Изобретение относится к области воздухоплавания, а именно к летательным аппаратам, движение которых основано на законах электродинамики, в частности, действующих при приложении к аппаратам профилированного электрического поля, и может быть использовано в технике видео, ауди и метеонаблюдениях при ликвидации чрезвычайных ситуаций, катастроф, стихийных бедствий и других аномалий, а также в других отраслях.
Известны электродинамические аппараты, содержащие высоковольтный источник электрического напряжения, два электрода, один из которых выполнен в виде прямолинейного тонкого стержня, другой - в виде системы, состоящей из отдельных элементов, соединенных между собой электрически, диэлектрический каркас с соединительными узлами, через которые крепятся электроды к каркасу, оба электрода соединены с электрическими клеммами источника соответственно [патенты США №2949550, НКИ 310-5, запатентован 16.08.60 и №3187206, НКИ 310-5, запатентован 01.06.65].
Новым явлением, используемым в этих аппаратах, является то, что впервые была подтверждена возможность создания усилия тяги, приводящего в движение аппарат, за счет создания электростатического потенциала между двумя электродами определенной конфигурации. Чем больше габариты аппаратов, в частности площади отрицательного электрода, представляющих собой совокупность элементов, собранных в систему, тем больше усилие тяги. Недостатком таких аппаратов следует считать невозможность управления их движением, ориентации направления движения и стабилизации положения аппаратов в пространстве.
Наиболее близким и современным техническим решением к заявляемому представляется электродинамический аппарат, содержащий источник электрического напряжения, два расположенных друг над другом электрода и диэлектрический каркас с соединительными узлами, через которые крепятся электроды к каркасу, при этом первый электрод выполнен в виде одного или нескольких жестко скрепленных параллельных стержней, например проволоки, лежащих в единой плоскости, а второй электрод - в виде объемной прямоугольной рамки, собранной из электрически соединенных плоских граней из фольги, лежащих в плоскостях, параллельных продольной оси симметрии аппарата, причем кромки граней второго электрода, обращенные в сторону первого электрода, закруглены, клеммы источника электрического напряжения соединены с первым и вторым электродами [действующие макеты аппарата демонстрировались: 1-й макет на Общероссийском образовательном форуме в апреле 2006 г. в Сокольниках, г.Москва, 2-й макет на научно-техническом творчестве молодежи 2006 г. в ВВЦ г.Москва].
Эти макеты электродинамического аппарата созданы заявителем. Масса этих макетов не превышает 7...8 грамм, а полезный груз может достигать 9...11 грамм. Недостатком этих технических решений является отсутствие возможности управления траекторией перемещения (полета) аппарата в пространстве.
Сущность изобретения заключается в том, что в электродинамический аппарат, содержащий источник электрического напряжения, два расположенных друг над другом электрода и диэлектрический каркас с соединительными узлами, через которые крепятся электроды к каркасу, при этом первый электрод выполнен в виде одного или нескольких жестко скрепленных параллельных стержней, лежащих в единой плоскости, а второй электрод - в виде геометрической фигуры, например объемной рамки, собранной из электрически соединенных плоских n граней, лежащих в плоскостях, параллельных вертикальной оси симметрии аппарата, причем кромки граней второго электрода, обращенные в сторону первого электрода, снабжены диэлектрическими трубками, закруглены вокруг трубок, клеммы источника электрического напряжения соединены с первым и вторым электродами, введены защитная оболочка из диэлектрического материала и радиоуправляемый электромеханический привод, состоящий из рулевых n машинок, установленных в соединительных узлах каркаса, при этом n грани второго электрода выполнены автономными друг от друга с возможностью принудительного поворота каждой из граней посредством рулевых n машинок привода вокруг осей, проходящих вдоль отверстий диэлектрических трубок, причем продольные размеры граней выполнены меньшими, чем продольные размеры объемной рамки с тем, чтобы был обеспечен беспрепятственный поворот каждой грани относительно оси, проходящей вдоль отверстия трубки, как раздельно, так и совместно, на угол не менее ±15° от вертикального положения грани, n - грани второго электрода связаны с соединительными узлами через механические полуоси, одни концы которых жестко закреплены в отверстиях диэлектрических трубок граней, другие концы шарнирно - в соединительных узлах, а одна из полуосей каждой грани кинематически связана с одной из рулевых n машинок, источник электрического напряжения выполнен радиоуправляемым, оболочка закреплена на каркасе аппарата и ее полость заполнена инертным газом.
Положительным результатом изобретения является обеспечение заданной ориентации, стабилизации и управления траекторией движения аппарата в пространстве (горизонтальном, вертикальном и наклонном направлениях) за счет обеспечения профилированного электрического поля, достигаемого взаимной подвижностью граней второго электрода.
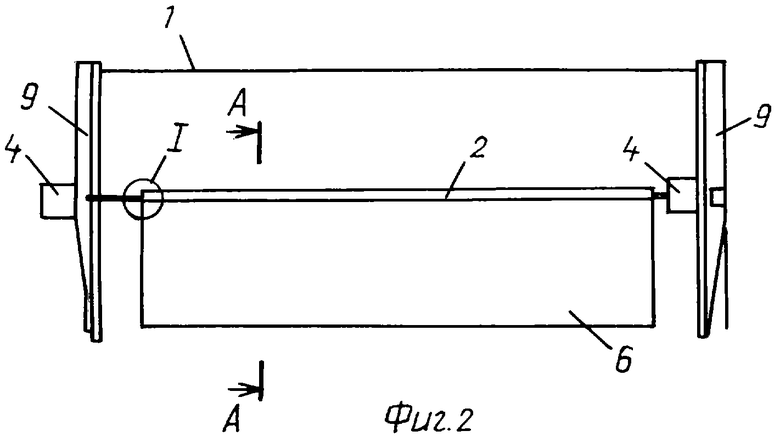
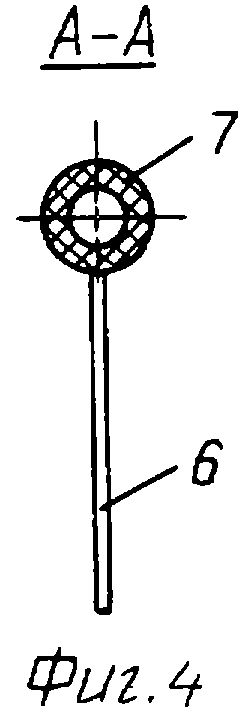
На фиг.1 показан вид аппарата в аксонометрии; на фиг.2 - вид аппарата спереди без оболочки; на фиг.3 - элемент I фиг.2 крепления грани второго электрода к соединительному узлу каркаса через полуось; на фиг.4 - грань второго электрода по сечению А-А фиг.2.
Электродинамический аппарат содержит источник электрического напряжения (на фигурах не показан), два расположенных друг над другом электрода 1 и 2, диэлектрическую оболочку 3, диэлектрический каркас с соединительными узлами 4 и диэлектрическими стойками 9 для крепления к ним элементов аппарата, в частности электродов 1 и 2, и радиоуправляемый электромеханический привод, состоящий из рулевых л машинок 5, установленных в соединительных узлах 4 каркаса.
Первый электрод 1 (фиг.1) выполнен в виде одного или нескольких жестко скрепленных параллельных стержней, лежащих в единой плоскости, а второй электрод 2 - в виде геометрической фигуры, например объемной рамки, собранной из электрически соединенных плоских n граней 6 (в данном случае n=4), лежащих в плоскостях, параллельных продольной оси O-O симметрии аппарата, проходящей через электроды 1 и 2, причем кромки граней 6 второго электрода 2, обращенные в сторону первого электрода 1, снабжены диэлектрическими трубками 7, вокруг которых кромки закруглены (фиг.4), а клеммы источника электрического напряжения соединены с первым и вторым электродами 1 и 2. Грани 6 второго электрода 2 выполнены автономными друг от друга с возможностью принудительного поворота каждой из граней посредством рулевых n машинок 5 привода вокруг осей, проходящих вдоль закругленных кромок (фиг.4) граней второго электрода 2, причем продольные размеры граней 6 выполнены меньшими, чем продольные размеры сторон объемной рамки с тем, чтобы был обеспечен беспрепятственный поворот плоским граням 6 как раздельно, так и совместно. Беспрепятственно - значит без задевания друг друга. Грани 6 поворачиваются относительно своих вертикальных плоскостей вокруг осей, проходящих через отверстия диэлектрических трубок 7, на угол не менее ±15°. Все подвижные грани 6 второго электрода 2 связаны с соединительными узлами 4 каркаса через механические полуоси 8, одни концы которых, входящие в отверстия трубок 7, жестко связаны с трубками 7, а другие концы полуосей 8 шарнирно закреплены в соединительных узлах 4, в которых размещены рулевые машинки 5. Одна из полуосей 8 каждой грани 6 кинематически, например, через зубчатую пару связана с одной из рулевых машинок 5.
Источник электрического напряжения и радиоуправляемый электромеханический привод выполнены радиоуправляемыми, а оболочка выполнена в виде шара, тора или другой конструкции, полость которой заполнена инертным газом, например аргоном, гелием. Оболочка закреплена на каркасе и служит одновременно механическим экраном аппарату и средством, обеспечивающим увеличение полезного груза. Объем полости (инертного газа) должен быть таким, чтобы аппарат вопреки воздушным шарам был легко управляемым оператором с наземного пульта управления.
Величина прилагаемого напряжения на клеммы электродов измеряется единицами тысяч вольт и зависит от размеров и массы аппарата. Скорость движения аппарата в горизонтальном направлении определяется величиной угла отклонения граней от их вертикального (начального) положения, а подъемная сила аппарата определяется в основном величиной приложенного напряжения к клеммам электродов.
Работает аппарат следующим образом.
Заправляют аппарат электрической энергией, загружают полезный груз и наполняют полость оболочки инертным газом. Радиоуправляемым устройством с пункта управления полетом проверяют способность граней второго электрода отклоняться как раздельно, так и совместно относительно своих начальных положений.
После проведенного теста принимают решение о старте аппарата. Для этого создают между электродами электрическое поле путем подачи на клеммы электродов электростатического напряжения величиной, определяемой габаритами и массой аппарата. При подаче на электроды напряжения аппарат при начальном положении граней поднимается вертикально вверх.
Для обеспечения движения по наклонной траектории вверх отклоняют две противоположные грани второго электрода в одну сторону и увеличивают подъемную силу, т.е. увеличивают напряжение на клеммах электродов.
Для обеспечения движения по наклонной траектории вниз две противоположные грани оставляют в прежнем положении, но уменьшают подъемную силу, т.е. уменьшают напряжение.
Для обеспечения прямолинейного движения в горизонтальной плоскости отклоняют две противоположные грани в одну сторону, а движения в противоположную сторону отклоняют те же грани в противоположном направлении.
При горизонтальном движении в перпендикулярном направлении описанным выше способом отклоняют две другие противоположные грани. Если отклоняют одновременно все грани, причем две смежные вовнутрь, а противоположные им грани - наружу, то аппарат будет перемещаться по диагонали.
При движении аппарата в противоположном диагональном направлении знаки углов отклонения граней изменяют на противоположные. Все остальные комбинации управления траекторией движения аппарата следуют из приведенных выше действий.
Положительным результатом изобретения является обеспечение заданной ориентации, стабилизации и управления траекторией движения аппарата в пространстве (горизонтальном, вертикальном и наклонном направлениях) за счет обеспечения профилированного электрического поля, достигаемого взаимной подвижностью граней второго электрода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КУРСОМ ПОЛЕТА ЭЛЕКТРОДИНАМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2328383C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| АЭРОВИНТОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ СОЛНЕЧНОЙ РАДИАЦИИ В ГАЗ ОЗОН И ИСПОЛЬЗОВАНИЕ ПРЕИМУЩЕСТВЕННО ДЛЯ "ШТОПАНИЯ" ОЗОНОВОЙ ДЫРЫ В ЗАЩИТНОМ СЛОЕ АТМОСФЕРЫ | 1996 |
|
RU2127499C1 |
| ГЕНЕРАТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ПОЛЯ | 2001 |
|
RU2268542C2 |
| Высокоресурсная металлокерамическая рентгеновская трубка | 2019 |
|
RU2716261C1 |
| СИСТЕМА ЭНЕРГООБЕСПЕЧЕНИЯ ЛЕТАТЕЛЬНЫХ ЭЛЕКТРОДИНАМИЧЕСКИХ АППАРАТОВ | 2007 |
|
RU2335061C1 |
| Подводный аппарат | 2018 |
|
RU2696733C1 |
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ ЛЕТАТЕЛЬНЫХ ЭЛЕКТРОДИНАМИЧЕСКИХ АППАРАТОВ | 2007 |
|
RU2335060C1 |
| СОЕДИНИТЕЛЬНЫЙ ЭЛЕКТРОД В ВИДЕ СТЕРЖНЯ С ПЛОСКОЙ КОНТАКТНОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2479083C2 |
| ПОДКЛЮЧАЕМОЕ ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ ЭЛЕТРИЧЕСКОГО ТОКА, ИМЕЮЩЕЕ УСОВЕРШЕНСТВОВАННУЮ ЗАДНЮЮ ПАНЕЛЬ | 2017 |
|
RU2731882C2 |

Изобретение относится к области воздухоплавания, а именно к летательным аппаратам, действующим при приложении к ним профилированного электрического поля, и может быть использовано в аудио- и видеотехнике, в метеонаблюдениях, при ликвидации чрезвычайных ситуаций, катастроф, стихийных бедствий и т.д. Предлагаемый аппарат содержит источник электрического напряжения, два расположенных друг над другом электрода и диэлектрический каркас с соединительными узлами для крепления электродов к каркасу. Первый электрод выполнен в виде одного или нескольких жестко скрепленных параллельных стержней, лежащих в единой плоскости. Второй электрод выполнен в виде объемной рамки, собранной из электрически соединенных плоских граней. В вертикальном положении эти грани лежат в плоскостях, параллельных вертикальной оси симметрии аппарата. Кромки граней второго электрода, обращенные в сторону первого электрода, снабжены диэлектрическими трубками. Аппарат снабжен защитной оболочкой из диэлектрического материала, заполняемой инертным газом, и радиоуправляемым электромеханическим приводом в виде n рулевых машинок, установленных в соединительных узлах каркаса. Рулевые машинки служат для поворота граней вокруг осей, проходящих вдоль отверстий диэлектрических трубок. Грани могут поворачиваться, независимо друг от друга или совместно, на угол не менее ±15° от их вертикального положения. Техническим результатом изобретения является обеспечение заданных ориентации, стабилизации и управления траекторией движения летательного аппарата в пространстве (в горизонтальном, вертикальном и наклонном направлениях). 4 ил.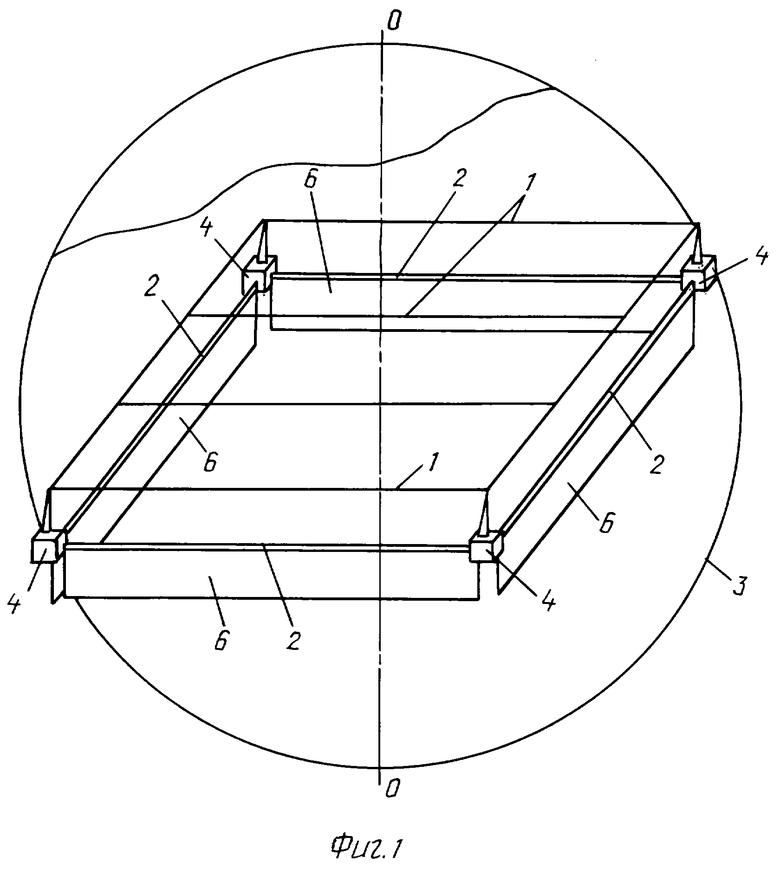
Электродинамический аппарат, содержащий источник электрического напряжения, два расположенных друг над другом электрода и диэлектрический каркас с соединительными узлами, через которые крепятся электроды к каркасу, при этом первый электрод выполнен в виде одного или нескольких жестко скрепленных параллельных стержней, лежащих в единой плоскости, а второй электрод - в виде геометрической фигуры, например объемной рамки, собранной из электрически соединенных n плоских граней, в вертикальном положении лежащих в плоскостях, параллельных вертикальной оси симметрии аппарата, причем кромки граней второго электрода, обращенные в сторону первого электрода, снабжены диэлектрическими трубками, вокруг которых кромки закруглены, клеммы источника электрического напряжения соединены с первым и вторым электродами, отличающийся тем, что в аппарат введены защитная оболочка из диэлектрического материала и радиоуправляемый электромеханический привод, состоящий из n рулевых машинок, установленных в соединительных узлах каркаса, при этом грани второго электрода выполнены автономными с возможностью принудительного поворота каждой из них посредством рулевых машинок привода вокруг осей, проходящих вдоль отверстий диэлектрических трубок, причем продольные размеры граней выполнены меньшими, чем продольные размеры объемной рамки так, чтобы обеспечить беспрепятственный поворот каждой грани относительно оси, проходящей вдоль отверстия трубки, как отдельно, так и совместно с другими гранями, на угол не менее ±15° от вертикального положения граней, при этом указанные грани связаны с рулевыми машинками через механические полуоси, одни концы которых жестко закреплены в отверстиях указанных диэлектрических трубок, а другие концы шарнирно закреплены в соединительных узлах, причем одна из полуосей каждой грани кинематически связана с одной из рулевых машинок, источник электрического напряжения выполнен радиоуправляемым, оболочка закреплена на каркасе и ее полость заполнена инертным газом.
| Действующий макет аппарата, показанный на VI Всероссийской выставке научно-технического творчества молодежи | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| FR 1003484 А, 18.03.1952 | |||
| US 3071705 A, 01.01.1963 | |||
| US 2949550 А, 16.08.1960 | |||
| US 3187206 А, 01.06.1965 | |||
| ГЕНЕРАТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ПОЛЯ | 2001 |
|
RU2268542C2 |
| ТАММ И.Е | |||
| Основы теории электричества | |||
| Изд | |||
| седьмое | |||
| Гостехиздат | |||
| Способ предохранения аэростатов и дирижаблей от атмосферных разрядов | 1925 |
|
SU1957A1 |

