Область техники, к которой относится изобретение
В общем настоящее изобретение относится к способам и к устройству для обнаружения, удаления и/или ослабления сигналов из данных об акустических сигналах.
Предпосылки создания изобретения
Акустические каротажные устройства являются полезными при получении большого объема информации, относящейся к характеристикам пласта и скважины вблизи каротажного устройства. Результаты акустических скважинных измерений в основном используют для получения оценок медленности продольных и/или поперечных волн в пласте. Понять сигналы, регистрируемые в скважине, очень просто. Однако обычно вследствие влияния волн, отраженных от поверхностных границ, и шума регистрируемые данные искажаются, и требуется выполнение процесса интерпретации. Все же имеются различные способы для интерпретации с различной вероятностью успеха акустических данных, полученных в условиях скважины, не закрепленной обсадной трубой.
Однако в условиях обсаженной скважины интерпретировать регистрируемые сигналы намного труднее вследствие их сложности. Кроме того, при многочисленных сложных скважинных условиях требуются обсадные трубы. Последние достижения в области геофизики связаны с измерениями скоростей (или измерениями медленности) на всем пути к поверхности, между тем как во многих случаях каротаж мелких пластов может быть выполнен только после установки обсадной трубы. Поэтому желательно иметь способ для измерения медленности в обсаженной скважине.
Получение измерений медленности продольных и/или поперечных волн через обсадную трубу представляется сложной задачей, поскольку влияние обсадной трубы зависит от различных условий связи обсадной трубы с пластом и поэтому может маскировать медленность пласта. Обычно сигнал от обсадной трубы искажает регистрируемый сигнал и создает трудности при обработке данных, осуществляемых для получения полезных результатов измерений медленности. Добавлением к трудности является сложность прогнозирования формы и длительности сигнала от обсадной трубы, поскольку сигнал от обсадной трубы зависит как от медленности пласта, так и от связующих условий. Обсадная труба может быть причиной плохой когерентности в каротажной диаграмме с измерениями медленности, а иногда может приводить к потере всего сигнала от пласта.
Настоящее изобретение направлено на преодоление или по меньшей мере ослабление влияния одной или нескольких проблем, изложенных выше.
Сущность изобретения
Настоящее изобретение направлено на удовлетворение описанных выше и других потребностей. А именно, согласно настоящему изобретению предложен способ ослабления и/или удаления исследуемого сигнала, включающий в себя формирование акустических волн посредством каротажного устройства, имеющего по меньшей мере одно передающее устройство и по меньшей мере один приемник, автоматическую фильтрацию исследуемого сигнала из акустических данных, принимаемых по меньшей мере одним приемником, и обработку на основе меры когерентности автоматически отфильтрованных акустических данных. Автоматическая фильтрация может дополнительно включать в себя вычисление первой меры когерентности, включающей в себя исследуемый сигнал и проецирование данных об акустических сигналах во временную область. Мера когерентности может быть спроецирована на ось времени. Автоматическая фильтрация может дополнительно включать в себя определение окна, вмещающего исследуемый сигнал. Определение окна может включать в себя определение оптимальной полосы частот фильтрации для удаления других мод из исследуемого сигнала. Исследуемым сигналом может быть трубный сигнал от обсадной трубы в скважине.
Согласно другому аспекту изобретения предложен способ удаления одного или нескольких исследуемых сигналов из акустических данных, включающий в себя проецирование акустических данных на ось времени, обнаружение временного положения одного или нескольких исследуемых сигналов и фильтрацию одного или нескольких исследуемых сигналов из акустических данных. Фильтрация может дополнительно включать в себя обработку в окне одного или нескольких исследуемых сигналов и автоматическое определение путем использования статистического критерия, сколько компонент имеется в окне.
Согласно еще одному аспекту изобретения предложен способ удаления сигнала от обсадной трубы из звуковых данных, включающий в себя проецирование отображения время-медленность исходных данных на ось времени для значения медленности, соответствующего известному значению медленности обсадной трубы, обнаружение временного положения сигнала от обсадной трубы и фильтрацию временного положения сигнала обсадной трубы из звуковых данных. Фильтрация может включать обработку в окне сигналов от обсадной трубы и определение, сколько компонент имеется в окне. Кроме того, способ может включать в себя определение числа собственных значений, относящихся к сигналам от обсадной трубы, и перестройку сигналов от обсадной трубы. Затем перестроенные сигналы от обсадной трубы могут быть удалены из исходных данных, а обработка на основе меры когерентности может быть применена к исходным данным при удаленных сигналах от обсадной трубы для оценивания медленности продольных и поперечных волн в пласте за обсадной трубой.
Согласно еще одному аспекту изобретения предложен способ определения медленности пласта в обсаженной скважине, включающий в себя прием данных об акустических сигналах от передающего устройства, вычисление первой меры когерентности на основе данных о звуковых сигналах, спроецированных во временную область, и фильтрацию исследуемого сигнала из данных об акустических сигналах путем использования автоматического анализа и выбора собственных значений. В некоторых аспектах исследуемым сигналом является сигнал, соответствующий вступлению от обсадной трубы. Кроме того, способ может включать в себя вычисление второй меры когерентности относительно отфильтрованных данных для получения медленности продольной волны и поперечной волны в пласте через обсадную трубу. Вычисление первой меры когерентности дополнительно включает в себя определение на каждом уровне времени вступления трубного сигнала от обсадной трубы. Фильтрация может также включать в себя определение окна для извлечения исследуемого сигнала на основе результата вычисления первой меры когерентности, спроецированного во временную область, и применение окна к данным об акустических или звуковых сигналах. В случае определенного окна фильтрация может также включать в себя определение числа сигналов, имеющихся в окне, и определение числа собственных значений и собственных векторов, относящихся к трубному сигналу от обсадной трубы. Собственные векторы могут быть получены путем вычисления ковариационной матрицы. Кроме того, способ фильтрации может включать в себя перестройку исследуемого сигнала и вычитание его из данных о звуковых сигналах. В соответствии с этим фильтрация может дополнительно включать в себя определение полосы фильтра для автоматического удаления всех других возможных остающихся мод исследуемого сигнала из данных об акустических сигналах. Определение полосы фильтра может включать в себя сравнение возможных мод исследуемого сигнала со спектром сигнала от передающего устройства и, если не имеется интерференции между модами исследуемого сигнала и спектром сигнала от передающего устройства, то используется применение стандартного частотного фильтра; но, если имеется интерференция между модами исследуемого сигнала и спектром сигнала от передающего устройства, то используется определение и применение полосы фильтра для автоматического удаления всех других возможных остающихся мод исследуемого сигнала из данных об акустических сигналах. Определение полосы фильтра может также включать в себя создание и/или использование справочной таблицы различных возможных мод исследуемого сигнала, например справочной таблицы для обсадных труб различных диаметров.
Согласно еще одному аспекту изобретения предусмотрен способ определения медленности пласта в обсаженной скважине, включающий в себя формирование акустических волн посредством передающего устройства, прием акустических волн путем использования по меньшей мере одного приемника и формирование исходных акустических данных, вычисление меры когерентности вступления исследуемого сигнала в области медленность-время, проецирование меры когерентности на ось времени, определение размера окна для извлечения вступления исследуемого сигнала, применение окна к исходным данным для определения обработанного методом окна набора данных, определение числа источников в обработанных методом окна данных, определение числа собственных значений и собственных векторов, относящихся к вступлению исследуемого сигнала, перестройку вступления исследуемого сигнала, вычитание перестроенного вступления исследуемого сигнала из исходных данных для создания набора обработанных данных, определение полосы частотного фильтра и обработку на основе меры когерентности набора обработанных данных путем использования полосы частотного фильтра.
Согласно еще одному аспекту изобретения предусмотрено устройство для определения медленности пласта в обсаженном стволе скважины, содержащее по меньшей мере один акустический генератор, по меньшей мере один акустический приемник, процессор, соединенный с акустическим источником, акустическим приемником или с обоими и запрограммированный для автоматической фильтрации исследуемого сигнала, соответствующего вступлению, из акустических данных, принимаемых по меньшей мере одним акустическим приемником, и применения обработки на основе меры когерентности к автоматически отфильтрованным акустическим данным. Кроме того, процессор может быть также запрограммирован для вычисления меры когерентности исследуемого сигнала, соответствующего вступлению в области медленность-время, проецирования первой меры когерентности на ось времени, определения размера окна для извлечения исследуемого сигнала, соответствующего вступлению, применения окна к акустическим данным для определения набора данных, обработанных методом окна, определения числа источников в обработанных методом окна данных, определения числа собственных значений и собственных векторов, относящихся к рассматриваемой компоненте, перестройки исследуемого сигнала, соответствующего вступлению, вычитания перестроенного исследуемого сигнала, соответствующего вступлению, из акустических данных для создания набора обработанных данных, определения полосы частотного фильтра для звукового сигнала и применения обработки на основе меры когерентности к набору обработанных данных путем использования полосы частотного фильтра.
Дополнительные преимущества и новые признаки изобретения будут изложены в нижеследующем описании или сведения о них могут быть получены специалистами в области техники, к которой относится изобретение, при изучении этих материалов или практическом использовании изобретения. Преимущества от использования изобретения могут быть получены с помощью средств, перечисленных в приложенной формуле изобретения.
Краткое описание чертежей
Сопровождающие чертежи иллюстрируют предпочтительные варианты осуществления настоящего изобретения и являются частью описания. Вместе с нижеследующим описанием чертежи служат для демонстрации и пояснения принципов настоящего изобретения.
На чертежах:
фиг.1 - типичный вид акустического каротажного устройства в обсаженной скважине, соединенного с процессором компьютера, согласно одному варианту осуществления настоящего изобретения;
фиг.2 - принцип проецирования кривой время-медленность на ось времени согласно одному аспекту настоящего изобретения;
фиг.3 - схема последовательности операций, иллюстрирующая принципы автоматического выбора полосы фильтра согласно одному аспекту настоящего изобретения;
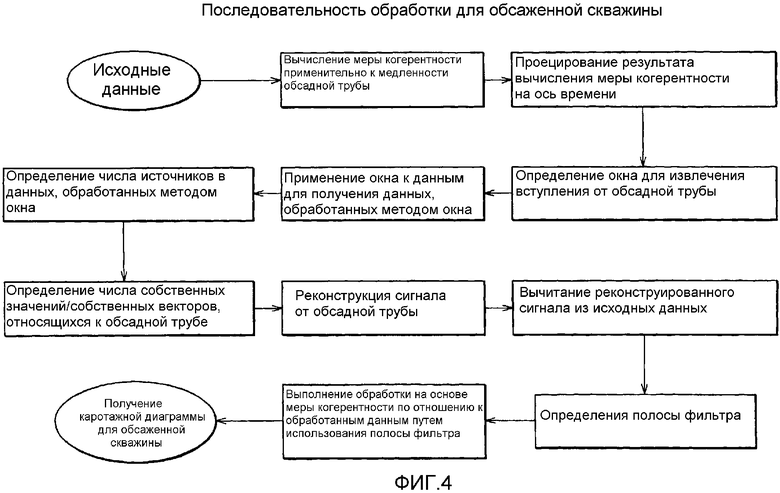
фиг.4 - схема последовательности операций, иллюстрирующая способ обработки звуковых данных согласно одному аспекту настоящего изобретения;
фиг.5 - пример звуковых данных, полученных в обсаженной скважине, обработанных в соответствии с принципами настоящего изобретения; и
фиг.6 - другой пример звуковых данных, полученных в обсаженной скважине, обработанных в соответствии с принципами настоящего изобретения.
Повсюду на чертежах идентичные элементы обозначены одинаковыми ссылочными позициями.
Подробное описание предпочтительных вариантов осуществления изобретения
Теперь обратимся к чертежам и, в частности, к фиг.1, на которой показано акустическое каротажное устройство (100), прилегающее к однородному пласту (102). Однородный пласт (102) обсажен обсадной трубой (104). Акустическое каротажное устройство включает в себя по меньшей мере одно передающее устройство (Т) и по меньшей мере один приемник (R). В представленном варианте осуществления изобретения имеются два приемника (R) и одно передающее устройство (Т), однако можно использовать намного больше приемников (R) и передающих устройств (Т). Показанная компоновка из одного передающего устройства (Т), двух приемников (R) по своей сути является примерной, и может быть полная группа приемников и/или передающих устройств или одно передающее устройство (Т) и приемник (R). Приемники (R) и передающее устройство (Т) соединены с процессором (106) компьютера, предназначенным для сбора и обработки данных от акустического каротажного устройства (100). Также показана траектория (108) волны, отражающая путь продольной волны, обусловленной возбуждением передающего устройства (Т). Приемники (R) могут быть различного типа, включая, но без ограничения ими, пьезоэлектрические и магнитострикционные приемники. Посредством приемников (R) можно обнаруживать вступления звуковых волн.
Информация или данные, собираемые от акустического каротажного устройства (100), которые могут включать в себя сигналы, формируемые приемниками (R) в динамике во времени, передаются к процессору (106) компьютера по кабелю (110), на котором подвешено акустическое каротажное устройство (100). Кроме того, данные между приемниками (R) и процессором (106) компьютера могут передаваться с помощью любого подходящего средства связи. Процессор (106) компьютера можно приобрести у широкого круга производителей. Акустические данные, полученные акустическим каротажным устройством (100) и принятые процессором (106) компьютера, могут быть обработаны путем осуществления способа автоматического удаления сигнала (описанного ниже). Процессор (106) компьютера может быть запрограммирован на автоматическое обнаружение, ослабление и/или удаление исследуемого сигнала согласно способам изобретения, описанным ниже. Например, процессор (106) компьютера может быть запрограммирован на автоматическое удаление сигнала от обсадной трубы из акустических или звуковых данных для определения медленности пласта (102) за обсадной трубой (104) согласно способам настоящего изобретения.
Один исследуемый сигнал представляет собой сигнал от обсадной трубы в обсаженной скважине. Как упоминалось при описании уровня техники, вступление от обсадной трубы (сигнал, связанный с обсадной трубой) часто искажает регистрируемые сигналы, создавая трудности при обработке данных предназначенной для получения медленности продольных и поперечных волн в пласте (102). Поэтому настоящее изобретение включает в себя методику обработки акустических или звуковых сигналов, прошедших сквозь обсадную трубу (104). Однако методика настоящего изобретения не ограничена обнаружением и удалением сигнала от обсадной трубы. Способы настоящего изобретения обеспечивают ослабление и/или удаление любого исследуемого сигнала из набора акустических данных. Поэтому, хотя приведенное ниже описание относится к сигналу от обсадной трубы, а методика описана применительно к сигналу от обсадной трубы, способ не ограничен таким образом и в равной степени может быть применен к другим рассматриваемым сигналам.
Согласно принципам настоящего изобретения методика обработки может быть применена для получения результатов измерений медленности, выполненных в обсаженной скважине, и она включает в себя удаление сигнала, соответствующего вступлению от обсадной трубы, из исходных акустических или звуковых данных, принятых приемниками (R). Согласно некоторым вариантам осуществления изобретения исходными данными могут быть монопольные данные о звуковых сигналах, однако способ обработки согласно настоящему изобретению может быть применен к акустическим данным любого вида и не ограничен монопольными данными. В то же время методика, рассматриваемая в настоящей заявке в соответствии с иллюстративным применением (вычислением медленности пласта на основании звуковых данных в обсаженной скважине), не ограничена частотным составом данных или видом данных (сейсмическими, ультразвуковыми данными и т.д.). Применение способов согласно настоящему изобретению обеспечивает путь для обнаружения любого рассматриваемого сигнала и удаления его из набора данных.
Предварительная обработка акустических данных согласно одному аспекту изобретения предназначена для обнаружения и/или удаления или извлечения исследуемого сигнала (такого как сигнал, соответствующий основному вступлению от обсадной трубы в обсаженной скважине) из акустических данных. Например, предварительная обработка в случае обсаженной скважины может включать в себя определение на каждом уровне пласта (102) времени первого вступления сигнала от обсадной трубы. Согласно другим осуществлениям настоящего изобретения может быть определено вступление любого исследуемого сигнала. Специалистам в области техники, к которой относится изобретение, имеющим выгоду от этого раскрытия, должно быть понятно, что прогнозирование момента, когда такой сигнал от обсадной трубы будет вступать, представляет собой относительно простую задачу, поскольку механические свойства обсадной трубы (или другой среды) обычно известны или могут быть легко определены. Трудность, связанная с удалением или с идентификацией исследуемого сигнала, заключается в определении момента окончания сигнала. Поэтому согласно принципам настоящего изобретения задается окно для обнаружения начала и конца исследуемого сигнала (который согласно одному аспекту изобретения представляет собой сигнал от обсадной трубы). Однако при применении окна могут потребоваться контроль и вмешательство человека, что нежелательно в случае акустического каротажа. Обычно акустический каротаж осуществляют в реальном времени. Поэтому согласно одному аспекту настоящего изобретения для облегчения автоматического обнаружения в акустических данных исследуемого сигнала осуществляют способ предварительной обработки. Автоматическое обнаружение исследуемых сигналов согласно настоящему изобретению с достижением преимущества обеспечивает возможность обработки сигналов без вмешательства человека. Один способ предварительной обработки согласно настоящему изобретению рассмотрен ниже.
Обработка на основе меры когерентности хорошо известна специалистам в области техники, к которой относится настоящее изобретение, имеющим выгоду от этого раскрытия. Обработка на основе меры когерентности облегчает определение медленности для различных компонент, распространяющихся поперек группы приемников звуковых сигналов. Результат обработки на основе меры когерентности обычно представляют в виде двумерного отображения время-медленность (время в зависимости от медленности). Результат обработки на основе меры когерентности обычно представляют как функцию глубины путем проецирования отображения время-медленность на ось медленности в соответствии со следующим уравнением:

где: Pi - проекция медленности; и
ρi - мера когерентности, вычисленная для каждого уровня, которая является функцией медленности S и времени t.
Способ задания функций результата, приведенного выше, изложен в соответствии со стандартной формой записи, используемой при прикладной обработке.
Однако, хотя результат обработки на основе меры когерентности обычно проецируют на ось медленности, согласно одному аспекту настоящего изобретения вместо этого отображение время-медленность проецируют на ось времени в соответствии с:

где: Ti - проекция на ось времени.
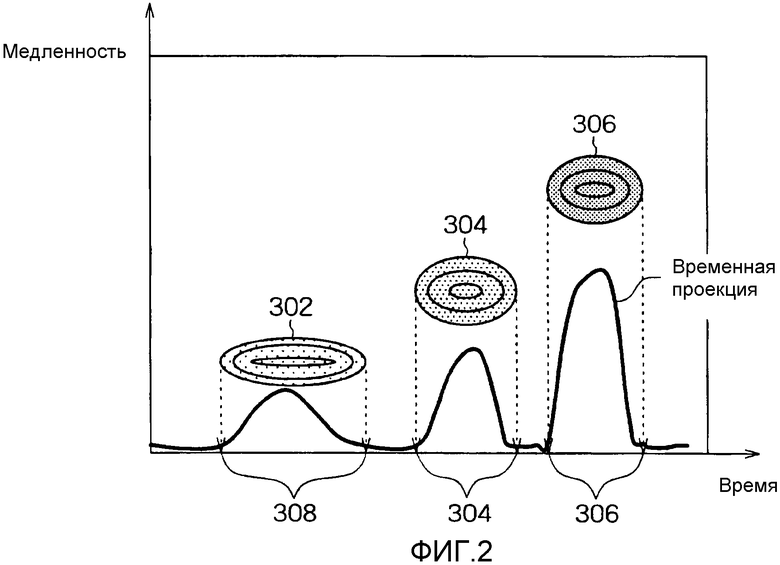
На фиг.2 показан принцип этого преимущественного способа проецирования на ось времени. Различные волны, распространяющиеся поперек группы приемников, представлены во временной области вместо обычной области медленности. Эта временная проекция отражает время вступления или начальное время для различных компонент, например для трех компонент (302/304/306) зарегистрированного сигнала, показанных на фиг.2. Однако должно быть понятно, что фиг.2 является иллюстративной по сути и не ограничена любым конкретным числом компонент или любым конкретным видом данных. Способ проецирования на ось времени, описанный в настоящей заявке, может быть использован для обнаружения любого числа различных компонент в данных любого вида. Временной конец (308/310/312) компонент (302/304/306) может быть найден путем обнаружения локального минимума между различными относительными максимумами, соответствующими различным компонентам. Поэтому временной конец (308/310/312) для одной из компонент (302/304/306) получают в следующем виде:

Поскольку нахождение минимума функции представляет собой хорошо известную задачу, то имеется много способов осуществления этого, известных специалистам в области техники, к которой относится изобретение, имеющим выгоду от этого раскрытия. Следовательно, путем проецирования отображения время-медленность на ось времени и нахождения временных концов (308/310/312) для каждой компоненты (302/304/306) на каждом уровне пласта можно определить окно во временной области, соответствующей рассматриваемым компонентам.
Согласно одному аспекту настоящего изобретения рассматриваемой компонентой является сигнал от обсадной трубы (104, фиг.1). Поэтому для обнаружения сигнала от обсадной трубы отображение меры когерентности проецируют на ось времени при значении медленности, соответствующем ожидаемому значению медленности для обсадной трубы (104, фиг.1). Ожидаемое значение медленности для обсадной трубы (104, фиг.1) известно или может быть легко определено специалистами в области техники, к которой относится изобретение, имеющими выгоду от этого раскрытия. В соответствии с этим пользователь может задать ожидаемое значение медленности для обсадной трубы. Должно быть понятно, что процесс обработки в окне, описанный в настоящей заявке, не ограничен обнаружением сигнала от обсадной трубы, но также может быть использован для применения окна к любому исследуемому сигналу (к сигналам продольных, поперечных или других волн). Однако согласно некоторым аспектам настоящего изобретения процесс обработки в окне применяется к сигналам от обсадной трубы.
После определения временного положения сигнала от обсадной трубы (или другой рассматриваемой компоненты) согласно одному аспекту настоящего изобретения он может быть отфильтрован из акустических данных. Однако возможно, чтобы в окне, определенном выше, имелись другие сигналы, введенные вместе с сигналом от обсадной трубы. Поэтому до фильтрации сигнала, соответствующего вступлению от обсадной трубы (или любого другого исследуемого сигнала), может оказаться желательным определить, сколько других компонент имеется в зоне окна.
Поэтому для определения числа других сигналов (указывающих на другие компоненты) в пределах окна можно найти одно или несколько собственных значений и собственных векторов. Согласно одному аспекту изобретения в случае данных, регистрируемых каротажным устройством (100, фиг.1) на уровне z, векторы результатов наблюдений обозначают как y. При таком обозначении предполагается, что векторы результатов наблюдений должны быть независимыми с нулевым, средним и гауссовыми случайными векторами, имеющими ковариационную матрицу, равную корреляционной матрице. Эти векторы результатов наблюдений могут включать в себя белый шум и независимую компоненту сигнала, имеющую ковариационную матрицу ранга Ns, где Ns - число сигналов, имеющихся на выходах приемников (R, фиг.1). Совместное распределение L комплекснозначных (работающих в частотной области) векторов y1, ..., yL результатов наблюдений имеет вид:

где K - оценка ковариационной матрицы; и
ξ - различные параметры модели (собственные значения, собственные векторы и дисперсия).
Число источников (компонент сигналов), имеющихся в данных, вычисляют, используя критерий минимальной длины описания (MDL), который задают следующим образом:

Значение NS, при котором минимизируются критерии, становится оценкой числа сигналов, имеющихся в поле пространственно белого шума. Вследствие шума максимальное число источников, которое можно оценить этим способом, составляет М-1, то есть число источников минус один. Когда имеются когерентные сигналы, это максимальное число может быть меньше.
Поскольку число источников известно, можно оценить дисперсию шума как:

Теоретически, если в окне имеется только один сигнал, то все собственные значения должны быть нулевыми, за исключением одного, относящегося к рассматриваемому сигналу. Однако практически этого не будет в обычном случае, и знание числа источников позволит получить сведение о числе компонент, имеющихся в звуковых данных.
После оценивания числа источников, имеющихся в окне, легко вычислить число собственных значений, относящихся к исследуемому сигналу. Когда исследуемый сигнал является сигналом от обсадной трубы, числом источников определяется максимальное число собственных значений, которые должны относиться исключительно к сигналу от обсадной трубы, поскольку обработка в окне была ограничена ожидаемым вступлением сигнала от обсадной трубы. Поэтому следующий этап согласно некоторым аспектам изобретения заключается в определении числа собственных значений, необходимых для перестройки сигнала, соответствующего вступлению от обсадной трубы (или другого исследуемого сигнала). Вследствие обработки в окне считается, что основной сигнал в области окна должен быть сигналом от обсадной трубы, в силу чего основные собственные значения λi будут относиться к основному сигналу от обсадной трубы. Критерием, показанным ниже, дается путь для определения, каким образом энергия собственных векторов φi изменяется в зависимости от основных собственных значений (то есть как связана с λi):

Когда вариация больше 10%, то предполагается, что собственный вектор связан с шумом и далее не должен использоваться для перестройки исследуемого сигнала. К тому же, поскольку признаки источника ранее были определены, то число операций, выполняемых в дальнейшем, очень небольшое, включая быстрый выбор числа собственных значений/собственных векторов, необходимых для реконструкции. В конце этого процесса становится известным число собственных значений/собственных векторов, относящихся к вступлению от обсадной трубы. Поэтому сигнал от обсадной трубы может быть перестроен и удален из исходных звуковых данных. После выбора числа собственных значений, относящихся к вступлению y от обсадной трубы, сигнал  от обсадной трубы может быть реконструирован следующим образом:
от обсадной трубы может быть реконструирован следующим образом:
где Ci определяется как:

при этом φi - собственные векторы, полученные из вычисления ковариационной матрицы.
После того как сигнал от обсадной трубы реконструирован, его можно вычесть из исходных данных. Должно быть понятно, что согласно рассмотренным выше способам любой сигнал из любого источника данных может быть обнаружен, реконструирован или удален из набора данных и что сигнал от обсадной трубы рассмотрен только для примера.
Согласно некоторым аспектам изобретения для оценивания медленности продольных и/или поперечных волн в пласте за обсадной трубой (104, фиг.1) может быть осуществлен способ дополнительной обработки на основе меры когерентности, сопровождающийся фильтрацией реконструированного сигнала от обсадной трубы (или другого сигнала) из исходных данных. Во время этого дополнительного процесса обработки на основе меры когерентности полоса фильтра, используемого при обработке, выбирается автоматически для удаления всех других предположительно оставшихся мод сигнала от обсадной трубы из звуковых данных. Полосу фильтра можно выбрать, используя информацию двух различных видов, рассмотренную ниже.
Согласно одному аспекту изобретения моды сигнала от обсадной трубы могут быть смоделированы как функция размера обсадной трубы, медленности флюида и медленности пласта. Моделированием обеспечивается получение оценки частоты мод сигнала от обсадной трубы для различных возможных конфигураций. Однако различные моды сигнала от обсадной трубы возбуждаются в зависимости от сигнала источника, излучаемого передающим устройством в пласт, то есть, если сигнал источника не возбуждает конкретной моды, то нет необходимости фильтровать ее. Поэтому выбор соответствующей полосы фильтра может включать в себя рассмотрение информации о сигнатуре источника. Принцип моделирования и рассмотрения сигнала источника и мод заключается в нахождении полосы фильтра, при которой минимизируется энергия мод рассматриваемой компоненты, которая должна быть обнаружена в акустических данных, при сохранении в то же самое время достаточной энергии для обеспечения возможности получения из данных желаемого сигнала (сигнала от пласта в обсаженной скважине).
Следовательно, для выбора соответствующей полосы фильтра может потребоваться анализ звуковых или акустических сигналов. Звуковой сигнал, регистрируемый на одном датчике, может быть выражен в виде:

где: R(t), S(t), F(t) и P(t) соответственно представляют собой регистрируемый сигнал, сигнал источника, функцию возбуждения пласта и обсадной трубы.
Для упрощения задачи можно предположить, что передаточная функция пласта представляет собой дельта-функцию. В соответствии с этим после преобразования в частотную область выражение становится следующим:

Как обсуждалось выше, согласно одному аспекту изобретения желательно минимизировать энергию мод сигнала от обсадной трубы (или мод другой компоненты), что может быть осуществлено путем фильтрации произведения E=S(ω)P(ω). Однако сигналы, относящиеся к самому пласту, или другие сигналы должны быть сохранены, и предпочтительно, чтобы они в минимальной степени ослаблялись полосой фильтра. Поэтому могут быть рассмотрены два случая. Первая и наиболее простая ситуация может быть тогда, когда моды сигнала от обсадной трубы не взаимодействуют с ожидаемой полосой частот пласта. В такой ситуации может быть использована стандартная полоса частот. Однако, если моды сигнала от обсадной трубы интерферируют с полосой частот пласта, задача становится более сложной, поскольку должен соблюдаться компромисс между фильтрацией сигнала от обсадной трубы в определенной полосе частот и сохранением сигналов от пласта. Один критерий, который может быть использован, основан на энергии мод сигнала от обсадной трубы при минимизации величины Eполосы, определяемой следующим образом:
где: ω1 и ω2 - полосы частот, выбранные для фильтрации; и
S - сигнал звукового источника, излучаемый в пласт передающим устройством (Т, фиг.1).
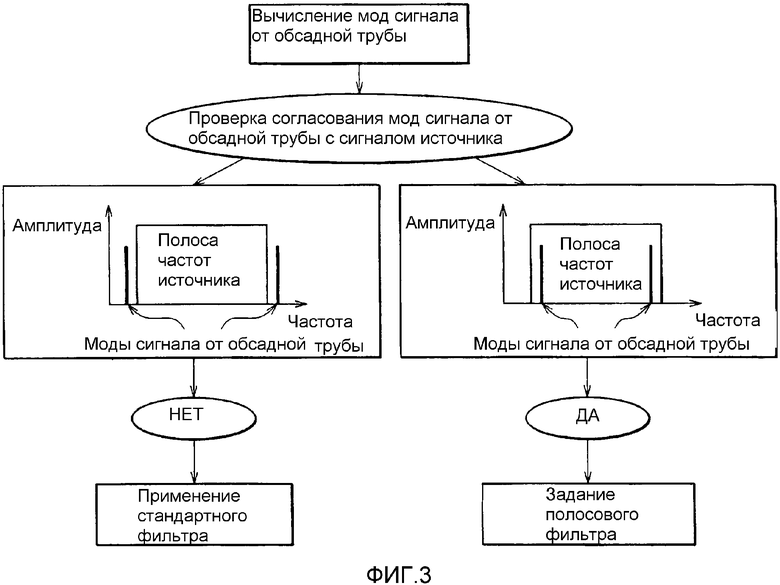
Если моды сигнала от обсадной трубы не интерферируют с ожидаемым сигналом от пласта, отношение равно 1, и применима стандартная полоса фильтра. Когда моды сигнала от обсадной трубы интерферируют с ожидаемыми сигналами от пласта, то для минимизации действия сигнала от обсадной трубы и сохранения энергии, достаточной для обработки пластовых данных, ω1 и ω2 могут быть выбраны так, чтобы Eполосы было больше, чем около 0,3, предпочтительно, чтобы оно было больше, чем около 0,5. В случае отношения Eполосы около 0,5 удовлетворяются требования двух задач фильтрации мод сигнала от обсадной трубы и сохранения сигнала от пласта. В соответствии с этим полоса частот фильтра определяется значениями ω1 и ω2. Значения ω1 и ω2 могут быть вычислены для различных конфигураций для образования справочной таблицы согласно некоторым аспектам настоящего изобретения. Справочная таблица может быть без труда образована специалистами в области техники, к которой относится изобретение, имеющими выгоду от этого раскрытия. В данной ситуации в случае обсадной трубы для исключения вычисления ω-критерия в процессе каротажа и минимизирования числа данных, вводимых пользователем, необходимых для каротажных работ, справочная таблица может включать в себя многие или все различные возможные сценарии обсадной трубы (различные комбинации свойств пласта, скорости бурового раствора, диаметра обсадной трубы и т.д.). В зависимости от области применения точно так же могут быть образованы другие справочные таблицы для других исследуемых сигналов. На фиг.3 показана схема последовательности операций способа автоматического выбора полосы фильтра, описанного выше. В дополнение к этому на фиг.4 показана схема последовательности этапов одного способа для определения медленности пласта через обсаженную скважину и/или удаления сигналов от обсадной трубы из звуковых данных. Однако должно быть понятно, что схемы последовательностей операций из фигур 3 и 4 по сути являются иллюстративными и что согласно некоторым аспектам изобретения можно использовать меньше этапов и/или дополнительные этапы, и что изобретение не ограничено примерами из фигур 3 и 4. Как указывалось ранее, способ не ограничен акустическими данными, как и не ограничен фильтрацией сигналов от обсадной трубы. Любые сигналы из любого набора данных могут быть подвергнуты фильтрации согласно способам настоящего изобретения. Подразумевается, что объем изобретения определяется приложенной формулой изобретения.
Примеры
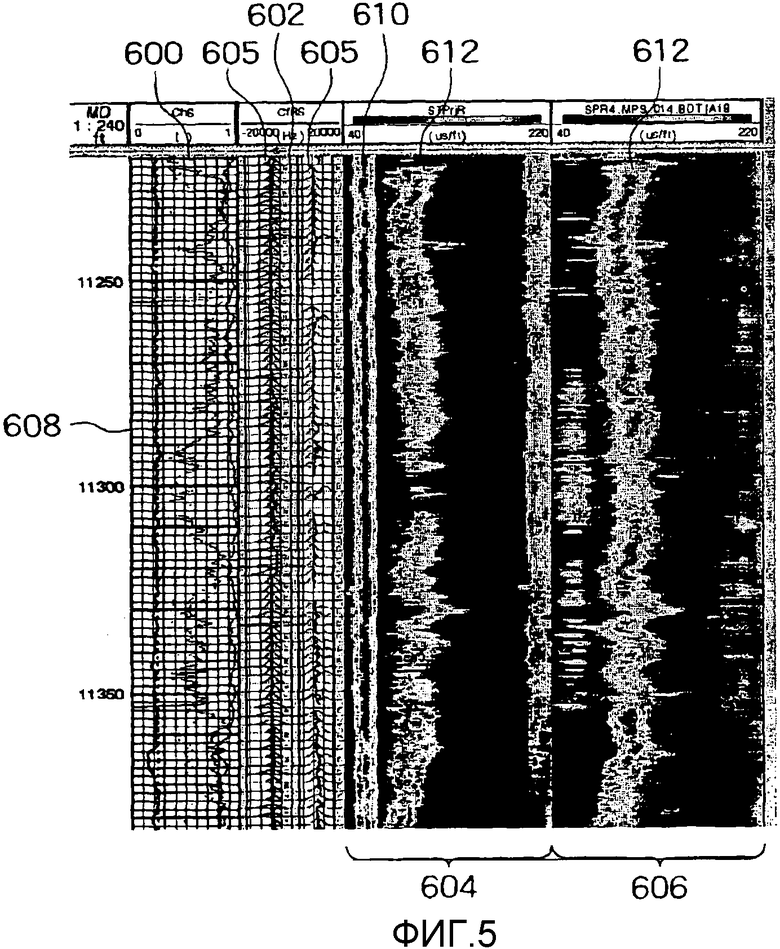
Способы, описанные выше, были осуществлены применительно к реальным акустическим данным, и некоторые результаты такого варианта осуществления представлены ниже. В качестве примера один из способов, описанных выше, был применен к реальным данным, зарегистрированным в обсаженной скважине посредством дипольного акустического сканера. Обратимся к фиг.5, где на первой дорожке (600) представлена кривая из когерентных точек. Кроме того, вторая дорожка (602) показана прилегающей к первой дорожке (600). Первая и вторая дорожки (600 и 602) в сочетании отображают спектр когерентных пиков (605) для сигналов, соответствующих вступлениям поперечной и продольной волн, соответственно, имеющихся на каротажной диаграмме (608). Третья дорожка (604) отображает проекцию медленности до удаления из данных сигнала от обсадной трубы, а четвертая дорожка (606) представляет собой результат проецирования медленности после удаления сигнала от обсадной трубы так, как пояснялось выше.
Как показано на фиг.5, на каротажной диаграмме (608) имеется сильное и когерентное вступление (610), когда сигнал продольной волны из пласта не является непрерывным и наблюдается с исключительно низкой когерентностью. Однако после обработки звуковых данных согласно способам настоящего изобретения сигналы (610), соответствующие вступлениям от обсадной трубы, были успешно удалены. Более того, когерентность сигналов (612), соответствующих вступлениям продольных волн, существенно повышается, что позволяет намного проще осуществлять интерпретацию каротажной диаграммы (608) по сравнению с предшествующими способами обработки.
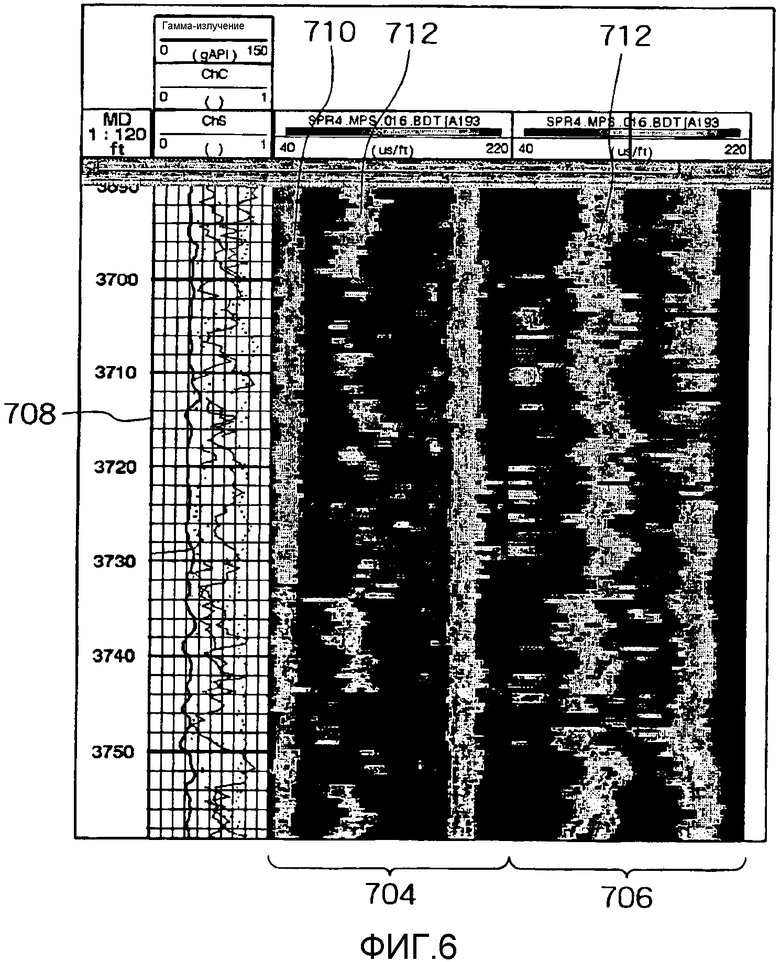
Далее обратимся к фиг.6, на которой показан другой пример применения способов, описанных выше, для определения медленности пласта за обсадной трубой. Как и на фиг.5, на каротажной диаграмме (708) отображены монопольные данные, полученные по P-волне и S-волне (по продольной и поперечной волнам), зарегистрированные через обсадную трубу. По изображениям второй дорожки (704) этого примера должно быть понятно, что сигнал (710), соответствующий вступлению от обсадной трубы, и вступление (712) продольной волны, имеющее низкую когерентность и разрывы на каротажной диаграмме (708), делают невозможным оценивание медленности (712) продольной волны через обсадную трубу. Однако после обработки звуковых данных согласно способам, описанным выше, сигнал (710), соответствующий вступлению от обсадной трубы, исчезает, тогда как в то же самое время когерентность и непрерывность медленности (712) продольной волны на третьей дорожке (706) существенно и небесполезно улучшаются. Аналогичные результаты могут быть достигнуты для данных других типов и других рассматриваемых компонент.
Приведенные выше описание и чертежи отражают методику и устройство для автоматической обработки акустических сигналов. Способ обработки может включать в себя автоматическое зонирование исследуемого компонентного сигнала (в примерах, приведенных выше, сигнала, соответствующего вступлению от обсадной трубы), вычисление меры когерентности, за исключением проецирования данных об акустических сигналах во временную область. Такое проецирование дает оценку вступления компонентного сигнала во временной области наряду с его временным концом. Кроме того, вступление компонентного сигнала может быть подвергнуто фильтрации путем использования автоматического анализа и выбора собственных значений. Собственные значения/собственные векторы, относящиеся к вступлению компонент, выбираются автоматически, что обеспечивает возможность реконструкции компонентного сигнала. После того как компонентный сигнал удален из данных, можно применить вторую обработку на основе меры когерентности, используя полосу фильтра, автоматически определенную путем использования моделирования и информации относительно сигнатуры источника. Конечным результатом этой обработки является более полное автоматическое оценивание данных (в примерах, приведенных выше, медленности продольных волн и поперечных волн (когда это возможно) из пласта за обсадной трубой).
Предшествующее описание было представлено только для иллюстрации и характеристики изобретения. Оно не подразумевается исчерпывающим или ограничивающим изобретение любой точной раскрытой формой. В свете рассмотренной выше идеи возможны многочисленные модификации и варианты.
Предпочтительный вариант осуществления изобретения был выбран и описан, чтобы наилучшим образом пояснить принципы изобретения и его практическое применение. Предполагается, что предшествующее описание обеспечит возможность специалистам в области техники, к которой относится изобретение, наилучшим образом использовать изобретение в различных вариантах осуществления и в различных модификациях, приспособленных для предполагаемого конкретного использования. Предполагается, что объем изобретения определяется нижеследующей формулой изобретения.
Предложенное изобретение относится к способам и к устройству для обнаружения, удаления и/или ослабления сигналов из данных об акустических сигналах. Технический результат от реализации данного изобретения заключается в повышении качества интерпретации (выделения полезной информации) регистрируемых сигналов. Способ выделения и/или удаления сигнала, представляющего интерес, включает в себя: возбуждение акустических волн посредством каротажного устройства, имеющего по меньшей мере одно передающее устройство и по меньшей мере один приемник; автоматическую фильтрацию сигнала, представляющего интерес, из данных об акустических сигналах, принимаемых по меньшей мере одним приемником, посредством вычисления первой меры когерентности, включающей в себя сигнал, представляющий интерес, и проецирование первой меры когерентности во временную область, и обработку на основе меры когерентности данных по автоматически отфильтрованным акустическим сигналам. Указанный способ реализован в нескольких вариантах при помощи соответствующих устройств. 6 н. и 47 з.п. ф-лы, 6 ил.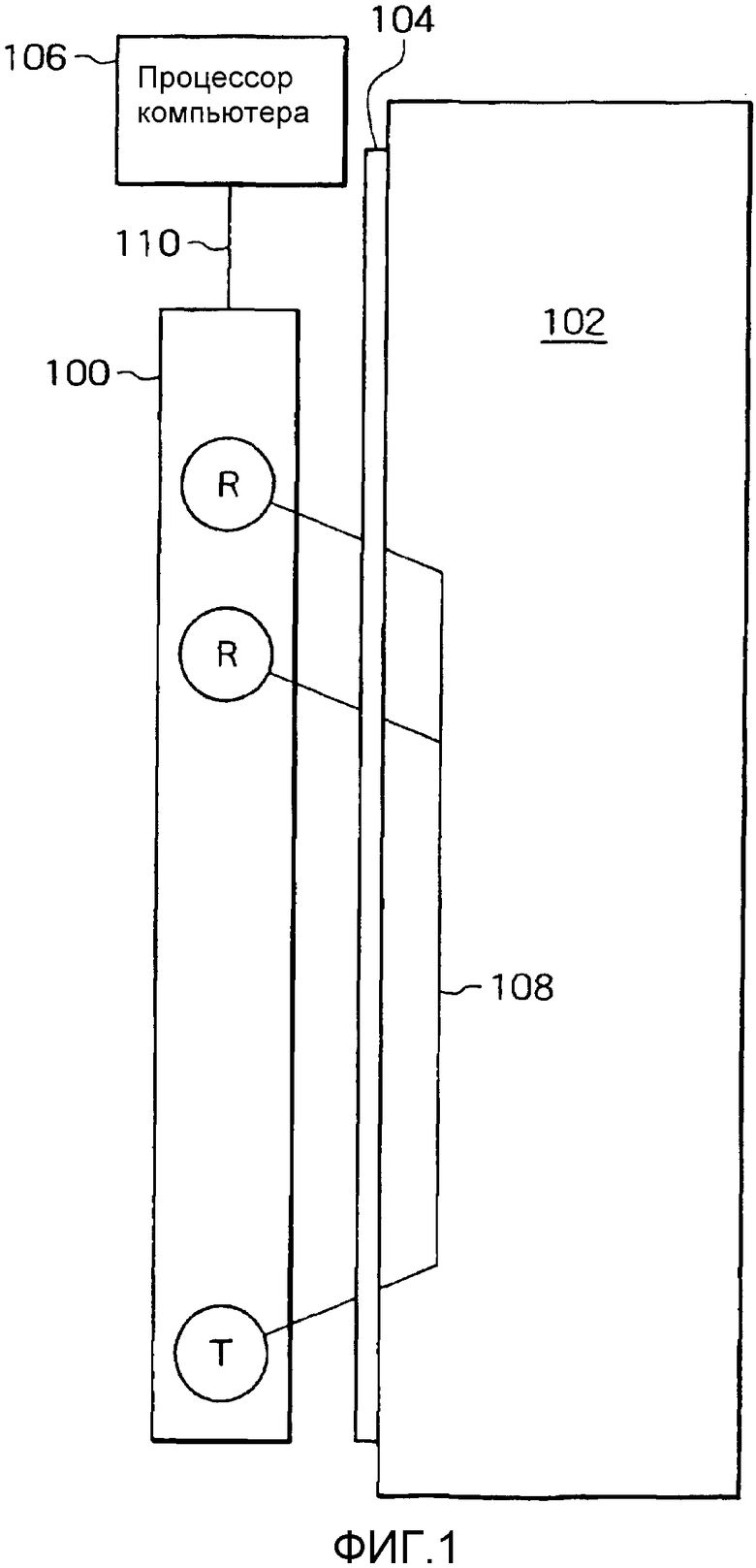
| WO 00/03269 А1, 20.01.2000 | |||
| US 4594691 А, 10.06.1986 | |||
| US 6449560 В1, 10.09.2002 | |||
| US 5740124 А, 14.04.1998. |

