Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам мониторинга лифтов и, в частности, к устройству, определяющему степень износа работающей на разрыв системы подвешивания кабины лифта.
Уровень техники
Работающие на разрыв системы подвешивания, такие как стальная лента с покрытием или проволочные канаты, часто используют в лифтовых устройствах для подвешивания кабины лифта в шахте. С течением времени естественный изгиб канатов или тросов, связанный с движением кабины и противовеса, приводит к износу. При таком износе уменьшается поперечное сечение канатов или тросов системы подвешивания, что приводит к снижению их прочности. Поэтому желательно регулярное проведение мониторинга состояния системы подвешивания кабины для определения момента, когда необходимо заменять устройство.
Одним из путей, как можно контролировать состояние каната, является мониторинг электрического параметра, такого как сопротивление, канатов системы подвешивания кабины. Уменьшение площади поперечного сечения каната из-за износа приводит к росту сопротивления каната, что дает теоретическую возможность использовать измерение сопротивления каната в качестве основы для определения прочности каната или его состояния и установить порог сопротивления, при котором должна быть произведена замена системы подвешивания кабины.
Однако флуктуации температуры в шахте лифта будут влиять также на сопротивление каната. Например, температура у верха шахты лифта может быть выше температуры у дна шахты на 10-20°С. Так как электрическое сопротивление также является функцией температуры, изменения сопротивления каната из-за флуктуации температуры могут быть настолько велики, что это делает невозможным определение, насколько велико изменение сопротивления, связанное с флуктуациями температуры, и каково изменение сопротивления, связанное с действительным износом каната. Другими словами, изменения сопротивления, обусловленные температурой, могут маскировать изменения сопротивления, связанные с износом, что делает фактически невозможным правильно связать сопротивление с состоянием каната.
Поэтому желательно иметь устройство мониторинга системы подвешивания кабины лифта, в котором устранено воздействие температурных флуктуаций на параметр, мониторинг которого проводится.
Раскрытие изобретения
Предложено устройство мониторинга системы подвешивания кабины лифта, которое содержит по меньшей мере один датчик температуры, расположенный в шахте лифта, датчик измерений электрического параметра по меньшей мере одной части системы подвешивания кабины, и процессор, являющийся средством преобразования по меньшей мере одного измеренного электрического параметра и электрического параметра по меньшей мере одной части системы подвешивания кабины в первичном состоянии в значения, соответствующие эталонной температуре, и средством учета влияния температуры в шахте лифта, измеряемой указанным по меньшей мере одним датчиком температуры, при этом значение, соответствующее измеренному электрическому параметру, является измеренным значением, а значение, соответствующее электрическому параметру системы подвешивания в первичном состоянии, является эталонным значением, причем процессор установлен с возможностью произведения подсчета разности между измеренным значением и эталонным значением, сравнения величины соответствующей разности с заданным порогом и определения состояния системы подвешивания кабины. При этом процессор может являться средством выполнения подсчета эталонного значения посредством преобразования электрического параметра указанной по меньшей мере одной части системы подвешивания в первичном состоянии, при этом эталонная температура равна температуре в шахте лифта, измеренной указанным по меньшей мере одним датчиком температуры, а измеренное значение равно измеренному электрическому параметру. В другом варианте процессор является средством определения изменения температуры по меньшей мере одного указанного датчика на новую температуру и выполнения пересчета эталонного значения для новой температуры.
В следующем варианте процессор является средством выполнения деления разности между измеренным значением и эталонным значением на эталонное значение с получением относительной величины изменения, являющейся величиной, соответствующей изменению, при этом процессор является средством отображения износа системы подвешивания кабины при превышении относительной величины заданного порога. Величина, соответствующая разности, может представлять собой разность между измеренным значением и эталонным значением, при этом процессор может являться средством отображения износа системы подвешивания кабины при превышении разности установленного порога. В частном случае устройство может содержать группу датчиков температуры, при этом процессор может быть установлен с возможностью произведения подсчета эталонного значения для показаний температуры, полученных от группы датчиков температуры. Датчики в группе датчиков температуры могут быть расположены на одинаковом расстоянии друг от друга вдоль шахты лифта.
Предложен также узел системы подвешивания кабины лифта, содержащий по меньшей мере один датчик температуры, датчик измерений электрического параметра по меньшей мере одной части системы подвешивания кабины лифта, и процессор, который является средством определения температуры, связанной с по меньшей мере одной частью системы подвешивания кабины лифта, по указанному по меньшей мере одному датчику температуры, средством преобразования по меньшей мере одного измеренного электрического параметра и электрического параметра по меньшей мере одной части системы подвешивания кабины в первичном состоянии в значения, соответствующие эталонной температуре, и средством учета влияния температуры в шахте лифта, причем значение, соответствующее измеренному электрическому параметру, является измеренным значением, а значение, соответствующее электрическому параметру системы подвешивания в первичном состоянии, является эталонным значением, при этом процессор является средством выполнения подсчета разности между измеренным значением и эталонным значением и сравнение величины соответствующей разности с заданным порогом и средством определения состояния системы подвешивания кабины. Узел также может дополнительно содержать пользовательский интерфейс, являющийся средством отображения износа системы подвешивания кабины лифта при превышении разности установленного порога. В предпочтительном варианте процессор является средством выполнения подсчета эталонного значения посредством преобразования электрического параметра указанной по меньшей мере одной части системы подвешивания в первичном состоянии, при этом эталонная температура равна температуре в шахте лифта, измеренной указанным по меньшей мере одним датчиком температуры, а измеренное значение равно измеренному электрическому параметру. В другом варианте процессор может являться средством выполнения деления разности между измеренным значением и эталонным значением на эталонное значение с получением относительной величины изменения, являющейся величиной, соответствующей изменению, и средством отображения износа системы подвешивания кабины при превышении относительной величины заданного порога. В частном случае узел может содержать группу датчиков температуры, расположенных на одинаковом расстоянии друг от друга вдоль шахты лифта.
С другом аспекте изобретения раскрыт способ мониторинга системы подвешивания кабины лифта, согласно которому измеряют температуру, связанную с по меньшей мере одной частью системы подвешивания кабины, получают измеренное значение электрического параметра по меньшей мере одной части системы подвешивания кабины, преобразуют по меньшей мере один измеренный электрический параметр и электрический параметр по меньшей мере одной части системы подвешивания кабины в первичном состоянии, учитывают влияние измеренной температуры, причем значение, соответствующее измеренному электрическому параметру, представляет собой измеренное значение, а значение, соответствующее электрическому параметру системы подвешивания в первичном состоянии, представляет собой эталонное значение, осуществляют подсчет разности между измеренным значением и эталонным значением, сравнение величины соответствующей разности с заданным порогом и определяют состояние системы подвешивания кабины. В частном случае, когда система подвешивания кабины содержит несколько частей, определение температуры включает получение ряда значений температуры, причем каждое значение температуры связано с различными частями системы подвешивания кабины, а определение эталонного значения включает преобразование электрического параметра каждой части системы подвешивания в первичном состоянии с учетом температуры этой части и суммирование преобразованных электрических параметров частей системы подвешивания кабины в первичном состоянии. Предпочтительно на стадии преобразования электрических параметров определяют эталонное значение путем преобразования электрического параметра указанной по меньшей мере одной части системы подвешивания кабины в первичном состоянии, при этом эталонная температура равна измеренной температуре, а измеренное значение равно измеренному электрическому параметру. В одном варианте можно дополнительно получать относительное изменение значения на основе эталонного значения, при этом отображают износ системы подвешивания кабины при значении величины относительного изменения, превосходящем заданный порог. В частном случае при определении эталонного значения определяют электрический параметр по меньшей мере части системы подвешивания кабины в определенных условиях для набора температур. Определенные условия могут представлять собой проведение измерений до начала использования системы подвешивания кабины. В частном случае электрическим параметром является сопротивление.
Настоящее изобретение относится к устройству и способу мониторинга состояния системы подвешивания кабины лифта, основанным на измерении электрического параметра, такого как сопротивление системы подвешивания. В одном из вариантов выполнения изобретения производится компенсация влияния температуры на электрический параметр и выделение измеренного электрического параметра таким образом, что он более точно отражает степень износа системы подвешивания, а не ее температуру.
В другом варианте выполнения группой датчиков температуры проводится измерение температуры в различных точках вдоль шахты лифта. Производится подсчет сопротивления системы в первичном состоянии для тех же температурных условий, в которых находится система в процессе мониторинга, и результат вычитается из измеренного сопротивления системы подвешивания кабины, мониторинг состояния которой проводится. Подсчитанная разность отражает изменение сопротивления, связанное с износом системы подвешивания кабины.
Еще в одном варианте выполнения изобретения используется один датчик температуры для выделения влияния износа на сопротивление системы подвешивания кабины. Использование в устройстве одного датчика температуры упрощает расчет сопротивления, связанного с износом. Для еще большего упрощения расчетов и мониторинга значения сопротивлений системы подвешивания кабины в первичном состоянии и системы подвешивания, мониторинг которой проводится, могут быть преобразованы в значения для эталонной температуры.
Краткое описание чертежей
На фиг.1 схематически представлено лифтовое устройство, выполненное в соответствии с одним из вариантов изобретения.
На фиг.2 представлена блок-схема, иллюстрирующая процедуру в соответствии с одним из вариантов выполнения изобретения.
На фиг.3 представлена блок-схема, иллюстрирующая процедуру в соответствии с другим вариантом выполнения изобретения.
На фиг.4 представлена блок-схема, иллюстрирующая процедуру в соответствии с еще одним вариантом выполнения изобретения.
Осуществление изобретения
На Фиг.1 схематически представлено лифтовое устройство 100, выполненное в соответствии с одним из вариантов изобретения. Устройство 100 содержит кабину 102 лифта, подвешиваемую работающей на разрыв системой 104 подвешивания кабины, такой как ленточный канат в шахте лифта. Система 104 подвешивания кабины направляется одним или более шкивами 106. Конфигурация шкивов 106 может быть любой известной из предшествующего уровня техники и пригодной для лифтового устройства 100 (например, с усилием 1:1, 1:2 и т.д.).
Вдоль шахты лифта в вертикальном направлении расположены один или более датчики 108 температуры. В одном из вариантов выполнения изобретения датчики 108 температуры расположены на одинаковом расстоянии в позициях hi, по вертикали вдоль шахты лифта, где Δh есть расстояние между датчиками. Расстояние между датчиками 108 можно изменять, однако при постоянном расстоянии расчет соотношения между сопротивлением и состоянием каната несколько проще. В другом варианте выполнения в шахте 105 лифта может находиться только один датчик 108 вблизи верха шахты 105. Эти датчики 108 температуры используются для компенсации показаний измерения электрических параметров системы 104 подвешивания кабины.
Один или более датчиков 110 измерений электрических параметров измеряют электрические параметры, такие как сопротивление или проводимость, системы 104 подвешивания кабины. Датчики 110 электрических параметров могут быть расположены в любом месте лифтового устройства 100. Хотя в приведенном ниже примере предполагается, что датчики 110 измерений электрических параметров измеряют сопротивление, можно измерять и другие электрические параметры и использовать их в расчетах, не выходя при этом за рамки настоящего изобретения.
Процессор 112 принимает сигналы от датчиков 108 температуры и датчиков 110 сопротивления. На основе данных с датчиков 108 температуры процессор 112 может нормировать данные с датчиков 110 сопротивления, выделяя таким образом изменения, связанные с износом системы 104 подвешивания кабины, и уменьшая или устраняя эффект влияния изменения температуры на значение сопротивления. Через пользовательский интерфейс 113 выдается информация о устройстве 100 в любой воспринимаемой потребителем форме (например, визуальной, звуковой или в обеих вместе).
Если устройство 100 содержит только один датчик 108 температуры, при обработке в процессоре 112 предполагается, что данные о температуре с датчика 108 представляют собой температуру по всей шахте лифта или что полученные данные определяют заранее заданный профиль температуры или ее градиент. Такое предположение является, конечно, приближенным, но оно дает приемлемые результаты.
На Фиг.2 представлена блок-схема, иллюстрирующая способ нормирования данных о сопротивлении в соответствии с одним из вариантов выполнения изобретения. Как известно из предшествующего уровня техники, сопротивление металлического каната изменяется, в основном, линейно в зависимости от температуры, а также от геометрии поперечного сечения каната. Связь между сопротивлением каната и площадью его поперечного сечения выражается, как R=ρL/A, где R - общее сопротивление каната (в Ом), ρ - общее удельное сопротивление материала каната (в Ом·м), L - общая длина каната (в м) и А - площадь поперечного сечения каната (в м2).
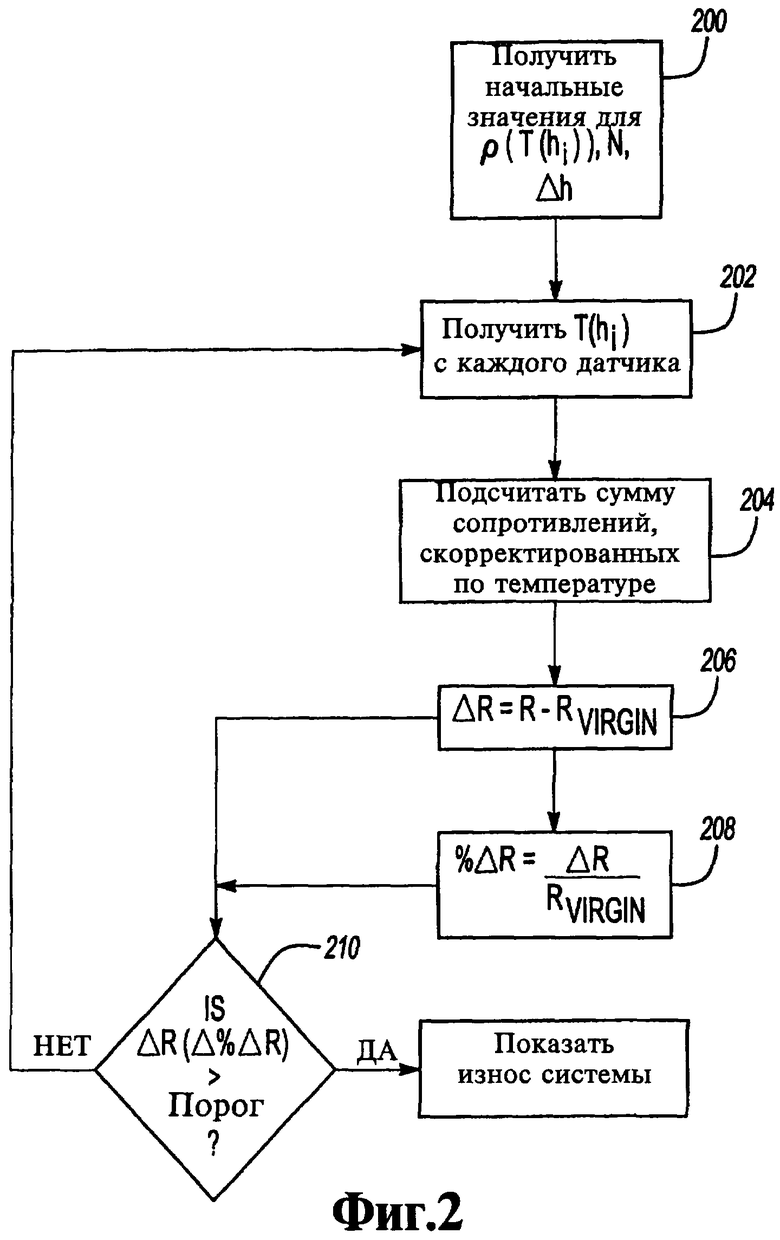
В варианте выполнения изобретения, представленном на Фиг.2, предполагается, что вдоль шахты 105 лифта размещена группа датчиков 108. Перед любой обработкой в память 114, связанную с процессором 112, заносятся начальные данные (блок 200). Эти начальные данные включают сопротивление на единицу длины первичного, не бывшего в употреблении каната и изменение этого сопротивления в зависимости от температуры, количество датчиков 108 в шахте 105 лифта, расстояние hi между всеми датчиками температуры и конфигурацию крепления системы 104 подвешивания кабины в шахте 105 лифта. Хотя сопротивление первичного каната идеально аппроксимируется выражением R=ρL/A, в котором ρ, L и А постоянны, изменения температуры в шахте 105 лифта и изменения износа по длине системы 104 подвешивания кабины приведут к тому, что показания сопротивления по длине системы 104 подвешивания кабины также будут изменяться. В этом случае общее электрическое сопротивление данного каната в системе 104 подвешивания кабины лучше всего аппроксимируется следующим уравнением:

где интегрирование проводится по длине L системы 104 подвешивания кабины.
Таким образом, вычисленное общее сопротивление первичного каната при тех же температурных условиях может быть выражено, как:

Из уравнения 2 можно видеть, что поперечное сечение Avirgin первичного каната полагается постоянным по длине системы 104 подвешивания кабины.
Данные, направляемые в процессор 112 в любой данный момент времени, это показания температуры с датчиков 108 температуры и текущее значение сопротивления каната с датчиков 110 сопротивления. Разница между сопротивлением R каната, определяемым в процессе мониторинга, и сопротивлением Rvirgin первичного каната может быть выражена как:

Следует отметить, что уравнения 1 и 2 определяют общее сопротивление при одинаковых температурных условиях; таким образом, влияние температуры на показания сопротивления R в уравнении 3 устраняется, и в нем отражается только изменение сопротивления из-за износа каната.
Следует также отметить, что в уравнениях с 1 по 3 функция температуры T(z) по высоте шахты лифта полагается непрерывной. В реальности, однако, в шахте лифта будет находиться только конечное число N датчиков 108 температуры, которые в предпочтительном варианте расположены в точках hi на одинаковых расстояниях Δh друг от друга, как показано на фиг.1. Следует отметить, что датчики 108 температуры могут также быть разнесены и на не одинаковые расстояния друг от друга, что не выходит за рамки настоящего изобретения. Таким образом, интеграл в уравнении 3 может быть аппроксимирован суммой, что дает в результате выражение:

в котором сi выбирается в соответствии с любым из известных математических способов аппроксимации интеграла, таким как формула Симпсона или формула трапеций. Как известно, сi может быть равно 1 или 0,5 в зависимости от используемой формулы и значения i (например, если i лежит в диапазоне от 1 до N, сi может быть равно 0,5 в случае использования для аппроксимации по уравнению 4 формулы трапеций). Следует отметить, что в случае неодинакового расстояния между датчиками 108 температуры, специалисту в данной области известно, как преобразовать уравнение 4, чтобы компенсировать эту разницу.
Константа K в уравнении 4 может быть введена для учета некоторой избыточной длины системы подвешивания кабины по сравнению с высотой шахты лифта. Действительная избыточная длина может изменяться в зависимости, например, от конфигурации крепления или высоты лифта. В большинстве случаев влияние константы K пренебережимо, и ее можно опустить, так как избыточная длина составляет малую часть общей длины системы подвешивания кабины. В одном из вариантов выполнения изобретения K равно 1 для конфигурации крепления с одним блоком, и K равно 2 для конфигурации крепления с двумя блоками. Конечно, могут также использоваться и другие значения K.
Таким образом, реализующий вышеуказанные уравнения процессор 112 принимает значения температуры T(hi) с каждого из N датчиков температуры (блок 202), вычисляет сумму в соответствии с уравнением 4 (блок 204) и затем вычитает сумму из измеренного значения R, чтобы получить величину ΔR (блок 206). При желании измеренное значение сопротивления R можно разделить на первичное значение сопротивления Rvirgin, чтобы получить относительное изменение величины сопротивления из-за уменьшения площади поперечного сечения (блок 208). Изменение сопротивления ΔR и/или относительное изменение можно сравнить с пороговой величиной для оценки состояние системы подвешивания кабины (блок 210).
Для упрощения расчетов система датчиков может содержать только один датчик 108 температуры в шахте 105 лифта. В одном из вариантов выполнения изобретения датчик 108 температуры располагается вблизи верха шахты 105 лифта. Так как в этом случае рассматривается только одно значение температуры с датчика, расчет сопротивления может быть упрощен, так что получается:

в котором Н - длина шахты лифта, L - длина системы 104 подвешивания кабины и Т(Н) - измеренная температура в шахте лифта. По сравнению с уравнением 4 значение Н в уравнении 5 может рассматриваться как соответствующее (N-I)dh, и L может рассматриваться как соответствующее КН. Если использовать уравнение 5 для мониторинга состояния системы подвешивания кабины, значения сопротивлений Rvirgin первичной системы при различных температурах Т(Н) могут быть занесены в память в виде таблицы кодов, так что процессор 112 может обращаться к истинному значению величины Rvirgin для вычитания его из показаний сопротивления R для данной температуры Т(Н).
Для преобразования измеренного значения сопротивления R и первичного сопротивления Rvirgin(T(H)) к выбранной эталонной температуре как измеренное сопротивление R, так и первичное сопротивление R(T(H)) можно разделить на величину отношения ρ(Тo)/ρ(Т(Н)), где Тo есть выбранная эталонная температура. Референтная температура То предпочтительно выбирается близкой к комнатной температуре для облегчения получения значения сопротивления R'virgin(To) системы подвешивания кабины в первичном состоянии, используемого процессором 112. Далее, преобразовывая значения R и Rvirgin в соответствующие значения для данной эталонной температуры То, можно оценить состояние системы подвешивания кабины с использованием одного значения Rvirgin и одного значения порога сопротивления, а не различных значений для каждой температуры.
После деления на указанное отношение разница сопротивлений при эталонной температуре Тo может быть выражена как:

Как можно видеть из уравнения 6, преобразованная разница сопротивлений ΔR' может быть аппроксимирована вычитанием из преобразованного сопротивления R' первичного сопротивления R'virgin для эталонной температуры.
Хотя уравнения 5 и 6 дают некоторое приближение, они достаточно точны для мониторинга состояния каната, так как они все же уменьшают эффект влияния температуры на регистрируемое значение сопротивления R в достаточной степени, чтобы выделить изменения сопротивления, обусловленные изменениями поперечного сечения каната. В экспериментальных испытаниях с использованием одного из вариантов выполнения настоящего изобретения разница в расчетах с использованием только одного датчика 108 температуры и с использованием нескольких датчиков 108 температуры составила около 3%, что составляет ошибку, которую можно учесть соответствующим выбором критериев замены оборудования и которая вполне приемлема с учетом сложности систем с несколькими датчиками.
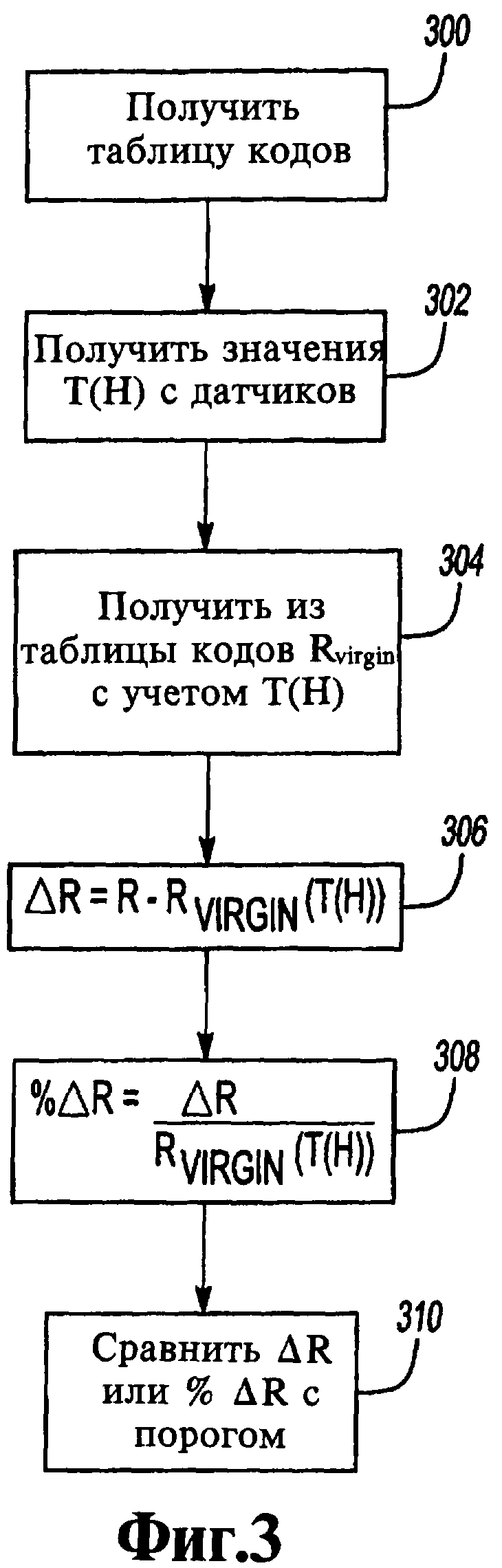
На фиг.3 и 4 представлены альтернативные варианты выполнения изобретения, которые могут быть реализованы в случае использования только одного датчика 108 температуры. В варианте, показанном на фиг.3, в процессоре используют таблицу кодов, содержащую все значения сопротивления каната для первичного каната в функции от температуры. Процессор затем получает данные о температуре Т(Н) с датчиков 108 температуры и значения сопротивления R с датчиков 110 измерений электрических параметров (блок 302). В этом варианте выполнения в процессоре 112 значения температуры Т(Н) рассматриваются, как если бы это была температура во всей шахте лифта.
Процессор 112 затем выбирает значение для Rvirgin на основе значений температуры Т(Н) (блок 304) и затем вычитает Rvirgin из значения сопротивления R, чтобы получить ΔR (блок 306). По желанию разница сопротивлений ΔR может быть поделена на первичное значение сопротивления Rvirgin, чтобы получить относительное изменение сопротивления, обусловленное износом системы подвешивания кабины (блок 308). ΔR или относительное изменение значения сопротивления можно затем сравнить с пороговым значением сопротивления (блок 310).
В альтернативном варианте выполнения изобретения, представленном на фиг.4, начальные значения, занесенные в память устройства 100, включают первичное сопротивление при эталонной температуре R'virgin(To). В этом варианте выполнения процессор 112 получает начальное значение R'virgin(To) (блок 311). После получения значения температуры Т(Н) и значения сопротивления R (блок 312) процессор 112 может преобразовать измеренное значение сопротивления R в эквивалентное измеренное значение сопротивления R' при эталонной температуре Тo прежде, чем проводить какие-либо оценки (блок 314). В этом случае нет необходимости в таблице кодов первичных значений сопротивления R'virgin(То), так как R'virgin(To) будет всегда одним и тем же для данного значения Тo. После преобразования измеренного значения сопротивления R' первичное значение сопротивления для эталонной температуры R'virgin(To) вычитается из преобразованного значения R', чтобы получить преобразованную разницу сопротивлений ΔR' (блок 316). Эта преобразованная разность сопротивлений ΔR' сравнивается затем с пороговым значением для оценки состояния системы подвешивания кабины (блок 318).
Во всех вариантах выполнения изобретения, описанных выше, изменения измеренной температуры на новые значения могут вызвать пересчет преобразованного сопротивления для новой температуры. Кроме того, хотя в приведенных выше примерах внимание сфокусировано на преобразовании первичного сопротивления для учета измеренной температуры в шахте лифта, как первичное сопротивление, так и/или измеренное сопротивление можно преобразовывать, только если первичное и измеренное сопротивление оцениваются на основе одной и той же эталонной температуры.
За счет компенсации влияния изменений температуры на электрические параметры, мониторинг которых проводится, в данном изобретении обеспечивается то, что изменения, отражаемые этими электрическими параметрами, обусловлены износом системы подвешивания кабины. Таким образом, электрические параметры могут быть непосредственно связаны с состоянием системы подвешивания кабины и могут быть использованы для мониторинга и оценки остаточной прочности системы. Это позволяет, например, установить единый порог для индикации того, что система нуждается в замене, вне зависимости от любых изменений температуры в шахте лифта.
Должно быть понятно, что при практическом применении изобретения в описанное здесь выполнение его могут быть введены различные изменения. Приведенная ниже формула изобретения предназначена для того, чтобы определить рамки изобретения и тем самым охватить рамками этой формулы способ, устройство и их эквиваленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Узел мониторинга состояния стальных канатов грузоподъемных механизмов различного назначения | 2022 |
|
RU2794525C1 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА СОСТОЯНИЯ ТЯГОВОГО ЭЛЕМЕНТА ЛИФТА И УЗЕЛ ТЯГОВОГО ЭЛЕМЕНТА ЛИФТА | 2004 |
|
RU2398726C2 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ ЛИФТОВЫХ КАНАТОВ | 2013 |
|
RU2550058C1 |
| КАЛИБРОВКА СИСТЕМЫ ОБНАРУЖЕНИЯ ИЗНОСА | 2012 |
|
RU2589443C2 |
| КОНТРОЛЬ СОСТОЯНИЯ ЛИФТА | 2005 |
|
RU2369554C2 |
| ЛИФТ И КАНАТОВЕДУЩИЙ ШКИВ ЛИФТА | 2001 |
|
RU2302368C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ КАБИН ЛИФТА В ОДНОЙ ШАХТЕ | 2007 |
|
RU2484002C2 |
| ЛИФТ С РАСШИРЕННЫМ КОПИРОВАНИЕМ ШАХТЫ | 2006 |
|
RU2404111C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИСТАНЦИОННОГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЛИФТА | 2003 |
|
RU2317241C2 |
| СПОСОБ ЗАМЕНЫ ТЯГОВОГО КАНАТА КАБИНЫ ЛИФТА В ШАХТЕ | 2008 |
|
RU2373132C1 |

Группа изобретений относится к контрольному и предохранительному оборудованию лифтов. Представлены устройство и способ мониторинга состояния системы подвешивания кабины лифта, а также узел системы подвешивания кабины лифта, выполненный аналогично указанному устройству. Мониторинг основан на измерении электрического параметра, такого как сопротивление, системы подвешивания с исключением зависимости от температуры системы. Производится подсчет сопротивления системы в первичном состоянии для тех же температурных условий, в которых находится система в процессе мониторинга, и результат вычитается из измеренного сопротивления системы подвешивания кабины, мониторинг состояния которой проводится. Для упрощения расчетов и мониторинга значения сопротивлений системы подвешивания кабины в первичном состоянии и системы подвешивания, мониторинг которой проводится, могут быть преобразованы в значения для эталонной температуры. Группа изобретений позволяет повысить качество мониторинга и безопасность эксплуатации лифта. 3 н. и 16 з.п. ф-лы, 4 ил.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ТРАВМАТИЧЕСКОГО ОСТЕОМИЕЛИТА | 2003 |
|
RU2233486C1 |
| JP 2004075221 А, 11.03.2004 | |||
| СПОСОБ ИНСТРУМЕНТАЛЬНОГО ПОИСКА ДЕФЕКТОВ И ПОВРЕЖДЕНИЙ НА КАНАТЕ | 1994 |
|
RU2142902C1 |

