Изобретение относится к контрольным устройствам, обеспечивающим безопасность эксплуатации подъемников, в частности лифтов различного назначения, срабатывающим при ненормальных условиях эксплуатации подъемников с помощью проверки состояния стальных канатов, использующихся в качестве тяговых и уравновешивающих элементов канатно-блочной системы лифтов.
Необходимость контроля технического состояния канатов обусловлена требованиями безопасности эксплуатации лифтового оборудования и подтверждена результатами многочисленных испытаний, приведенных, например, в работе [1], которые осуществлялись как в лабораторных, так и в производственных условиях. По представленным результатам прикладных исследований, из более 8000 подвергавшихся замене канатов около 10% имели потерю прочности более 15%, примерно 2% канатов потеряли более 30% номинальной прочности.
Следовательно, возникает актуальная научно-техническая задача непрерывного контроля состояния канатов грузоподьемных механизмов, в частности лифтов, которая может быть решена с помощью различных технических устройств. Конструкции некоторых из них, являющихся близкими по технической сущности к заявленному изобретению, рассмотрены ниже.
Из уровня техники известна система дефектоскопии каната кольцевой подвесной канатной дороги (RU2739815C1, СПК D07B 9/00, F16G 9/00, опубл. 28.12.2020). Система включает в себя G-сенсоры, интегрированные в канат кольцевой подвесной канатной дороги, и неподвижные приемники, установленные на промежуточных опорах. При этом упомянутые приемники выполнены с возможностью считывания состояния G-сенсоров и передачи полученных данных удаленной автоматизированной системе, осуществляющей дефектоскопию каната [2].
Недостатком известной системы дефектоскопии является то, что для ее функционирования необходим первоначально изготовленный специализированный несуще-тяговый канат. Изготовление такого каната увеличивает как трудоемкость создания подвесной дороги, так и дальнейшую ее эксплуатацию в целом.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признано устройство мониторинга системы подвешивания кабины лифта (RU2330806C9, МПК B66B 5/00, опубл. 10.08.2008). Устройство содержит датчики температуры, расположенные в шахте лифта, датчики измерения электрического параметра, по меньшей мере, одной части системы подвешивания кабины, и микропроцессорную систему, выполненную с возможностью сравнения результатов измерений, полученных от упомянутых датчиков с их эталонными значениями, и определения на основе результатов сравнения текущего состояния системы подвешивания кабины [3].
Недостатком известного технического решения является его низкая технологичность, связанная со сложностью устройства, требующего применения большого количества датчиков, распределенных по всей лифтовой шахте. Кроме того, наличие большого количества датчиков значительно осложняет задачу калибровки микропроцессорной системы и повышает вероятность ложного срабатывания системы мониторинга состояния узла подвешивания кабины лифта.
Технической задачей, на решение которой направлено заявленное изобретение, является создание узла контроля состояния стальных канатов грузоподъемных механизмов различного назначения по всей их длине, обеспечивающего непрерывный бесконтактный мониторинг дефектов канатов и передачу полученных данных удаленной автоматизированной системе управления безопасностью лифтового оборудования.
Указанная задача решена тем, что узел мониторинга состояния стальных канатов грузоподъемных механизмов различного назначения состоит из корпуса, смонтированного на наклонно-поворотном кронштейне, закрепленном на стене лифтовой шахты. На внешней поверхности корпуса закреплена видеокамера, снабженная USB-выходом и подключенная с помощью USB-кабеля к видеовходу блока управления. При этом блок управления устройством размещен внутри корпуса и выполнен на основе микроконтроллера, содержащего микропроцессорное ядро, соединенное с помощью системной шины с периферийными устройствами микроконтроллера: USB-контроллером, Ethernet-контроллером, модулем LCD-интерфейса, интерфейсом ввода-вывода общего назначения, сгруппированного в восьмиразрядный GPIO-порт ввода-вывода, и модулем подключения SD-карты. К USB-контроллеру подключен видеовход блока управления, Ethernet-контроллер подключен к Wi-Fi-модулю, к модулю LCD-интерфейса электрически подключен TFT-дисплей, к восьмиразрядному GPIO-порту ввода-вывода подключена кнопочная клавиатура, а в слот модуля подключения SD-карты вставлена и электрически соединена с модулем SD-карта.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков устройства, является возможность бесконтактного мониторинга дефектов стальных канатов грузоподьемных механизмов, в частности лифтов, за счет непрерывной макросъемки каната с помощью видеокамеры, оперативного анализа его состояния с помощью микроконтроллера блока управления и возможности передачи данных о возможных повреждениях каната удаленной системе мониторинга с помощью Wi-Fi-модуля.
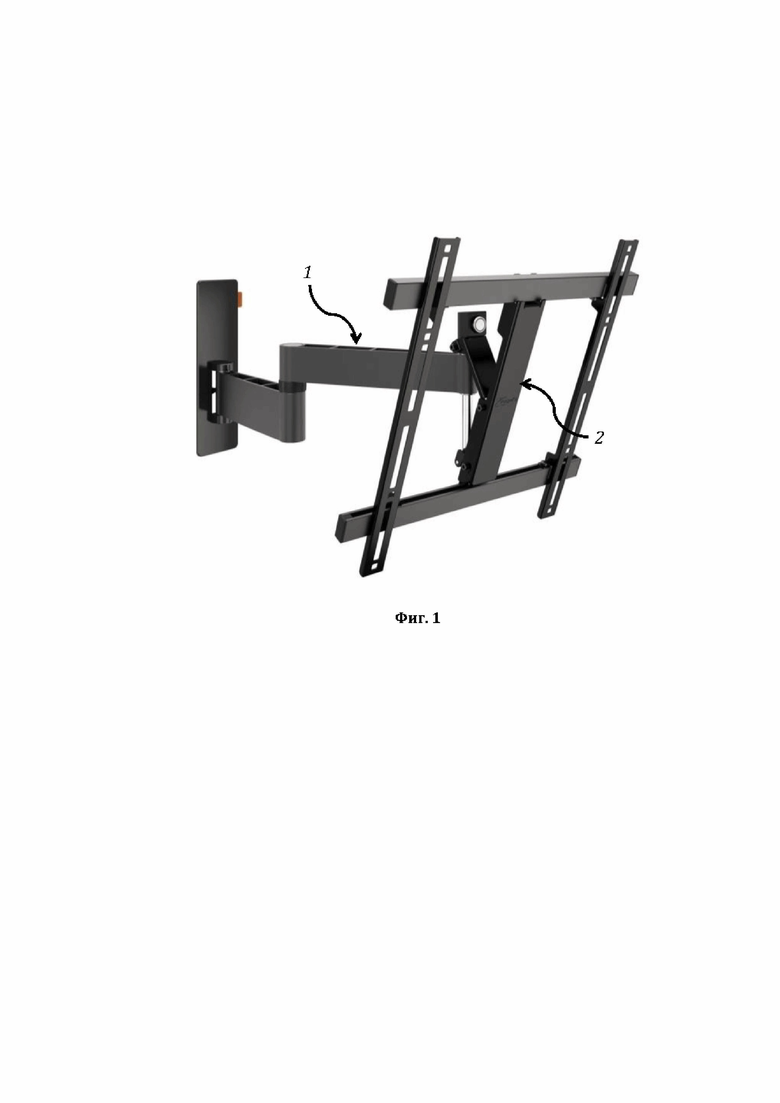
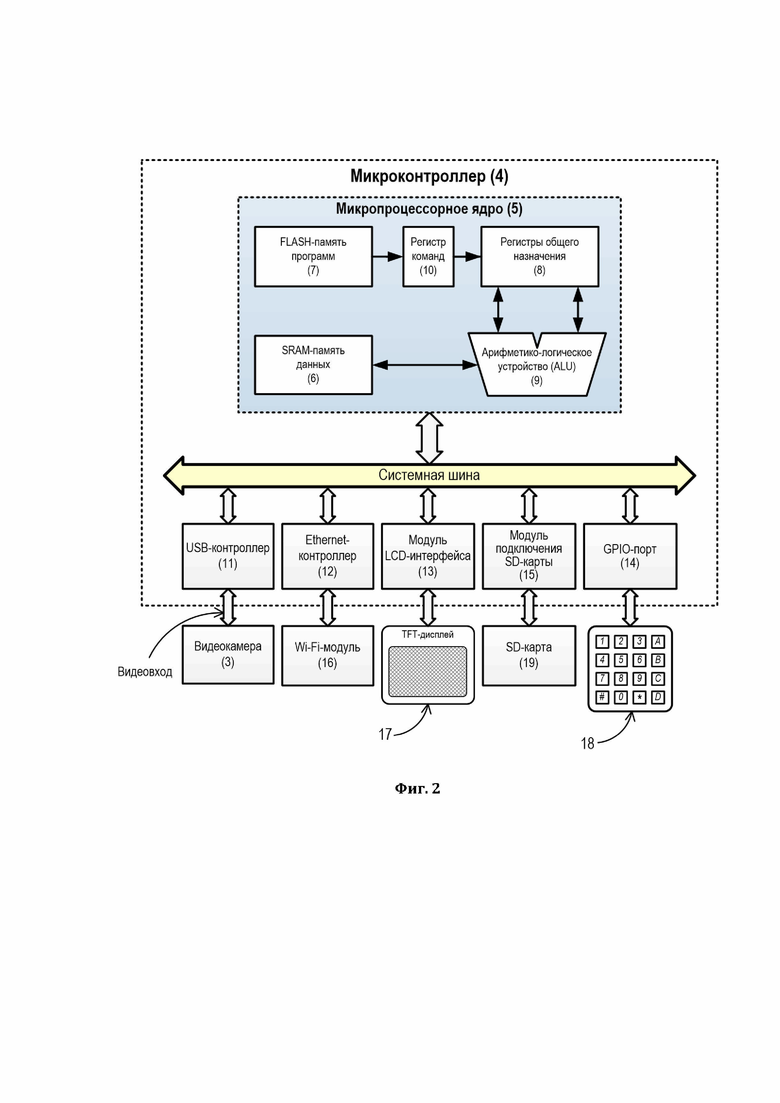
Конструкция устройства поясняется чертежами, где на фиг. 1 показан внешний вид корпуса устройства, смонтированного на наклонно-поворотном кронштейне; на фиг. 2 представлена структурная схема блока управления; на фиг. 3 показаны возможные повреждения стальных канатов грузоподъемных механизмов (повреждение типа «выдавливание прядей внешней свивки»), определяемых с помощью устройства.
Узел мониторинга состояния стальных канатов грузоподьемных механизмов различного назначения устроен следующим образом.
Его основой является корпус 1, смонтированный на наклонно-поворотном кронштейне 2, закрепленном на стене лифтовой шахты. На внешней поверхности корпуса закреплена видеокамера 3, выполненная с возможностью получения видеопотока сверхвысокой четкости, снабженная USB-выходом и подключенная с помощью USB-кабеля к видеовходу блока управления. При этом блок управления устройством размещен внутри корпуса 1 и выполнен на основе микроконтроллера 4, содержащего высокопроизводительное микропроцессорное ядро 5, построенное на основе гарвардской архитектуры, включающее в себя SRAM-память данных 6, FLASH-память программ 7 и регистры общего назначения 8, подключенные к арифметико-логическому устройству ALU 9, при этом к регистрам общего назначения 8 напрямую подключена SRAM-память данных, а через регистр команд 10 подключена FLASH-память программ 7.
Дополнительно микропроцессорное ядро может содержать сопроцессор для обработки чисел с плавающей точкой и блок регистров (на фигурах условно не показаны), позволяющих хранить числа с плавающей точкой одинарной и двойной точности, подключенных к сопроцессору, причем каждый из регистров сопроцессора может являться как источником, так и приемником данных.
Микропроцессорное ядро 5 соединено с помощью системной шины с периферийными устройствами микроконтроллера: USB-контроллером 11, Ethernet-контроллером 12, модулем LCD-интерфейса 13, интерфейсом ввода-вывода общего назначения, сгруппированного в восьмиразрядный GPIO-порт ввода-вывода 14, и модулем подключения 15 SD-карты. К USB-контроллеру 11 подключен видеовход блока управления, Ethernet-контроллер 12 подключен к Wi-Fi-модулю 16, к модулю LCD-интерфейса 13 электрически подключен TFT-дисплей 17, к восьмиразрядному GPIO-порту ввода-вывода 14 подключена кнопочная клавиатура 18, а в слот модуля подключения 15 SD-карты вставлена и электрически соединена с модулем SD-карта 19.
В качестве видеокамеры, выполненной с возможностью получения видеопотока сверхвысокой четкости, может быть применена «экшн камера» модели YI 4К+.(Экшн камера YI 4К+ // YI. URL: http://www.yitechnology.ru/yi-4k-plus-action-camera-specs (дата обращения: 12.12.2019)); в качестве микроконтроллера может быть использована любая известная микросхема, построенная на микропроцессорном ядре Cortex-M0 или Cortex-M4F/R, причем последнее из них специально ориентировано на создание высокопроизводительных систем реального времени для авиации и других ответственных применений. В качестве такой микросхемы может быть применен отечественный микроконтроллер K1921BK01T (Практический курс микропроцессорной техники на базе процессорных ядер ARM-Cortex-M3/M4/M4F [электронный ресурс]: учебное пособие – электрон. текстовые дан. (12 Мб) / В.Ф. Козаченко, А.С. Анучин, Д. И. Алямкин и др.; под общ. ред. В.Ф. Козаченко. – М.: Издательство МЭИ, 2019. – 543 с. Режим доступа: http://motorcontrol.ru/wp-content/uploads/2019/04/Практический_ курс_микропроцессор.pdf.); в качестве Wi-Fi-модуля может быть использована сборка ESP8266-01 (Модуль ESP8266-01 WiFi // MCU Store. URL: https://mcustore.ru/store/moduli-svyazi/modul-wifi-esp8266/?gclid=CjwKCAiA58fvBRAzEiwAQW-hzezFoQo60DEhZStdn7fMT-5DeNRZ2oJB_f8dkNm5re0i2KG bfe3YFBoCu08QAvD_BwE.), а в качестве TFT-дисплея модель RPI LCD (3.2 inch RPi LCD// ChipDip.ru URL: https://www.chipdip.ru/product/3.2inch-rpi-lcd-b (дата обращения: 12.12.2019)) с резистивным сенсорным экраном и диагональю 8,1 см.
Узел мониторинга состояния стальных канатов грузоподъемных механизмов различного назначения работает следующим образом.
Первоначально корпус 1 узла мониторинга монтируют на кронштейне 2, закрепляя последний на стене лифтовой шахты и ориентируя видеокамеру 3 на канат грузоподъемного механизма, в частности лифта, мониторинг которого предполагается осуществлять с помощью устройства. После активации блока управления с помощью кнопочной клавиатуры 18 и TFT-дисплея 17 производят калибровку устройства, заключающуюся в настройке режимов съемки видеокамеры 3, и конфигурировании параметров Ethernet-контроллера 12 и Wi-Fi-модуля 16 для осуществления обмена данными между микроконтроллером 4 и удаленной системой мониторинга лифтового оборудования. Конфигурирование параметров Ethernet-контроллера 12 и Wi-Fi-модуля 16 включает в себя выбор способа шифрования данных (предпочтительным является шифрование WPA2) и ввод ключа безопасности сети. В SD-карту 19 записывают изображения-эталоны проекций поврежденных стальных канатов, после чего SD-карту 19 устанавливают в гнездо модуля подключения 15 SD-карты. После выполнение указанных действий устройство готово к работе.
При работе устройства блок управления с помощью видеокамеры 3 осуществляет непрерывную съемку стального каната и передачу полученных кадров микроконтроллеру 4. Последний на основе управляющей программы, хранящейся во FLASH-памяти программ 7, используя в качестве буфера для данных SRAM-память 6, выполняет предварительную обработку изображений, осуществляя их цифровую фильтрацию, например, на основе билатерального фильтра, позволяющего сглаживать изображения, устраняя шумы. Далее микроконтроллер 4 последовательно сравнивает изображение стального каната с изображениями-эталонами, хранящимися на SD-карте 19 устройства, осуществляя распознавание изображений, полученных от видеокамеры 3 и определение вида повреждения каната.
Решение задачи распознавания изображений при этом может быть разделено на два этапа, первый из которых представляет собой процедуру семантической сегментации, обеспечивающей выделение областей интереса на изображениях, а второй сравнение изображений, полученных от видеокамеры 3 с классификатором, представляющим собой упорядоченное множество изображений-эталонов, характеризующих дефекты лифтовых кабелей.
Процедура семантической сегментации, выполняемая как на этапе обучения классификатора, так и на этапе распознавания изображений, может осуществляться как на уровне отдельных пикселей, так и на основе построения на множестве пикселей изображения замкнутых изолиний на некоторой высоте h, под каждой из которых понимается геометрическое место точек (x, y), при котором соблюдается условие f(x, y) = h. В данном случае под высотой h понимается яркость пикселя I, которая может варьироваться в пределах от 0, что соответствует черному пикселю, до 255, что соответствует белому пикселю, при этом I = h = f(x, y). Таким образом, на исходном растровом изображении, например на основе алгоритма «движущиеся квадраты», строится карта высот L, состоящая из n замкнутых изолиний Lj(X, Y)∈L, где X×Y – множество упорядоченных пар  координат опорных точек каждой изолинии Lj(X, Y). При этом для улучшения качества изолиний может применяться интерполяция их сегментов с использованием сплайнов первого или второго порядка.
координат опорных точек каждой изолинии Lj(X, Y). При этом для улучшения качества изолиний может применяться интерполяция их сегментов с использованием сплайнов первого или второго порядка.
Для обучения классификатора определен вектор Q количественных признаков каждой из выделенных изолиний Lj(X, Y), характеризующих один из возможных дефектов стального каната, состоящий из следующих элементов:
- q 1 – площадь фигуры, ограниченной линией;
- q 2 – периметр фигуры, ограниченной линией;
- q 3 – отношение средней интенсивности внутри и снаружи замкнутой линии;
- q 4 − разность интенсивностей вдоль внешней и внутренней границ замкнутой линии.
Для классификации дефектов выделено множество R видов возможных дефектов стального каната, состоящее из следующих элементов:
- r 1 – обрыв проволок внешней свивки;
- r 2 – петлеобразный выход проволок свивки в одной или нескольких прядях;
- r 3 – двусторонне уменьшение или увеличение диаметра каната;
- r 4 – одностороннее уменьшение или увеличения диаметра каната;
- r 5 – волнистость каната;
- r 6 – залом (перегиб) каната;
- r 7 – выдавливание пряди внешней свивки;
- r 8 – выдавливание сердечника;
- r 9 – перекручивание каната.
Таким образом, каждое изображение-эталон дефекта dj∈D, где j ∈ [1..m], а m – объем множества  изображений-эталонов, характеризуется вектором
изображений-эталонов, характеризуется вектором  где
где  изолиния j-го изображения-эталона дефекта,
изолиния j-го изображения-эталона дефекта,  вектор Q количественных признаков изолинии
вектор Q количественных признаков изолинии 
Для реализации функции распознавания образов может быть применена нейронная сеть, обучение которой целесообразно провести на основе выборочной совокупности дефектов канатов, классифицированных на основе приведенной выше структуры классификатора изображений-эталонов дефектов.
Формально функция обучения может быть записана в виде  где z – функция отклика, D – обучающая выборка. При этом изолинии
где z – функция отклика, D – обучающая выборка. При этом изолинии  и соответствующие им векторы количественных признаков, характеризующих один из возможных дефектов каната
и соответствующие им векторы количественных признаков, характеризующих один из возможных дефектов каната  при обучении вычисляются на основе автоматического анализа обучающих изображений, а признак zj, определяющий вид возможного дефекта, устанавливает специалист на основе визуальной оценки упомянутых изображений.
при обучении вычисляются на основе автоматического анализа обучающих изображений, а признак zj, определяющий вид возможного дефекта, устанавливает специалист на основе визуальной оценки упомянутых изображений.
Формально функция распознавания образов, на основе обученной нейронной сети может быть записана в виде  где
где  соответственно, множество изолиний, обнаруженных на изображении, полученном от видеокамеры 3, и соответствующих им векторов количественных признаков, характеризующих один из возможных дефектов каната, а z – выявленный вид возможного дефекта.
соответственно, множество изолиний, обнаруженных на изображении, полученном от видеокамеры 3, и соответствующих им векторов количественных признаков, характеризующих один из возможных дефектов каната, а z – выявленный вид возможного дефекта.
На основе конструкции устройства, приведенного выше, для распознавания дефектов канатов применим также алгоритм распознавания образов, основанный на сравнении изображений, получаемых от видеокамеры 3 с эталонными изображениями уменьшенной размерности.
При сравнении изображений, полученных от видеокамеры 3, с изображениями-эталонами, микроконтроллер 4 на основе управляющей программы предварительно осуществляет уменьшение их размерности, а затем сравнивает изображение уменьшенной размерности, полученное от видеокамеры 3, с i-м изображением-эталоном уменьшенной размерности, включенным в j-класс, при этом j∈[1..9]. Сравнение осуществляется путем вычисления среднеквадратической разности для пары изображений, по формуле:

где s – среднеквадратическая разность; n – количество пикселов сравниваемых изображений (для размерности 32x32 пикселей это значение составит 3072); xi, – значение яркости i-го пикселя изображения, полученного от видеокамеры 3; yji – значения яркости i-го пикселя j-го эталона, входящего во множество R.
Далее выполняют сравнение полученной среднеквадратической разности с 5% порогом, в случае если этот порог не превышен, считают изображения идентичными, а дефект найденным и с помощью Ethernet-контроллера 12 и Wi-Fi-модуля 16 передают информацию об обнаруженном повреждении удаленной системе обеспечения безопасности лифтового оборудования.
Таким образом, рассмотренное в настоящей заявке устройство является высокоэффективным прибором, обеспечивающим возможность постоянного автоматического контроля состояния стальных канатов грузоподъемных механизмов различного назначения, что позволяет значительно повысить уровень безопасности использования лифтов.
Устройство обеспечивает надежный мониторинг состояния стального каната, как части грузоподъемного механизма, в том числе лифтов промышленного и гражданского назначений, талевых систем, различных видов кранов, тельфов, стрел, грейферов, буровых машин и другого оборудования, при этом детекция повреждений происходит непосредственно при эксплуатации стального каната при его движении с максимальной скоростью до 16 м/с.
Список использованных источников
1. Дворник A.П., Дакуко H.A., Микула С. Исследование несущей способности шахтных канатов и разработка методики расчета их предельного состояния // Горная механика. 1998. № 1. С. 3-7.
2. RU2739815C1 Российская Федерация, СПК D07B 9/00, F16G 9/00, опубл. 28.12.2020. Несуще-тяговый канат кольцевой подвесной канатной дороги с промежуточными опорами и способ его дефектоскопии / Короткий А. А. (RU), Панфилов А. В. (RU),
Колганов В. П. (RU), Третьяков А.П. (RU), Финк С. А. (RU) ; заявитель и патентообладатель Короткий Анатолий Аркадьевич (RU) ; №2020116047 ; заявл. 27.04.2020 ; опубл. 28.12.2020, Бюл. №1, 18 с. ; 3 ил.
3. RU2330806C9 Российская Федерация, МПК B66B 5/00, опубл. 10.08.2008. Устройство и способ мониторинга системы подвешивания кабины лифта и узел системы подвешивания кабины лифта / Веронези Уильям А. (US), Стаки Пол А. (US) ; заявитель и патентообладатель Отис Элевейтэ Кампэни (US) ; №2006136397/11 заявл. 16.03.2004 ; опубл. 10.08.2008, Бюл. №22, 14 с. ; 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронная визитная карта и способ ее изготовления | 2023 |
|
RU2828382C2 |
| Способ производства колеровочной пасты | 2021 |
|
RU2782020C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| Способ передачи данных с использованием штрихкодирования | 2020 |
|
RU2820463C2 |
| ВРАЩАЮЩАЯСЯ НАКЛОННАЯ БАРАБАННАЯ ПЕЧЬ ДЛЯ ОКИСЛИТЕЛЬНОЙ ОБРАБОТКИ МОДИБДЕНСОДЕРЖАЩИХ МАТЕРИАЛОВ | 2020 |
|
RU2746077C1 |
| Автономный павильон ожидания пассажирского транспорта | 2022 |
|
RU2782655C1 |
| Узел выпуска и дожигания газов | 2022 |
|
RU2805103C1 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ОТРАБОТКИ ТЕХНОЛОГИЧЕСКОГО РЕГЛАМЕНТА ПЕРЕРАБОТКИ ОТРАБОТАННЫХ НИКЕЛЬСОДЕРЖАЩИХ КАТАЛИЗАТОРОВ | 2020 |
|
RU2753993C1 |
| БЕСПИЛОТНАЯ ЛЕТАЮЩАЯ ПЛАТФОРМА ВЕРТОЛЕТНОГО ТИПА ДЛЯ ПОЖАРОТУШЕНИЯ | 2022 |
|
RU2781919C1 |
| ЗАТВОР КОНЦЕВОЙ БАЙОНЕТНЫЙ | 2021 |
|
RU2756799C1 |
Изобретение относится к контрольным устройствам. Узел мониторинга состояния стальных канатов грузоподъемных механизмов различного назначения содержит корпус, смонтированный на наклонно-поворотном кронштейне, закрепленном на стене лифтовой шахты. На внешней поверхности корпуса закреплена видеокамера, подключенная к блоку управления. Блок управления размещен внутри корпуса и выполнен на основе микроконтроллера, содержащего микропроцессорное ядро, соединенное с помощью системной шины с USB-контроллером, Ethernet-контроллером, модулем LCD-интерфейса, интерфейсом ввода-вывода общего назначения, сгруппированного в восьмиразрядный GPIO-порт ввода-вывода, и модулем подключения SD-карты. К USB-контроллеру подключен блок управления. Ethernet-контроллер подключен к Wi-Fi-модулю. К модулю LCD-интерфейса подключен TFT-дисплей. К GPIO-порту подключена кнопочная клавиатура. В слот модуля подключения SD-карты вставлена и электрически соединена с модулем SD-карта. Обеспечивается беспрерывный бесконтактный мониторинг. 6 з.п. ф-лы, 3 ил.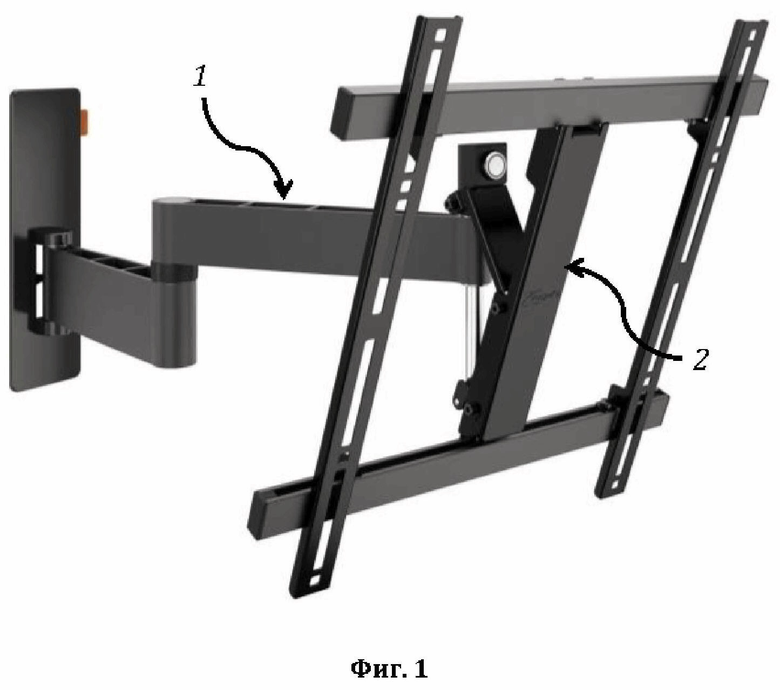
1. Узел мониторинга состояния стальных канатов грузоподъемных механизмов различного назначения, содержащий корпус, смонтированный на наклонно-поворотном кронштейне, закрепленном на стене лифтовой шахты, при этом на внешней поверхности корпуса закреплена видеокамера, снабженная USB-выходом и подключенная с помощью USB-кабеля к видеовходу блока управления, отличающийся тем, что блок управления устройством размещен внутри корпуса и выполнен на основе микроконтроллера, содержащего микропроцессорное ядро, соединенное с помощью системной шины с периферийными устройствами микроконтроллера: USB-контроллером, Ethernet-контроллером, модулем LCD-интерфейса, интерфейсом ввода-вывода общего назначения, сгруппированного в восьмиразрядный GPIO-порт ввода-вывода, и модулем подключения SD-карты; к USB-контроллеру подключен видеовход блока управления, Ethernet-контроллер подключен к Wi-Fi-модулю, к модулю LCD-интерфейса электрически подключен TFT-дисплей, к восьмиразрядному GPIO-порту ввода-вывода подключена кнопочная клавиатура, а в слот модуля подключения SD-карты вставлена и электрически соединена с модулем SD-карта.
2. Узел мониторинга по п.1, отличающийся тем, что микропроцессорное ядро микроконтроллера построено на основе гарвардской архитектуры и включает в себя SRAM-память данных, FLASH-память программ и регистры общего назначения, подключенные к арифметико-логическому устройству ALU, при этом к регистрам общего назначения напрямую подключена SRAM-память данных, а через регистр команд подключена FLASH-память программ.
3. Узел мониторинга по п.1, отличающийся тем, что видеокамера выполнена с возможностью получения видеопотока сверхвысокой четкости.
4. Узел мониторинга по п.3, отличающийся тем, что в качестве видеокамеры применена камера модели YI 4К+.
5. Узел мониторинга по п.1, отличающийся тем, что в качестве микроконтроллера применен отечественный микроконтроллер K1921BK01T.
6. Узел мониторинга по п.1, отличающийся тем, что в качестве Wi-Fi-модуля использована сборка ESP8266-01.
7. Узел мониторинга по п.1, отличающийся тем, что в качестве TFT-дисплея применена модель RPI LCD с резистивным сенсорным экраном и диагональю 8,1 см.
| УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА СИСТЕМЫ ПОДВЕШИВАНИЯ КАБИНЫ ЛИФТА И УЗЕЛ СИСТЕМЫ ПОДВЕШИВАНИЯ КАБИНЫ ЛИФТА | 2004 |
|
RU2330806C9 |
| US 10634484 B2, 28.04.2020 | |||
| CN 111238710 A, 05.06.2020 | |||
| US 10830655 B2, 10.11.2020 | |||
| US 20200333202 A1, 22.10.2020. | |||

