества передатчиков, каждый из которых может быть спутником системы GPS или базовой станцией. Затем измеренную псевдодальность для каждой базовой станции корректируют на основе разностной поправки псевдодальности, определенной для этой базовой станции. После этого на основе (1) измеренных псевдодальностей (если таковые имеются) для спутников системы GPS и (2) скорректированных псевдодальностей для базовых станций определяют уточненную оценку местоположения оконечного устройства.
В одном варианте осуществления изобретения уточненную оценку местоположения оконечного устройства определяют на основе (1) первой подсистемы, если она доступна, (2) первой и второй подсистем, если первая подсистема доступна частично, или (3) только второй подсистемы, если первая подсистема не доступна.
Краткое описание чертежей
Характерные особенности, сущность и преимущества настоящего изобретения станут более понятны из подробного описания, приводимого ниже, при рассмотрении его в связи с чертежами, где одинаковые ссылочные позиции идентифицируют соответствующие элементы на всех чертежах и где:
Фиг.1 - схема смешанной системы определения местоположения, которая включает в себя ряд подсистем определения местоположения;
Фиг.2 - блок-схема алгоритма способа определения разностных поправок псевдодальностей для базовых станций, входящих в состав системы сотовой связи;
Фиг.3 - блок-схема алгоритма способа, предназначенного для определения оценки местоположения оконечного устройства беспроводной связи и обеспечивающего достижение высокой точности и высокой доступности сервиса;
Фиг.4 - блок-схема алгоритма способа, предназначенного для определения оценки местоположения оконечного устройства и использующего для обеспечения повышенной точности разностные поправки псевдодальностей; и
Фиг.5 - структурная схема варианта исполнения приемного устройства, которое может являться компонентом оконечного устройства беспроводной связи.
Осуществление изобретения
Фиг.1 представляет собой схему смешанной системы 100 определения местоположения, которая включает в себя ряд подсистем определения местоположения. Одной такой подсистемой определения местоположения является хорошо известная Глобальная навигационная система (GPS). Другой такой подсистемой определения местоположения является система беспроводной (например, сотовой) связи, которая может быть системой связи, использующей протокол Множественного доступа с кодовым разделением каналов (CDMA), или какой-либо другой системой. Вообще, смешанная система 100 определения местоположения может включать в себя любое количество подсистем определения местоположения, которые могут относиться к системам любого типа (например, к системам Bluetooth, WI-FI или к любой другой системе, способной предоставлять информацию, связанную с местоопределением). В конкретном варианте осуществления изобретения, который подробно описан ниже, смешанная система 100 определения местоположения включает в себя систему GPS и систему сотовой связи.
В смешанной системе 100 определения местоположения местоположение оконечного устройства 110 беспроводной связи может быть определено на основе сигналов либо от одной подсистемы определения местоположения, либо от многих подсистем определения местоположения. Например, если система 100 включает в себя систему GPS и систему сотовой связи, то местоположение оконечного устройства 110 может быть определено на основе (1) одной лишь системы GPS, (2) одной лишь системы сотовой связи с использованием технологии, известной как Усовершенствованная трилатерация по сигналу прямого направлении (A-FLT), или (3) обеих систем: и GPS, и системы сотовой связи. Каждая подсистема определения местоположения может быть способна давать оценки местоположения с определенной точностью и может быть доступна в определенных условиях работы. Для системы 100, если она включает в себя систему GPS и систему сотовой связи, точность и доступность этих систем может быть кратко резюмирована (в порядке убывания точности) в виде, показанном в Таблице 1.
Хотя в Таблице 1 решение, «основанное на системе GPS», имеет самую высокую точность, при некоторых условиях работы (например, внутри зданий) для вычисления данного решения может быть доступно недостаточное количество спутников системы GPS. Для повышения чувствительности и сокращения времени, необходимого для захвата сигнала со спутников, может быть реализован вариант поддерживаемой системы GPS. В случае поддерживаемой системы GPS определенная вспомогательная информация может предоставляться оконечному устройству и использоваться им для захвата и обработки сигналов системы GPS. Эта вспомогательная информация может включать в себя, например, синхронизирующую информацию, информацию, касающуюся приблизительного местонахождения спутников системы GPS, и информацию, подобную этой.
Для получения «смешанного» решения, основанного на измерениях как в системе GPS, так и в системе сотовой связи, вместо измерений по спутникам системы GPS могут использоваться измерения по одной или более базовым станциям. Смешанное решение обеспечивает наивысшую достижимую точность в случаях, когда для вычисления решения, основанного на системе GPS, доступно недостаточное количество спутников системы GPS. Для «основанного на наземной системе» или «свободного» решения (например, использующего способ A-FLT) не используется никаких измерений по спутникам системы GPS, а местоположение оконечного устройства определяется исключительно на основе измерений по базовым станциям системы сотовой связи. В случае смешанных решений и решений, основанных на наземной системе, фактические измерения, основанные на сигналах, принятых с базовых станций, склонны демонстрировать относительно большие погрешности, что вызвано (1) погрешностями синхронизации и аппаратными погрешностями в оконечном устройстве и базовых станциях и (2) погрешностями, вызванными средой распространения сигнала. Следовательно, точность решения, основанного на наземной системе, обычно ниже, чем точность смешанного решения, которая обычно ниже, чем точность решения, основанного на системе GPS.
В данном описании предлагаются способы повышения точности и доступности сервиса при определении оценки местоположения оконечного устройства беспроводной связи. В одном аспекте данного изобретения местоположение оконечного устройства сначала определяют с высокой точностью на основе подсистемы точного определения местоположения (например, системы GPS) и используют для нахождения «разностных поправок», представляющих собой поправки, которые предназначены для применения к фактическим измерениям, получаемым в менее точной подсистеме определения местоположения (например, в системе сотовой связи). После этого местоположение оконечного устройства может определяться на основе самого лучшего набора измерений, имеющихся на тот момент для данного оконечного устройства. Например, если доступны измерения по достаточному количеству спутников, то может быть вычислено решение, «основанное на системе GPS», если доступно измерение, по меньшей мере, по одному спутнику, то может быть вычислено «смешанное» решение, а если доступны измерения только по базовым станциям, то может быть вычислено решение, «основанное на наземной системе».
Для смешанного решения и решения, основанного на наземной системе, действительное измерение по каждой базовой станции может быть скорректировано с использованием разностной поправки, определенной для этой базовой станции. Разностные поправки могут использоваться для того, чтобы уменьшить погрешности, которые вносятся различными компонентами беспроводной сети и средой распространения сигнала. Таким образом, может быть достигнута наивысшая возможная точность оценки местоположения оконечного устройства на основе доступной подсистемы (доступных подсистем) определения местоположения. Кроме того, обеспечивается и высокая доступность определения местоположения с возможностью дополнять более точные измерения (в системе GPS) менее точными измерениями (на основе сотовой системы) тогда, когда это необходимо, и в той мере, в какой это необходимо.
Для простоты изложения различные аспекты и варианты осуществления изобретения будут конкретно описаны для измерений, касающихся псевдодальностей. Как известно в данной области техники, псевдодальность до базовой станции может быть измерена на основе измерения фазы пилот-сигнала. Известны и могут также быть использованы и другие средства измерений псевдодальностей. Как бы там ни было, способы, описанные в данном документе, могут также использоваться и для других типов измерений, помимо измерений псевдодальностей. Например, для определения оценки местоположения оконечного устройства могут быть получены и использованы измерения, связанные с временными характеристиками и/или уровнем сигнала. Известны и другие способы определения местоположения, не использующие псевдодальности. Таким образом, способы, описанные в данном документе, могут быть использованы для различных типов разностных поправок и измерений.
Как показано на Фиг.1, оконечное устройство 110 принимает сигналы, переданные из ряда передатчиков, которые могут представлять собой базовые станции 120 системы сотовой связи и/или спутники 130 Глобальной навигационной системы. В общем, для определения местоположения оконечного устройства может быть использован любой тип передатчика, имеющего местонахождение, которое известно или может быть установлено. Например, оконечное устройство 110 может принимать сигнал из точки доступа системы Bluetooth. Базовая станция, в том значении, в котором этот термин используется в данном документе, может представлять собой любой наземный передатчик, передающий сигнал, который может быть использован для определения местоположения.
Оконечное устройство 110 может представлять собой любое устройство, способное принимать и обрабатывать сигналы от подсистем определения местоположения с целью получения информации о времени, дальности и/или местоположении. В одном варианте осуществления изобретения оконечное устройство 110 представляет собой сотовый телефон, способный принимать сигналы от нескольких передатчиков. В других вариантах осуществления изобретения оконечное устройство 110 может представлять собой электронное устройство (например, компьютерный терминал, персональный цифровой секретарь (ПЦС) и подобные им устройства), имеющее модем беспроводной связи, приемное устройство, способное принимать сигналы от спутников и/или базовых станций или любой другой тип приемника.
Местоположение оконечного устройства 110 может быть определено на основе (1) расстояний до достаточного количества передатчиков, которые используются в качестве опорных точек, и/или (2) данных о местонахождение этих передатчиков. (Данных о местонахождении передатчика системы Bluetooth или ретранслятора системы сотовой связи может быть достаточно). Оконечное устройство может оценивать расстояние до каждого передатчика, измеряя время, которое требуется сигналу для прохождения от передатчика до оконечного устройства. Если момент времени передачи сигнала передатчиком известен (например, задан меткой или закодирован в сигнале), то время прохождения сигнала может быть установлено путем определения момента времени, в который сигнал принят в оконечном устройстве (на основе внутренней шкалы времени оконечного устройства). В большинстве случаев, однако, интервал времени, прошедший между передачей и приемом, не может быть точно определен по причине сдвигов между шкалами времени в передатчике и в оконечном устройстве. Поэтому обычно определяется псевдодальность, основанная на разнице между некоторым опорным моментом времени и моментом времени, в который принят сигнал. Псевдодальность, таким образом, представляет собой относительное расстояние между оконечным устройством и передатчиком, от которого был принят сигнал.
Местонахождение спутников системы GPS может быть установлено посредством обработки сигналов, переданных спутниками. Каждый спутник передает информацию, именуемую «Альманах», которая содержит информацию по грубо заданному местонахождению всех спутников в созвездии. Каждый спутник далее передает «эфемеридную» информацию, которая содержит более точное значение его собственной орбиты согласно тому, как она отслежена и сообщена спутнику станциями слежения, расположенными на Земле. Местонахождение базовых станций может быть сообщено (например, посредством сообщений) устройству, осуществляющему определение местоположения. Например, оконечное устройство может содержать базу данных местонахождения базовых станций и/или спутников или данные об их местонахождении могут предоставляться ему Сервером местоопределения, таким как устройством 140 определения местоположения (УОМ), или базовой станцией в зависимости от того, что требуется. В качестве альтернативы, определение местоположения оконечного устройства могут производить базовая станция или устройство определения местоположения, и они же могут иметь информацию, касающуюся местонахождения спутников и/или базовых станций. Информация, касающаяся местонахождения спутников и/или базовых станций, может быть также передана посредством сообщений.
Измерения псевдодальностей до достаточного количества передатчиков (базовых станций и/или спутников) и данные о местонахождении этих передатчиков обычно вводятся в некоторый алгоритм, который затем на основе этой информации, используя способ трилатерации, производит вычисление оценки местоположения оконечного устройства. Одним таким алгоритмом является хорошо известный алгоритм наименьших средних квадратов (НСК). Также могут использоваться другие подходящие алгоритмы, которые известны в данной области техники. Вычисление, имеющее своей целью определить оценку местоположения оконечного устройства, может производиться оконечным устройством, устройством определения местоположения (Сервером местоопределения), базовой станцией или каким-либо другим устройством. Устройству, осуществляющему определение местоположения, предоставляется необходимая информация (например, соответствующие измерения и либо данные о местонахождении передатчиков, либо средства для определения этих данных).
Как упоминалось выше, местоположение оконечного устройства 110 может быть определено на основе сигналов только из системы GPS, только из системы сотовой связи или из обеих систем. Для получения решения, основанного на системе GPS, определяются измерения псевдодальностей до четырех или более спутников 130 системы GPS, и эти измерения используются для нахождения четырех неизвестных, к которым относятся координаты местоположения x, y, z и сдвиг или смещение шкалы времени оконечного устройства. Результатом вычислений является точная трехмерная оценка местоположения (x, y, z) оконечного устройства.
Для получения смешанного решения, основанного на сигналах как из системы GPS, так и из системы сотовой связи, вместо измерений от спутников системы GPS могут быть использованы одно или более измерений от одной или более базовых станций. Например, согласно Фиг.1 сигнал от базовой станции 120а системы сотовой связи может быть использован для коррекции сдвига шкалы времени оконечного устройства. В системах, основанных на использовании протокола CDMA (Множественного доступа с кодовым разделением каналов), каждая базовая станция передает всем оконечным устройствам, находящимся в пределах зоны ее обслуживания, пилот-сигнал на своем сигнале прямого направления. Во многих системах, основанных на использовании протокола CDMA, хронирование пилот-сигналов от всех базовых станций синхронизировано с системным временем системы GPS. В оконечном устройстве 110 определяется самый ранний поступивший экземпляр сигнала (или компонент сигнала многолучевого распространения), который будет использован для демодуляции, определяется время возникновения этого компонента сигнала многолучевого распространения в соединителе антенны оконечного устройства, и это время возникновения может быть использовано в качестве опорного момента отсчета времени оконечного устройства. После этого оконечное устройство может передать назад той же самой базовой станции 120а сигнал обратного направления, так что сигнал обратного направления запаздывает в сумме на величину 2τ, которая именуется задержкой на прохождение сигнала в прямом и обратном направлениях (RTD). Задержка RTD может быть измерена в базовой станции 120а и использована для корректировки опорного момента отсчета времени оконечного устройства с тем, чтобы оно соответствовало «истинному» времени системы GPS. Синхронизировав шкалу времени оконечного устройства со временем системы GPS, можно устранить сдвиг шкалы времени в оконечном устройстве. Смешанное решение может затем быть получено при помощи только трех измерений псевдодальностей RS1, RS2 и RS3 по трем спутникам системы GPS: 130а, 130b и 130c соответственно, и это все, что необходимо для нахождения трех неизвестных (то есть, координат местоположения x, y, z) и получения трехмерной оценки местоположения оконечного устройства. Если также имеются вспомогательные условия по высоте, то для нахождения оценки местоположения было бы достаточно измерений псевдодальностей до двух спутников.
Сигналы с базовых станций также могут быть использованы для определения дальности, что дополнительно сокращает количество спутников, необходимых для определения местоположения оконечного устройства. В частности, псевдодальность от оконечного устройства до базовой станции i может быть рассчитана, как:
где с - скорость света, а τi - задержка на прохождение сигналом расстояния от оконечного устройства до базовой станции i (то есть τi = RTD/2).
Измерения псевдодальностей по базовым станциям могут сочетаться с измерением псевдодальностей по спутникам системы GPS и использоваться для вычисления оценки местоположения оконечного устройства. Смешанное решение может быть получено в случаях: (1) двух измерений псевдодальностей (например, RS1 иRS2) по двум спутникам системы GPS и одного измерения псевдодальности (например, RB1) по одной базовой станции, (2) одного измерения псевдодальности (например, RS1) по одному спутнику системы GPS и двух измерений псевдодальностей (например, RB1 и RB2) по двум базовым станциям и так далее. Решение на основе наземной системы также может быть получено при помощи двух или более измерений псевдодальностей (например, RB1 и RB2) по двум или более базовым станциям. В общем, для определения оценки местоположения оконечного устройства может использоваться достаточное количество измерений, полученных от сочетания базовых станций и/или спутников системы GPS.
Как было отмечено выше, измерения псевдодальностей, основанные на использовании сигналов от базовых станций, склонны демонстрировать относительно большие погрешности, что связано с различными источниками происхождения погрешностей. Одним таким источником происхождения погрешности является эффект многолучевого распространения в среде распространения сигнала, который приводит к тому, что сигнал, переданный с базовой станции, достигает оконечного устройства по непрямой траектории вместо траектории вдоль линии прямой видимости. Непрямая траектория может быть обусловлена отражением от одного или более источников отражений, каковыми обычно являются созданные человеком объекты, расположенные в среде, в которой функционирует оконечное устройство (например, здания, деревья или какие-либо другие объекты). Поскольку непрямая траектория длиннее, чем траектория вдоль линии прямой видимости, измерение псевдодальности, основанное на отраженном сигнале, будет соответственно иметь большую длину. В одном варианте осуществления изобретения для каждой базовой станции, с которой поддерживает связь оконечное устройство, определяется разностная поправка псевдодальности. В другом варианте осуществления изобретения разностная поправка псевдодальности определяется для каждой базовой станции, которая может быть использована для определения оценки местоположения оконечного устройства. В общем, разностные поправки псевдодальностей могут быть определены для любого сочетания одной или более базовых станций. Разностные поправки псевдодальности используются для учета различных источников происхождения погрешности, включая эффект многолучевого распространения.
Фиг.2 представляет собой блок-схему алгоритма способа 200 определения разностных поправок псевдодальностей для передатчиков, входящих в состав менее точной подсистемы определения местоположения (например, базовых станций в системе сотовой связи). Сначала решается вопрос о том, доступна или нет точная подсистема определения местоположения (этап 212). Эта точная подсистема определения местоположения может представлять собой любую систему, которую можно использовать для точного определения местоположения оконечного устройства, такую как система GPS. Если точная подсистема определения местоположения недоступна, то согласно данному способу ждут до тех пор, пока эта подсистема не станет доступна. В случае, если подсистема доступна, согласно данному способу осуществляется переход к этапу 214.
На этапе 214 на основе использования точной подсистемы определения местоположения определяют точную оценку местоположения оконечного устройства. В случае использования системы GPS, сигналы от четырех или более спутников системы GPS могут быть измерены и использованы для получения псевдодальностей до этих спутников. Псевдодальности могут затем быть предоставлены для обработки в соответствии с алгоритмом наименьших средних квадратов или каким-либо другим подходящим алгоритмом для вычисления точной оценки местоположения оконечного устройства, которая обозначается как (x, y, z)T. Точную оценку местоположения можно также получить и при помощи других средств, например, посредством приема сигнала от точки доступа в системе Bluetooth или от псевдоспутника (описываемого ниже), посредством ручного ввода данных пользователем, посредством приема вспомогательной информации от сетевого устройства (например, устройства определения местоположения) и другими средствами, подобными этим.
Затем (этап 216) на основе (1) точной оценки местоположения (x, y, z)T оконечного устройства и (2) координат местонахождения (x, y, z)Bi базовой станции вычисляют «ожидаемое» значение псевдодальности
 от оконечного устройства до каждой базовой станции, которое может быть использовано для определения оценки местоположения оконечного устройства в более поздний момент времени. Это ожидаемое значение псевдодальности может рассматриваться как «истинная» дальность. Координаты местонахождения базовой станции могут быть переданы оконечному устройству способом, описанным ниже (например, посредством сообщений или сигналов). Ожидаемое значение псевдодальности до базовой станции i может быть вычислено по формуле
от оконечного устройства до каждой базовой станции, которое может быть использовано для определения оценки местоположения оконечного устройства в более поздний момент времени. Это ожидаемое значение псевдодальности может рассматриваться как «истинная» дальность. Координаты местонахождения базовой станции могут быть переданы оконечному устройству способом, описанным ниже (например, посредством сообщений или сигналов). Ожидаемое значение псевдодальности до базовой станции i может быть вычислено по формуле

или

где (x, y, z)T = xT, yT, zT, а (x, y, z)Bi = xBi, yBi, zBi. Ожидаемое значение псевдодальности представляет собой расстояние по линии прямой видимости между оконечным устройством и базовой станцией i и является точным значением, поскольку оно вычислено на основе точной оценки местоположения (x, y, z)T оконечного устройства и известных координат (x, y, z)Bi базовой станции.
После этого определяют «измеренную» псевдодальность RBi до каждой базовой станции (этап 218). Это может быть сделано путем приема и обработки сигнала от базовой станции, определения времени τi, которое требуется для прохождения сигнала от базовой станции до оконечного устройства, и вычисления измеренной псевдодальности по формуле: RBi=с·τi. Время τi может быть оценено на основе фазы пилот-сигнала в сигнале прямого направления, принятого от базовой станции (то есть измерения фазы пилот-сигнала), используя для этого опорный момент отсчета времени оконечного устройства в соответствии с процедурами, известными в данной области техники. Опорный момент отсчета времени оконечного устройства может быть выверен или установлен на основе решения, основанного на системе GPS, или задержки на прохождение сигнала в прямом и обратном направлениях (RTD), как это описано выше.
После этого на основе (1) ожидаемого значения псевдодальности  до базовой станции и (2) измеренной псевдодальности RBi до базовой станции определяют (на этапе 220) разностную поправку RESBi псевдодальности для каждой базовой станции, которая может быть использована для определения оценки местоположения оконечного устройства в более поздний момент времени. Разностная поправка RESBi псевдодальности для базовой станции i может быть вычислена по формуле
до базовой станции и (2) измеренной псевдодальности RBi до базовой станции определяют (на этапе 220) разностную поправку RESBi псевдодальности для каждой базовой станции, которая может быть использована для определения оценки местоположения оконечного устройства в более поздний момент времени. Разностная поправка RESBi псевдодальности для базовой станции i может быть вычислена по формуле

Разностная поправка псевдодальности показывает расхождение между (1) измеренной псевдодальностью RBi, которая получена на основе сигнала принятого от базовой станции, и (2) ожидаемым значением псевдодальности, которое вычислено на основе некоторой другой более точной информации. Измеренная псевдодальность RBi может быть выражена формулой

где  является истинной дальностью от оконечного устройства до базовой станции, Ti представляет собой все погрешности, связанные с оконечным устройством, Bi представляет собой все погрешности, связанные с базовой станцией, а Mi является погрешностью, связанной со средой распространения сигнала, которая включает в себя погрешность от многолучевого распространения. Истинная дальность
является истинной дальностью от оконечного устройства до базовой станции, Ti представляет собой все погрешности, связанные с оконечным устройством, Bi представляет собой все погрешности, связанные с базовой станцией, а Mi является погрешностью, связанной со средой распространения сигнала, которая включает в себя погрешность от многолучевого распространения. Истинная дальность  может быть аппроксимирована ожидаемым значением
может быть аппроксимирована ожидаемым значением  псевдодальности (то есть
псевдодальности (то есть  Погрешности, связанные с оконечным устройством и базовой станцией, обычно не изменяются с течением времени или могут изменяться постепенно. Погрешность Ti включает в себя параметр η, который представляет собой погрешность, связанную с шумом измерения приемника (или тепловым шумом, который может быть представлен гауссовым шумом). Параметр η изменяется от одного измерения к другому, но может быть либо (1) принят пренебрежимо малым, либо (2) учтен таким же образом, как погрешности измерений фазы пилот-сигнала. Погрешность от многолучевого распространения Mi может быть разложена на (1) большую составляющую погрешности, вызываемую крупными препятствиями (например, зданиями, сооружениями и подобными им объектами), которая не меняется с течением времени (например, она может быть представлена переходным процессом погрешности, имеющим большую постоянную времени), и (2) малую составляющую погрешности, вызываемую другими препятствиями (например, она может быть представлена переходным процессом погрешности, имеющим малую постоянную времени). Малая составляющая погрешности, вызванная быстрым многолучевым распространением сигнала, может быть принята пренебрежимо малой по сравнению с большой составляющей погрешности, вызванной медленным многолучевым распространением сигнала. Таким образом, разностная поправка псевдодальности (которая может быть выражена формулой RESBi
Погрешности, связанные с оконечным устройством и базовой станцией, обычно не изменяются с течением времени или могут изменяться постепенно. Погрешность Ti включает в себя параметр η, который представляет собой погрешность, связанную с шумом измерения приемника (или тепловым шумом, который может быть представлен гауссовым шумом). Параметр η изменяется от одного измерения к другому, но может быть либо (1) принят пренебрежимо малым, либо (2) учтен таким же образом, как погрешности измерений фазы пилот-сигнала. Погрешность от многолучевого распространения Mi может быть разложена на (1) большую составляющую погрешности, вызываемую крупными препятствиями (например, зданиями, сооружениями и подобными им объектами), которая не меняется с течением времени (например, она может быть представлена переходным процессом погрешности, имеющим большую постоянную времени), и (2) малую составляющую погрешности, вызываемую другими препятствиями (например, она может быть представлена переходным процессом погрешности, имеющим малую постоянную времени). Малая составляющая погрешности, вызванная быстрым многолучевым распространением сигнала, может быть принята пренебрежимо малой по сравнению с большой составляющей погрешности, вызванной медленным многолучевым распространением сигнала. Таким образом, разностная поправка псевдодальности (которая может быть выражена формулой RESBi Ti+Bi+Mi) обычно действительна в течение, по меньшей мере, некоторого периода времени, при этом продолжительность этого периода времени зависит от характеристик среды распространения и других факторов.
Ti+Bi+Mi) обычно действительна в течение, по меньшей мере, некоторого периода времени, при этом продолжительность этого периода времени зависит от характеристик среды распространения и других факторов.
В одном варианте осуществления изобретения эти апостериорные погрешности, связанные с оценками местоположения оконечного устройства, могут быть использованы для определения априорных погрешностей измерения, связанных с псевдодальностями, измеряемыми в наземной системе. С оценкой местоположения оконечного устройства и/или разностными поправками псевдодальностей могут быть связаны различные параметры погрешностей. Например, для оценки местоположения могут быть определенны эллипс погрешности и его ориентация. Затем может быть определено местоположение каждой базовой станции относительно эллипса погрешности, и в зависимости от расположения базовой станции относительно эллипса погрешности может быть получена оценка погрешности для разностной поправки псевдодальности. Например, проекция вектора линии прямой видимости, заключенного между оценкой местоположения оконечного устройства и базовой станцией, на эллипс погрешности может быть использована как мера погрешности ожидаемого значения псевдодальности. Оценка погрешности ожидаемого значения псевдодальности может учитывать неопределенность в местонахождении базовой станции. Оценка погрешности показывает степень достоверности (то есть качества) соответствующего измерения. Например, оценка погрешности разностной поправки псевдодальности может быть использована для будущих оценок местоположения, которые опираются на эту разностную поправку псевдодальности. Пример такого использования может включать в себя определение относительного веса разностной поправки при помощи алгоритма наименьших средних квадратов или какого-либо другого соответствующего алгоритма. Другие параметры (например, отношение сигнал-шум, отношение сигнал-интерференция, уровень пилот сигнала, среднеквадратическое значение погрешности, оценка погрешности от многолучевого распространения и тому подобное) могут также быть оценены и использованы для получения оценки погрешности измеренной псевдодальности, и это не выходит за пределы объема данного изобретения. Оценка погрешности разностной поправки псевдодальности может включать в себя оценку погрешности, по меньшей мере, одной из оцененной псевдодальности и измеренной псевдодальности.
Затем определяют статистические параметры погрешностей оценки местоположения и разностных поправок псевдодальностей для базовых станций (этап 222). Статистические параметры погрешностей могут включать в себя эллипс погрешностей, отношение сигнал-шум пилот-сигнала и тому подобные параметры и используются для получения оценок погрешностей. После этого, используя только что определенные статистические параметры погрешностей, обновляют статистические параметры погрешностей, связанные с разностными поправками псевдодальностей (этап 224). Таким образом, для разностных поправок псевдодальностей могут поддерживаться точные и актуальные статистические параметры погрешностей.
Выше было описано соотношение между апостериорными погрешностями и априорными погрешностями. Апостериорные погрешности, связанные с оценкой местоположения, могут быть использованы для определения соответствующей погрешности в оцененной псевдодальности, которая в свою очередь используется для вычисления разностной поправки псевдодальности. Оценки погрешностей разностных поправок псевдодальностей являются априорными ошибками измерений.
В другом варианте осуществления изобретения разностная поправка псевдодальности для конкретной базовой станции может быть определена на базе совокупности измеренных в наземной системе псевдодальностей, полученных рядом оконечных устройств, расположенных в непосредственной близости друг от друга как в пространственной, так и во временной областях. Псевдодальности между оконечным устройством и базовой станцией могут быть сообщены системе сотовой связи (например, обслуживающей базовой станции), которая после этого может сопоставить разностные поправки псевдодальностей с оценкой местоположения оконечного устройства. Конкретная разностная поправка, которая будет использоваться данным оконечным устройством для каждой базовой станции, может затем определяться на основе совокупности измеренных в наземной системе псевдодальностей, предоставленных рядом оконечных устройств.
В еще одном варианте осуществления изобретения разностная поправка псевдодальности для конкретной базовой станции может обрабатываться дифференциальным способом, при котором измеренная псевдодальность для конкретного оконечного устройства корректируется при помощи разностной поправки псевдодальности, полученной на основе измерений ряда оконечных устройств, расположенных в непосредственной близости по отношению к данному оконечному устройству как в пространственной, так и во временной области. В одном примере осуществления изобретения разностная поправка псевдодальности для некоторой базовой станции может быть предоставлена мобильному оконечному устройству по сети сотовой связи как элемент вспомогательных данных. В качестве альтернативы, эти вспомогательные данные могут совместно использоваться оконечными устройствами, расположенными в пространственной близости друг от друга.
Способы сбора статистических данных для измерений псевдодальностей описаны также в заявке на патент США с регистрационным номером 09/697781, поданной 26 октября 2000 года и озаглавленной «Method and Apparatus for Determining an Error Estimate in a Hybrid Position Determination System» («Способ и устройство для определения оценки погрешности в смешанной системе определения местоположения»), права на которую переданы правообладателю настоящей заявки.
Описанная выше разностная поправка псевдодальности может быть с успехом использована для повышения точности оценки местоположения оконечного устройства. Было установлено, что имеется предсказуемая зависимость между определенными параметрами (такими как местоположение оконечного устройства) и величиной погрешности в менее точном наборе измерений (например, в измеренных псевдодальностях до базовых станций). Следовательно, зная как значение параметра, так и величину погрешности, связанной с этим параметром, можно получить оценку величины погрешности менее точных измерений. Например, зная приблизительную оценку местоположения оконечного устройства и зависимость между оценкой местоположения и величиной погрешности, связанной с оценкой местоположения, можно оценить величину погрешности измеренных псевдодальностей до базовых станций в системе сотовой связи.
Смешанная система определения местоположения включает в себя две (или возможно более) подсистемы определения местоположения. Как показано в Таблице 1, различные подсистемы определения местоположения могут быть связаны с различными характеристиками точности и могут быть доступны в различных условиях. В одном аспекте данного изобретения оценка местоположения оконечного устройства определяется на основе наиболее точной подсистемы определения местоположения или комбинации подсистем, доступных оконечному устройству в момент времени, в который определяется оценка местоположения. Более того, для обеспечения повышенной точности измерения, полученные с использованием менее точной подсистемы определения местоположения, могут быть скорректированы (или компенсированы) с использованием разностных поправок псевдодальности, определенных для этой подсистемы.
Фиг.3 представляет собой блок-схему алгоритма способа 300, предназначенного для определения оценки местоположения оконечного устройства беспроводной связи, при котором достигаются высокие точность и доступность. Каждая подсистема определения местоположения в смешанной системе определения местоположения связана с независимо получаемым набором измерений. Оконечное устройство может быть сконструировано таким образом, чтобы обладать способностью определять свое местоположение (1) на основе только измерений по передатчикам, входящим в состав точной подсистемы определения местоположения, (2) на основе измерений по передатчикам как входящим в состав точной, так и входящим в состав менее точной подсистем определения местоположения, или (3) на основе только измерений, полученных для передатчиков, входящих в состав менее точной подсистемы определения местоположения. Для достижения высоких точности и доступности при определении местоположения используется самый лучший набор из измерений, доступных оконечному устройству.
Сначала решается вопрос о том, доступна или нет точная подсистема определения местоположения (этап 312). Эта точная подсистема определения местоположения может представлять собой любую систему, которая может быть использована для точного определения оценки местоположения оконечного устройства, такую как система GPS. Измерения по спутникам обычно имеют более высокую точность, чем измерения по базовым станциям, что вызвано различными факторами, включая тот факт, что спутники находятся наверху и имеется более высокая вероятность того, что сигналы со спутников достигнут оконечного устройства по прямой траектории. Таким образом, если точная система определения местоположения доступна, то оценка местоположения оконечного устройства определяется только на основе точной подсистемы определения местоположения (этап 316). В случае системы GPS сигналы от достаточного количества (например, четырех или более) спутников системы GPS могут быть измерены и использованы для получения псевдодальностей до этих спутников, которые далее используются для вычисления точной оценки местоположения (x, y, z)T оконечного устройства. Процедура вычисления местоположения оконечного устройства на этом заканчивается. В некоторых вариантах осуществления изобретения разностные поправки псевдодальностей могут быть обновлены на основе точной оценки местоположения, определенной на этапе 316. В этом случае после этапа 316 могут быть выполнены этапы с 216 по 224, показанные на Фиг.2.
В противном случае, если точная подсистема определения местоположения недоступна в той мере, которая необходима для получения решения, основанного только на этой подсистеме, решается вопрос о том, доступна или нет точная подсистема определения местоположения, хотя бы частично (этап 322). Обычно в системе GPS для получения трехмерной оценки местоположения оконечного устройства необходимо четыре или более спутника системы GPS. Минимальное количество спутников, требуемых для определения местоположения оконечного устройства, может быть сокращено, если имеется другая вспомогательная информация, такая как, например, синхронизирующие данные в сетях, использующих протокол CDMA (Множественного доступа с кодовым разделением каналов), вспомогательные данные о высоте и тому подобные данные. Если доступно менее чем минимальное количество спутников, то измерения по доступным спутникам могут быть использованы в сочетании с измерениями по базовым станциям, что обеспечит получение смешанного решения, которое было бы следующим по уровню точности. Поэтому решается вопрос о том, доступна ли для нахождения смешанного решения также и менее точная подсистема определения местоположения (этап 324). Эта менее точная подсистема определения местоположения может представлять собой любую систему, которая также может быть использована для содействия в определении и/или определения местоположения оконечного устройства, такую как система сотовой связи. В одном варианте осуществления изобретения измерения по базовым станциям используются только для дополнения измерений по спутникам в случае, когда доступно недостаточное количество спутников, и только в той мере, в которой это необходимо.
Если точная и менее точная подсистемы определения местоположения доступны, то на основе сочетания этих подсистем определяется оценка местоположения оконечного устройства (этап 326). Смешанное решение может быть получено посредством (1) получения фактических измерений (например, измеренных псевдодальностей) по достаточному количеству передатчиков (например, спутников и базовых станций), (2) корректировки фактических измерений, полученных для менее точной подсистемы определения местоположения, при помощи разностных поправок, определенных ранее для этой менее точной подсистемы, и (3) определение оценки местоположения оконечного устройства на основе сочетания фактических измерений, полученных для точной подсистемы определения местоположения, и скорректированных измерений, полученных для менее точной подсистемы определения местоположения. В качестве альтернативы, разностные поправки могут не определяться заранее; они могут предоставляться оконечному устройству как помощь в почти реальном масштабе времени. Более того, некорректированные измерения, полученные для менее точной подсистемы определения местоположения, могут также быть использованы для нахождения смешанного решения в случае, если для передатчиков, связанных с этими нескорректированными измерениями, разностные поправки недоступны. Более подробно этап 326 описывается ниже. В некоторых вариантах осуществления изобретения разностные поправки псевдодальностей могут обновляться на основе оценки местоположения, определенной на этапе 326. В этом случае после этапа 316 могут быть выполнены этапы с 216 по 224, показанные на Фиг.2. На этом процедура заканчивается. Возвращаясь к этапу 324, отметим, что, если сочетание точной и менее точной подсистем определения местоположения недостаточно для получения смешанного решения, то может быть выдано сообщение об ошибке (этап 328), и после этого процедура заканчивается.
Если в соответствии с тем, что определено на этапе 322, точная подсистема определения местоположения недоступна, то решается вопрос о том, доступна или нет менее точная подсистема определения местоположения (этап 332). В системе сотовой связи для получения оценки местоположения оконечного устройства может быть достаточно двух или более базовых станций. Если менее точная подсистема определения местоположения доступна, то оценка местоположения оконечного устройства определяется на основе измерений, полученных для этой подсистемы (этап 336). Для обеспечения повышения точности решения фактические измерения корректируются при помощи разностных поправок, определенных ранее для этой менее точной подсистемы определения местоположения (если эти поправки доступны). Этап 336 также описывается более подробно ниже. На этом процедура заканчивается. Возвращаясь к этапу 332, отметим, что, если менее точная подсистема определения местоположения недоступна, то может быть выдано сообщение об ошибке (этап 338), и после этого процедура заканчивается. В качестве альтернативы, перед завершением на этапе 338 система может отступить к некоторому страховочному решению, такому как усовершенствованная система сотовой идентификации CELL-ID, вычислить оценку местоположения и затем завершить процедуру. В таком варианте осуществления изобретения вышеупомянутая система будет всегда генерировать оценку местоположения с изменяющейся точностью, зависящей от доступности различных подсистем определения местоположения.
В приведенном выше описании, касающемся этапов 326 и 336, одно или более измерений, полученных по одному или более передатчикам второй подсистемы, могут быть отобраны для использования с целью определения оценки местоположения оконечного устройства. Эти связанные с передатчиками измерения могут быть отобраны на основе одного или более критериев отбора. Такие критерии могут включать в себя, например, доступность точной информации «альманаха» базовой станции, наличие ретрансляторов, статистических показателей (таких как среднеквадратическая ошибка, отношение сигнал-шум, отношение сигнал-интерференция, многолучевое распространение сигнала, общий весовой коэффициент, который может зависеть от наличия разностной поправки) и тому подобные критерии.
В одном варианте осуществления изобретения при помощи информации, полученной для точной подсистемы определения местоположения (или, возможно, как для точной, так и для менее точной подсистем определения местоположения), определяется начальная и точная оценка местоположения. После этого оценка местоположения оконечного устройства может обновляться на основе измерений, получаемых для точной и/или менее точной подсистем определения местоположения.
В одном варианте осуществления изобретения, если доступны какие-либо спутниковые измерения, то эти спутниковые измерения и используются для вычисления обновленной оценки местоположения. При потере сигналов от точной подсистемы определения местоположения может быть получено «свободное» решение, в котором для обновления оценки местоположения используются только измерения, получаемые для менее точной подсистемы определения местоположения. «Свободное» решение может быть выдано в тех случаях, когда точная подсистема определения местоположения недоступна (например, никакие спутники системы GPS не находятся в зоне видимости), или если требуется оставаться настроенным на менее точную подсистему определения местоположения. «Свободное» решение можно получать и использовать до тех пор, пока не будет решено, что это решение более не является достоверным или необходимым.
Для повышения качества обновлений оценки местоположения оконечного устройства в условиях действия сценария «свободного» решения и для компенсации погрешностей измерений в наземной системе к вновь измеренным наземным способом псевдодальностям применяют разностные поправки псевдодальностей. Может быть показано, что для обновления двухмерной оценки местоположения оконечного устройства достаточно информации от двух базовых станций, идущей в прямом или обратном направлениях. По причине органически присущего изменяющегося во времени характера искажений в каналах связи обновленная оценка будет со временем деградировать и, в конечном счете, для точной оценки местоположения может быть получено новое решение, основанное на системе GPS.
Фиг.4 представляет собой блок-схему алгоритма способа 400, предназначенного для определения оценки местоположения устройства беспроводной связи с использованием для повышения точности разностных поправок псевдодальностей. Способ 400 может быть использован на каждом из этапов 326 и 336, показанных на Фиг.3. В некоторых ситуациях достаточное количество измерений для точной подсистемы определения местоположения является недоступным, что не позволяет вычислить точное (например, основанное на системе GPS) решение. В таких ситуациях может потребоваться вычислить оценку местоположения оконечного устройства с использованием одного или более измерений, полученных для менее точной подсистемы определения местоположения. Измерения, полученные по передатчикам, входящим в менее точную подсистему определения местоположения, можно скорректировать так, чтобы учесть погрешности этих измерений.
Сначала производят измерения для точной подсистемы определения местоположения, если эта подсистема доступна (этап 412). Например, может быть определена измеренная псевдодальность RSj до каждого доступного спутника системы GPS на основе сигнала, принятого с этого спутника. После этого производят измерения для менее точной подсистемы определения местоположения (этап 414). Например, может быть определена измеренная псевдодальность RBi до каждой доступной базовой станции на основе сигнала, принятого с этой базовой станции. На этапах 412 и 414 получают достаточное количество измерений для определения оценки местоположения оконечного устройства. Например, смешанное решение может быть получено для трехмерной оценки местоположения на основе (1) измерений по трем спутникам системы GPS и одной базовой станции, (2) измерений по двум спутникам системы GPS и одной базовой станции (как по времени, так и по дальности) или (3) измерений по одному спутнику системы GPS и двум базовым станциям. При оценке местоположения оконечного устройства на основе измерений по двум или более базовым станциям может быть получено «свободное» решение.
В одном варианте осуществления изобретения каждое измерение, полученное для менее точной подсистемы определения местоположения, затем корректируется, если доступна связанная с ним разностная поправка (этап 416). Например, измеренная псевдодальность RBi до каждой базовой станции, подлежащая использованию для определения оценки местоположения оконечного устройства, может быть скорректирована при помощи разностной поправки псевдодальности RESBi, определенной для этой базовой станции. Скорректированная псевдодальность  по базовой станции i может быть вычислена по формуле
по базовой станции i может быть вычислена по формуле

В качестве альтернативы, если разностные поправки недоступны для всех измерений, полученных для менее точной подсистемы определения местоположения, может быть выполнена процедура отбора, предназначенная для определения того, какие измерения, полученные для менее точной подсистемы определения местоположения, могут быть использованы в процедуре определения оценки местоположения. Отбор может основываться на доступности разностных поправок, геометрии расположения базовой станции относительно оконечного устройства (которая может быть выражена в терминах показателя снижения точности в горизонтальном направлении), качестве измеренных псевдодальностей или некоторых других статистических параметрах.
Скорректированные измерения, полученные для менее точной подсистемы определения местоположения, затем вместе с фактическими измерениями (если таковые имеются), полученными для точной подсистемы определения местоположения, используются для определения оценки местоположения оконечного устройства или для обновления оценки местоположения оконечного устройства (этап 418). Например, смешанное решение может быть вычислено на основе (1) измеренных псевдодальностей до одного или более спутников системы GPS, (2) данных о местонахождении этих спутников, (3) скорректированных псевдодальностей до одной или более базовых станций и (4) данных о местонахождении этих базовых станций. Решение на основе наземной системы может быть вычислено на основе (1) скорректированных псевдодальностей до двух или более базовых станций и (2) координат этих базовых станций. Алгоритм вычисления смешанного решения или решения на основе наземной системы, основанный на использовании вышеупомянутой информации, описывается ниже. Также могут быть обновлены статистические параметры погрешности, связанные с обновленной оценкой местоположения (этап 420).
Согласно алгоритму наименьших средних квадратов может быть выполнен ряд итераций для определения оценки местоположения оконечного устройства. При каждой итерации на основе текущей оценки местоположения оконечного устройства вычисляются ожидаемые значения измерений по достаточному количеству передатчиков, вычисляется вектор погрешности между ожидаемыми и фактическими значениями измерений, и текущая оценка местоположения обновляется на основе вычисленной погрешности. Алгоритм может завершить свою работу в случае, когда вычисленная погрешность достаточно мала (например, ниже некоторого конкретного порогового значения).
В случае применения алгоритма наименьших средних квадратов оценка местоположения оконечного устройства на k-ой итерации может быть обозначена как Pk=[xk yk zk]T, а координаты местонахождения передатчиков обозначаются как Li=[xi yi zi]Т, для i={1, 2, ... N}, где индекс «Т» обозначает транспонирование. В одном варианте осуществления изобретения оценка местоположения оконечного устройства также может включать в себя составляющую времени tk для учета любой погрешности временной шкалы. В этом случае оценка местоположения оконечного устройства на k-ой итерации может быть обозначена как Pk=[xk yk zk tk]T. Вектор-столбец для N вычисленных измерений [ может быть определен для k-ой итерации на основе (1) текущей оценки местоположения Pk=[xk yk zk]T оконечного устройства и (2) координат местонахождения N передатчиков. Этот вектор
может быть определен для k-ой итерации на основе (1) текущей оценки местоположения Pk=[xk yk zk]T оконечного устройства и (2) координат местонахождения N передатчиков. Этот вектор  включает в себя по одному вычисленному измерению
включает в себя по одному вычисленному измерению  для каждого из N передатчиков, которое предполагается использовать для определения оценки местоположения оконечного устройства. Измерение может относиться к любому из ряда возможных типов. В одном варианте осуществления изобретения измерение относится к псевдодальности. Псевдодальность между текущей оценкой местоположения оконечного устройства Pk и местонахождением Li I-го передатчика может быть вычислена по формуле
для каждого из N передатчиков, которое предполагается использовать для определения оценки местоположения оконечного устройства. Измерение может относиться к любому из ряда возможных типов. В одном варианте осуществления изобретения измерение относится к псевдодальности. Псевдодальность между текущей оценкой местоположения оконечного устройства Pk и местонахождением Li I-го передатчика может быть вычислена по формуле

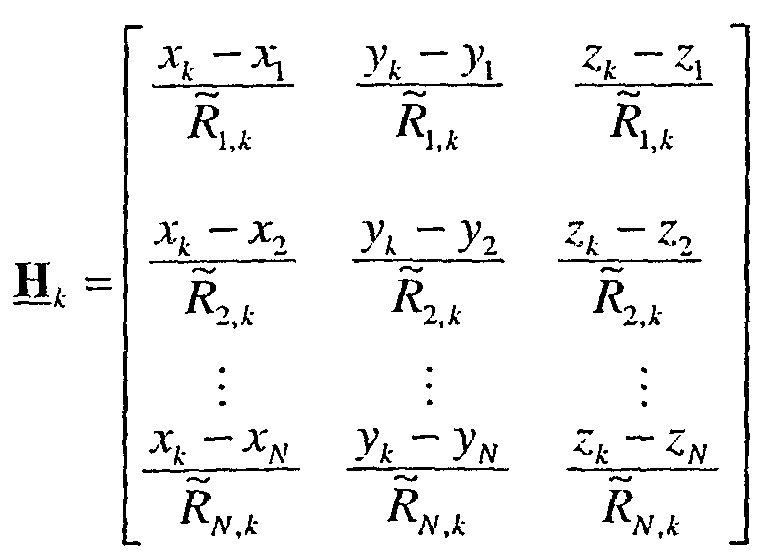
Геометрическая матрица Нk для координат местонахождения передатчиков (то есть Li=[xi yi zi]Т для i={1, 2, ... N}) и текущей оценки местоположения оконечного устройства Pk=[xk yk zk]T может быть определена по формуле
Ковариационная матрица С измерений может быть определена по формуле
где R обозначает вектор псевдодальностей для N передатчиков (то есть измеренные псевдодальности RSj по спутникам (если таковые имеются) и скорректированные псевдодальности  по базовым станциям, причем все эти псевдодальности получены на основе измерений сигналов), а Е обозначает математическое ожидание. Для смешанного решения вектор R может включать в себя две измеренные псевдодальности до двух спутников системы GPS и одну скорректированную псевдодальность до одной базовой станции (например,
по базовым станциям, причем все эти псевдодальности получены на основе измерений сигналов), а Е обозначает математическое ожидание. Для смешанного решения вектор R может включать в себя две измеренные псевдодальности до двух спутников системы GPS и одну скорректированную псевдодальность до одной базовой станции (например,  одной измеренной псевдодальности до одного спутника системы GPS и двух скорректированных псевдодальностей до двух базовых станций (например, R = [RS1 RВ1
одной измеренной псевдодальности до одного спутника системы GPS и двух скорректированных псевдодальностей до двух базовых станций (например, R = [RS1 RВ1 ]T) и так далее. Для «свободного» решения вектор R может включать в себя две или более скорректированные псевдодальности до двух или более базовых станций (например,
]T) и так далее. Для «свободного» решения вектор R может включать в себя две или более скорректированные псевдодальности до двух или более базовых станций (например, 
Вектор погрешности ek может быть вычислен по формуле

Как видно из уравнения (9), вектор погрешности ek равен разности между вектором псевдодальностей R и вектором вычисленных псевдодальностей  который получен на основе текущей оценки местоположения оконечного устройства на k-ой итерации.
который получен на основе текущей оценки местоположения оконечного устройства на k-ой итерации.
После этого на основе вектора погрешности ek вычисляется вектор уточнения Δk, который равен
Вектор уточнения Δk представляет собой оцененное отклонение текущей оценки местоположения Pk от оптимальной оценки местоположения. Следовательно, уточненная оценка местоположения оконечного устройства может быть выражена следующим образом:
Уравнения с (6) по (11) содержат вычисления для одной итерации алгоритма наименьших средних квадратов. Для получения все более и более точной оценки местоположения оконечного устройства может быть выполнено некоторое количество итераций.
Вычисления, выполняемые для определения оценки местоположения оконечного устройства, также описаны в патенте США № 6166685, выданном 26 декабря 2000 года и озаглавленном «Wireless User Position Update Using Infrastructure Measurement» («Уточнение местоположения пользователя устройства беспроводной связи с использованием инфраструктурного измерения»), и в патенте США № 5999124, выданном 7 декабря 1999 года и озаглавленном «Satellite Positioning System Augmentation with Wireless Communication Signals» («Дополнение системы спутникового местоопределения использованием сигналов беспроводной связи»).
Фиг.5 представляет собой структурную схему варианта исполнения приемного устройства 500, которое может быть компонентом устройства беспроводной связи. Приемное устройство 500 может быть сконструировано таким образом, что способно обрабатывать сигналы от множества подсистем определения местоположения, таких как система GPS и система сотовой связи. В варианте исполнения, показанном на Фиг.5, приемное устройство 500 включает в себя антенну 510, приемник 512а наземной системы, приемник 512b системы GPS, процессор 516, запоминающее устройство 518 и контроллер 520.
Антенна 510 принимает сигналы от ряда приемников (который может быть комбинацией спутников системы GPS и/или базовых станций) и предоставляет принятый сигнал приемникам 512а и 512b наземной системы и системы GPS. Приемник 512а наземной системы включает в себя препроцессорные схемы (например, радиочастотные схемы и/или другие обрабатывающие схемы), которые обрабатывают сигналы, переданные с базовых станций, с целью получения информации, используемой для определения местоположения. Например, приемник 512а наземной системы измеряет фазу пилот-сигнала в сигнале прямого направления, принимаемом от каждой базовой станции, для получения информации о времени, которая после этого может быть использована для получения измеренной псевдодальности до базовой станции.
Приемник 512а наземной системы может быть реализован в виде приемника гребеночного типа, способного параллельно обрабатывать множество экземпляров сигнала (или компонентов многолучевого распространения) в составе принимаемого сигнала. Приемник гребеночного типа включает в себя ряд пальцевых процессоров (или «пальцев»), каждый из которых может быть назначен обрабатывать и отслеживать конкретный компонент многолучевого распространения. Даже несмотря на то, что для обработки множества компонентов многолучевого распространения для данной базовой станции может быть предусмотрено множество пальцевых процессоров, для определения местоположения обычно используется только одна скорректированная псевдодальность для одного компонента многолучевого распространения (например, для самого раннего по времени поступления компонента многолучевого распространения или для самого мощного компонента многолучевого распространения). Разностная поправка псевдодальности может быть получена для каждого пальцевого процессора и использована для корректировки измеренной псевдодальности для этого пальцевого процессора. В качестве альтернативы, могут быть установлены и сохраняться соотношения по времени (или по дальности) между различными «пальцами». Таким образом, возможно использование различных компонентов многолучевого распространения сигнала данной базовой станции для определения местоположения в зависимости от эффектов замирания и многолучевого распространения.
Приемник 512b системы GPS включает в себя препроцессорные схемы, которые обрабатывают сигналы, переданные со спутников системы GPS с целью получения информации, используемой для определения местоположения. Процедура обработки сигналов приемниками 512а и 512b с целью извлечения соответствующей информации из сигналов системы GPS и сигналов наземной системы известна в данной области техники и здесь подробно не описывается. Приемники 512а и 512b предоставляют процессору 516 информацию различного типа, такую как, например, информацию по времени, идентификационные данные и данные о местонахождении передатчиков, чьи сигналы приняты, и тому подобные данные.
Процессор 516 может (например, периодически) получать точную оценку местоположения приемного устройства 500 на основе точной подсистемы определения местоположения (например, системы GPS). Процессор 516 может определить разностную поправку псевдодальности для каждой базовой станции (которая позже может быть использована для определения местоположения) на основе (1) точной оценки местоположения, (2) измеренной псевдодальности до базовой станции и (3) данных о местонахождении базовой станции так, как это было описано выше. После этого процессор 516 может определить оценку местоположения приемного устройства на основе измеренных псевдодальностей до спутников системы GPS и/или скорректированных псевдодальностей до базовых станций. Если для определения местоположения должны использоваться измеренные псевдодальности до базовых станций, то процессор 516 может для получения соответствующей скорректированной псевдодальности скорректировать каждую такую измеренную псевдодальность на основе соответствующей разностной поправки псевдодальности. (Разностная поправка псевдодальности для любой данной базовой станции может быть равна нулю в случае, если по этой базовой станции не известно никакой информации). Процессор 516 может исполнять алгоритм вычисления оценки местоположения оконечного устройства на основе измерений по спутникам системы GPS и/или базовым станциям.
Запоминающее устройство 518 хранит различные данные, используемые для определения местоположения. Например, запоминающее устройство 518 может хранить информацию, связанную с местонахождением спутника системы GPS (которая может быть получена из «Альманаха» и/или из эфемеридных данных), данные о местонахождении базовых станций (которые могут быть сообщены при помощи сигналов) и разностные поправки псевдодальностей. Запоминающее устройство 518 также может хранить коды и данные программ, предназначенные для процессора 516.
Контроллер 520 может управлять работой процессора 516. Например, контроллер 520 может выбирать конкретный тип решения, которое будет вычисляться (например, решение на основе системы GPS, смешанное решение, решение на основе наземной системы или страховочное решение), и т.д.
Хотя это и не показано на Фиг.5, приемное устройство 500 может поддерживать связь с Сервером местоопределения (или устройством определения местоположения), который может оказывать помощь в определении оценки местоположения оконечного устройства. Устройство определения местоположения может выполнять вычисления для получения оценки местоположения или может предоставлять определенную информацию, используемую для (1) получения измерений по спутнику и/или на базе наземной системы и/или (2) определения оценки местоположения (например, помощь в сборе данных, помощь в синхронизации, информация, касающаяся координат спутников системы GPS и/или базовых станций и т.п.).
Способы, описанные в данном документе, могут также использоваться с другими системами определения местоположения, отличными от смешанной системы определения местоположения, в случае, когда некоторые другие средства доступны для определения местоположения оконечного устройства в некоторые моменты времени или в некоторых местах, но не в другие моменты времени или не в других местах. В этом случае точная оценка местоположения оконечного устройства (каким бы способом она не была получена) может использоваться в качестве опорного значения для определения разностных поправок (которые могут показывать погрешность измеренных псевдодальностей) для менее точной подсистемы определения местоположения.
Способы, описанные в данном документе и предназначенные для такого использования доступных сигналов системы GPS и наземной системы, которая обеспечивает высокую точность и высокую доступность при определении оценки местоположения оконечного устройства, могут применяться в сочетании с различными системами и сетями беспроводной связи. Например, эти способы могут использоваться для систем множественного доступа с кодовым разделением каналов (CDMA), систем множественного доступа с разделением каналов по времени (TDMA), систем множественного доступа с разделением каналов по частоте (FDMA) и других систем беспроводной связи. Эти системы могут воплощать один или более применимых стандартов. Например, системы CDMA могут воплощать стандарты: IS-95, cdma2000, IS-856, W-CDMA (стандарт широкополосного множественного доступа с кодовым разделением каналов) и т.д. Системы TDMA могут воплощать стандарт GSM (Глобальной системы мобильной связи) и т.д. Эти разнообразные стандарты известны специалистам в данной области техники.
В данном описании упоминалась Глобальная навигационная система (GPS), принадлежащая Соединенным Штатам и представляющая собой пример Спутниковой навигационной системы (СНС). Следует, однако, понимать, что эти способы в равной мере применимы к другим спутниковым навигационным системам, таким как Российская система ГЛОНАСС и Европейская система Galileo. Таким образом, термин «GPS», используемый в данном описании, охватывает такие альтернативные спутниковые навигационные системы, включая Российскую систему ГЛОНАСС и Европейскую систему Galileo. Аналогичным образом, термин «сигналы системы GPS» охватывает сигналы от альтернативных спутниковых навигационных систем.
Более того, хотя в описании упомянуты спутники системы GPS, следует понимать, что данное описание в равной мере применимо к навигационным системам, которые используют псевдоспутники или сочетание спутников и псевдоспутников. Псевдоспутники представляют собой расположенные на Земле передатчики, которые передают псевдослучайный код (аналогичный сигналу системы GPS), модулирующий сигнал несущей диапазона L и обычно синхронизированный со временем системы GPS. Каждому такому передатчику может быть присвоен уникальный псевдослучайный код так, чтобы обеспечить возможность идентификации передатчика удаленным приемником. Псевдоспутники полезны в ситуациях, в которых сигналы системы GPS от обращающегося по орбите спутника могут быть недоступны, таких как туннели, шахты, здания, районы высотной городской застройки или другие загороженные районы. Подразумевается, что термин «спутник» в том значении, в котором он использован в данном описании, включает в себя псевдоспутники или эквиваленты псевдоспутников, и подразумевается, что термин «сигнал системы GPS», в том значении, в котором он использован в данном описании, включает в себя и GPS-подобные сигналы от псевдоспутников или эквивалентов псевдоспутников.
Способы определения местоположения, описанные в данном документе, могут быть реализованы различными средствами. Например, эти способы могут быть реализованы аппаратными средствами, программными средствами или комбинацией этих средств. В случае аппаратной реализации элементы, используемые для реализации какого-либо из этих способов или какой-либо комбинации этих способов, могут быть воплощены в одной или более интегральных схемах, специализированных по применению, процессорах цифровой обработки сигналов, устройствах цифровой обработки сигналов, программируемых логических устройствах, вентильных матрицах с эксплуатационным программированием, процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, сконструированных для выполнения описанных здесь функций или их комбинаций.
В случае программной реализации, способы определения местоположения могут быть воплощены в программных модулях (например, процедурах, функциях и т.п.), которые выполняют описанные здесь функции. Программные коды могут храниться в запоминающем устройстве (например, в запоминающем устройстве 518, показанном на Фиг.5) и исполняться процессором (например, процессором 516 или контроллером 520). Запоминающее устройство может быть выполнено в составе процессора или внешним по отношению к процессору, причем в последнем случае оно может быть соединено с процессором линией связи при помощи различных средств, известных специалистам в данной области техники.
Вышеизложенное описание рассмотренных вариантов осуществления данного изобретения приводится с той целью, чтобы обучить любого специалиста в данной области техники реализовывать и использовать настоящее изобретение. Специалисты в данной области техники легко представят себе разнообразные модификации данных вариантов осуществления изобретения, а общие принципы, определенные в данном описании, могут быть применены к другим вариантам осуществления, и это не выходит за рамки сущности и объема данного изобретения. Таким образом, настоящее изобретение не подразумевает своего ограничения теми вариантами осуществления, что приведены в данном описании, но должно иметь самый широкий объем, согласующийся с изложенными здесь принципами и отличительными признаками.
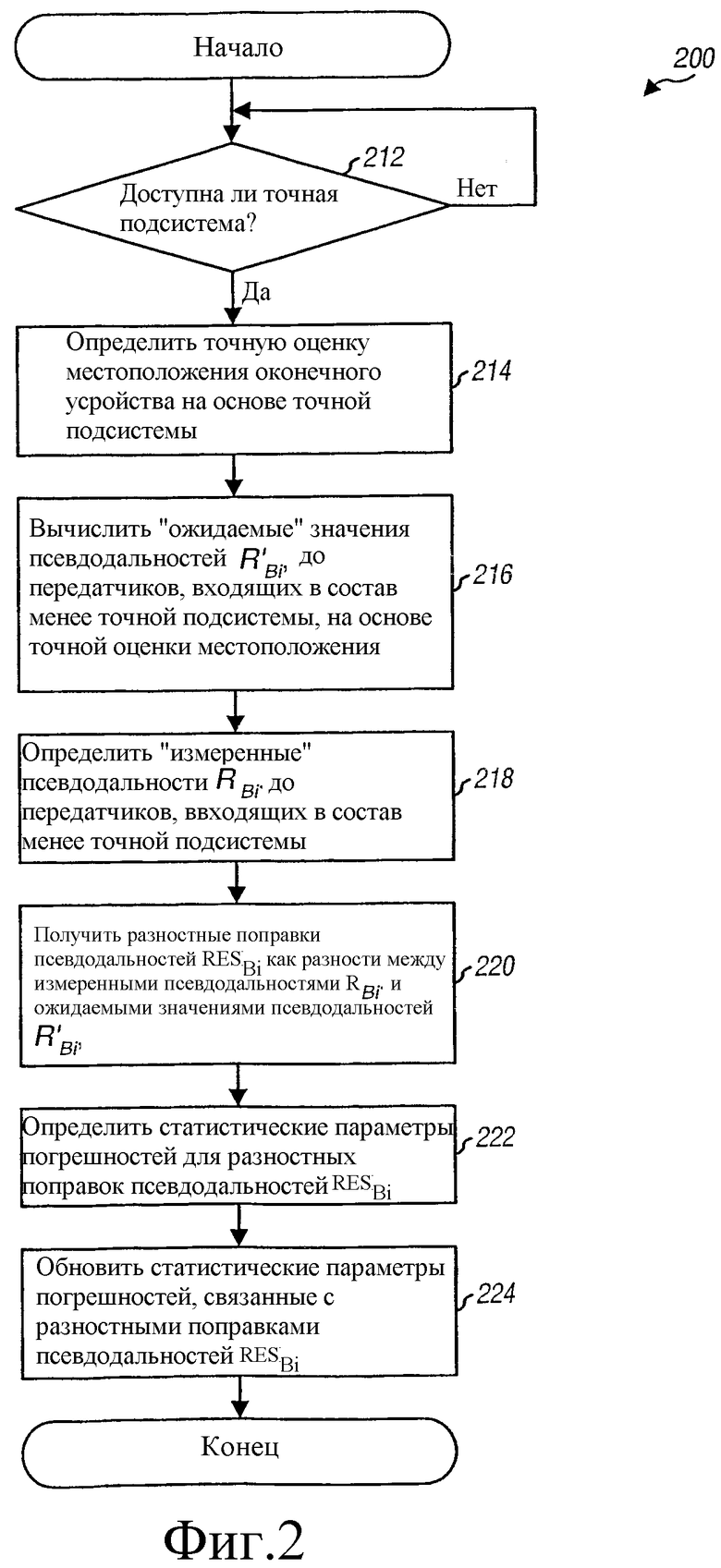
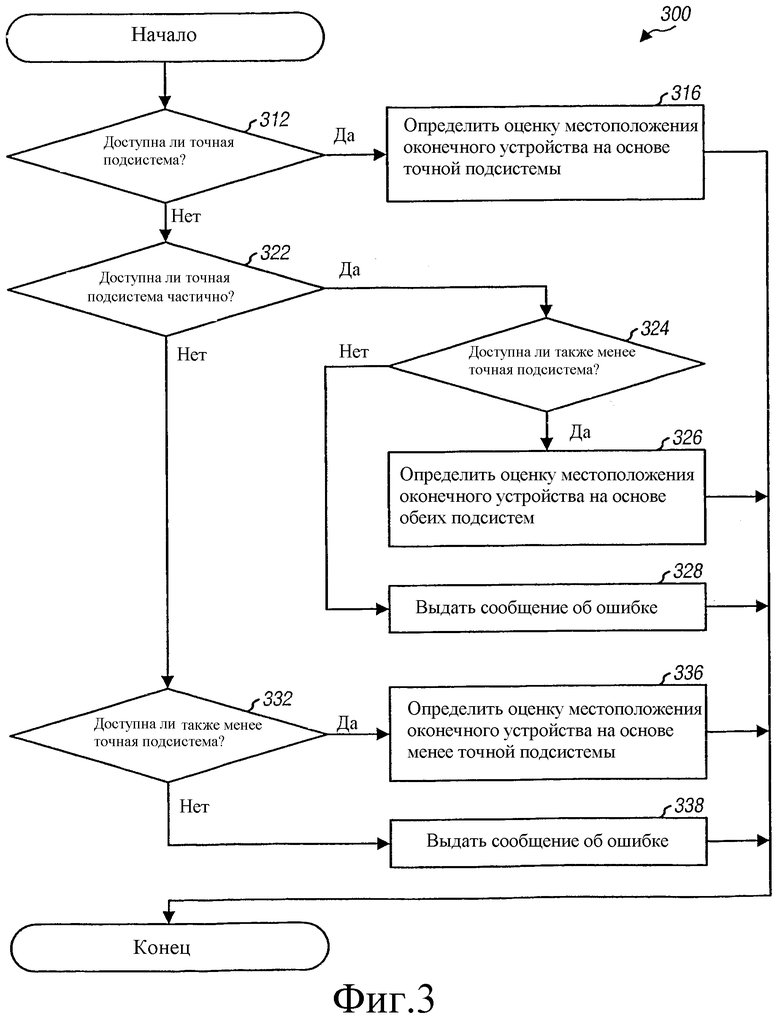
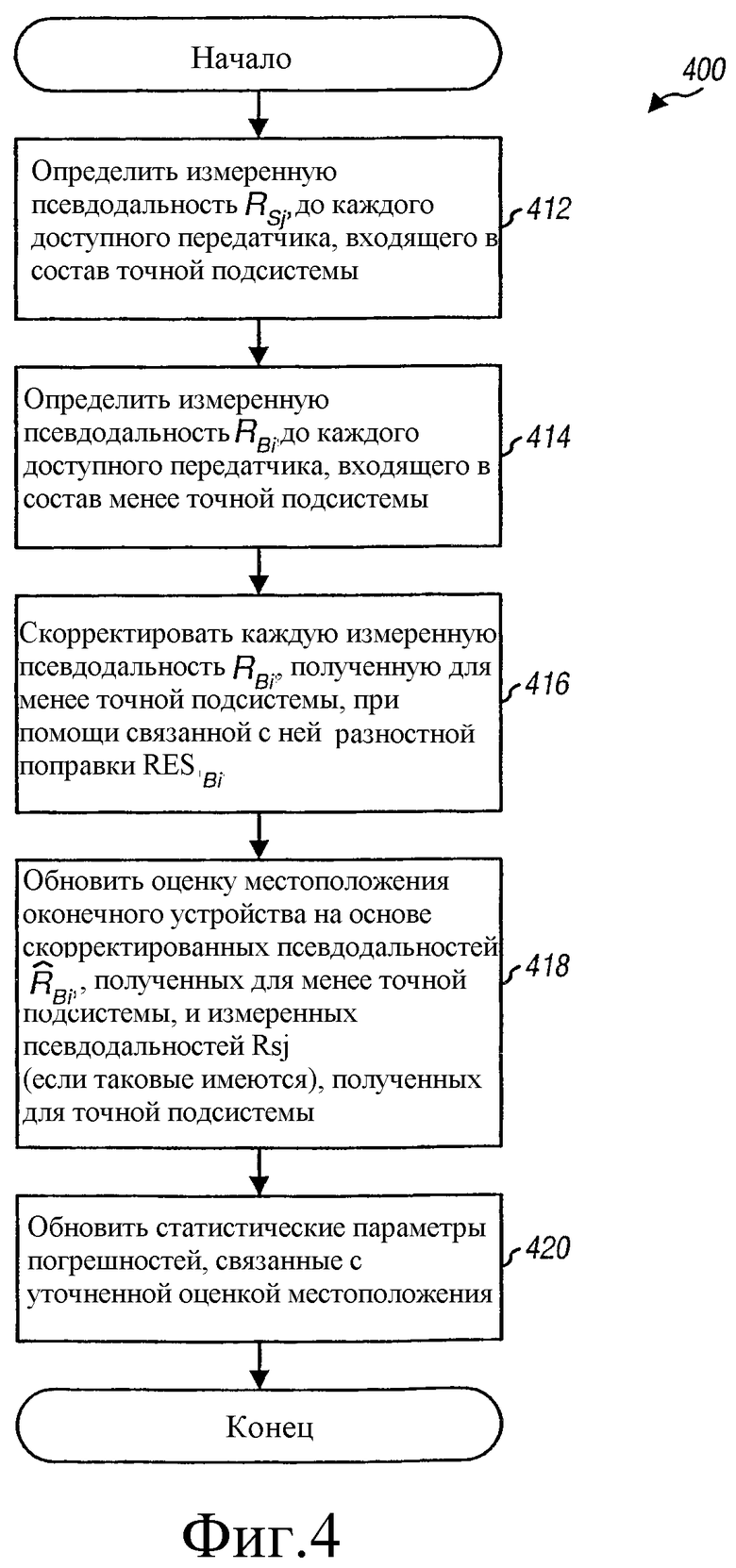
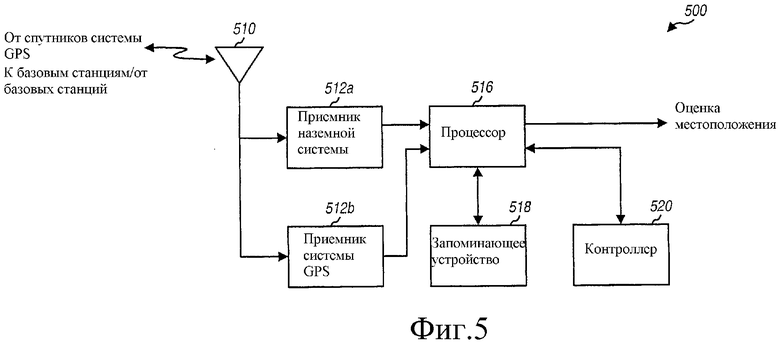
Предлагаются способы для определения оценки местоположения оконечного устройства беспроводной связи. Сначала получают точную оценку местоположения оконечного устройства (например, на основе первой (точной) подсистемы определения местоположения). По каждому из одного или более передатчиков (например, базовых станций), входящих в состав второй (менее точной) подсистемы определения местоположения, вычисляют «ожидаемое» значение псевдодальности на основе точной оценки местоположения оконечного устройства и местонахождения базовой станции; получают также «измеренную» псевдодальность; и затем на основе ожидаемого значения псевдодальности и измеренной псевдодальности определяют разностную поправку псевдодальности. После этого для определения обновленной оценки местоположения оконечного устройства получают измеренные псевдодальности по достаточному количеству передатчиков. Измеренная псевдодальность по каждой базовой станции может быть скорректирована на основе связанной с ней разностной поправки. Обновленную оценку местоположения определяют затем на основе скорректированных псевдодальностей по этим передатчикам. Техническим результатом является эффективное использование сигналов Глобальной навигационной системы и наземных сигналов, обеспечивающих высокую точность и высокую доступность при определении оценки местоположения оконечного устройства беспроводной связи. 9 н. и 29 з.п. ф-лы, 1 табл., 5 ил.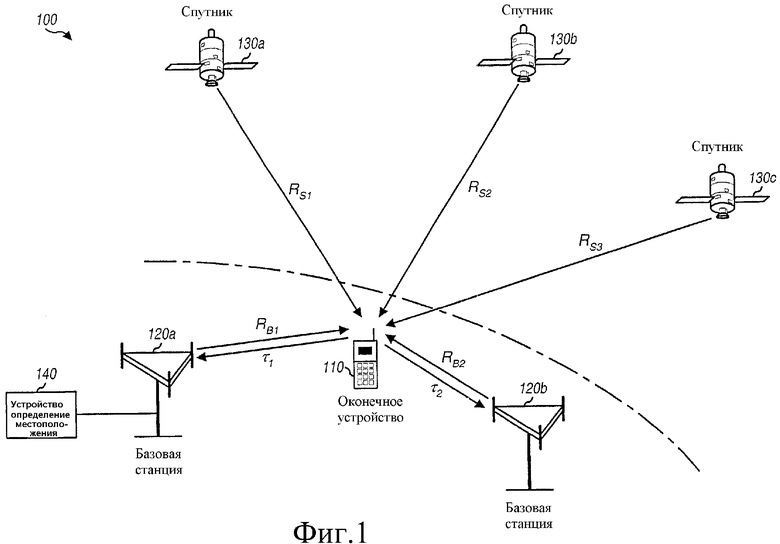
получают измерение псевдодальности по каждому из множества передатчиков, при этом множество передатчиков включает в себя, по меньшей мере, один передатчик, входящий в состав первой подсистемы определения местоположения;
принимают разностную поправку для каждого, по меньшей мере, одного передатчика, входящего в первую подсистему определения местоположения, при этом каждая разностная поправка указывает разницу между измерением местоположения, полученным для соответствующего передатчика первой подсистемы определения местоположения и ожидаемым значением измерения, основанным на одном или более измерениях, полученных при использовании второй, более точной, подсистемы определения местоположения;
корректируют измерение псевдодальности, полученное по каждому, по меньшей мере, одному передатчику, входящему в состав первой подсистемы определения местоположения, основываясь на принятой разностной поправке для этого передатчика; и
определяют оценку местоположения оконечного устройства, основываясь на множестве измерений по множеству передатчиков, причем множество измерений включает в себя, по меньшей мере, одно скорректированное измерение, по меньшей мере, по одному передатчику, входящему в первую подсистему определения местоположения.
получают точную оценку местоположения оконечного устройства на основе второй подсистемы определения местоположения; и
определяют разностную поправку для каждого, по меньшей мере, одного передатчика, входящего в состав первой подсистемы определения местоположения, частично на основе точной оценки местоположения оконечного устройства.
определяют разностную поправку по первому, по меньшей мере, одному передатчику, входящему в состав первой подсистемы определения местоположения, при этом определение разностной поправки содержит:
получение значения фактического измерения, используя первый передатчик, указывающего местоположение оконечного устройства беспроводной связи относительно первого передатчика;
вычисление ожидаемого значения измерения, указывающее местоположение оконечного устройства беспроводной связи относительно первого передатчика, на основе точной оценки местоположения оконечного устройства полученной при использовании второй подсистемы определения местоположения, и местоположение передатчика; и
определение разностной поправки для первого оконечного устройства, используя значение фактического измерения и ожидаемое значение измерения.
периодически, используя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения, определяют точную оценку местоположения оконечного устройства.
по мере необходимости определяют, используя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения, точную оценку местоположения оконечного устройства.
определяют статистические параметры погрешности разностной поправки по каждому передатчику, входящему в состав первой подсистемы определения местоположения.
обновляют статистические параметры погрешности, связанной с разностной поправкой для каждого передатчика, входящего в первую подсистему определения местоположения.
определяют точную оценку местоположения оконечного устройства на основе измеренных псевдодальностей до множества спутников, входящих в состав Глобальной навигационной системы (GPS);
вычисляют ожидаемое значение псевдодальности до каждой из одной или более базовых станций, входящих в состав системы сотовой связи, на основе точной оценки местоположения оконечного устройства и местонахождения базовой станции;
получают измеренную псевдодальность до каждой из одной или более базовых станций;
определяют разностную поправку псевдодальности для каждой из одной или более базовых станций на основе ожидаемого значения псевдодальности и измеренной псевдодальности для этой базовой станции;
получают измеренную псевдодальность по каждому из множества передатчиков, где каждый из множества передатчиков является либо спутником системы GPS, либо базовой станцией;
корректируют измеренную псевдодальность по каждой базовой станции, входящей в это множество передатчиков, на основе разностной поправки псевдодальности, определенной для этой базовой станции; и
определяют обновленную оценку местоположения оконечного устройства на основе множества псевдодальностей по множеству передатчиков, где множество псевдодальностей включает в себя, по меньшей мере, одну скорректированную псевдодальность по, по меньшей мере, одной базовой станции.
определяют оценку местоположения оконечного устройства на основе первой подсистемы определения местоположения, если первая подсистема является доступной;
определяют оценку местоположения оконечного устройства на основе первой и второй подсистем определения местоположения, если первая подсистема является частично доступной, причем измерение по каждому передатчику, входящему во вторую подсистему определения местоположения, и использованному для определения оценки местоположения, корректируют на основе разностной поправки, если таковая имеется, для данного передатчика; и
определяют оценку местоположения оконечного устройства на основе только второй подсистемы определения местоположения, если первая подсистема определения местоположения является недоступной, причем измерение по каждому, по меньшей мере, одному передатчику, входящему во вторую подсистему определения местоположения, и использованному для определения оценки местоположения, корректируют на основе разностной поправки для данного передатчика, при этом
измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком.
отбирают одно или более измерений по передатчикам во второй подсистеме определения местоположения для использования при определении местоположения оконечного устройства.
определяют точную оценку местоположения оконечного устройства, на основе первой подсистемы определения местоположения, причем разностную поправку для каждого из одного или более передатчиков, входящих во вторую подсистему определения местоположения, определяют частично на основе точной оценки местоположения оконечного устройства.
получать точную оценку местоположения оконечного устройства беспроводной связи на основе первой подсистемы определения местоположения, причем первая подсистема определения местоположения является спутниковой навигационной системой (СНС);
определять разностную поправку для каждого из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения, частично на основе точной оценки местоположения оконечного устройства, причем вторая подсистема определения местоположения является системой сотовой связи;
получать измерение по каждому из множества передатчиков, причем множество передатчиков включает в себя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения, причем измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком;
корректировать измерение, полученное по каждому, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения, на основе разностной поправки для этого передатчика; и
определять обновленную оценку местоположения оконечного устройства на основе множества измерений по множеству передатчиков, причем множество измерений включает в себя, по меньшей мере, одно скорректированное измерение по, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения.
программный код для получения точной оценки местоположения оконечного устройства беспроводной связи на основе первой подсистемы определения местоположения, причем первая подсистема определения местоположения является спутниковой навигационной системой (СНС);
программный код для определения разностной поправки для каждого из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения, частично на основе точной оценки местоположения оконечного устройства, причем вторая подсистема определения местоположения является системой сотовой связи;
программный код для получения измерения по каждому из множества передатчиков, причем измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком, а множество передатчиков включает в себя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения;
программный код для корректировки измерения, полученного по каждому, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения, на основе разностной поправки для этого передатчика; и
программный код для определения обновленной оценки местоположения оконечного устройства на основе множества измерений по множеству передатчиков, причем, множество измерений включает в себя, по меньшей мере, одно скорректированное измерение по, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения.
средства для получения точной оценки местоположения оконечного устройства беспроводной связи на основе первой подсистемы определения местоположения, причем первая подсистема определения местоположения является спутниковой навигационной системой (СНС);
средства для определения разностной поправки для каждого из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения, частично на основе точной оценки местоположения оконечного устройства, причем вторая подсистема определения местоположения является системой сотовой связи;
средства для определения измерения по каждому из множества передатчиков, причем измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком, а множество передатчиков включает в себя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения;
средства для корректировки измерения, полученного по каждому, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения, на основе разностной поправки для этого передатчика; и
средства для определения обновленной оценки местоположения оконечного устройства на основе множества измерений по множеству передатчиков, причем множество измерений включает в себя, по меньшей мере, одно скорректированное измерение по, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения.
средства для определения фактических измерений по каждому из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения; и
средства для вычисления ожидаемого значения измерения по каждому из одного или более передатчиков на основе точной оценки местоположения оконечного устройства и местонахождения передатчика, и при этом разностная поправка для каждого из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения, определяется на основе фактического измерения и ожидаемого значения измерения по этому передатчику.
первый приемник, функция которого состоит в том, чтобы принимать и обрабатывать принятый сигнал таким образом, чтобы предоставлять данные первой подсистеме определения местоположения, причем первая подсистема определения местонахождения является спутниковой навигационной системой (СНС);
второй приемник, функция которого состоит в том, чтобы принимать и обрабатывать принятый сигнал таким образом, чтобы предоставлять данные второй подсистеме определения местоположения, причем вторая подсистема определения местоположения является системой сотовой связи; и
процессор, соединенный с первым и вторым приемниками, функции которого состоят в том, чтобы:
получать точную оценку местоположения оконечного устройства на основе данных для первой подсистемы определения местоположения;
определять разностную поправку для каждого из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения, частично на основе точной оценки местоположения оконечного устройства;
получать фактическое измерение по каждому из множества передатчиков на основе данных для той подсистемы, к которой принадлежит каждый передатчик, причем измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком, а множество передатчиков включает в себя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения;
корректировать фактическое измерение, полученное по каждому, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения, на основе разностной поправки для этого передатчика; и
определять обновленную оценку местоположения оконечного устройства на основе множества измерений по множеству передатчиков, причем множество измерений включает в себя, по меньшей мере, одно скорректированное измерение по, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения.
первый приемник, функция которого состоит в том, чтобы принимать и обрабатывать принятый сигнал таким образом, чтобы предоставлять данные первой подсистеме определения местоположения, причем первая подсистема определения местоположения является спутниковой навигационной системой (СНС);
второй приемник, функция которого состоит в том, чтобы принимать и обрабатывать принятый сигнал таким образом, чтобы предоставлять данные второй подсистеме определения местоположения, причем вторая подсистема определения местонахождения является системой сотовой связи; и
процессор, соединенный с первым и вторым приемниками, функция которого состоит в том, чтобы:
получать точную оценку местоположения оконечного устройства на основе данных для первой подсистемы определения местоположения;
определять разностную поправку для каждого из одного или более передатчиков, входящих в состав второй подсистемы определения местоположения, частично на основе точной оценки местоположения оконечного устройства;
получать фактическое измерение по каждому из множества передатчиков на основе данных для той подсистемы, к которой принадлежит каждый передатчик, причем измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком, а множество передатчиков включает в себя, по меньшей мере, один передатчик, входящий в состав второй подсистемы определения местоположения;
корректировать фактическое измерение по каждому, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения, на основе разностной поправки для этого передатчика; и
определять обновленную оценку местоположения оконечного устройства на основе множества измерений по множеству передатчиков, причем множество измерений включает в себя, по меньшей мере, одно скорректированное измерение по, по меньшей мере, одному передатчику, входящему в состав второй подсистемы определения местоположения.
первый приемник, функция которого состоит в том, чтобы принимать и обрабатывать принятый сигнал таким образом, чтобы предоставлять данные первой подсистеме определения местоположения, причем первая подсистема определения местоположения является спутниковой навигационной системой (СНС);
второй приемник, функция которого состоит в том, чтобы принимать и обрабатывать принятый сигнал таким образом, чтобы предоставлять данные второй подсистеме определения местоположения, причем вторая подсистема определения местоположения является системой сотовой связи; и
процессор, соединенный с первым и вторым приемниками, функция которого состоит в том, чтобы:
определять оценку местоположения оконечного устройства на основе первой подсистемы определения местоположения, если первая подсистема доступна,
определять оценку местоположения оконечного устройства на основе первой и второй подсистем определения местоположения, если первая подсистема определения местоположения частично доступна, причем фактическое измерение по каждому передатчику, входящему во вторую подсистему определения местоположения и использованному для определения оценки местоположения, корректируется на основе разностной поправки, если таковая имеется, для этого передатчика, при этом измерение по каждому передатчику относится к измерению псевдодальности между оконечным устройством и передатчиком; и
определять оценку местоположения оконечного устройства на основе только второй подсистемы определения местоположения, если первая подсистема определения местоположения недоступна, причем фактическое измерение по каждому, по меньшей мере, одному передатчику, входящему во вторую подсистему определения местоположения и использованному для определения оценки местоположения, корректируется на основе разностной поправки для этого передатчика.
| US 5717406 А, 10.02.1998 | |||
| RU 99109462 А, 10.03.2001 | |||
| ЕР 1148344 А, 24.10.2001. |

