Изобретение относится к области воздухоплавания, а именно к технологии управления курсом, креном и тангажом летательного аппарата, движение которого основано на законах электродинамики, в частности действующих при приложении к аппаратам профилированного электрического поля, и может быть использовано в технике видео, ауди и метеонаблюдениях при ликвидации чрезвычайных ситуаций, катастроф, стихийных бедствий и других аномалий, а также в других отраслях.
Известны способы управления полетом электродинамических аппаратов, заключающиеся в том, что внутри аппарата создают электрическое поле между электродами путем приложения к их клеммам электрического напряжения, при этом электроды располагают друг над другом вдоль оси симметрии аппарата, а отрицательный электрод выполняют в форме многоугольной фигуры, состоящей из n плоских граней [патенты США №2949550, НКИ 310-5, запатентован 16.08.60 г.и №3187206, НКИ 310-5, запатентован 01.06.65, аналоги прилагаются].
Новым явлением, используемым в этих аппаратах, является то, что впервые была подтверждена возможность создания усилия тяги, приводящего в движение аппарат, за счет создания электростатического потенциала между двумя электродами определенной конфигурации. Чем больше габариты аппаратов, в частности площади отрицательного электрода, представляющих собой совокупность элементов, собранных в систему, тем больше усилие тяги. Недостатком таких аппаратов следует считать невозможность управления их движением, ориентации направления движения и стабилизации положения аппаратов в пространстве.
Наиболее близким и современным техническим решением к заявляемому представляется способ управления полетом электродинамического аппарата, заключающийся в том, что внутри аппарата создают электрическое поле между электродами путем приложения к их клеммам электрического напряжения, при этом электроды располагают друг над другом вдоль оси симметрии аппарата, а отрицательный электрод выполняют в форме многоугольной фигуры, состоящей из n плоских граней, кромки которых, обращенные в сторону положительного электрода, по всей длине грани закругляют, причем грани своими плоскостями ориентируют параллельно оси симметрии (прилагаются снимки действующих макетов аппарата, которые демонстрировались: 1-й макет на Общероссийском образовательном форуме в апреле 2006 г. в Сокольниках, Москва; 2-й макет на Выставке научно-технического творчества молодежи 2006 г. в ВВЦ, Москва).
Представленный способ управления курсом полета электродинамического аппарата разработан заявителем. Масса действующих макетов не превышает 7...8 г, а полезный груз может достигать 9...11 г. Недостатком этого технического решения являются ограниченные возможности управления полетом только воспроизведением вертикального подъема аппарата и отсутствие возможности управления траекторией полета в других направлениях.
Техническим результатом изобретения является обеспечение заданных ориентации, стабилизации и управления траекторией движения аппарата (в горизонтальном, вертикальном и наклонном направлениях) в условиях воздействия термодинамических возмущений окружающей среды, за счет обеспечения профилированного электрического поля, достигаемого взаимной подвижностью граней второго (отрицательного) электрода.
Сущность изобретения заключается в том, что внутри аппарата создают электрическое поле между электродами путем приложения к их клеммам электрического напряжения, при этом электроды располагают друг над другом вдоль продольной оси симметрии аппарата, отрицательный электрод выполняют в форме многоугольной в плане фигуры, состоящей из n плоских граней, кромки которых, обращенные в сторону положительного электрода, по всей длине грани закругляют, причем в вертикальном положении грани своими плоскостями ориентируют параллельно указанной оси симметрии, причем для обеспечения движения в заданном направлении, а также вращения и ориентации аппарата относительно указанной оси его симметрии плоские грани отрицательного электрода принудительно отклоняют как раздельно, так и совместно относительно своих осей, проходящих вдоль закругленных кромок, на угол не менее ±15° от вертикального положения граней.
Кроме того, в предпочтительном варианте отклоняют указанные грани внутрь или наружу на углы, зависящие от внешнего воздействия окружающей среды, одновременно изменяя напряжение электрического питания электродов.
На чертеже показан общий вид аппарата, на котором реализуется способ.
Способ управления курсом полета электродинамического аппарата, заключающийся в том, что внутри аппарата создают электрическое поле между электродами 1 и 2 путем приложения к их клеммам электрического напряжения, при этом электроды 1 и 2 располагают друг над другом вдоль оси O-O симметрии аппарата, а отрицательный электрод 2 выполняют в форме многоугольной в плане фигуры. В варианте исполнения может быть предусмотрена диэлектрическая оболочка 3, наполняемая инертным газом.
Электрод 2 состоит из n плоских граней 6, кромки которых, обращенные в сторону положительного электрода 1, по всей длине грани закругляют. Грани 6 своими плоскостями в вертикальном положении ориентируют параллельно оси O-O симметрии и принудительно отклоняют как раздельно, так и совместно относительно своих осей, проходящих вдоль закругленных кромок, на угол не менее ±15°, а так же вращают аппарат относительно вертикальной оси O-O симметрии.
Электрическое поле между электродами 1 и 2 создают бортовым источником электрического напряжения. Отклонение граней 6 электрода 2 от своих вертикальных (начальных) положений осуществляют относительно оси, проходящей внутри закругленных кромок граней 6, на угол ±15° с помощью радиоуправляемых рулевых машинок 5, которые устанавливают в соединительных узлах 4 каркаса. Грани 6 электрода 2 выполняют автономными друг от друга с возможностью принудительного поворота каждой из граней посредством рулевых машинок 5 привода вокруг осей, проходящих вдоль закругленных кромок граней 6 электрода 2, причем продольные размеры граней 6 выполнены меньшими, чем продольные размеры сторон объемной рамки с тем, чтобы был обеспечен беспрепятственный поворот плоским граням 6 как раздельно, так и совместно.
Количество машинок 5 выбирают равным числу n граней 6. В предложенном фрагменте выбрано n=4. Все элементы аппарата установлены и закреплены на диэлектрическом каркасе. Источник питания, рулевые машинки и каркас на чертеже не показаны. Функцией создания электрического поля, управления работой машинок 5 обеспечивают с наземного пункта по радиоканалу.
Величина прилагаемого напряжения на клеммы электродов измеряется в тысячах вольт и зависит от размеров и массы аппарата. Скорость движения аппарата в горизонтальном направлении определяется величиной угла отклонения граней от их начального положения, а подъемная сила аппарата определяется в основном величиной приложенного напряжения к клеммам электродов.
При воздействии на электродинамический аппарат, согласно изобретению термодинамических возмущений окружающей среды (ветер, давление, температура и влажность), для стабилизации положения аппарата в пространстве необходимо отклонять грани внутрь или в наружу на углы в зависимости от внешнего возмущения окружающей среды и одновременно изменять напряжение электрического питания электродов.
Работает способ следующим образом.
Заправляют аппарат электрической энергией и загружают полезный груз. Радиоуправляемым устройством с пункта управления полетом проверяют способность граней электрода 2 отклоняться как раздельно, так и совместно относительно своих начальных положений.
После проведенного теста принимают решение о старте аппарата. Для этого создают между электродами электрическое поле путем подачи на клеммы электродов электростатического напряжения величиной, определяемой габаритами и массой аппарата. При подаче на электроды напряжения аппарат при начальном положении граней поднимается вертикально вверх.
Для обеспечения движения по наклонной траектории вверх отклоняют две противоположные грани второго электрода в одну сторону и увеличивают подъемную силу, т.е. увеличивают напряжение на клеммах электродов.
Для обеспечения движения по наклонной траектории вниз две противоположные грани оставляют в прежнем положении, но уменьшают подъемную силу, т.е. уменьшают напряжение.
Для обеспечения вращения и ориентации аппарата вокруг вертикальной оси O-O симметрии пару смежных граней отклоняют на одинаковые углы и оставляют другую смежную пару граней неподвижно.
Для обеспечения прямолинейного движения в горизонтальной плоскости отклоняют две противоположные грани в одну сторону, а для движения в противоположную сторону отклоняют те же грани в противоположном направлении.
При горизонтальном движении в перпендикулярном направлении выше описанным отклоняют две другие противоположные грани. Если отклоняют одновременно все грани, причем две смежные во внутрь, а противоположные им грани - наружу, то аппарат будет перемещаться по диагонали.
При движении аппарата в противоположном диагональном направлении знаки углов отклонения граней изменяют на противоположные. Все остальные комбинации управления траекторией движения аппарата следуют из вышеприведенных действий.
Положительным результатом изобретения является обеспечение заданной ориентации, стабилизации и управления траекторией движения аппарата (горизонтальном, вертикальном и наклонном направлениях) в условиях воздействия термодинамических возмущений окружающей среды, за счет обеспечения профилированного электрического поля, достигаемого взаимной подвижностью граней второго электрода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДИНАМИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2328414C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЯГИ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1999 |
|
RU2166667C1 |
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ ЛЕТАТЕЛЬНЫХ ЭЛЕКТРОДИНАМИЧЕСКИХ АППАРАТОВ | 2007 |
|
RU2335060C1 |
| СИСТЕМА ЭНЕРГООБЕСПЕЧЕНИЯ ЛЕТАТЕЛЬНЫХ ЭЛЕКТРОДИНАМИЧЕСКИХ АППАРАТОВ | 2007 |
|
RU2335061C1 |
| ГЕНЕРАТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ПОЛЯ | 2001 |
|
RU2268542C2 |
| Беспилотный летательный аппарат для определения электропроводности почвы | 2024 |
|
RU2829829C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2012 |
|
RU2527798C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ СОЛНЕЧНО-ДИНАМИЧЕСКИХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2102291C1 |
| Устройство для управления пространственнымипАРАМЕТРАМи пучКОВ упРугиХ ВОлН | 1979 |
|
SU808167A1 |
Изобретение относится к области воздухоплавания и может быть использовано в аудио- и видеотехнике, в метеонаблюдениях, при ликвидации чрезвычайных ситуаций, катастроф, стихийных бедствий и т.д. Предлагаемый способ заключается в том, что внутри аппарата создают электрическое поле между электродами путем приложения к их клеммам электрического напряжения. Электроды располагают друг над другом вдоль продольной оси симметрии аппарата. Отрицательный электрод выполняют в форме многоугольной в плане фигуры, состоящей из n плоских граней. Кромки граней, обращенные в сторону положительного электрода, закругляют. Вдоль этих кромок проходят оси вращения граней. В вертикальном (начальном) положении грани своими плоскостями ориентируют параллельно оси симметрии аппарата. Для обеспечения движения в заданном направлении, а также вращения и ориентации аппарата относительно оси его симметрии грани принудительно отклоняют в осях их вращения как раздельно, так и совместно, на угол не менее ±15° от вертикального положения граней. Предпочтительно отклоняют указанные грани внутрь или наружу на углы, зависящие от внешнего воздействия окружающей среды, одновременно изменяя напряжение электрического питания электродов. Техническим результатом изобретения является обеспечение заданной ориентации, стабилизации и управления траекторией движения аппарата (в горизонтальном, вертикальном и наклонном направлениях) в условиях воздействия термодинамических возмущений окружающей среды. 1 з.п. ф-лы, 1 ил.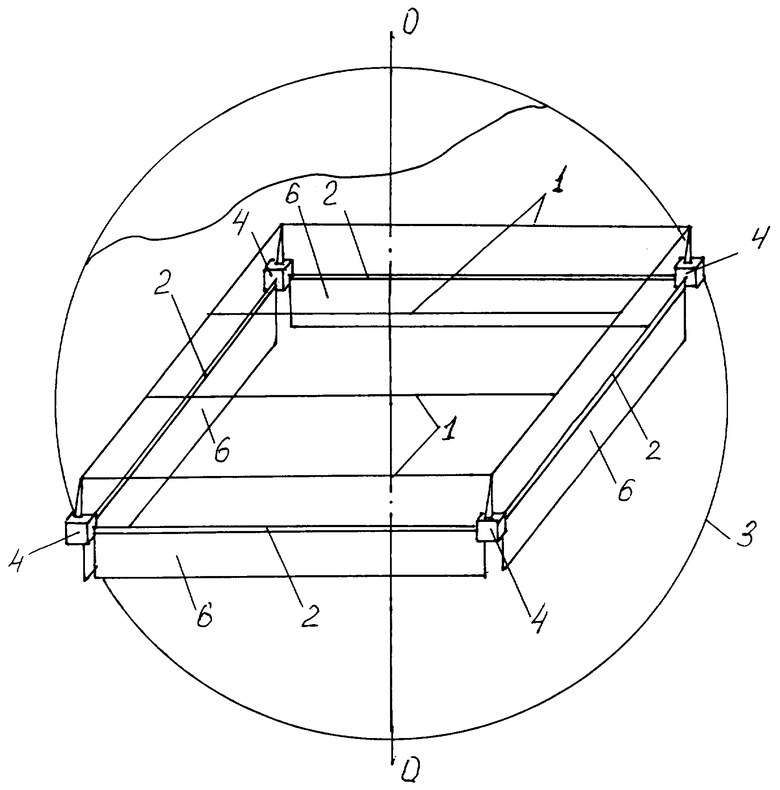
| Действующий макет аппарата, показанный на VI Всероссийской выставке научно-технического творчества молодежи | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| FR 1003484 А, 18.03.1952 | |||
| US 3071705 A, 01.01.1963 | |||
| US 2949550 А, 16.08.1960 | |||
| US 3187206 А, 01.06.1965 | |||
| ГЕНЕРАТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ПОЛЯ | 2001 |
|
RU2268542C2 |
| ТАММ И.Е | |||
| Основы теории электричества | |||
| Изд | |||
| седьмое | |||
| М., Гостехиздат, 1957, | |||

