Изобретение относится к машиностроению и преимущественно к демпфированию колебаний быстровращающихся роторов, турбин, центробежных компрессоров, центрифуг, генераторов, турбомолекулярных насосов, накопителей энергии и подобных устройств.
При разгоне и работе гибких роторов, даже после их балансировки, возникают колебания, которые могут привести к их разрушению.
Теоретически известен способ демпфирования колебаний при помощи действия импульсов силы, направленных противоположно отклонению ротора (Hutte. Справочник для инженеров, изд. 15. Т2, стр.625, 1935 год, М.Л.).
Однако в связи с трудностью осуществления применение этого способа на практике не известно.
Известен магнитный подшипник для решения задачи демпфирования колебаний ротора, содержащий между торцом магнита и торцом вертикального ротора промежуточный радиально подвижный ферромагнитный элемент, а также упругое звено и демпфирующее звено, соединяющие радиально подвижный элемент с корпусом и расположенные вне зазора на периферии подвижного элемента (патент JP №53-25898, F16С 32/04, опубл. 29.07.78).
Однако этот подшипник сложен, имеет большие радиальные габариты и требует сложной настройки всей системы.
Известен также подшипник, содержащий постоянный магнит, закрепленный на вращающемся валу и установленные соосно с ним с зазором внутри него и над ним два постоянных магнита, при этом магниты покрыты немагнитным электропроводным материалом, часть которого находится в радиальном зазоре между магнитами (патент JP №57-97919, F16С 32/ 04, опубл. 28.01.86).
Однако данный подшипник требует сложной взаимной настройки трех магнитов с двумя рабочими зазорами, а демпфирующая способность его незначительна.
Известна также магнитная опора для стабилизации положения тел по трем осям, содержащая на роторе две зоны постоянного магнита, разделенные зазором и расположенные на неподвижных деталях опоры электрические катушки, которые управляются регулятором и системой чувствительных элементов, бесконтактно контролирующих положение подвижной части опоры; кроме того, в магнитном зазоре расположена неподвижная пластина из немагнитного материала с высокой электропроводностью для дополнительного демпфирования за счет поля наводимых в ней вихревых токов (заявка ФРГ № OS 3409047, F16C 32/04, опубл. 19.09.85).
Однако эта опора допускает небольшие окружные скорости, сложна и имеет высокую стоимость из-за электромагнитной системы, что непригодно в серийном производстве.
Наиболее близким к предлагаемому способу является применение для демпфирования колебаний переменно-полюсных муфт вращения, сглаживающих пульсации скорости привода (Л.Б.Гафбург, А.И.Федотов. Проектирование электромагнитных и магнитных механизмов. Справочник. Л.: Машиностроение, Ленинградское отделение, 1980).
Однако недостатком являются небольшие допустимые окружные скорости, необходимость защиты магнитов от агрессивной среды, сложности сборки и незначительный уровень демпфирования, связанный только с пульсацией скорости и биением ротора.
Технический результат изобретения заключается в осуществлении способа демпфирования, упрощении конструкции и повышении ее надежности по сравнению с предыдущим способом, а главное в значительном повышении демпфирующей способности и возможности ее широкой регулировки.
Для этого в способе демпфирования колебаний роторов, включающем уменьшение амплитуды колебаний при помощи приложения импульсов силы, направленных противоположно отклонению ротора, противоположные импульсы силы создают за счет взаимодействия знакопеременного периодически меняющегося в пространстве магнитного, либо электромагнитного поля, источник которого устанавливают неподвижно, а на вращающемся роторе в пределах этого пространства располагают, по крайней мере, один элемент с высокой электропроводностью, включая сверхпроводимость или высокотемпературную проводимость, либо диамагнетик или наоборот источник знакопеременного поля располагают на вращающемся роторе, а элемент с высокой электропроводностью, включая сверхпроводимость, или высокотемпературную проводимость, либо диамагнетик устанавливают неподвижно в пределах пространства демпфирования, а величину импульса взаимодействия регулируют для каждого конкретного случая в зависимости от амплитуды колебаний за счет числа периодов знакопеременного поля и значения магнитного зазора между поверхностями источника магнитного либо электромагнитного поля и элемента с высокой электропроводностью, включая сверхпроводимость или высокотемпературную проводимость, либо диамагнетик, в пределах пространства демпфирования.
Магнитодинамический подшипник-демпфер включает магнитную систему с периодическим знакопеременным магнитным полем на основе постоянного магнита, либо электромагнита с одной стороны, а с другой стороны систему ротора либо статора, выполненную на основе материала с высокой электропроводностью, либо сверхпроводимости, включая сверхтемпературную проводимость, при этом отношение величины периода намагниченности знакопеременного магнитного, либо электромагнитного поля или шага к амплитуде колебаний ротора больше 1 в эквидистантном положении ротора при эксцентриситете, равном 0, а отношение амплитуды колебаний ротора к магнитному зазору меньше 0,8. Дополнительно, число периодов знакопеременного магнитного либо электромагнитного поля нечетно, чтобы обеспечить так называемую «вековую» устойчивость ротора, для чего достаточно, например, зашунтировать два соседних полюса, при этом число периодов знакопеременного магнитного либо электромагнитного поля может быть кратно критическому числу оборотов ротора.
Изобретение поясняется чертежами:
Фиг.1 - продольное сечение магнитодинамического подшипника-демпфера при вертикальном роторе;
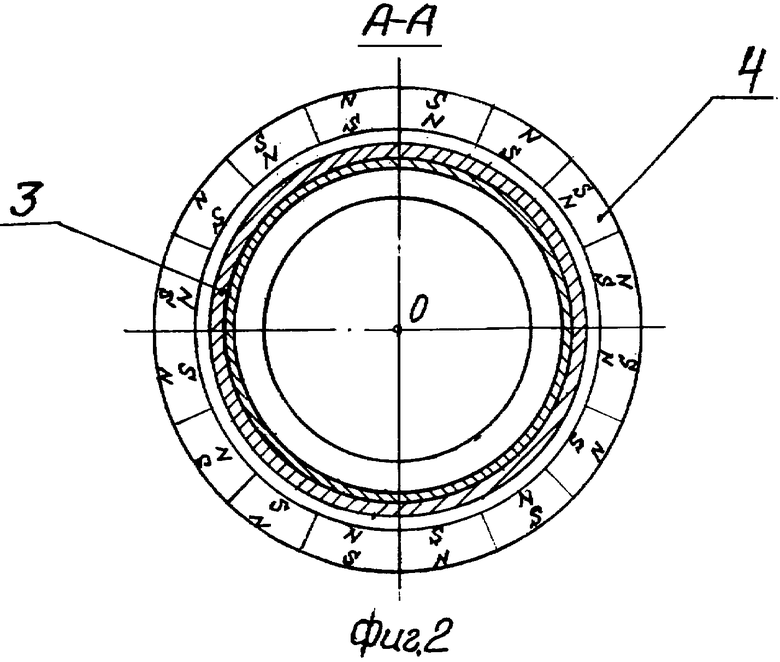
Фиг.2 - сечение А-А фиг.1;
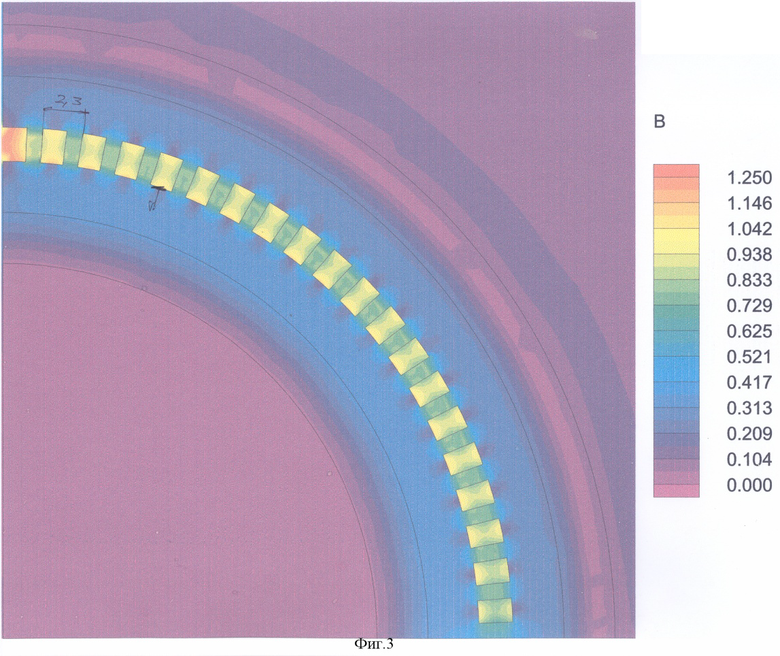
Фиг.3 - распределение индукции в зазоре при постоянном числе полюсов на номинальном числе оборотов;
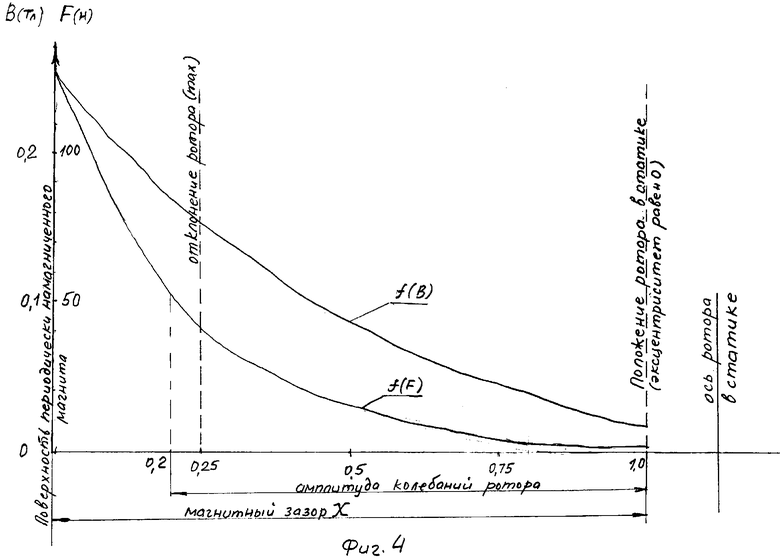
Фиг.4 - распределение импульса силы, рассчитанного по индукции в магнитном зазоре по формуле Максвелла F=B2S/2М0, в зависимости от расстояния от поверхности периодически намагниченного постоянного магнита.
При вертикальном расположении ротора магнитодинамический подшипник-демпфер имеет ферромагнитную цапфу вала 1 ротора 2 и закрепленную на ней втулку 3 из немагнитного материала с высокой электропроводностью, находящуюся внутри кольцевого постоянного магнита 4 с периодическим знакопеременным намагничиванием и соосно с ним. Для фиксации ротора 2 в статике над ферромагнитной цапфой вала 1 на крышке 5 корпуса 6 установлен дополнительный кольцевой магнит 7, который одновременно разгружает нижнюю механическую опору-подпятник 8. При горизонтальном расположении ротора для фиксации первоначального положения в статике необходим дополнительный установочный подшипник.
Магнитодинамический подшипник-демпфер работает следующим образом.
При вращении ротора в зависимости от зазора между периодически намагниченным кольцевым магнитом 4 во втулке 3 возникают вихревые токи, поле которых направлено против отклоняющегося ротора при его колебаниях в квадратичной зависимости от изменения зазора и в пропорциональной зависимости от числа периодов и от числа оборотов ротора. Можно достичь очень больших величин силы импульса, направленного против смещения ротора, и широкой возможности его регулировки. Однако в связи с тем, что возникающее поле мгновенно реагирует на отклонение ротора, когда это отклонение еще незначительно, для возвращения ротора в исходное положение не требуется больших усилий. Так как работа демпфера - это потери, переходящие в тепло, в данном случае можно отрегулировать работу подшипника - демпфера таким образом, что потери мощности будут незначительны, по результатам испытаний менее 5%.
Это достигается подбором числа периодов намагниченности кольцевого постоянного магнита, т.е. величины периода (шага) таким образом, чтобы его отношение к амплитуде колебаний ротора было больше 1 в эквидистантном положении ротора, т.е. при эксцентриситете, равном 0, а при этом отношение амплитуды колебаний ротора к магнитному зазору было меньше 0,8.
При увеличении числа периодов знакопеременного поля магнита пропорционально возрастает поле, наведенное в электроприводном элементе и таким образом можно значительно увеличить импульс силы, воздействующей на колеблющийся ротор, а величину периода довести до величины, сопоставимой с траекторией перемещения, т.е. с амплитудой колебаний ротора, и таким образом увеличить импульс силы в локальном месте и уменьшить потери в остальном зазоре, т.к. чем меньше величина периода намагниченности магнита, тем меньше зона его воздействия, но больше поток в этом локальном месте и таким образом можно уменьшить рабочий зазор без наводимых потерь и еще больше увеличить импульс силы, что достигает наибольшего значения при отношении периода намагниченности магнита к амплитуде колебаний больше 1.
При отношении амплитуды колебаний ротора к магнитному зазору меньше 0,8 крутизна кривой на графике фиг.4 резко уменьшается, за счет чего при работе на этом пологом участке кривой можно уменьшить потери мощности машины. На величину импульса силы оказывает влияние также материал электропроводного элемента (величина его электропроводности) и марка постоянного магнита, но их влияние постоянно, поэтому нами не рассматривается.
Если источник знакопеременного магнитного либо электромагнитного поля располагать на вращающемся валу, а элементы с высокой электропроводностью неподвижно, то график распределения индукции будет зеркальным отражением графика фиг.4.
Для достижения так называемой «вековой» устойчивости ротора число периодов знакопеременного магнитного либо электромагнитного поля должно быть нечетным. Поскольку у магнита всегда два полюса и при намагничивании многополюсного знакопеременного магнита нечетного количества полюсов достичь невозможно, можно, например, зашунтировать два соседних полюса и получить вместо двух полюсов один, т.е. общее нечетное число полюсов.
Предлагаемый способ демпфирования колебаний роторов и устройство, осуществляющее этот способ, - магнитодинамический подшипник-демпфер обеспечивают достижение радиальной жесткости в динамике в десятки килограммов, возможность работы на высоких оборотах, при этом гасятся не только радиальные, но и осевые колебания, т.е. все виды отклонения ротора, при этом значительно упрощается конструкция и сборка машины, что повышает надежность ее работы, а также обеспечивает возможность широкой регулировки демпфирующей способности, что позволяет уменьшить потери мощности (меньше 5%).
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМАЯ МАГНИТОДИНАМИЧЕСКАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2009 |
|
RU2398977C1 |
| МАГНИТОДИНАМИЧЕСКАЯ ОПОРА | 2012 |
|
RU2502899C2 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2015 |
|
RU2585002C1 |
| АДАПТИВНЫЙ ПЕРЕНАЛАЖИВАЕМЫЙ ВЫСОКОТЕМПЕРАТУРНЫЙ СВЕРХПРОВОДНИК | 1992 |
|
RU2140677C1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 1999 |
|
RU2178343C2 |
| ГАЗОВАЯ ЦЕНТРИФУГА | 2015 |
|
RU2638391C2 |
| МАГНИТНЫЙ ПОДШИПНИК | 2002 |
|
RU2237201C2 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2004 |
|
RU2272676C1 |
| ДАТЧИК УСКОРЕНИЯ | 2005 |
|
RU2280876C1 |
| СИСТЕМА НА ГИБРИДНЫХ МАГНИТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2547450C1 |
Изобретение относится к машиностроению и преимущественно к демпфированию колебаний быстровращающихся роторов, турбин, центробежных компрессоров и подобных устройств. Способ демпфирования колебаний роторов заключается в уменьшении амплитуды колебаний при помощи приложения импульсов силы, направленных противоположно отклонению ротора. При этом импульсы силы создают за счет взаимодействия знакопеременного периодически меняющегося в пространстве магнитного либо электромагнитного поля, источник которого устанавливают неподвижно. На роторе в пределах этого пространства располагают, по крайней мере, один элемент с высокой электропроводностью, включая сверхпроводимость или высокотемпературную проводимость, либо диамагнетик. Величину импульса взаимодействия регулируют для каждого конкретного случая в зависимости от амплитуды колебаний за счет числа периодов знакопеременного поля и значения магнитного зазора между поверхностями источника поля и элемента с высокой электропроводностью, включая сверхпроводимость или высокотемпературную проводимость, либо диамагнетик, в пределах пространства демпфирования. Также предложен магнитодинамический подшипник-демпфер, который включает магнитную систему с периодическим знакопеременным магнитным полем на основе постоянного магнита, либо электромагнита с одной стороны, а с другой - систему ротора либо статора, выполненную на основе материала с высокой электропроводностью, либо сверхпроводимости, включая сверхтемпературную проводимость. При этом отношение величины периода намагниченности поля или шага к амплитуде колебаний ротора больше 1 в эквидистантном положении ротора при эксцентриситете, равном 0, а отношение амплитуды колебаний ротора к магнитному зазору меньше 0,8. Технический результат: упрощение конструкции, повышение надежности и повышение демпфирующей способности. 2 н. и 3 з.п. ф-лы, 4 ил.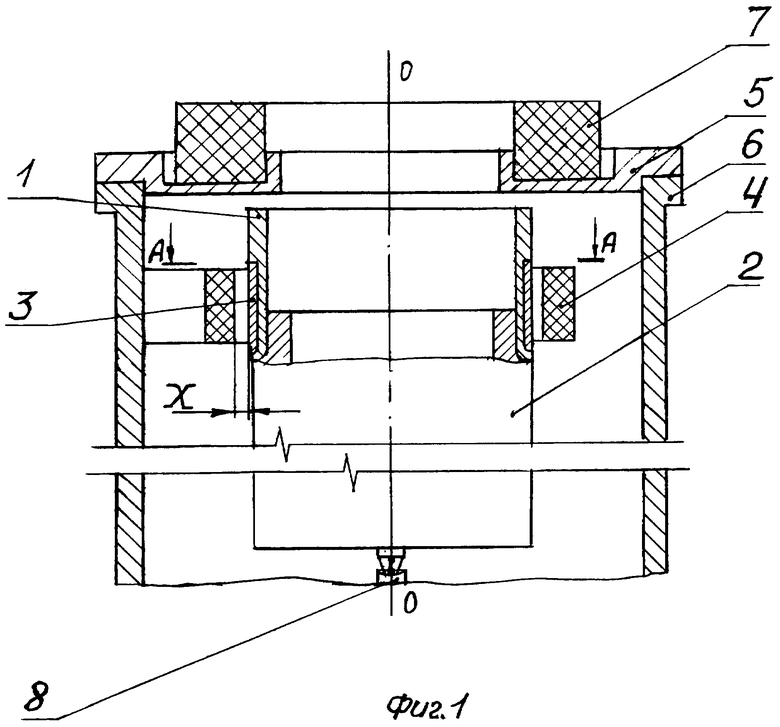
| Магнитная опора для стабилизации положения вала | 1985 |
|
SU1299522A3 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2003 |
|
RU2242287C2 |
| ДЕМПФЕР | 1996 |
|
RU2121088C1 |
| US 2005184609 A1, 25.08.2005 | |||
| US 3289925 A, 06.12.1966. | |||

