Область техники
Настоящее изобретение относится к радионавигационным системам определения местоположения объектов, использующих режим дифференциальной коррекции.
Дифференциальный режим навигационных определений использует комплекс дополнительных средств контроля и коррекции навигационной информации навигационных космических аппаратов (НКА), позволяющих в результате специальной методики наблюдения навигационного космического аппарата (НКА) и последующей математической обработкой повысить точность определения координат потребителей навигационной информации.
Уровень техники
В настоящее время известна спутниковая радионавигационная система под названием "Глобальная система местоопределения" (GPS) или "Navstar" [Navigation (VSA), 1978, v. 25, N2], способствующая определению местонахождения любых объектов-потребителей, оборудованных приемником, чувствительным к радионавигационным сигналам НКА данной системы.
Система "Navstar" содержит 18 НКА по 3 НКА на каждой из шести круговых 12-часовых орбит. Плоскости орбит равномерно смещены относительно друг друга на 60o. Положение каждого спутника в любой момент времени точно известно.
Местоположение объекта-потребителя (долгота, широта и высота) в любой точке на Земле или около Земли может быть определено на основе измерений псевдодальности относительно четырех спутников, находящихся в зоне радиовидимости этого объекта. Последовательные измерения псевдодальности позволяют определить скорость движения мобильного объекта.
Существует также Глобальная спутниковая радионавигационная система, получившая название ГЛОНАСС. Система состоит из 24 НКА, которые равномерно распределены через 45o в 3 орбитальных плоскостях по 8 НКА в каждой плоскости. В каждой плоскости НКА движутся по круговым орбитам высотой ≈ 20000 км с периодом обращения ≈ 12 часов [WO 91/11732 от 08.08.99 (G 01 S 5/14 A1)].
Каждый НКА в вышеперечисленных системах излучает навигационный сигнал (НС), который представляет собой многокомпонентный фазоманипулированный радиосигнал. Передаваемый навигационный сигнал содержит в себе следующие основные информационные компоненты:
- навигационное сообщение, предназначенное для проведения потребителями навигационных определений и планирования сеансов навигации, основное содержание которого включает в себя эфемериды НКА - координаты и параметры движения НКА на фиксированный момент времени, временную шкалу конкретного НКА;
- псевдослучайную последовательность, предназначенную для измерения задержки распространения навигационного сигнала от НКА до потребителя и соответственно определения дальности с высокой точностью.
Для системы ГЛОНАСС отличия в навигационных сигналах, передаваемых конкретным НКА, состоит в том, что каждый из навигационных сигналов сдвинут по частоте по отношению друг к другу, а псевдослучайная последовательность формируется одинаковым образом на всех НКА.
Для системы Navstar отличия в навигационных сигналах, передаваемых конкретным НКА, состоят в том, что каждый из навигационных сигналов промодулирован индивидуальной псевдослучайной последовательностью, а несущая частота передаваемых сообщений для всех НКА одинакова.
В вышеперечисленных спутниковых навигационных системах возможна реализация следующих режимов местоопределения объекта-потребителя навигационной информации:
- штатный режим навигационных определений;
- дифференциальный режим навигационных определений.
Под штатным режимом понимается режим навигационных определений координат потребителей навигационной информации по наблюдениям не менее четырех НКА.
Под дифференциальным режимом понимается режим навигационных определений, в котором потребитель корректирует результаты навигационных определений штатного режима с помощью информации, получаемой от эталонной станции. При этом корректируются погрешности, обусловленные погрешностями эфемерид, уходом шкалы времени, задержкой распространения сигнала в тропосфере. При этом окончательная погрешность местоопределения объекта-потребителя существенно уменьшается [Шебшаевич В.С., Балов А.В., Химулин В.И. Развитие дифференциального метода навигационных определений в спутниковой РНС ГЛОНАСС, Радионавигация и время, РИРВ, 1992].
Наиболее близким аналогом к изобретению по уточнению местоопределения объекта с помощью дифференциальной коррекции является патент US N 5,621,646 от 15 апреля 1997 года.
Пространство дифференциальных поправок формируется на основе НС от не менее 4 НКА системы GPS и сети опорных станций. Каждая из опорных станций принимает сигнал от наблюдаемых НКА на частотах L1 и L2. Любая из опорных станций, принимая НС каждого наблюдаемого НКА, вычисляет остаток (ошибку) псевдодальности, ионосферную задержку навигационного сигнала для каждого НКА и рассогласование бортовых часов НКА и часов опорной станции, получивших название дифференциальной поправки (ДП) дальности между НКА и объектом. Вычисленные ДП, эфемеридные данные, временные поправки и сетка ионосферных поправок по линиям связи передаются на "мастер"-станцию, для всех наблюдаемых НКА со всех опорных станций. "Мастер"-станция передает полученную информацию на геостационарный спутник. Геостационарный спутник переизлучает эти параметры объекту-потребителю, приемники которого принимают информацию с геостационарного спутника и НС от каждого наблюдаемого НКА на частоте LI. Объект-потребитель вычисляет свое местоположение, основанное на принятом навигационном сигнале и дифференциальных поправках, полученных через геостационарный спутник.
Каждая опорная станция включает антенну и приемник навигационного сигнала от НКА (GPS), датчик метеорологических параметров, вычислительный процессор и линию передачи данных.
Антенна и приемник навигационного сигнала опорной станции принимают сигнал от НКА и формируют в цифровой форме информацию для основного процессора, выполняющего действия по сглаживанию вычисленных значений псевдодальности, формированию навигационных данных, тропосферных поправок по распространению навигационного сигнала, остаточную дальность между НКА и опорной станцией, показания часов, а также точно определенное местоположение опорной станции.
Для каждого наблюдаемого НКА опорная станция вычисляет псевдодальность на частотах L1 и L2, остаток формируется с частотой 1 Гц. Это позволяет определить ионосферную задержку и уточнить полученное значение псевдодальности, которое вводится в блок определения остаточной дальности. Приемник навигационного сигнала также дешифрирует навигационные данные, переданные каждым наблюдаемым НКА, которые поступают в навигационный вычислитель, формирующий эфемеридную информацию и разность отставания бортовых часов и часов опорной станции, а полученные результаты вводятся в блок определения остаточной дальности. Туда же заводятся поправки к определению псевдодальности, обусловленные влиянием тропосферы. В блок вычисления остаточной дальности вводится информация о местоположении опорной станции. После соответствующей процедуры обработки полученных данных блок вычисления остаточной дальности формирует для внешнего интерфейса опорной станции значение остаточной дальности между опорной станцией и НКА, координаты местоположения опорной станции и ионосферную поправку на время распространения навигационного сигнала.
В качестве линий связи могут быть использованы телефонные линии связи, оптические и оптико-волоконные линии и иные способы приемо-передачи. Терминалом линии связи является "мастер"-станция, которая осуществляет опрос опорных станций, формирование полученной информации и передачу ее через геостационарный спутник объекту-потребителю.
Аппаратура объекта-потребителя включает приемник корректирующих сообщений, общепринятый приемник, работающий на частоте L1 НС от НКА системы GPS, процессор и дисплей. Процессор состоит из основного процессора, который использует декодированные корректирующие сообщения, скорректированную псевдодальность, псевдодальность, ионосферную и тропосферную поправки, введенные в память процессора. Кроме того, приемник корректирующих сообщений и приемник навигационного сигнала могут быть объединены как единый прибор для приема как корректирующего сообщения, так и навигационного сигнала.
При приеме навигационного сигнала от каждого из НКА приемник формирует значения псевдодальности местоположения объекта, а также направления линии визирования между объектом-потребителем и НКА. Полученные результаты вводятся соответственно в вычислитель псевдодальности, в вычислитель тропосферной коррекции и в вычислитель коррекции псевдодальности.
Корректирующие сигналы, переданные "мастер"-станцией, дешифрируются и передаются в вычислитель ионосферной коррекции, формирующий поправки времени распространения для каждого из наблюдаемых НКА, которые учитываются вычислителем псевдодальности. Учитывая все поправки, вычислитель псевдодальности передает ее окончательное значение вычислителю местоположения объекта-пользователя, которое отображается на экране дисплея.
Однако система, выбранная в качестве аналога, не обеспечивает высокой точности и надежности местоопределения объекта-потребителя из-за меняющегося геометрического фактора для созвездия наблюдаемых НКА и отсутствия контроля передаваемых дифференциальных поправок.
Сущность изобретения
Изобретение направлено на создание такой системы навигационных определений местоположения объекта-потребителя, которая позволяет обеспечить непрерывный мониторинг навигационных полей ГЛОНАСС и GPS, формировать информацию о целостности навигационных данных спутниковой радионавигационной системы ГЛОНАСС и GPS, повысить достоверность местоопределения объекта за счет использования избыточного количества НКА (одновременно используя НКА ГЛОНАСС и GPS), а также за счет введения интегрального контроля формируемых дифференциальных поправок и методов контроля работоспособности аппаратно-программных средств.
Реализуемые технические результаты достигаются тем, что в спутниковую радионавигационную систему определения местоположения объекта, содержащую орбитальную группировку навигационных космических аппаратов (НКА), аппаратуру "n" потребителей и, по крайней мере, одно опорное приемо-передающее (ОПП) устройство, в состав которого входят антенно-фидерное устройство (АФУ), эталонный приемник навигационного сигнала (НС), а также радиомаяк, введена дополнительная орбитальная группировка НКА, устройство интегрального контроля (ИК) и регистратор данных, а в состав ОПП устройства введены коммутатор, блок управления и контроля и последовательно соединенные блок контроля метеоданных, формирователь дифференциальной поправки (ДП) и кодер ДП, причем выход АФУ соединен через коммутатор со входом эталонного приемника ДП, выход которого через формирователь ДП соединен с первым входом блока управления и контроля, выходы которого соединены соответственно с управляющими входами АФУ, коммутатора, эталонного приемника ДП и кодера ДП, выход которого соединен со входом радиомаяка, а устройство ИК выполнено в виде последовательно соединенных первого АФУ и приемника ДП, последовательно соединенных второго АФУ, коммутатора и контрольного приемника НС и последовательно соединенных блока обработки навигационных параметров (НП), блока контроля точности ДП, блока контроля целостности данных, блока управления и имитатора НС, причем другой выход блока целостности данных соединен с соответствующим входом блока управления через блок контроля имитационных параметров, а также интерфейс внешних связей, выходы которого соединены соответственно с соответствующими входами блока управления и блока контроля целостности данных, причем выходы приемника ДП и контрольного приемника НС соединены с соответствующими входами блока обработки НП, другой выход которого соединен с соответствующим входом блока контроля целостности данных, вход имитатора соединен с управляющим входом коммутатора и с соответствующим входом блока управления и контроля ОПП устройства, выход имитатора НС соединен с соответствующими входами коммутатора и коммутатора ОПП устройства, а один из выходов блока контроля целостности данных соединен с соответствующим входом формирователя ДП, кроме того, входы регистратора данных соединены с соответствующими выходами блока управления и контроля и формирователя ДП ОПП устройства и с соответствующим выходом блока контроля целостности данных.
Эталонный приемник и контрольный приемник дифференциальных поправок могут быть выполнены по известным схемам (например, [Proc. GPS-95, Palmsprings, CA, US, Sept. 12-15, 1995, pp. 835-844; Riley S., Howard V., Aardoom E. , Daly P., Silverstrim P. A combined GPS/GLONASS High Precision Receiver for space applications.]
Заявленная система функционирует следующим образом.
Перечень фигур чертежей
Фиг. 1 - структурная схема навигационной системы определения местоположения объекта.
В состав системы входят
1 - орбитальная группировка навигационных космических аппаратов 1 (HKA1)
2 - дополнительная орбитальная группировка навигационных космических аппаратов 2, (НКА2)
3 - аппаратура потребителя, в состав которой входят:
4 - навигационная аппаратура
5 - антенно-фидерное устройство (АФУ)
6 - приемник дифференциальных поправок (ДП)
7 - декодер ДП
8 - устройство ввода ДП
9 - опорное приемо-передающее устройство (ОПП), в состав которого входят:
10 - АФУ
11 - эталонный приемник навигационных сигналов (НС)
12 - формирователь ДП
13 - блок контроля метеорологических данных (МД)
14 - кодер ДП
15 - блок управления и контроля
16 - коммутатор
17 - радиомаяк
18 - устройство интегрального контроля (ИК), в состав которого входят:
19 - первое АФУ
20 - приемник ДП
21 - второе АФУ
22 - контрольный приемник НС
23 - блок обработки навигационных параметров (НП)
24 - коммутатор
25 - блок контроля точности ДП
26 - блок контроля целостности данных (ЦД)
27 - блок управления
28 - имитатор сигналов НКА
29 - блок контроля имитационных параметров (ИП)
30 - интерфейс внешних связей
31 - регистратор данных
32 - контрольно-корректирующая станция (ККС)
33 - резервирующая аппаратура
Сведения, подтверждающие возможность осуществления изобретения.
Возможность осуществления изобретения подтверждается ниже следующим описанием работы спутниковой радионавигационной системы определения местоположения объекта. Навигационный сигнал, излучаемый каждым из наблюдаемых НКА основной или дополнительной орбитальной группировок, принимается одновременно АФУ навигационной аппаратуры 4, а также АФУ 10 ОПП устройства 9 и АФУ 19 и 21 устройства ИК 18, входящих в состав ККС 32 (Фиг. 1).
Контрольно-корректирующая станция (ККС) 32 функционально подразделяется на составные части, основное назначение которых заключается в следующем:
- опорное приемо-передающее устройство (ОПП) 9, которое определяет истинное значение дифференциальных поправок и передает через радиомаяк 17 в эфир информацию о дифференциальных поправках для аппаратуры потребителей 3;
- устройство интегрального контроля (ИК) 18, которое контролирует прохождение через эфир НС наблюдаемых НКА и сигнала дифференциальной поправки, проверяет точность переданного значения ДП путем параллельного решения задачи местоположения ККС 32 с учетом принятой ДП и последующим сравнением с известными координатами ККС 32, кроме того, осуществляет управление режимами работы ККС 32 и проводит ее тестирование с помощью имитатора сигналов НКА 28. Устройство ИК 18 осуществляет связующую функцию с внешними терминалами для передачи и приема от них служебной и технологической информации;
- регистратор данных 31 - регистрирует и хранит основные параметры работы контрольно-корректирующей станции 32;
- резервирующая аппаратура 33 - резервирует полный комплект контрольно-корректирующей станции 32 в "горячем" состоянии;
Вышеперечисленные составные части контрольно-корректирующей станции 32 взаимодействуют между собой следующим образом.
Навигационный сигнал принимается АФУ 10 опорного приемо-передающего устройства 9 и далее в аналоговой форме через коммутатор 16 поступает на эталонный приемник НС 11, где он формируется к виду, удобному для аналого-цифрового преобразования и последующему извлечению навигационной информации, заложенной в сигнале.
Затем навигационные параметры о НКА в цифровой форме транслируются в формирователь ДП 12, где после решения навигационной задачи вычисляется численное значение дифференциальной поправки.
Численные значения дифференциальных поправок транслируются в кодер ДП 14, который преобразует полученную информацию к виду, удобному для передачи радиомаяком 17.
Блок управления и контроля 15, входящий в состав ОПП 9, выполняет функции контроля и управления за режимами работы его функциональных блоков, а именно АФУ 10, коммутатора 16, эталонного приемника НС 11 и кодера ДП 14 в части проверки их работоспособности.
Блок контроля МД 13 измеряет параметры внешней окружающей среды (температуру, давление, скорость и направление ветра, влажность) и, обрабатывая их по специальной методике, вводит в формирователь ДП 12 дополнительную тропосферную поправку.
Устройство ИК 18 имеет два канала приема. По одному из каналов принимается навигационный сигнал от НКА, построение приемной части этого канала повторяет построение опорной приемной части опорного приемо-передающего устройства и приемной части аппаратуры объекта-потребителя и состоит из последовательно соединенных АФУ 21, коммутатора 24 и контрольного приемника навигационных сигналов 22. Результаты измерений, произведенных по этому каналу, в части эфемеридных данных и измерений дальности транслируются в блок обработки навигационных параметров 23, который на основе полученной первичной информации осуществляет определение координат ККС 32 в результате решения навигационных уравнений. Блок обработки навигационных параметров 23 выполняется по известным схемам и алгоритмам работы [например, заявка WO 91/11732 от 08.08.89 (G 01 S 5/14 A1)].
Другой канал устройства ИК 18 воспринимает информацию, переданную радиомаяком 17 ОПП 9 о численных значениях дифференциальных поправок. Иными словами, сигнал радиомаяка 17 воспринимается АФУ 19, затем передается приемнику ДП 20, где аналоговый сигнал преобразуется в цифровой и заводится в блок обработки навигационных параметров 23, который решает навигационную задачу местоопределения с учетом дифференциальных поправок. Далее полученные результаты транслируются в блок контроля целостности навигационных данных 26. Под понятием целостности при использовании спутниковой радионавигационной системы в качестве единственного (основного) навигационного средства понимается способность навигационной системы исключить неверную спутниковую информацию, а следовательно, и конкретные значения дифференциальных поправок из последующей обработки до того, как ошибка в выходных параметрах превысит заданный порог [Report of RTCA Special Committee - 159 on Minimum Aviation System Performance Standarts (MASPS) for Global Positioning]. Иными словами, это такое состояние радионавигационных параметров, определяемых по сигналам НКА и ДП, переданных объекту-потребителю, которое ухудшает точность определения координат и времени объектом-потребителем до значения, превышающего заданный порог ошибки местоположения объекта-потребителя (например, пропадание сигнала от НКА, искаженная структура сигнала, не позволяющая ККС 32 войти в синхронизм с НКА; наличие в навигационном сообщении НКА признака запрета на использование информации от данного НКА, а также сдвиг Бортовой Шкалы Времени (БШВ), дрейф частоты опорного генератора НКА; сход НКА с орбиты; неверная эфемеридная информация и т.п.).
Таким образом, блок контроля целостности данных 26 извлекает из навигационного сообщения блока обработки навигационных параметров 23 информацию о работоспособности НКА, либо может получить аналогичную или иного рода информацию через интерфейс внешних связей 30. Кроме того, этот блок обеспечивает непрерывность слежения за всеми наблюдаемыми НКА орбитальных группировок 1, 2 (ГЛОНАСС и GPS), о чем формирует сообщение в формирователь ДП 12 для объекта-потребителя. Далее, с учетом оценки точности ДП, блок контроля целостности данных 26 формирует сообщение о нормальной работе ККС 32 или о выходе рабочих параметров ККС 32 за пределы допустимых ошибок. Это сообщение адресуется в блок управления 27. Блок контроля точности дифференциальных поправок 25 на основании вычисленного местоопределения в блоке обработки НП 23, полученного значения дифференциальных поправок и значения точного местоположения устройства ИК 18 вычисляет ошибку между истинным значением местоположения устройства ИК 18 и полученного в результате решения навигационного определения по НКА с учетом принятой ДП, которая не должна превысить заданного значения. Процедура проведения контроля точности, опуская излишние подробности, осуществляется следующим образом. Измерив навигационные параметры в ОПП 9, вычисляет корректирующие поправки к прямоугольным геометрическим координатам потребителя или к навигационным параметрам. Соотношения для вычисления поправок имеет вид (1):
а) в координаты потребителя: (1,а)
(1,а)
b) в навигационные параметры (псевдодальность):
Rо = Rвыч - Rизм (1,б)
где  вектор координат ККС 32, вычисленный по транслируемым координатам НКА и измеренным псевдодальностям до не менее 4 НКА;
вектор координат ККС 32, вычисленный по транслируемым координатам НКА и измеренным псевдодальностям до не менее 4 НКА; эталонные координаты ККС 32;
эталонные координаты ККС 32;
Rизм - измеренная ККС 32 псевдодальность для одного и того же НКА;
Rвыч - псевдодальность, вычисленная на ККС 32 по транслируемым координатам НКА и эталонным координатам ККС 32.
Устройство интегрального контроля 18 решает обратную задачу, что следует из соотношения (2): (2,а)
(2,а)
Rик = Rизм - Rо (2,б)
где  вектор координат устройства интегрального контроля 18 с учетом принятых ДП (устройство ИК 18 пространственно совмещено с опорным приемо-передающим устройством 9;
вектор координат устройства интегрального контроля 18 с учетом принятых ДП (устройство ИК 18 пространственно совмещено с опорным приемо-передающим устройством 9; Rизм, Rо - см. выражение (1,а, б).
Rизм, Rо - см. выражение (1,а, б).
Функция контроля точности ДП 25 сводится к вычислению следующих соотношений (3): (3)
(3)
где  - ошибка в определении вектора измеренных координат устройства ИК 18 с учетом дифференциальных поправок.
- ошибка в определении вектора измеренных координат устройства ИК 18 с учетом дифференциальных поправок.
Полученные результаты передаются в блок контроля целостности данных 26, где происходит операция проверки на превышение заданного порога погрешности ε в определении координат.
Блок управления 27 выполняет функции управления ККС 32, которые включают в себя следующее:
- введение ККС 32 в рабочее состояние;
- контроль за состоянием аппаратуры отдельных узлов и блоков;
- переключение резервного комплекта аппаратуры в случае выхода из строя отдельных узлов и блоков, а также в случае сообщения о превышении заданного порога погрешности ε, полученного из блока контроля целостности данных 26;
- управление обменом информации через интерфейс внешний связей 30 и т.д.
Интерфейс внешних связей 30 выполняет связующую роль с внешними источниками сообщений (например, обмен информацией с другими ККС; прием, передача сообщений об отказах НКА; прием сообщений об особых режимах работы ККС).
Для проверки работоспособности контрольно-корректирующей станции 32 в устройство ИК 18 включен имитатор навигационных сигналов 28, который формирует НС от НКА, сигналы которого через коммутатор 16 ОПП 9 и коммутатор 24 устройства интегрального контроля 18 заводятся в соответствующие приемники 11 и 22. Управление коммутатором 24 непосредственно осуществляет блок управления 27, а коммутатором 16 - блок управления и контроля 15. Таким образом, используя сигналы имитатора 28, ККС 32 проводит "мнимый" рабочий цикл, т. е. по заранее известным НС формируется ДП, после чего осуществляется контроль целостности данных, откуда формируется сообщение о численном значении полученных ошибок местоопределения, которое передается в блок контроля имитационных параметров 29, где происходит сравнение исходной ошибки местоопределения ККС 32, заложенной при формировании НС НКА, с полученной ошибкой, и формируется сообщение о выходе или нахождении в заданных пределах полученного значения местоопределения ККС 32. Это сообщение транслируется в блок управления 27, который принимает решение о дальнейшем режиме работы ККС 32.
Имитационный контроль осуществляется циклично при штатной работе контрольно-корректирующей станции 32.
В целях архивации основных рабочих параметров в ККС 32 в опорное приемо-передающее устройство 9 включен регистратор данных 31, который соединен с функциональными блоками 15, 12 и 26.
Аппаратура потребителя 3 включает в себя навигационную аппаратуру 4 и последовательно соединенные функциональные узлы АФУ 5, приемник ДП 6, декодер ДП 7 и устройство ввода ДП 8. Навигационная аппаратура 4 в контексте данного изобретения - это аппаратура, решающая задачу определения местоположения объекта в штатном режиме (что было определено выше) и представляющая собой структурно канал приема навигационного сигнала НКА устройства интегрального контроля ККС 32. Сигнал о дифференциальных поправках принимается АФУ 5 и далее обрабатывается приемником ДП 6. Сигнал приемника ДП 6 передает полученное сообщение на декодер ДП 7, где осуществляется обработка полученного сообщения к виду, удобному для ввода в навигационную аппаратуру 4. Устройство ввода ДП 8 является устройством согласования, которое может иметь различное исполнение и конфигурацию в зависимости от исполнения навигационной аппаратуры 4.
Для специалистов в указанной области и других областей при ознакомлении с настоящим описанием будут ясны другие возможные модификации данного изобретения. Такие модификации могут включать другие известные по предшествующему уровню техники признаки конструкций. Описанный выше вариант системы не исчерпывает все их многообразие, которое можно осуществить в соответствии с нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2004 |
|
RU2248005C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПОГРЕШНОСТЕЙ В СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ | 2000 |
|
RU2175771C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ КООРДИНАТ ОБЪЕКТА С ПРИВЯЗКОЙ К ПРОИЗВОЛЬНОЙ ТОЧКЕ ПРОСТРАНСТВА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2253128C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИУСА ДЕЙСТВИЯ КИНЕМАТИЧЕСКОГО РЕЖИМА РЕАЛЬНОГО ВРЕМЕНИ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ КООРДИНАТ ОБЪЕКТА | 2004 |
|
RU2247406C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
Настоящее изобретение относится к радионавигационным системам определения местоположения объектов, использующих режим дифференциальной коррекции. Возможность осуществления изобретения подтверждается нижеследующим описанием работы спутниковой радионавигационной системы определения местоположения объекта. Навигационный сигнал, излучаемый каждым из наблюдаемых навигационных космических аппаратов основной или дополнительной орбитальной группировок, принимается одновременно антенно-фидерными устройствами навигационной аппаратуры, опорного приемопередающего устройства и устройства интегрального контроля, входящих в состав контрольно-корректирующей станции. Контрольно-корректирующая станция функционально подразделяется на составные части, основное назначение которых заключается в следующем: опорное приемопередающее устройство, которое определяет истинное значение дифференциальных поправок и передает через радиомаяк в эфир информацию о дифференциальных поправках для аппаратуры потребителей; устройство интегрального контроля, которое контролирует прохождение через эфир навигационных сигналов наблюдаемых навигационных космических аппаратов и сигнала дифференциальной поправки, проверяет точность переданного значения дифференциальной поправки путем параллельного решения задачи местоположения контрольно-корректирующей станции с учетом принятой дифференциальной поправки и последующим сравнением с известными координатами контрольно-корректирующей станции, кроме того, осуществляет управление режимами работы контрольно-корректирующей станции и проводит ее тестирование с помощью имитатора сигналов навигационного космического аппарата; регистратор данных регистрирует и хранит основные параметры работы контрольно-корректирующей станции; резервирующая аппаратура резервирует полный комплект контрольно-корректирующей станции в "горячем" состоянии. Технический результат состоит в том, что она позволяет обеспечить непрерывный мониторинг навигационных полей ГЛОНАСС и GPS, формировать информацию о целостности навигационных данных спутниковой радионавигационной системы ГЛОНАСС и GPS, повысить достоверность местоопределения объекта за счет использования избыточного количества навигационных космических аппаратов. 1 ил.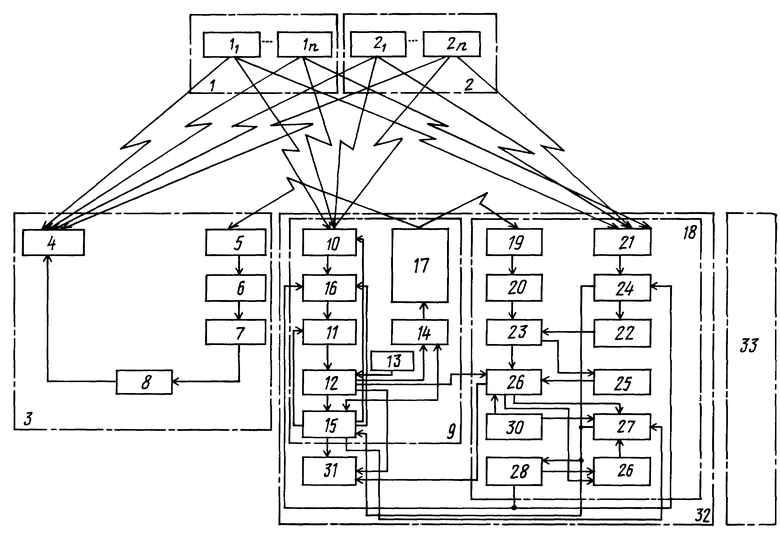
Спутниковая радионавигационная система определения местоположения объекта, содержащая орбитальную группировку навигационных космических аппаратов (НКА), аппаратуру n потребителей и, по крайней мере, одно опорное приемопередающее (ОПП) устройство, в состав которого входят антенно-фидерное устройство (АФУ), эталонный приемник навигационного сигнала (НС), а также радиомаяк, отличающаяся тем, что в нее введены дополнительная орбитальная группировка НКА, устройство интегрального контроля (ИК) и регистратор данных, а в состав ОПП устройства введены коммутатор, блок управления и контроля и последовательно соединенные блок контроля метеоданных, формирователь дифференциальной поправки (ДП) и кодер ДП, причем выход АФУ соединен через коммутатор со входом эталонного приемника ДП, выход которого через формирователь ДП соединен с первым входом блока управления и контроля, выходы которого соединены соответственно с управляющими входами АФУ, коммутатора, приемника ДП и кодера ДП, выход которого соединен со входом радиомаяка, а устройство ИК выполнено в виде последовательно соединенных первого АФУ и приемника ДП, последовательно соединенных второго АФУ, коммутатора и контрольного приемника НС и последовательно соединенных блока обработки навигационных параметров (НП), блока контроля точности ДП, блока контроля целостности данных, блока управления и имитатора НС, причем другой выход блока контроля целостности данных соединен с соответствующим входом блока управления через блок контроля имитационных параметров, а также интерфейс внешних связей, выходы которого соединены соответственно с соответствующими входами блока управления и блока контроля целостности данных, причем выходы приемника ДП и контрольного приемника НС соединены с соответствующими входами блока обработки НП, другой выход которого соединен с соответствующим входом блока контроля целостности данных, вход имитатора соединен с управляющим входом коммутатора и с соответствующим входом блока управления и контроля ОПП устройства, выход имитатора НС соединен с соответствующими входами коммутатора и коммутатора ОПП устройства, а один из выходов блока контроля целостности данных соединен с соответствующим входом формирователя ДП, кроме того, входы регистратора данных соединены с соответствующими выходами блока управления и контроля и формирователя ДП ОПП устройства и с соответствующим выходом блока контроля целостности данных.
| US 5621646 А, 15.04.1997 | |||
| СПОСОБ ГРУППОВОЙ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2130622C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
| US 5585800 A, 17.12.1996 | |||
| US 5644318 А, 01.07.1997 | |||
| Огнетушитель | 0 |
|
SU91A1 |

