Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе контроля состояния лифта, которые существенно упрощают используемые в нем компоненты и архитектуру цепи безопасности и при этом также улучшают рабочие характеристики лифта.
Уровень техники
Исторически в качестве стандартной практики в промышленности изготовления лифтов строго разделяли сбор информации, направленной на обеспечение безопасности, от информации, предназначенной для управления лифтом. Это обстоятельство существовало частично из-за того, что для контроллера лифта требуется информация, имеющая высокую точность и частоту, представляющая положение и скорость кабины, в то время как наиболее важный фактор в цепи безопасности состоит в том, что информация, поставляемая в нее, гарантированно не содержала бы ошибок. В соответствии с этим, несмотря на то, что технология датчиков, используемая для передачи в контроллер информации, существенно улучшилась за последние годы, датчики, используемые в цепях безопасности лифта, все еще основаны на относительно старом "проверенном и надежном" механическом или электромеханическом принципе с очень ограниченной функциональностью; при этом обычный регулятор превышения скорости устанавливают для управления одним заданным значением превышения скорости, и сбор информации о положении, относящейся в безопасности, ограничен концами шахты лифта и зонами посадочных дверей.
Поскольку контроллер и системы цепи безопасности независимо собирают, в определенной степени, одну и ту же информацию, всегда существует частичная избыточность при сборе информации в установках существующих лифтов.
Было предложено заменить компоненты цепи безопасности, например обычные регуляторы превышения скорости и аварийные предельные выключатели на концах шахт лифтов, на более совершенные электронные или программируемые датчики. Такая система была описана в WO A1-03/011733, в которой одиночная дорожка манчестерского кода, установленная вдоль всей шахты лифта, считывается датчиками, установленными на кабине, что обеспечивает контроллер очень точной информацией о положении кабины. Кроме того, поскольку здесь используются два идентичных датчика, подключенных к двум взаимно контролирующим друг друга процессорам, выполняется критерий требуемой параллельной избыточности для обеспечения безошибочной информации в цепи безопасности. Однако следует понимать, что эта система является относительно дорогостоящей, поскольку она обязательно включает избыточный датчик и поэтому в большей степени пригодна для использования в лифтах, предназначенных для подъема на большую высоту, чем в установках, рассчитанных на подъем на среднюю и малую высоту. Кроме того, поскольку идентичные датчики используют для измерения одного и того же параметра, существует вероятность их одновременного отказа, поскольку датчики подвержены одним и тем же допускам при производстве и рабочим условиям.
Раскрытие изобретения
Настоящее изобретение направлено на существенное упрощение компонентов, используемых в архитектуре цепи безопасности, при одновременном улучшении рабочих характеристик лифта с использованием более совершенных систем сбора информации шахты лифта. Эта цель обеспечивается с помощью способа и системы технического надзора над безопасностью лифта, кабина которого приводится в движение с помощью механизма привода, в соответствии с приложенной формулой изобретения, в которой параметр перемещения кабины отслеживают и постоянно сравнивают с аналогично отслеживаемым параметром перемещения средства привода. Если результат сравнения покажет значительное отклонение между этими двумя параметрами, инициируется аварийная остановка. В противном случае один из параметров перемещения выводят как проверенный сигнал. Проверенный сигнал затем сравнивают с заданными разрешенными значениями. Если он находится за пределами разрешенного диапазона, инициируют аварийную остановку. Параметры перемещения, измеряемые для кабины и для средства привода, могут представлять собой одну из следующих физических величин: положение, скорость или ускорение.
Поскольку проверенный сигнал получают в форме результата сравнения сигналов двух независимых систем датчиков, он удовлетворяет используемым в настоящее время требованиям техники безопасности.
Кроме того, поскольку две независимые системы датчиков отслеживают различные параметры, повышается функциональность; например, способ и система позволяют легко определять отклонения между работой средства привода и перемещением кабины и, если потребуется, инициировать безопасную реакцию.
Параметр перемещения кабины можно отслеживать путем установки датчика на кабине или, если должна быть модернизирована существующая установка, параметр перемещения кабины можно отслеживать путем установки датчика на регуляторе превышения скорости.
В то время как обычный регулятор превышения скорости имеет заданное значение превышения скорости, настоящее изобретение позволяет использовать разрешенный набор значений так, что значение превышения скорости может, например, зависеть от положения кабины внутри шахты лифта.
Предпочтительно, замедление кабины отслеживают непосредственно после каждой аварийной остановки. Если замедление будет ниже определенного значения, включают предохранительный механизм, установленный на кабине, для остановки кабины. В обычной системе предохранительный механизм включают только при заданном значении превышения скорости. Так, например, в случае разрыва тягового каната установки лифта обычная система включает предохранительный механизм для остановки кабины только после того, как она достигнет относительно высокого значения предельного превышения скорости. Понятно, что такое фрикционное торможение кабины по отношению к направляющим рельсам с помощью предохранительного механизма на такой высокой скорости может привести к серьезным повреждениям направляющих рельсов и, что еще более важно, оказать очень неприятное воздействие на пассажиров, находящихся внутри кабины.
Краткое описание чертежей
Настоящее изобретение описано здесь с использованием конкретных примеров, со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 показано схематичное представление систем датчиков, используемых в установке лифта, в соответствии с первым вариантом выполнения настоящего изобретения;
на фиг.2 показана схема передачи сигналов, представляющая обработку сигналов, поступающих от систем датчиков по фиг.1, для получения информации из шахты лифта, относящейся к безопасности;
на фиг.3 схематично представлены системы датчиков, используемых в установке лифта, в соответствии со вторым вариантом выполнения настоящего изобретения;
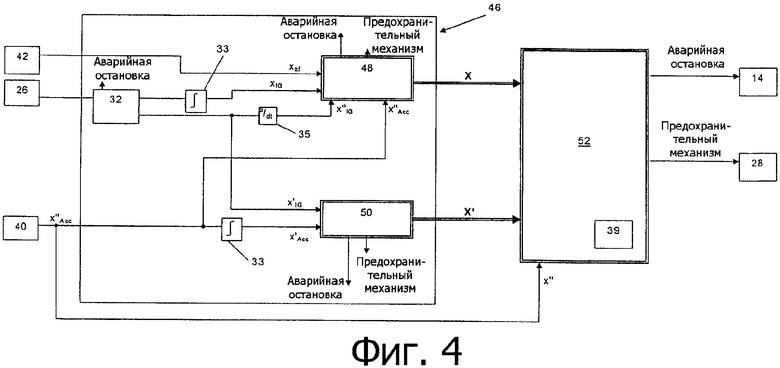
на фиг.4 показана схема передачи сигналов, представляющая обработку сигналов, поступающих от систем датчиков по фиг.3, для получения информации из шахты лифта, относящейся к безопасности;
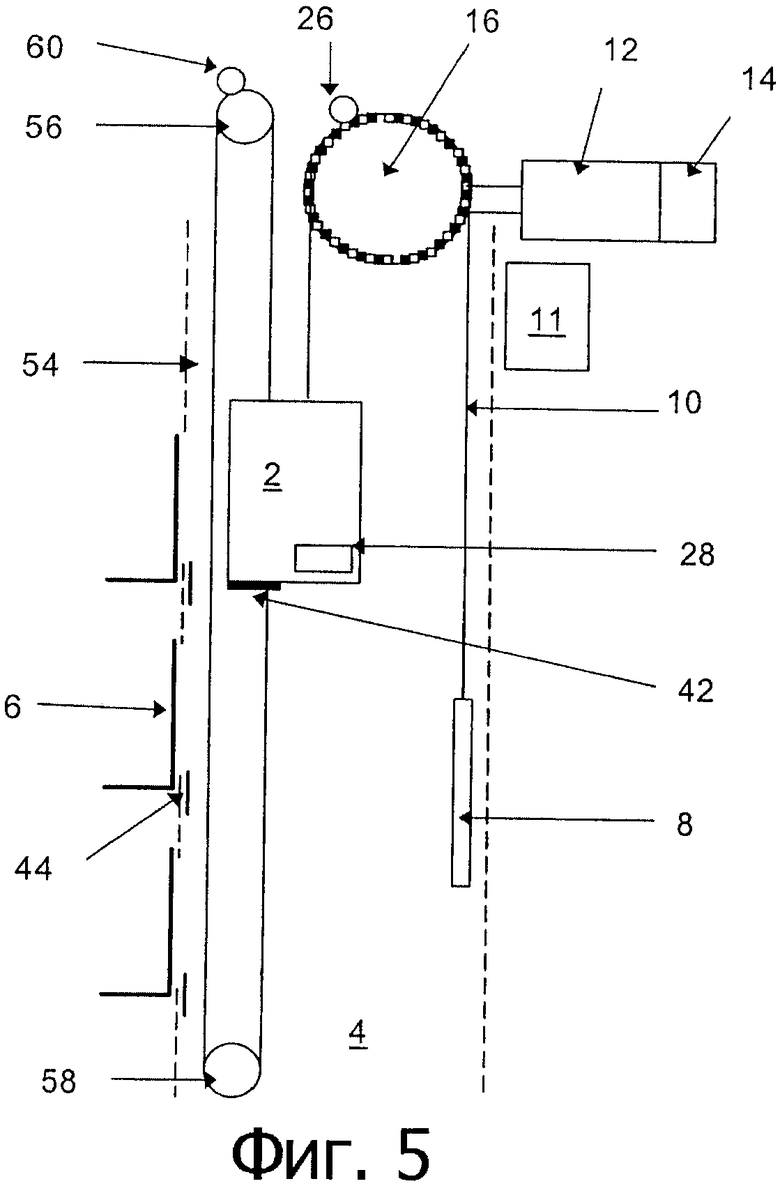
на фиг.5 схематично представлены системы датчиков, используемых в установке лифта, в соответствии с еще одним вариантом выполнения настоящего изобретения;
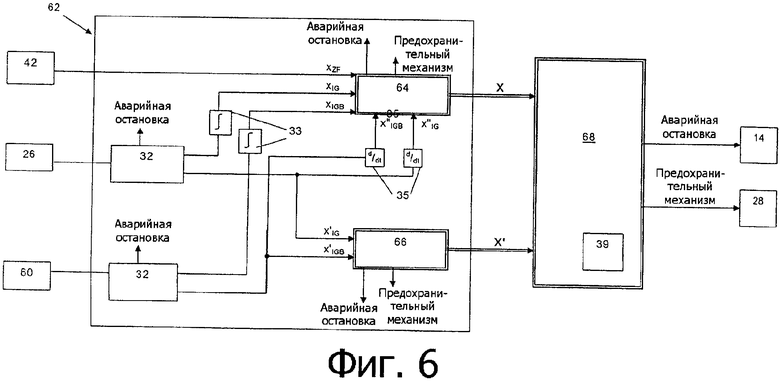
на фиг.6 показана схема передачи сигналов, представляющая обработку сигналов, поступающих от систем датчиков по фиг.5, для получения информации из шахты лифта, относящейся к безопасности; и
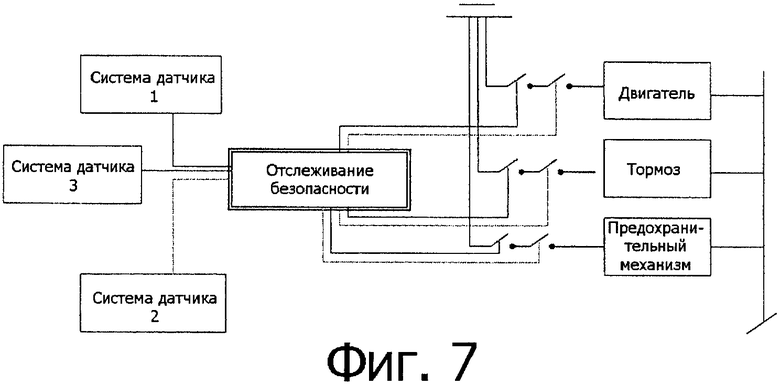
на фиг.7 представлена обобщенная схема архитектуры системы, соответствующей вариантам выполнения, показанным на фиг 1-6.
Осуществление изобретения
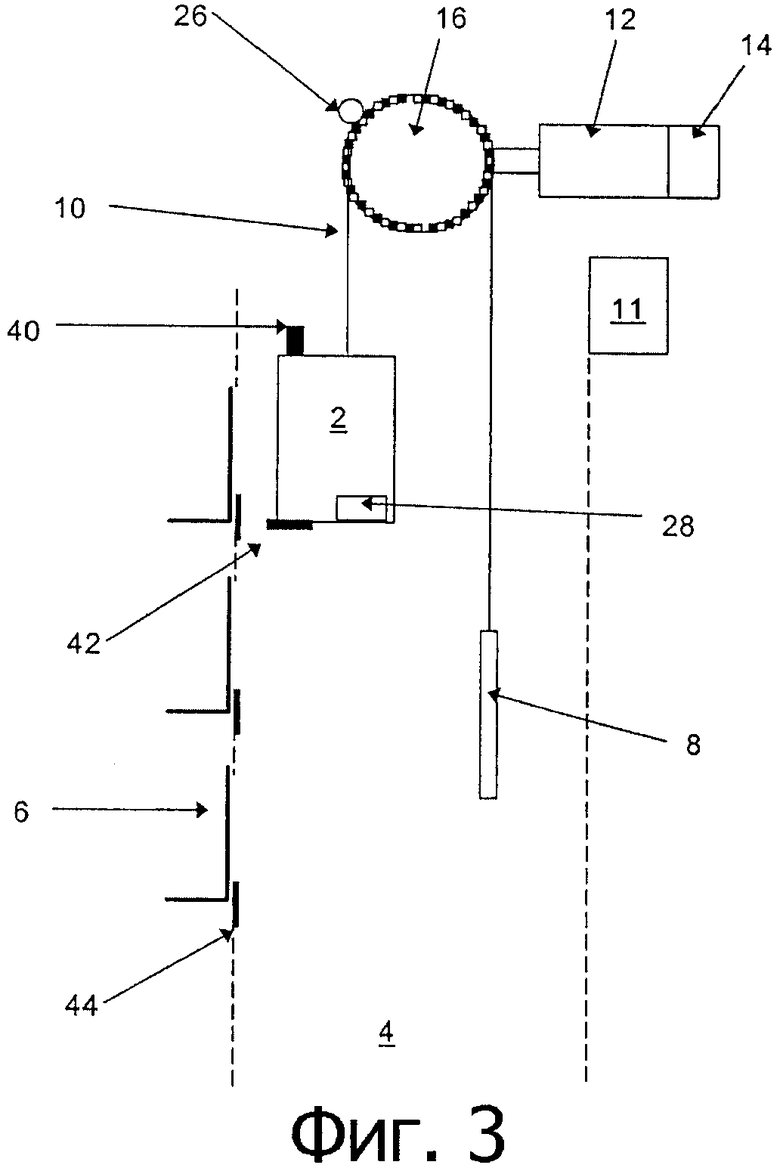
На фиг.1 изображена установка лифта в соответствии с первым вариантом выполнения настоящего изобретения. Установка содержит кабину 2, перемещающуюся вертикально вдоль направляющих рельсов (не показаны), устроенных внутри шахты 4 лифта. Кабина 2 соединена с противовесом 8 с помощью каната или ремня 10, который удерживается и приводится в движение с помощью тягового шкива 16, установленного на выходном валу двигателя 12. Двигатель 12 и, таким образом, движение кабины 4 контролируют с помощью контроллера 11 лифта. Пассажиров доставляют на необходимый этаж через посадочные двери 6, установленные через регулярные интервалы вдоль шахты 4 лифта. Тяговый шкив 16, двигатель 12 и контроллер 11 могут быть установлены в отдельном машинном помещении, расположенном над шахтой 4 лифта, или, в качестве альтернативы, в верхней части шахты 4 лифта.
Как и в любой обычной установке лифта, положение кабины 4 в шахте 4 имеет первостепенное значение для контроллера 11. Поэтому необходимо применять оборудование для получения информации из шахты лифта. В данном примере такое оборудование состоит из кодера 18 абсолютного положения, который установлен на кабине 4 и который находится в постоянном приводном зацеплении с зубчатым ремнем 20, протянутым по всей высоте шахты. Такая система была ранее описана в публикации ЕР-В1-1278693, и дополнительное ее описание здесь не требуется. Магнит 24 установлен на каждом уровне посадки шахты 4 и, в принципе, используется для калибровки. При первоначальном обучающем прогоне магниты 24 активируют магнитный датчик 22, установленный на кабине 4, и после этого соответствующие положения, зарегистрированные устройством, кодирующим абсолютное положение, записанные кодером 18 абсолютного положения, регистрируют как положения 6 посадочной двери для установки. По мере усадки здания, магниты 24 и магнитный датчик 22 соответственно используют для повторной регулировки этих зарегистрированных позиций. Вся информация из шахты лифта, не относящаяся к вопросам безопасности, необходимая контроллеру 11, может затем быть направлена непосредственно из кодера 18 абсолютного положения.
Обычная установка, кроме того, может дополнительно включать регулятор превышения скорости, предназначенный для механического включения предохранительного механизма 28, установленного на кабине 4, если скорость кабины 4 превысит заданное значение скорости. Как можно видеть на фиг.1, этот блок не включен в данный вариант выполнения. Вместо этого генератор 26 импульсов приращения установлен на тяговом валу 26 для постоянного детектирования скорости тягового вала. В качестве альтернативы, генератор 28 импульса приращения может быть установлен на валу двигателя 12. На практике многие двигатели 12, используемые для лифта, уже содержат генератор 26 импульса приращения для обеспечения обратной связи, представляющей информацию о скорости и положении ротора, в преобразователь частоты, который обеспечивает питание двигателя 12. Генератор 28 импульса приращения обеспечивает точную информацию о вращении тягового шкива 16. Импульс генерируют каждый раз, когда тяговый шкив 16 перемещается на определенный угол, и соответственно частота импульсов обеспечивает точную индикацию скорости вращения тягового шкива 12.
Принцип работы, используемый в данном варианте выполнения, состоит в использовании генератора 26 приращения импульсов, кодера 18 абсолютного положения и магнитного детектора 22 (три независимых, одноканальных системы датчиков), для получения всей требуемой информации из шахты лифта, а не только информации из шахты лифта, не относящейся к безопасности.
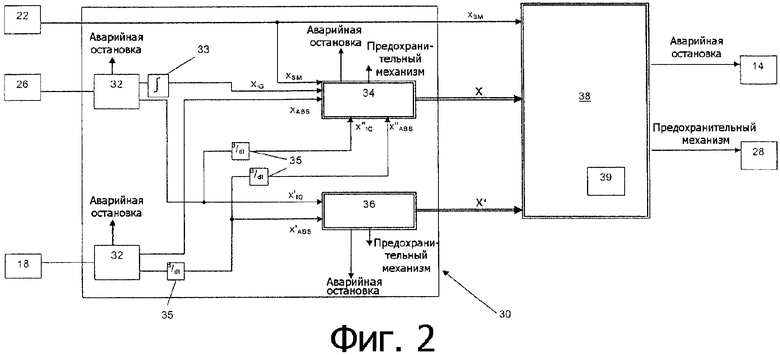
Как, в частности, показано на фиг.2, сигналы, получаемые из трех независимых, одноканальных систем 18, 22 и 26 датчиков, первоначально подают в блок 30 проверки данных. Здесь сигналы из генератора 26 импульсов приращения и кодера 18 абсолютного положения передают для постоянной проверки в модулях 32 для того, чтобы убедиться, что они не содержат ошибку. Если будет определено, что любой из этих сигналов содержит ошибку, соответствующий модуль 32 инициирует аварийную остановку, отключая двигатель 12 и включая тормоз 14, соединенный с двигателем 12. Модуль 32 также может передать сигнал ошибки для обозначения того, что проверяемый датчик неисправен.
Компаратор 34 положения принимает на входе сигнал XSM положения из магнитного детектора 22 и сигнал XABS проверяемого положения из кодера 18 абсолютного положения. Кроме того, проверяемый сигнал Х'IG скорости, получаемый из генератора 26 импульса приращения, поступает через интегратор 33, и полученный в результате сигнал ХIG также подают в компаратор положения 34.
В компараторе положения 34 сигнал ХIG положения, полученный из генератора 26 импульса приращения, и сигнал ХABS положения из кодера 18 абсолютного положения калибруют с использованием сигнала положения ХSM из магнитного детектора 22. Основная разница между генератором 26 импульса приращения и кодером 18 абсолютного положения обычно возникает из-за того, что хотя генератор 26 импульса приращения генерирует импульс при каждом приращении положения, кодер 18 абсолютного положения 18 формирует конкретную, уникальную структуру битов для каждого приращения угла. Такое "абсолютное" значение не требует процедуры калибровки как при использовании генератора 26 импульса приращения. Следовательно, хотя магниты 26 вала и магнитный детектор 22 используют для регулировки зарегистрированных положений посадочной двери 6, которые записывают в кодере 18 абсолютного положения после усадки здания, следует понимать, что кодер 18 абсолютного положения будет знать все положения дверей с высокой степенью точности, и поэтому не требуется дополнительная его калибровка с использованием магнитного детектора 22. Генератор 26 импульса приращения, с другой стороны, требует постоянной калибровки с использованием магнитного детектора 22, поскольку магнитный детектор 22 обозначает позицию кабины лифта, тогда как сигнал от генератора 26 импульса приращения используют для обозначения положения тягового шкива, и какое-либо проскальзывание каната или ремня 10 на тяговом шкиву 16 автоматически выводит генератор 26 импульсов приращения из калиброванного состояния с действительным положением кабины лифта. Такую калибровку выполняют в компараторе 34 положения каждый раз, когда магнитный детектор 22 кабины 4 определяет положение магнита 24 в шахте.
Помимо описанных выше процессов калибровки, основное назначение компаратора 34 положения состоит в постоянном сравнении сигнала ХIG положения, получаемого из генератора 26 импульсов приращения, с соответствующим сигналом
ХABS положения из кодера 18 абсолютного положения. Если два сигнала отличаются, например, на один процент или больше от полной высоты HQ шахты лифта, инициируют аварийную остановку путем отключения двигателя 12 и включения тормоза 14. В некоторых редких случаях, например при разрыве каната 10, такая аварийная остановка может быть недостаточной для остановки кабины 4. В таких ситуациях компаратор 34 положения отслеживает сигналы Х''IG ускорения и X''ABS, полученные путем передачи сигналов из генератора 26 импульсов приращения и кодера 18 абсолютного положения, через дифференциаторы 35, для обеспечения замедления кабины 2, по меньшей мере, с ускорением 0,7 м/с2. Если это не так, компаратор 34 положения электрически включает предохранительный механизм 28 (показанный на фиг.1), установленный на кабине 2 так, что он фрикционно зацепляется с направляющими рельсами и, таким образом, останавливает кабину 4. Электрическое включение предохранительного механизма лифта хорошо известно в данной области техники и описано, например, в ЕР-В1-0508403 и ЕР-В1-1088782.
В противном случае, условие, описанное в представленном ниже уравнении, удовлетворяется, и сигнал ХABS из кодера 18 абсолютного положения, проверенный при сравнении с сигналом ХIG независимого датчика, можно использовать как сигнал Х положения, соответствующего безопасности.
Хотя в следующем описании подробно описано, в частности, использование сигнала Х положения безопасности для контроля безопасности лифта, следует понимать, что сигнал Х может применяться и используется дополнительно для передачи в контроллер 11 запрашиваемой информации из шахты лифта.
Блок 30 проверки данных также включает компаратор 36 скорости, в котором проверяемый сигнал Х'IG скорости, полученный из генератора 26 импульса приращения, используют в качестве входного сигнала. Проверяемый сигнал из кодера 18 абсолютного положения подают через дифференциатор 35 для получения другого входного сигнала X'ABS, представляющего скорость. Два значения скорости
Х'IG и X'ABS постоянно сравнивают друг с другом в компараторе 36 скорости, и в случае, если они отклоняются более чем на пять процентов, инициируют аварийную остановку путем отключения двигателя 12 и включения тормоза 14. Приблизительно через две секунды после инициирования аварийной остановки компаратор 36 скорости включает предохранительный механизм 28.
В противном случае, условия, представленные в обоих приведенных ниже уравнениях, удовлетворяются и сигнал X'ABS, полученный из кодера 18 абсолютного положения, сверенный с сигналом Х'IG независимого датчика, можно использовать в качестве сигнала X' скорости, относящегося к безопасности.
 и
и 
Как и в случае сигнала Х положения, относящегося к безопасности, сигнал X' скорости, относящийся к безопасности, можно подавать в контроллер 11 для получения приемлемой информации из шахты лифта, а также использовать для контроля безопасности лифта.
Сигнал XSM из магнитного детектора 22 подают в блок 38 контроля безопасности вместе с сигналом Х положения, относящегося к безопасности, из компаратора 34 положения, и сигнал X' скорости, относящийся к безопасности, из компаратора 34 скорости. Эти сигналы Х и X', относящиеся к безопасности, постоянно сравнивают с номинальными значениями, записанными в регистрах 39 положения и превышения скорости. Если, например, сигнал X' скорости, относящийся к безопасности, превышает номинальное значение превышения скорости, блок 38 контроля безопасности может инициировать соответствующие реакции. Кроме того, в блок 38 контроля безопасности подают обычную информацию от контактов дверей, отслеживающих состояние посадочных дверей 6 и из контроллера двери кабины или контактов двери кабины. Если во время работы лифта возникает небезопасное состояние, блок 38 контроля безопасности инициирует остановку путем отключения двигателя 12 и включения тормоза 14 и, в случае необходимости, включая предохранительный механизм 28 для остановки кабины 4.
Во время настройки выполняют обучающий прогон кабины 4, в течение которого техник перемещает кабину 4 с очень малой скоростью (например, 0,3 м/с). По мере того, как кабина 4 перемещается мимо посадочных дверей 6, с помощью магнитного датчика 22, установленного на кабине, детектируют соответствующие магниты 24 шахты, и блок 38 контроля безопасности определяет каждое из этих положений, регистрируя соответствующий проверенный сигнал Х положения, полученный из кодера 18 абсолютного 18, и записывая его в соответствующий регистр 38. Кроме того, зону ±20 см от каждого магнита 24 регистрируют как зону открывания двери, в которой дверь 6 может безопасно начинать открывание при нормальных рабочих условиях установки лифта. Самый верхний и самый нижний магниты 24 отмечают конечные точки пути движения кабины, и по отношению к ним можно рассчитать общее расстояние перемещения или высоту HQ шахты лифта. Кривые максимально допустимой скорости (зависимость максимальной номинальной скорости от положения кабины 2) можно затем определить и записать в соответствующий регистр 38.
Как указано выше, постоянное сравнение сигналов, полученных из этих трех систем датчиков в блоке 30 проверки данных, а также постоянная проверка сигналов из генератора 26 импульсов приращения и кодера 18 абсолютного положения обеспечивают быструю идентификацию отказа любой из систем датчиков и инициирование аварийной остановки. Кроме того, если блок 30 проверки данных детектирует существенную величину проскальзывания каната с помощью компараторов 34 и 36, он немедленно включает аварийную остановку. Если при аварийной остановке не обеспечивается достаточное торможение кабины 2, компаратор положения высвобождает передачу 28 безопасности.
Блок 38 контроля безопасности детектирует отказы при работе контроллера 11. Если контроллер разрешает перемещаться кабине 2 со слишком большой скоростью, то сравнение в блоке 38 контроля безопасности сигнала X', относящегося к скорости, из блока 30 проверки данных с регистром 39 превышения скорости идентифицирует отказ, и блок 38 контроля безопасности может включить аварийную остановку.
На фиг.3 и 4 показан второй вариант выполнения настоящего изобретения, в котором магниты 24 шахты и магнитный детектор 22 из предыдущего варианта выполнения были заменены обычными зональными флагами 44, установленными симметрично на высоте 120 мм выше и ниже каждого уровня этажа высадки, вместе с оптическим датчиком 42, установленным на кабине 2, для детектирования флагов 44. Кроме того, кодер 18 абсолютного положения заменен акселерометром, установленным на кабине 4.
В блоке 46 проверки данных в соответствии с этим вариантом выполнения сигнал XIG, полученный из генератора 26 импульса приращения, сравнивают и калибруют по отношению к сигналу XZF положения, поступающего из оптического датчика 42. Расстояние ΔХZF между последовательными флагами 44 записывают и сравнивают с соответствующим расстоянием ΔХIG, полученным из генератора 26 импульса приращения. Если в результате такого сравнения будет определено увеличение отклонения двух расстояний на два процента или больше, тогда включают аварийную остановку путем отключения двигателя 12 и включения тормоза 14. Кроме того, замедление системы отслеживают после включения аварийной остановки для обеспечения того, что, по меньшей мере, один из сигналов, полученных как из генератора 26 импульса приращения, так и из акселерометра 18, покажет замедление, по меньшей мере, с ускорением 0,7 м/с2, что указывает на то, что аварийная остановка достаточна для остановки кабины 2. В противном случае включают предохранительный механизм 28 (показанный на фиг.1), установленный на кабине 2, с тем, чтобы он фрикционно зацепился с направляющими рельсами и, таким образом, остановил кабину 4.
В противном случае, условие, представленное в приведенном ниже уравнении, удовлетворяется, и сигнал ХIG, полученный из генератора 26 импульсов приращения, проверенный путем сравнения с сигналом XZF независимого датчика, можно использовать в качестве сигнала Х положения, относящегося к безопасности.
Блок 46 проверки данных также включает компаратор 50 скорости, в котором проверяемый сигнал Х'IG скорости, полученный из генератора 26 импульсов приращения, используют в качестве входного сигнала. Сигнал Х"АСС из акселерометра 40 подают в интегратор 33 для получения дополнительного входного сигнала Х'ACC, представляющего вертикальную скорость кабины 2. Два значения Х'IG и X'ACC скорости постоянно сравнивают друг с другом в компараторе 50 скорости и, если они отклоняются более, чем на пять процентов, выключают аварийную остановку путем отключения двигателя 12 и включения тормоза 14. Как и в предыдущем варианте выполнения, приблизительно через две секунды после включения аварийной остановки компаратор 36 скорости включает предохранительный механизм 28.
В противном случае, условия, представленные в обоих приведенных выше уравнениях, удовлетворяются, и сигнал Х'IG, полученный из генератора 26 импульсов приращения, сверенный с сигналом Х'ACC независимого датчика, можно использовать как сигнал X' скорости, относящийся к безопасности.
 и
и 
Сигнал Х''АСС ускорения из акселерометра 40 поступает в блок 52 контроля безопасности вместе с сигналом Х положения, относящимся к безопасности, из компаратора 48 положения, и сигналом X' скорости, относящейся к безопасности, из компаратора 50 скорости. Если во время работы лифта возникает небезопасное условие, блок 38 контроля безопасности может включить аварийную остановку путем отключения двигателя 12 и включения тормоза 14 и, в случае необходимости, активирует предохранительный механизм 28 для остановки кабины 4.
На фиг.5 и 6 показана существующая установка лифта, которая была модифицирована в соответствии с еще одним вариантом выполнения настоящего изобретения. Существующая установка включает обычный регулятор превышения скорости, который представляет собой установленное и надежное средство определения скорости кабины 2 лифта. Регулятор содержит канат или трос 54 регулятора, соединенный с кабиной 2 лифта и отклоняемый с помощью верхнего шкива 56 и нижнего шкива 58. В обычной системе верхний шкив 56 содержит центробежные выключатели, установленные так, что они включаются при заданном значении превышения скорости кабины 2. В данном варианте выполнения эти выключатели заменены генератором 60 импульса приращения, который установлен на верхнем шкиву 56.
Обработка информации, полученной из генератора 60 импульсов приращения генератора 26 импульсов приращения тягового шкива и оптического датчика 42, организована так же, как и в предыдущих вариантах выполнения, в которых сигналы проверяют и сравнивают в блоке 62 проверки данных для подачи сигнала Х положения, относящегося к безопасности, и сигнала X' скорости, относящегося к безопасности, в блок 68 контроля безопасности.
На фиг.7 представлен обобщенный вид архитектуры системы описанных выше вариантов выполнения. Три независимых одноканальных системы датчиков соединены с блоком отслеживания безопасности, который в описанных выше вариантах выполнения содержит блок проверки данных и блок контроля безопасности. Блок отслеживания безопасности получает информацию о положении и скорости, относящуюся к безопасности, которую он использует для эксплуатации лифта в безопасных условиях, путем отключения двигателя, включения тормоза и/или включения предохранительного механизма.
Тормоз не обязательно должен быть установлен на двигателе, но может составлять элемент предохранительного механизма. Если предохранительный механизм состоит из четырех модулей, тогда нормальное торможение может быть, например, инициировано путем включения двух из этих четырех модулей.
Во всех описанных вариантах выполнения изобретения следует понимать, что сигналы, полученные из блоков проверки данных и блоков контроля безопасности, можно использовать для получения необходимой информации из шахты лифта для контроллера 11 лифта, а также для выполнения задач, относящихся к безопасности эксплуатации лифта.
Кроме того, следует понимать, что изобретение в равной степени можно применять для установок с гидравлическим лифтом так же, как и для установок с тяговым лифтом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИФТ С РАСШИРЕННЫМ КОПИРОВАНИЕМ ШАХТЫ | 2006 |
|
RU2404111C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛИФТА | 2008 |
|
RU2499760C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ АВАРИЙНОГО ТОРМОЖЕНИЯ ИЛИ УЛАВЛИВАНИЯ ТИПА ISG | 2006 |
|
RU2403202C2 |
| ЛИФТОВАЯ УСТАНОВКА, СОДЕРЖАЩАЯ КАБИНУ И ПРОТИВОВЕС | 2011 |
|
RU2583829C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЛИФТОВОЙ УСТАНОВКИ | 2016 |
|
RU2717604C2 |
| СПОСОБ АКТИВАЦИИ ЛОВИТЕЛЯ | 2011 |
|
RU2576366C2 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| СИГНАЛЬНАЯ ЛЕНТА, СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ДВИЖЕНИЯ ДВИЖУЩЕГОСЯ ТЕЛА, УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ СКОРОСТИ И ЕГО ПРИМЕНЕНИЕ | 2005 |
|
RU2370429C2 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
Изобретение относится к контролю состояния лифта. В системе контроля безопасности лифта, имеющего кабину (2), приводимую в движение с помощью средства (12) привода, установленную в шахте (4) лифта, в которой параметр
(XABS, X''ACC, X'IGB) перемещения кабины (2) определяют и постоянно сравнивают с аналогично определяемым параметром (X'IG) перемещения средства привода. Если результат сравнения показывает большие отклонения между этими двумя параметрами, инициируют аварийную остановку. В противном случае один из параметров (XABC, X''ACC, X'IGB; X'IG) перемещения выводят как проверенный сигнал (X; X'). Проверенный сигнал затем сравнивают с заданными разрешенными значениями. Если он находится за пределами разрешенного диапазона, инициируют аварийную остановку. Изобретение направлено на существенное упрощение компонентов, используемых в архитектуре цепи безопасности, при одновременном улучшении рабочих характеристик лифта с использованием более совершенных систем сбора информации шахты лифта. 2 н. и 11 з.п. ф-лы, 7 ил.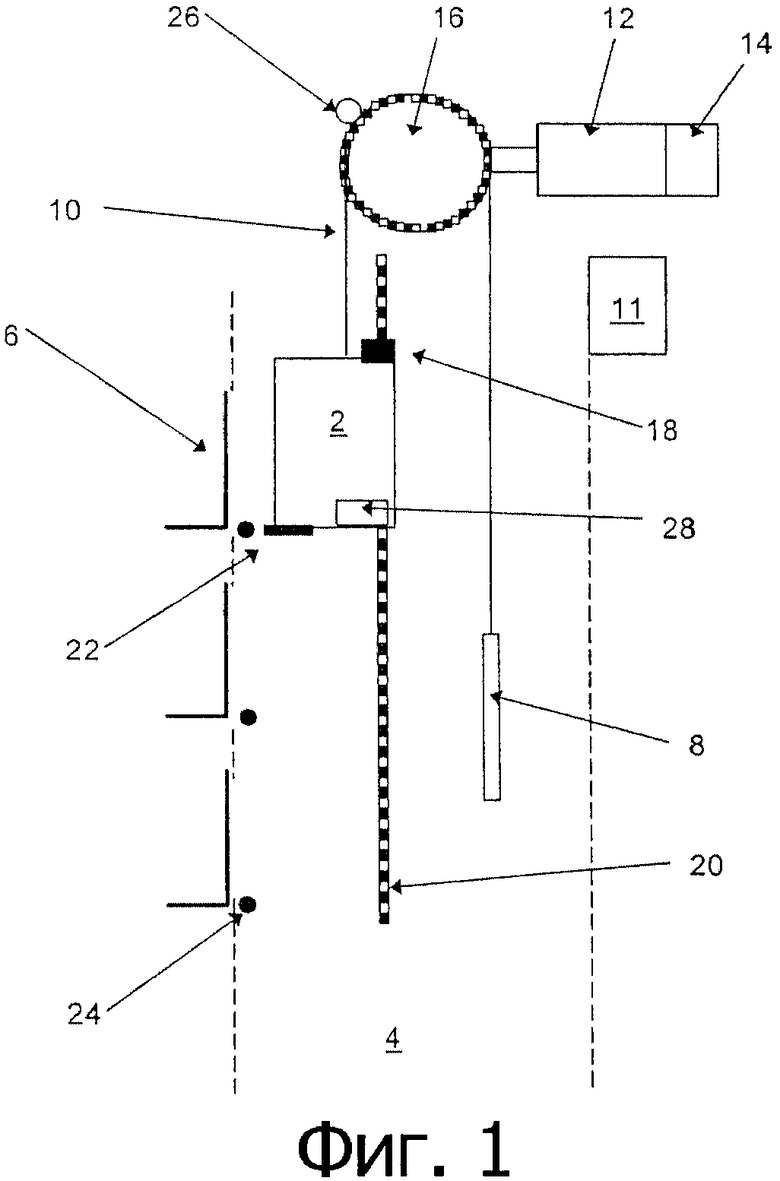
1. Способ контроля безопасности лифта, имеющего кабину (2), приводимую в движение с помощью средства (12) привода, включающий следующие этапы:
a) отслеживание параметров (XABS, X′′ACC, X'IGB) перемещения кабины (2); характеризующийся
b) отслеживанием параметров (X'IG) перемещения средства (12) привода;
c) сравнением параметров (XABS, X''ACC, X'IGB; Х'IG) перемещения так, что, если произойдет отклонение между двумя параметрами более чем на заданную величину, включают аварийную остановку, в противном случае выводят один из параметров перемещения, как проверенный сигнал (X; X');
d) сравнением проверенного сигнала (X; X'') с заданными разрешенными значениями;
e) включением аварийной остановки, если проверенный сигнал (X; X') находится за пределами разрешенных значений.
2. Способ по п.1, в котором между этапами b) и с) выполняют дополнительный этап преобразования одного или обоих определяемых параметров движения (XABS, X''ACC, X'IGB; X'IG) так, что они оба относятся к первой физической величине.
3. Способ по п.2, в котором этапы a)-e) одновременно выполняют для второй физической величины.
4. Способ по любому из пп.1-3, дополнительно включающий этап отслеживания замедления кабины (2) после включения аварийной остановки и включения предохранительного механизма (28), если замедление меньше, чем определенная величина.
5. Способ по любому из пп.1-3, в котором измеряемый параметр перемещения кабины (XABC, X''ACC, Х'IGB) или средства (Х'IG) привода представляет собой один из параметров: координата, скорость или ускорение.
6. Способ по п.4, в котором измеряемый параметр перемещения кабины (XABS, X''ACC, X'IGB) или средства (X'IG) привода представляет собой один из параметров: координата, скорость или ускорение.
7. Система контроля безопасности для установки лифта, включающего кабину (2), приводимую в движение с помощью средства (12) привода, содержащая:
первый датчик (18, 40, 60), обозначающий параметр (XABS, X''ACC, X'IGB) перемещения кабины (2);
по меньшей мере, один регистр (39), содержащий значения параметра разрешенного перемещения, отличающаяся тем, что дополнительно содержит:
второй датчик (26), обозначающий параметр (X'IG) перемещения средства (12) привода;
первое средство (34, 36, 48, 50, 64, 66) компаратора, сравнивающее параметры (XABS, X''ACC, X'IGB; Х'IG) для вырабатывания аварийной остановки, если два параметра отклоняются более чем на заданное значение, в противном случае рассчитывают один из определенных параметров движения, как проверенный сигнал (X; X'); и
второе средство (38, 52, 68) компаратора, выполняющее сравнение проверенного сигнала (X; X') с разрешенными параметрами перемещения, зарегистрированными в регистре (39), и инициирующее аварийную остановку, если проверенный сигнал (X; X') находится за пределами заданных значений.
8. Система по п.7, дополнительно содержащая средство (33, 35) преобразователя, преобразующего один или оба отслеживаемых параметра (XABS, X''ACC, X'IGB; Х'IG) перемещения так, что они оба относятся к первой физической величине.
9. Система по п.7 или 8, дополнительно содержащая монитор замедления, предназначенный для включения предохранительного механизма (28), установленного на кабине (2), если замедление после включения аварийной остановки меньше, чем заданное значение.
10. Система по любому из пп.7 или 8, в которой первый датчик (18, 40) установлен на кабине (2).
11. Система по п.9, в которой первый датчик (18, 40) установлен на кабине (2).
12. Система по любому из пп.7 или 8, в которой первый датчик (60) установлен на регуляторе (54, 56, 58) превышения скорости, соединенном с кабиной (2).
13. Система по п.9, в которой первый датчик (60) установлен на регуляторе (54, 56, 58) превышения скорости, соединенном с кабиной (2).
| Шихта для огнеупорного покрытия | 1972 |
|
SU477976A1 |
| DE 10150284 А, 30.04.2003 | |||
| US 6170614 B1, 09.01.2001 | |||
| СПОСОБ УПРАВЛЕНИЯ И КОНТРОЛЯ РАБОТЫ ЛИФТОВОЙ УСТАНОВКИ | 1996 |
|
RU2161117C2 |

