Изобретение относится к системе транспорта.
Известно парусно-моторное судно, содержащее мачты, паруса, двигатель внутреннего сгорания, гребные винты, электрические лебедки для поворота парусов (Патент России 2258636). Недостатком известного устройства является недостаточная площадь парусности. Судно неустойчиво, от ветра наклоняется в стороны. Паруса недостаточно улавливают потоки ветра.
Целью изобретения является экономия энергии, расширение технологических возможностей, увеличение площади парусности, улучшение устойчивости судна от наклона ветром, повышение скорости хода судна и возможности коррекции управления движением судна при помощи спутниковой навигации.
Поставленная цель достигается тем, что все паруса снабжены солнечными батареями, которые соединены с электрическими двигателями гребных винтов, лебедок при помощи электрической цепи. К каждой мачте с двух сторон шарнирно закреплены рамы с парусами, рамы могут быть выполнены в форме прямоугольника, либо треугольники, либо трапеции, либо сектора. Рамы могут содержать откосы, выполнены поворотными. Рамы соединены между собой и лебедками, выполнены складными с возможностью поворота рам с парусами для увеличения или уменьшения парустности и улучшения улавливания ветра и сокращения сопротивления судна. Ширина рам парусов больше, чем ширина палубы судна, нижний конец рам парусов установлен в направляющих при помощи роликов, направляющие расположены на поверхности палубы судна и над поверхности воды, выполнены в форме колец. Они описывают траекторию перемещения поворота рам, направляющие, расположенные над водой, опираются на палубу и стены судна при помощи откосов и поплавков на поверхность воды, выполненных в форме цилиндров с конусами обтекаемой формы, с возможностью уменьшения сопротивления. Регулятор управления парусным вооружением снабжен радиокомпасом, стрелка индикатора выполнена из постоянного магнита, на шкале расположены герконы, они соединены с электрическими двигателями (рулевого управления, гребных винтов, лебедок поворота рам парусов) при помощи электрической цепи, выполнены с возможностью коррекции управления движением судна по заданному курсу при помощи спутниковой навигации
Устройство может быть выполнено во втором варианте. Второй вариант такой же, как первый, отличается от него тем, что содержит парные, горизонтальные, параллельные направляющие, расположенные на разных уровнях, в них закреплены подвижные парусные ленты при помощи роликов. Оси роликов соединены с парусной лентой при помощи подпружиненных тяг, а между собой - при помощи канатов и выполнены с возможностью автоматического управления парусным вооружением, заключающегося в перемещении парусных лент вдоль направляющих в горизонтальной плоскости путем сматывания их на катушки барабанов при возникновении шторма или ветра, дующего в нос или борта судна, и перемещении после шторма или направления ветра, дующего в корму, для придания вогнутой поверхности парусов для улучшения улавливания ветра и изменения направления бокового ветра в надлежащую сторону, попутную движению судна, для повышения скорости хода судна и повышения КПД, преобразования напора и силы ветра в энергию движения судна. Направляющие могут быть выполнены в форме одной или нескольких дуг или в форме уголков со скругленными углами, или прямоугольника, или трапеции и соединены между собой при помощи опорных стоек. Опорные стойки могут быть расположены вертикально или под наклоном, они соединены с палубой судна при помощи растяжек, выполнены с возможностью придания устойчивости противостоянию напору и силе ветра.
Новизна заявленного технического решения по сравнению с патентом 2258636 заключается в том, что за счет рам, выполненных в форме прямоугольника, либо треугольника, либо трапеции, либо в форме сектора, обеспечивается расширение технологических возможностей.
За счет рам, навешенных на мачты с двух сторон при помощи шарниров, обеспечивается поворот парусов под надлежащим углом наклона для увеличения или уменьшения парусности и улучшения улавливания потоков ветра для преобразования его в энергию движения судна.
За счет увеличения ширины парусов больше ширины палубы судна обеспечивается увеличение парусности судна.
За счет установки концов рам в направляющие при помощи роликов, где направляющие выполнены в форме швеллерных колец, обеспечивается улучшение и долговечность конструкций, устойчивостью рам при их повороте и устойчивость судна от наклона ветром и увеличение парусности и улучшение надежности.
За счет откосов и поплавковых опор обеспечивается увеличение длины парусов и парусности, улучшение надежности и долговечности крепления направляющих над поверхностью воды.
За счет роликов и направляющих обеспечивается поворот и перемещение рам не только над поверхностью палубы, но и над поверхностью воды.
За счет регулятора управления, снабженного радиокомпасом и стрелкой индикатора из постоянного магнита и герконами, обеспечивается автоматическая координация и коррекция управления движением судна по заданному курсу при помощи спутниковой навигации.
За счет соединения парусных лент друг с другом и с электрическими лебедками обеспечивается возможность устанавливать надлежащий угол одновременно между плоскостями парусов для лучшего улавливания ветра парусами.
За счет парусов, снабженных солнечными батареями, обеспечивается прямое преобразование солнечной энергии в электрическую энергию для питания электрических двигателей гребных винтов и преобразование ее в механическую энергию при помощи электрических двигателей и гребных винтов
За счет подвижных лент парусов в направляющих, расположенных на палубе и над поверхностью воды, придается парусам вогнутая поверхность, обеспечивается улучшение улавливания ветра и изменения направления бокового ветра и изменения в надлежащую сторону, попутную движению судна, для повышения скорости хода судна и повышения КПД и преобразования напора и силы ветра в энергию движения судна.
При исследовании заявленного технического решения по патентным, научным, научно-техническим материалам не обнаружена такая совокупность признаков, что позволяет судить о существенности заявленных признаков.
Сущность изобретения поясняется чертежами, где:
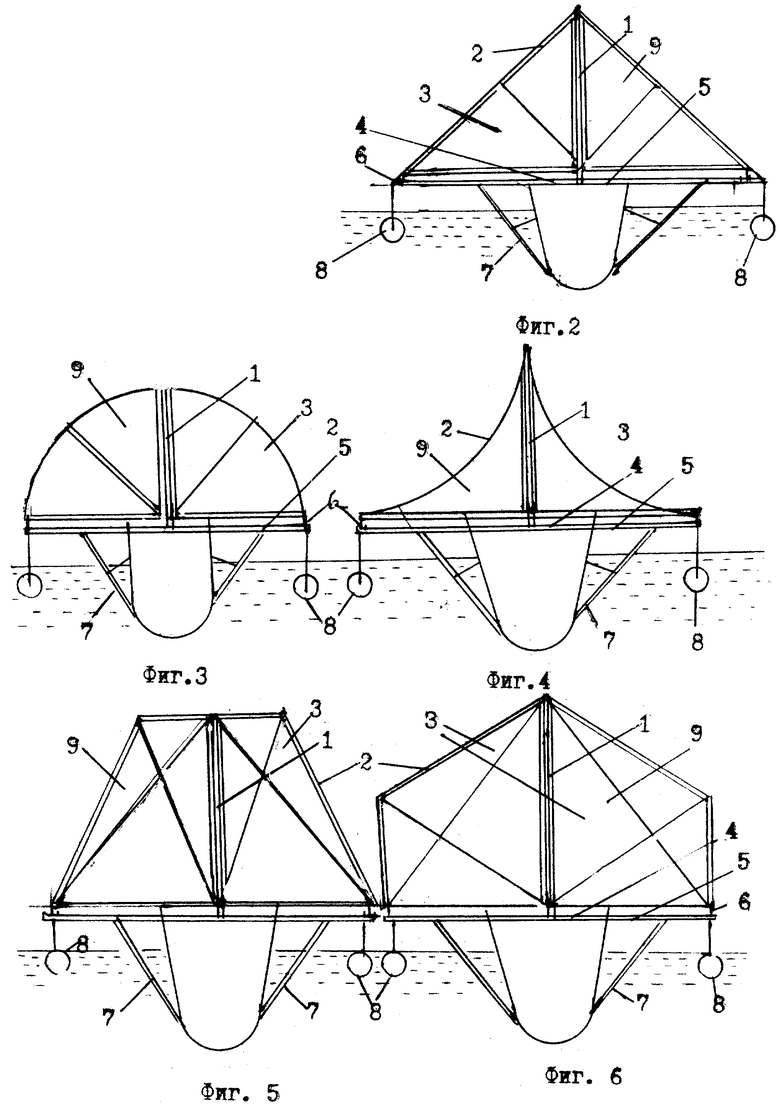
На фиг.1 изображено поперечное сечение судна с прямоугольными парусами;
На фиг.2 - то же, с треугольными парусами;
На фиг.3 - то же, с полукруглыми парусами;
На фиг.4 - то же, с треугольными вогнутыми парусами;
На фиг.5 и 6 - то же, с выполненными в форме трапеций;
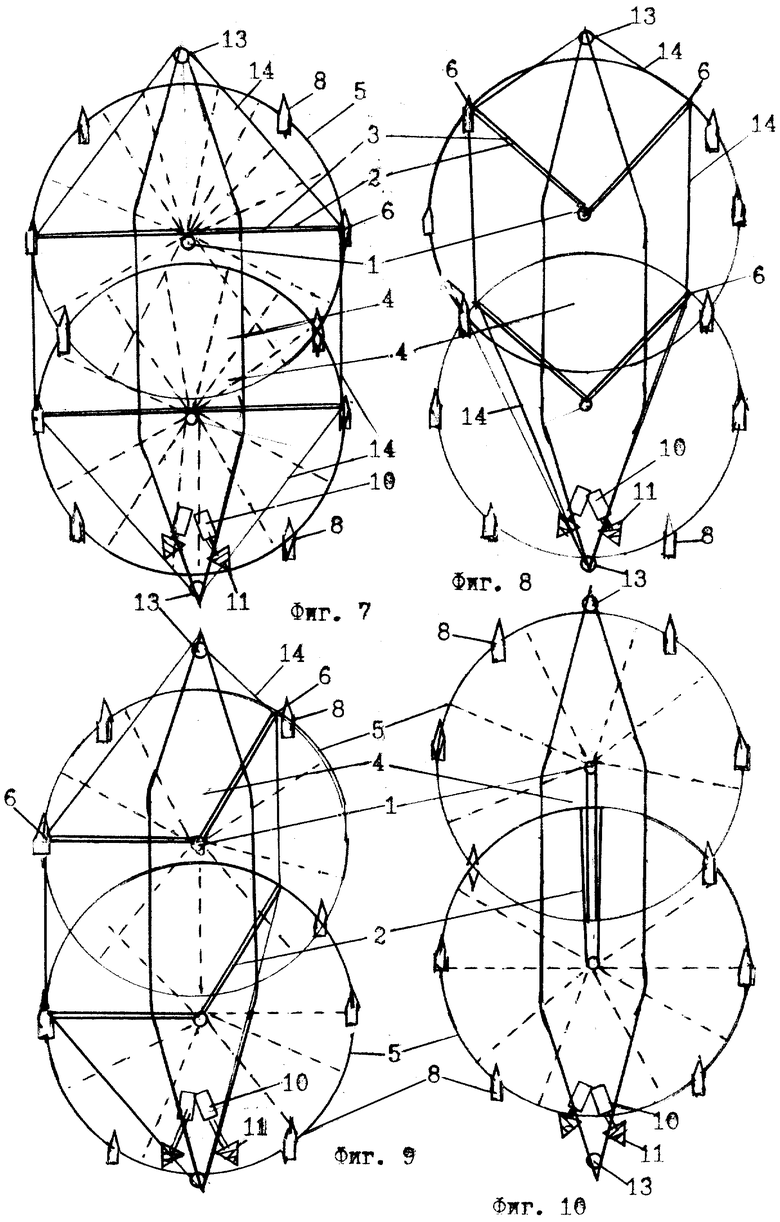
На фиг.7 схематично изображено судно вид сверху с парусами, расположенными перпендикулярно продольной оси симметрии судна;
На фиг.8 и 9 - то же, паруса расположены под разным углом наклона к продольной оси симметрии;
На фиг.10 - то же, паруса параллельно и плотно сложены друг с другом во время шторма или ветра, дующего в нос судна;
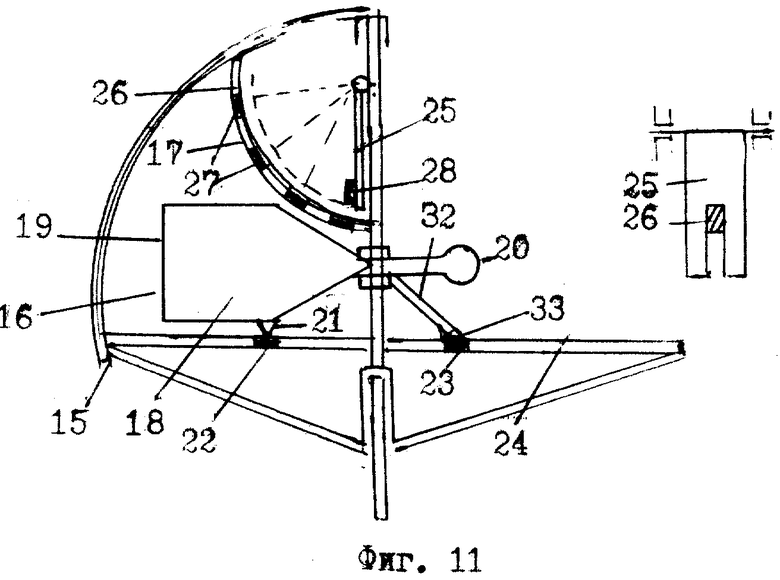
На фиг.11 изображена схема устройства регулятора парусного вооружения, вид с боковой стороны;
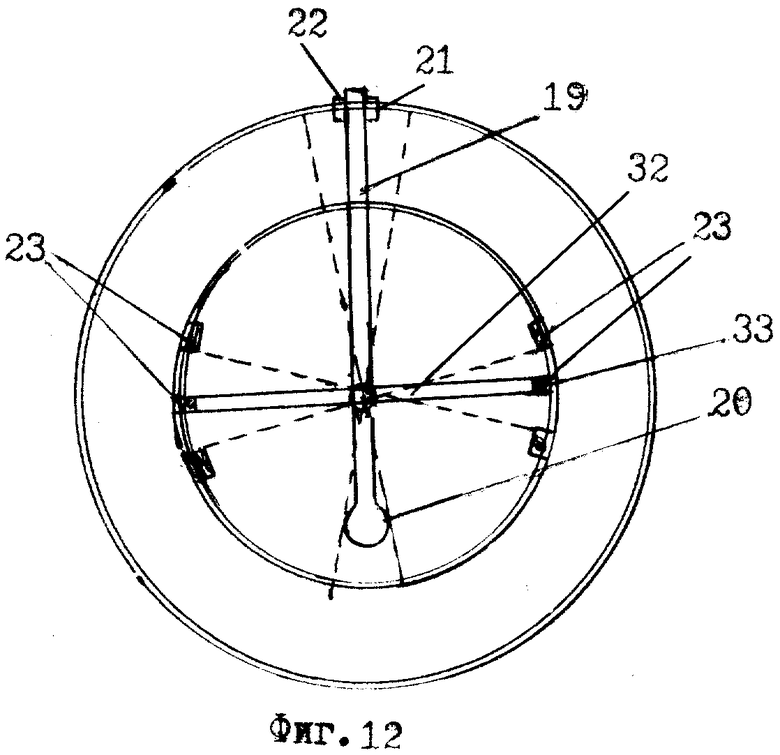
На фиг.12 - то же, вид сверху;
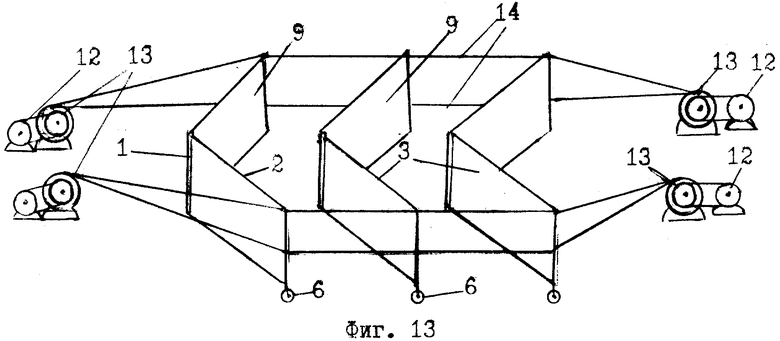
На фиг.13 схематично изображены повороты прямоугольных парусов, вид с боковой стороны.
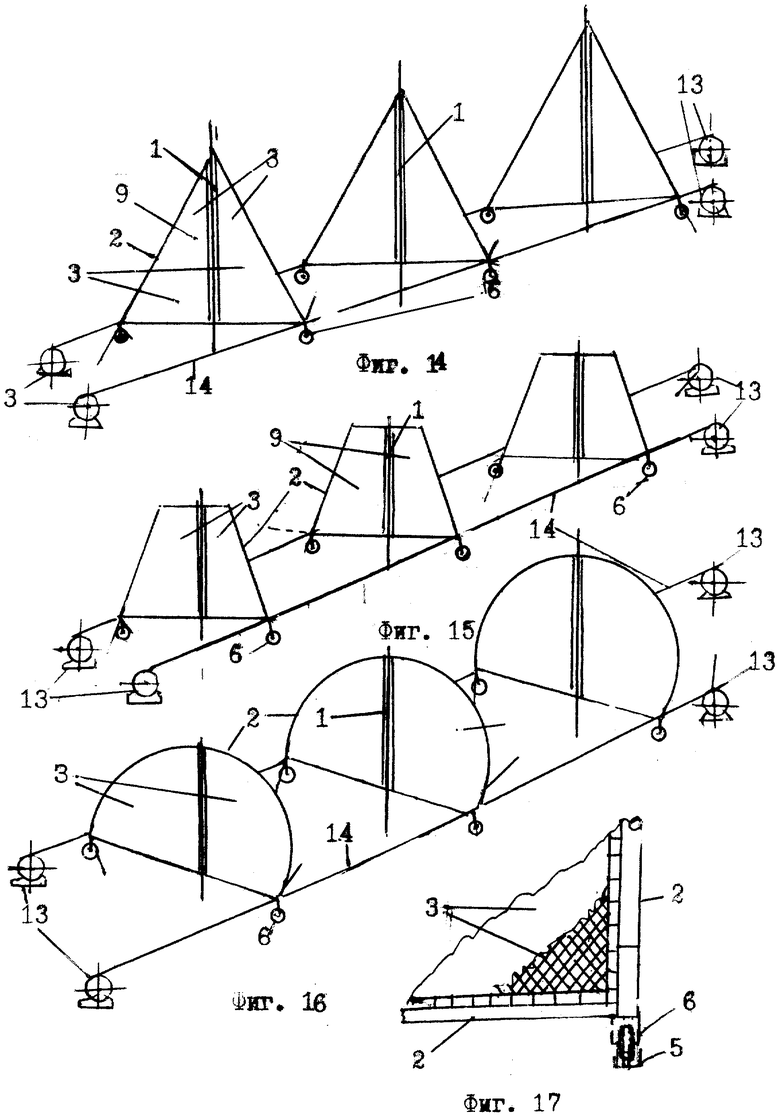
На фиг.14 - то же, повороты треугольных парусов;
На фиг.15 - то же, трапециевидных парусов;
На фиг.16 - то же, секторных парусов;
На фиг.17 изображена установка конца рам в направляющие при помощи роликов;
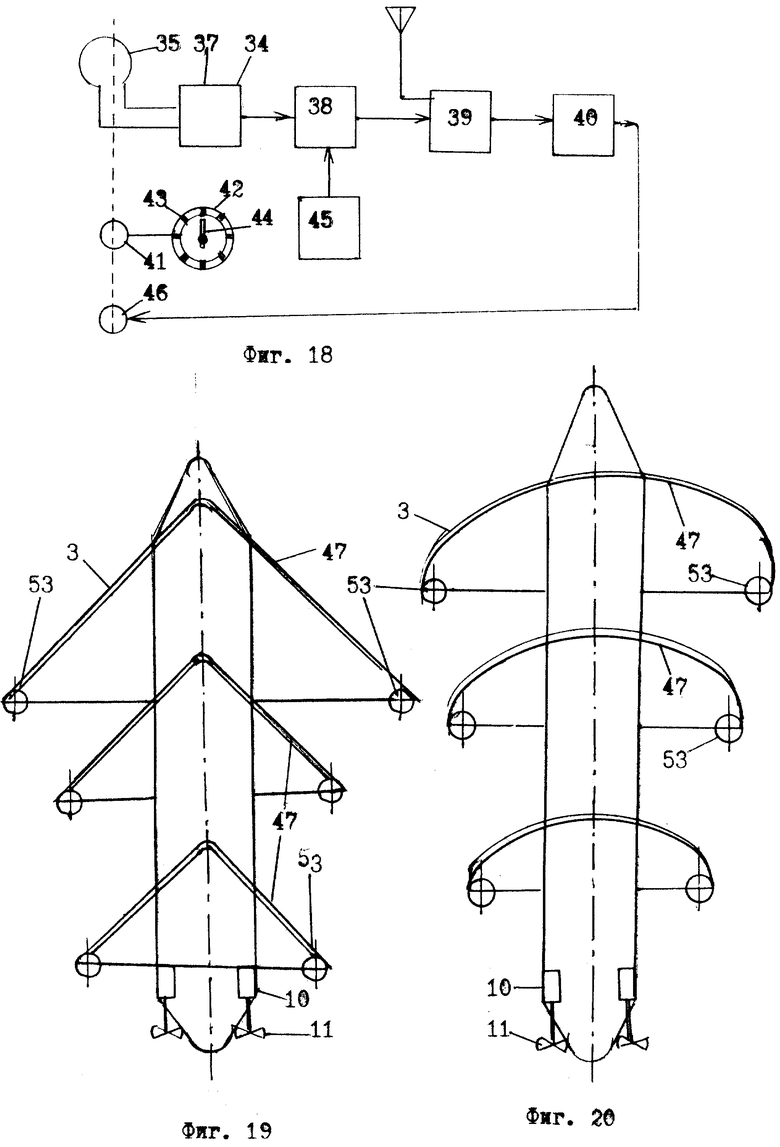
На фиг.18 изображена схема устройства радиокомпаса;
На фиг.19 изображено судно с ленточными парусами, расположенными в направляющих, выполненных в форме уголков, вид сверху;
На фиг.20 и 21 - то же, выполненных в форме дуг разных размеров;
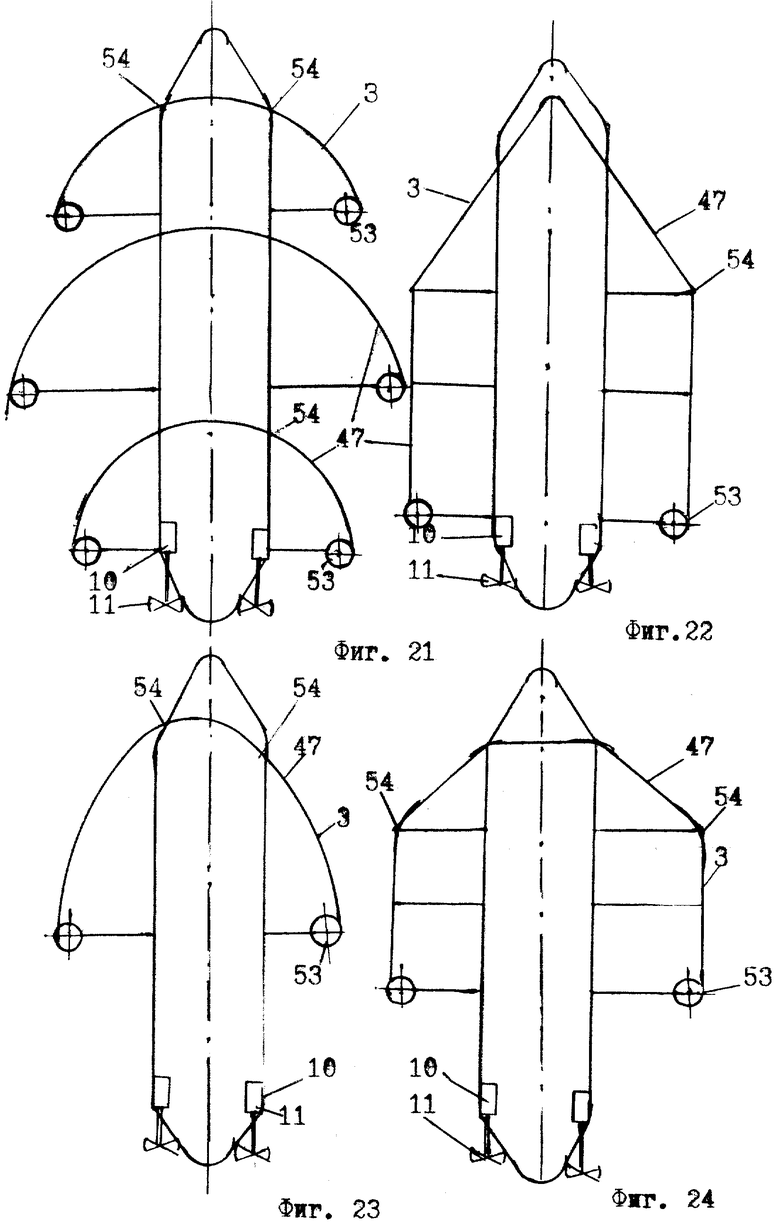
На фиг.22 и 24 - то же, выполненных в форме трапеции;
На фиг.23 - то же, выполненных в форме дуг эллипса;
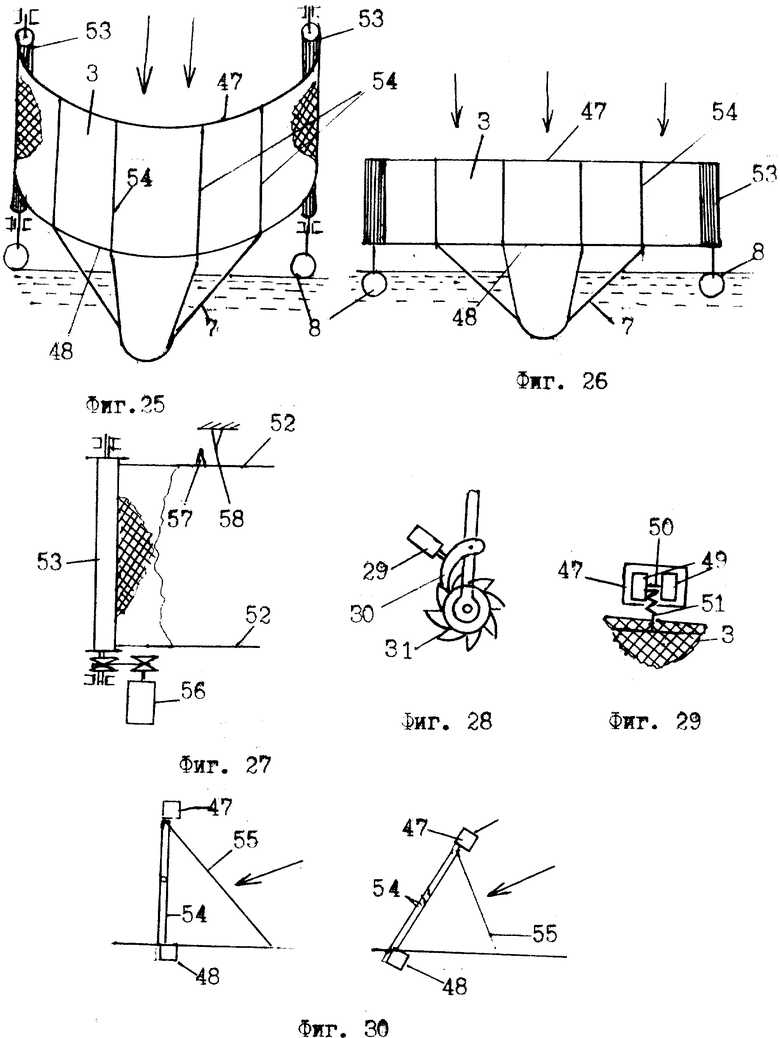
На фиг.25 изображен поперечный разрез судна с передней стороны, выполненных в форме кольцевых ленточных парусов;
На фиг.26 - то же, вид прямоугольных ленточных парусов;
На фиг.27 изображена катушка барабанов с намотанными ленточными парусами и электрическим приводом;
На фиг.28 изображено устройство храпового механизма;
На фиг.29 изображено крепление роликов в направляющих;
На фиг.30 изображено креплении опорных с стоек на направляющих.
Судно снабжено мачтами 1. На каждой мачте 1 с двух сторон шарнирно закреплены рамы 2 с парусами 3. Рамы 2 с парусами 3 могут быть выполнены в форме прямоугольника (фиг.1), либо треугольника (фиг.2), либо полукруга (фиг.3), либо в форме треугольника с вогнутыми в форме дуги сторонами (фиг.4), либо в форме трапеции (фиг.5 и 6). Рамы 2 с парусами 3 выполнены поворотными и складными, они складываются параллельно друг другу в центре судна параллельно продольной оси симметрии судна за мачтами 1 во время шторма или ветра, дующего прямо (или под углом) в нос судна, могут поворачиваться вокруг мачт на 360 градусов в разные стороны с образованием надлежащего угла между плоскостями парусов для увеличения или уменьшения площади парусности и улучшения улавливания ветра с преобразованием его в энергию движения судна. Ширина рам 2 парусов 3 больше ширины палубы 4 судна. Нижний конец рам 2 парусов 3 (фиг.17) установлен на направляющих 5 при помощи роликов 6. Направляющие 5 выполнены в форме кольца из швеллера. Кольца направляющих 5 расположены на поверхности палубы и над поверхностью воды. Часть направляющих 5, которые расположены над поверхностью воды, опираются на опорные стойки 7 откосы, закрепленные на боковых стенах судна, и на поплавки 8, выполненные в форме цилиндра, снабженного конусом, выполненного с возможностью улучшения устойчивости судна от наклона ветром и уменьшения сопротивления конусами поплавков 8. Все паруса 3 снабжены солнечными батареями 9, которые соединены с электрическими двигателями 10 гребных винтов 11 и электрическими двигателями 12 лебедок 13. Выполнены с возможностью преобразования солнечной энергии в электрическую энергию для питания электрических двигателей 10 и 12 для преобразования ее в механическую энергию для вращения гребных винтов 11 и лебедок 13. Все рамы 2 соединены между собой и лебедками 13 при помощи тросов 14 или гибких тяг. На неподвижной опоре установлен регулятор 15 управления парусным вооружением, он снабжен датчиком направления 16 и силы 17 ветра. Выполнен в форме флюгера 18. Флюгер 18 состоит из пластины 19 и противовеса 20, жестко соединенных между собой и установленных на вертикальную ось.
Флюгер 18 поворачивается вокруг своей оси при помощи пластины 19 потоком ветра. В нижнем основании пластины 19 установлен постоянный магнит 21. Выполнен в форме конуса. Постоянный магнит 21 взаимодействует с герконами 22 и 23, выполненными в форме герконов. Герконы 22 и 23 расположены на пластинчатой кольцевой неподвижной опоре 24, установленной под пластиной 19 под постоянным магнитом 21. Герконы 22 и 23 ориентируются на направление движения судна. Датчик 17 силы ветра содержит поворотную пластину 25, дугу 26 с указанием скорости ветра, на ней жестко закреплены герконы 27, а на пластине 25 жестко закреплен постоянный магнит 28, выполненный с возможностью взаимодействия магнитным полем с герконам 27 и размыкания электрической цепи, питающей соленоид 29 собачки 30 храпового механизм 31, расположенных в лебедках 13, и замыкания электрической цепи электрического двигателя лебедок 13. Оси флюгера 17 жестко соединены со штифтом 32. На пластине 25 флюгера 18 и конце штифта 32 расположена стрелка 33 постоянного магнита, взаимодействующая с герконами 23, расположенными на наружном и внутреннем кольце. Регулятор 15 управления парусным вооружением снабжен радиокомпасом 34. Радиокомпас 34 состоит из рамочной 35 и ненаправленной (спутниковой) антенны 36, усилителя канала рамки 37, коммутатора фаз 38, радиоприемника 39, следящей системы 40, датчика угла поворота 41, индикатора 42, герконов 43, стрелки 44 индикатора 42, генератора низкой частоты 45 электрического двигателя 46 вращения рамки. Стрелка 44 индикатора 42 выполнены из постоянного магнита. По периметру шкалы индикатора 42 содержатся герконы 43. Герконы 43 соединены с электрическими двигателями 10 гребных винтов 11, электрическими двигателями лебедок 12 и электрическими двигателями руля (на чертеже не показано). Выполнены с возможностью передачи на голову руля усилий электрического двигателя. Поворот судна осуществляется при помощи совместных действий рулевого управления, гребных винтов 11 и парусов 3. Троса 14 снабжены кольцами, выполнеными съемными, на рамах 2 имеются крючки, снабженные винтовыми нарезами, на них навешиваются троса 14, они фиксируются гайками через шайбы /на чертеже не показано/.
Устройство может быть выполнено во втором варианте. Второй вариант такой же, как первый, отличается от него тем, что устройство снабжено парными, горизонтальными параллельными направляющими 47 и 48, расположенными на разных уровнях, в них закреплены подвижно ленты парусов 3 при помощи роликов 49. Оси 50 роликов 49 соединены с парусами 3 при помощи подпружиненных тяг 51, а между собой - при помощи канатов 52, выполнены с возможностью автоматического управления парусным вооружением, заключающимся в перемещении парусных лент 3 вдоль направляющих 47 и 48 в горизонтальном направлении путем сматывании их на катушки 53 барабанов при возникновении шторма или дующего в нос или борт судна и перемещении в исходное положение после шторма или направлении ветра, дующего в корму, для придания вогнутой поверхности для улучшения улавливания ветра и изменении бокового ветра в надлежащую сторону, попутную движению судна, для повышения скорости хода судна и повышения КПД преобразования напора и силы ветра в энергию движения судна. Направляющие 47 и 48 могут быть выполнены в форме одной или нескольких дуг или уголков со скругленными углами или трапеции. Направляющие 47 и 48 соединены между собой при помощи мачт 1 и опорных стоек 54. Опорные стойки 54 могут быть расположены вертикально или под надлежащим углом наклона в сторону палубы судна. Опорные стойки 54 соединены с палубой судна при помощи растяжек 55, выполненных с возможностью придания надежности и устойчивости им от напора ветра. Катушки барабанов 53 снабжены электрическими двигателями 56. На парусной ленте 3 содержатся зацепы 57, контактирующие с микропереключателями 58. Судно снабжено рулевым устройством, имеет кроме рулей приспособления, обеспечивающие возможность перекладки руля на надлежащий угол в заданный промежуток времени, приспособления для возможности ограничения углов перекладки для застопорения руля в любом его положении, а также возможности контроля из пункта управления судна в любом положении руля во время перекладки и имеет механизмы:
Рулевые приводы - осуществляющие передачу на голову руля усилий электродвигателя;
Рулевые двигатели и машины - выполняющие работы по перекладке руля;
Передачи - для управления с командного пункта рулевыми двигателями;
Указатели положения руля - возможность наблюдения за величиной угла перекладки руля (на чертеже не показано).
Устройство работает следующим образом. При курсе парусного судна: ФОРДЕВИД (фиг.7) попутный ветер дует в корму (в заднюю оконечность судна). Пластина 19 флюгера 18 датчика 16 направления ветра, регулятора 15 парусного вооружения поворачивается потоком ветра и противовес 20 устанавливается навстречу ветру. Рамы 2 с парусами 3 устанавливаются перпендикулярно продольной оси симметрии судна. Давление ветра воспринимается парусами 3, рамами 2, мачтами 1 и передается к корпусу судна по прямой линии по отношению продольной оси судна по отношению его движения. Парусное судно плывет по заданному курсу. Как только ветер изменит свое направление по отношению движения судна, штифт 32 поворачивается вокруг своей оси и своим постоянным магнитом, выполненным в форме стрелки, взаимодействует с герконом 23. Геркон 23 замыкает электрическую цепь, питающую электрический двигатель 12 лебедки 13, и электрический двигатель руля размыкает один электрический двигатель 10 гребного винта 11 при помощи совместных действий парусов 3, гребных винтов 11 и рулевого управления, судно поворачивается и движется по заданному курсу. При помощи лебедки 13 и тросов 14 все рамы 2 с парусами 3 поворачиваются одновременно под определенным углом наклона по кольцевым направляющим 5 при помощи роликов 6, например перпендикулярно по отношению продольной оси судна. Как только судно отклоняется от заданного курса, стрелка 44 индикатора 42 радиокомпаса 34 отклоняется и своим постоянным магнитом замыкает электрическую цепь, питающую электрический двигатель 12 лебедки 13 и электрический двигатель руля и один из электрических двигателей 10 гребных винтов 11. Парусное судно поворачивается и направляется по заданному курсу при помощи спутниковой навигации. При этом стрелка 44 индикатора 42 радиокомпаса 34 постоянно координирует и корректирует управление движением парусного судна и не дают большим отклонениям от заданного курса, а регулятор 15 управляет парусным вооружением, автоматически производит поворот рам 2 с парусами 3 и по мере необходимости направляет их в нужном направлении с целью лучшего улавливания потока ветра парусами, повышая КПД.
БАНШТАНГ - ветер дует под некоторым углом наклона к корпусу судна (фиг.8, 9). При изменении потока ветра по этому курсу регулятор 15 управления парусным вооружением при помощи датчика 16 направления ветра, пластина 19 флюгера 18 поворачивается вокруг своей оси и противовес 19 устанавливается навстречу потоку ветра и при помощи штифта 32 постоянным магнитом 33 взаимодействует с герконом 23. Герконы 23 замыкают электрическую цепь, питающую электрическую лебедку 13, она тросами 14 поворачивает одновременно все рамы 2 парусов 3 по направляющим 5 при помощи роликов 6 под определенным углом по отношению продольной оси судна. Сила давления ветра действует на паруса 3, рамы 2, мачты 1, передавая корпусу судна, и эта энергия преобразуется в энергию движения судна. Пластина 19 флюгера 18 поворачивается потоком ветра вокруг оси и противовес 20 устанавливается навстречу направлению ветра и своим постоянным магнитом 21 взаимодействует с герконом 22. Он размыкает электрическую цепь, питающую электрическую лебедку 13. Работа лебедки прекращается, таким образом регулятор 15 автоматически координирует повороты парусов 3 по направлению ветра для улучшения улавливания всеми парусами ветра путем замыкания электрической цепи герконов и постоянного магнита 21, где происходит взаимодействие постоянного магнита 21 с герконом 22 и размыкание электрической цепи при помощи пластины 19 флюгера 18 датчика 16 направления ветра. При этом рамы 2 парусов устанавливаются под определенным углом по отношению к продольной оси симметрии судна. Давление потока ветра воспринимается всеми парусами 3, рамами 2 и мачтами 1 и энергия передается к корпуса судна, преобразуется в энергию движения судна. При отклонении судна от курса радиокомпас автоматически передает направление на принимаемую радиостанцию, то есть угол между продольной осью судна и направлением на станцию. Сигнал пеленгуется радиостанцией (фиг.18), принимается рамочной антенной 35 после преварительного усиления усилителем 37 канала рамок, поступает в коммутатор 38 фазы и далее на выход радиоприемника 39 в контур сложения, куда подводится, кроме того, напряжение ненаправленной спутниковой антенны. 36. Коммутатор фазы 38 под воздействием напряжения низкой частоты местного генератора периодически изменяет фазу напряжения рамки в контуре сложения на 180 градусов. В результате в контуре сложения периодически, через каждую половину периода напряжения местного генератора, происходит то сложение, то вычитание напряжений рамочной 35 и ненаправленной 36 спутниковой антенн. Суммарное напряжение, действующее на входе радиоприемника, получается модулированным по амплитуде с низкой частотой местного генератора. Фаза, огибающая модулированные колебания, совпадает с фазой напряжения низкой часты или противоположна ей в зависимости от стороны отклонения рамки из положения нулевого приема. Глубина модуляции тем больше, чем больше отклонение рамки. В положении нулевого приема рамки модуляция отсутствует. На выходе приемника 39 радиокомпас 34 выделяет напряжение низкой частоты. Это напряжение поступает в следящую систему 40, посредством которой управляется двигатель 46 вращения рамочной антенны 35. Следящая система 40 автоматически устанавливает рамку 35 так, что минимум приема совпадает с направлением на пеленгуемую радиостанцию. С осью рамочной антенны 35 связан датчик электрической дистанционной передачи. Угол поворота рамки 35 передается индикатору 42. Угол поворота рамки 35 передается индикатору 42. Его стрелка 44 указывает по шкале, разделенной на 260 градусов, направление на радиостанцию по отношению к продольной оси судна.
ГАЛФИНД - ветер, дующий прямо или почти прямо в левый или правый борт судна. Регулятор 15 управления парусным вооружением срабатывает и подает звуковой и световой сигнал для обслуживающего персонала. Обслуживающий персонал расфиксирует троса 14, поворачивает все рамы 2 вдоль продольной оси судна параллельно друг другу с двух сторон за мачты и фиксируют в заданном положении. При этом сокращается резко сопротивление судна и при помощи электрического двигателя 10 и солнечных батарей 9 судно продолжает движение по заданному курсу при помощи гребных винтов 11.
ЛЕВИНТИНГ - ветер дует вдоль правого или левого галса. Пластины 19 флюгера 18 поворачиваются вокруг своей оси, постоянным магнитом 21 взаимодействует с герконом 22, он замыкает электрическую цепь, питающую электрический двигатель 12 лебедки 13. При этом лебедка 13 поворачивает рамы 2 с парусами 3 под небольшим углом по отношению к продольной оси симметрии судна для лучшего улавливания ветра. Как только рамы 2 переместятся до надлежащей точки, геркон 23 размыкает электрическую цепь, питающую электрические двигатели 12 лебедки 13. Работа электрического двигателя 12 прекращается. Перемещение рам 13 прекращается.
Днем электрические двигатели 10 гребных винтов 11 питаются от солнечных батарей 9, расположенных на парусах 3, а ночью питаются от электрического генератора (на чертеже не показано).
При возникновении шторма поток ветра дует и пластина 25 отклоняется и поворачивается под определенным углом выше предусмотренного уровня. Постоянный магнит 28 взаимодействует магнитным полем с герконом 27. Геркон 27 замыкает электрическую цепь, питающую звуковой и световой сигнал (на чертеже не показан) предупреждения опасности о надвигающемся шторме. Обслуживающий персонал расфиксирует и снимает троса 14 с рам 2, поворачивает рамы 2 с парусами 3 вдоль продольной оси судна с двух сторон параллельно друг другу за мачтами 1 и фиксируют в заданном положении.
Устройство может работать во втором варианте. Второй вариант такой же, как первый вариант, отличается от него тем, что при курсе парусного судна относительно ветра:
ФОРДЕВИД - попутный ветер дует в корму, в заднюю оконечность судна, при этом пластина 19 флюгера 18 поворачивается вокруг своей оси потоком ветра и устанавливается по направлению продольной оси судна противовесом 20 навстречу ветру. При повороте постоянный магнит 21 взаимодействует с герконом 22 и замыкает электрическую цепь, питающую электрический двигатель 56 катушки барабанов 53. Электрический двигатель 56 вращает катушку барабана 53 и при помощи канатов 52 перемещает ленты парусов 3 по направляющим 47 и 48 при помощи роликов 49 с другой катушки барабанов 53. Ленты парусов 3 натягиваются на направляющие 47 и 48 и приобретают в поперечном сечении форму одной или несколько дуг или форму уголка с округленными углами или форму трапеции. Как только конец парусной ленты 3 переместится до катушки барабана 53, зацеп 57 взаимодействует с микропереключателем 58. Микропереключатель 58 размыкает электрическую цепь, питающую электрический двигатель 56. Он прекращает работать. Перемещение лент прекращается. Давление и сила ветра воспринимается парусами, которые расположены не только на поверхности палубы судна, но и над поверхностью воды. Энергия ветра передается через паруса 3, мачты 1 корпусу судна и преобразуется в энергию движения судна по прямой линии по отношению продольной оси судна.
БАНШТАНГ - ветер дует под некоторым углом к корпусу судна. При изменении направления ветра по этому курсу пластина 19 флюгера 18 поворачивается вокруг своей оси потоком ветра и постоянным магнитом 21 взаимодействует с герконом 22. Геркон 22 замыкает электрическую цепь, питающую электрический двигатель 56 катушки барабана 53. Электрический двигатель 56 перемещает парусные ленты 3 при помощи катушки барабана 53. Как только зацеп 57 переместится до микропереключателя 58, микропереключатель 58 размыкает электрическую цепь, питающую электрический двигатель 56. Он прекращает работать и прекращается перемещение парусных лент 3 по направляющим 47 и 48. При этом открывается окно со стороны борта судна с одной стороны, с другой стороны натянута парусная лента, вогнутость парусной ленты обеспечивает улучшение улавливания ветра и изменения направления бокового ветра в надлежащую сторону, попутную движению судна, повышение скорости хода судна и повышению КПД, преобразованию напора и силы ветра в энергию движения судна.
ГАЛФИД - ветер, дующий прямо или почти прямо в левый или правый борт судна.
БЕЙДЕНВИГ - ветер, дующий в нос прямо или под острым углом по направлению движения судна. Если ветер справа, говорят - судно идет правым гласом, если ветер слева - левым гласом.
При курсах ГАЛФИД, БЕЙДЕНВИГ пластинка 19 флюгера 18 поворачивается вокруг своей оси и постоянным магнитом взаимодействует с герконом 23, он замыкают электрическую цепь, питающую электрический двигатель 56 первой катушки барабана 53. При этом электрический двигатель 56 вращает катушку барабана 53, парусная лента 3 наматывается на катушку барабана 53, перемещает в исходное положение. Как только будет намотана вся лента парусов 3 на катушку барабана 53, зацеп 57 контактирует с микропереключателем 58, он размыкает электрическую цепь, питающую электрический двигатель 56 катушки барабанов 53. Работа электрического двигателя 56 прекращается Прекращается перемещение ленты парусов 3. При этом резко сокращается сопротивление судна. Судно движется при помощи электрического двигателя 10, получающего энергию от солнечных батарей 9 и от электрического генератора (на чертеже не показано).
При возникновении шторма срабатывает датчик 27 и замыкает электрическую цепь, питающую электрический двигатель 56 первой катушки барабана 53. При этом электрический двигатель 56 вращает катушку барабана 53. Парусная лента 3 наматывается на катушку барабана 53. Как только будет намотана вся лента парусов 3 на катушку барабана 53, зацеп 57 контактирует с микропереключателем 58, он размыкает электрическую цепь, питающую электрический двигатель 56 катушки барабанов 53. Работа электрического двигателя 56 прекращается, прекращается перемещения ленты парусов 3. При этом сокращается сопротивление хода судна и уменьшается опасность порыва парусных лент 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРУСНО-МОТОРНОЕ СУДНО СТАШЕВСКОГО И.И. | 2004 |
|
RU2258636C1 |
| ПАРУСНО-МОТОРНОЕ СУДНО И.И.СТАШЕВСКОГО | 2005 |
|
RU2293041C2 |
| МОТОРНО-ПАРУСНОЕ СУДНО | 2006 |
|
RU2323125C1 |
| ПАРУСНО-МОТОРНОЕ СУДНО СТАШЕВСКОГО И.И. (ВАРИАНТЫ) | 2007 |
|
RU2356781C1 |
| ПАРУСНО-МОТОРНОЕ СУДНО (ВАРИАНТЫ) | 2005 |
|
RU2297946C1 |
| ПАРУСНОЕ СУДНО | 2006 |
|
RU2331547C1 |
| АГРЕГАТ СТАШЕВСКОГО И.И. ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА ОКЕАНА | 2005 |
|
RU2302528C1 |
| ПАРУСНО-МОТОРНОЕ СУДНО СТАШЕВСКОГО И.И. | 2006 |
|
RU2329916C1 |
| ПАРУСНОЕ СУДНО | 1997 |
|
RU2178756C2 |
| ПАРУСНЫЙ НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ КУЩЕНКО В.А. | 2009 |
|
RU2403171C1 |
Изобретения относятся к судостроению. В первом варианте моторно-парусное судно содержит мачты, паруса, двигатель, гребные винты, электрические лебедки, датчики направления и силы ветра. Все паруса снабжены солнечными батареями, которые соединены с электрическими двигателями гребных винтов, электрическими лебедками при помощи электрической цепи. К каждой мачте с двух сторон шарнирно закреплены рамы с натянутыми парусами. Рамы могут быть выполнены в форме прямоугольника, либо трапеции, либо сектора, либо треугольника. Рамы соединены между собой и лебедками, выполнены складными с возможностью поворота рам парусов в разные стороны с образованием надлежащего угла между плоскостями парусов. Ширина рам парусов больше, чем ширина палубы судна. Нижний конец рам парусов установлен в направляющие, выполнен в форме швеллерных колец. Направляющие расположены часть на поверхности палубы, а часть - над поверхностью воды. Направляющие снабжены опорными откосами, соединенными со стенами судна и опорными стойками, соединенными с поплавками. Поплавки выполнены в форме цилиндров с конусом. Во втором варианте регулятор управления парусным вооружением которого снабжен радиокомпасом, стрелка индикатора выполнена из постоянного магнита, на шкале расположены герконы, они соединены с электрическими двигателями гребных винтов и лебедок, выполнены с возможностью автоматической координации и коррекции движения судна по заданному курсу при помощи спутниковой навигации. В третьем варианте судно снабжено парными горизонтальными параллельными направляющими, расположенными на разных уровнях, в них закреплены подвижные парусные ленты при помощи роликов. Оси роликов соединены с парусами при помощи подпружиненных тяг, а между собой при помощи канатов, выполнены с возможностью автоматического управления парусным вооружением, заключающегося в перемещении парусов вдоль направляющих в горизонтальном направлении путем сматывании их на катушки барабанов. Направляющие могут быть выполнены разной формы. Направляющие соединены между собой при помощи мачт и опорных стоек. Опорные стойки могут быть расположены вертикально или под наклоном, они соединены с палубой судна при помощи растяжек, выполненных с возможностью придания надежности и устойчивости стойкам. Достигается расширение технологических возможностей судна. 3 н.п. ф-лы, 30 ил.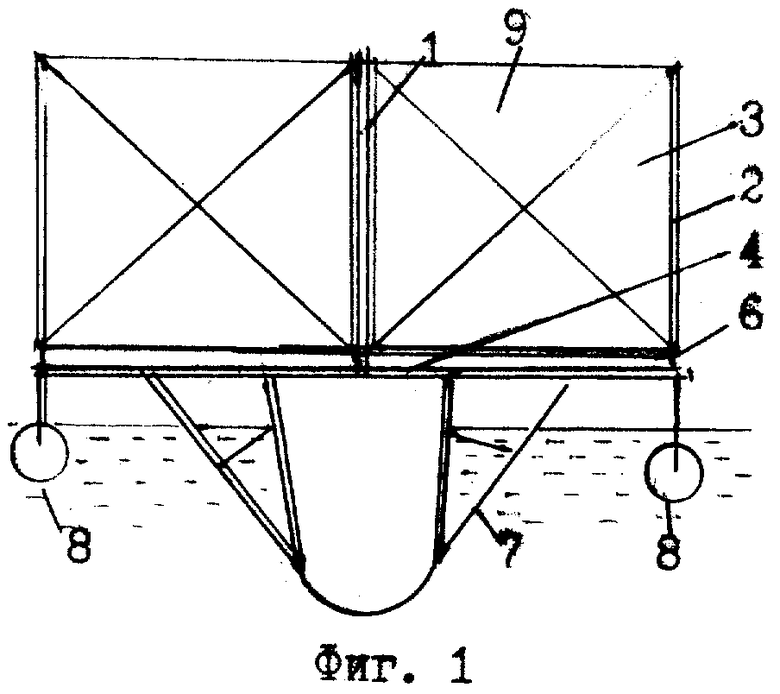
| Парусное вооружение | 1981 |
|
SU982968A1 |
| Судно | 1988 |
|
SU1625779A1 |
| DE 3502670 А1, 20.11.1986. | |||

