Родственные заявки
По этой заявке испрашивается приоритет предварительной патентной заявки США, №60/939222, поданной 21 мая 2007 г., содержание которой полностью включено в настоящую заявку путем ссылки.
Область техники, к которой относится изобретение
В общем, настоящее изобретение относится к способам и системам для исследования подземных формаций с использованием акустических измерений, выполняемых в буровой скважине. Более конкретно, настоящее раскрытие касается способов и систем, которые обеспечивают эффективную, в реальном времени, обработку акустических данных для задач отображения или воспроизведения возможных акустических отражателей в подземных формациях.
Уровень техники
Акустическими измерениями с использованием имеющихся в настоящее время приборов и способов обеспечивается ключевая информация при скважинном каротаже на нефтепромысле. Имеющиеся в настоящее время акустические приборы являются пригодными для получения разнообразной информации, относящейся к параметрам окружающей формации и буровой скважины. Способы поверхностного сейсмического и вертикального сейсмического профилирования используют для получения изображения всей геологической структуры коллектора углеводородов. Вблизи буровой скважины акустические и другие способы скважинного каротажа обеспечивают изображение с хорошим разрешением. Построение акустического изображения представляет собой еще один способ, который охватывает промежуток в пространственном разрешении между этими сейсмическими способами и способами скважинного каротажа.
Некоторые приборы включают в себя единственный источник акустических волн и два или большее количество приемников, однако, в настоящее время большинство приборов включают в себя два или большее количество акустических источников и многочисленные приемники, скомпонованные в группу. Первоочередное использование акустических скважинных измерений заключается в оценивании медленности в формации продольной (Р) волны и/или поперечной (S) волны. Оценку медленности в формации продольной и/или поперечной волны часто выражают в виде плоскости зависимости медленности от времени, и с помощью современной технологии ее можно визуализировать на месте расположения скважины.
Правопреемником настоящего изобретения, Schlumberger, разработан спускаемый на кабеле прибор для построения акустического изображения (называемый скважинным прибором для исследования акустических отраженных волн, BARS), который позволяет воспроизводить изображения особенностей коллекторов, таких как отражатели и трещины.
Хотя построение акустического изображения большей частью бывает успешным, данные о волновых сигналах, регистрируемые для задач построения акустического изображения, в дополнение к требуемым вступлениям отраженных волн обычно содержат вступления многих видов, таких как создаваемый прибором шум и создаваемый буровой скважиной шум. Например, головные волны, прямая продольная и поперечная, и трубные волны, которые являются частью исходных данных, регистрируемых во время скважинных акустических измерений, обладают свойством затенять отраженные вступающие волны, относящиеся к акустическим отражателям в подземных формациях. Вследствие этого на месте расположения скважины часто неясно, включают ли в себя регистрируемые акустические измерения требуемые данные о вступлениях отраженных волн, относящиеся к подземных акустическим отражателям. Являются желательными способы, которыми эффективно идентифицируется или исключается этот шум при регистрации и обработке данных для построения акустического изображения. Кроме того, безусловно желательными являются способы, которые позволяют оперативно, в реальном времени, отображать возможные акустические отражатели в подземных формациях для принятия решения на месте расположения скважины.
Краткое изложение существа изобретения
Настоящее изобретение направлено на исключение или по меньшей мере снижение отрицательных действий одной или нескольких проблем, изложенных выше.
В соответствии с этим задача настоящего раскрытия заключается в создании усовершенствованных систем и способов для обработки данных акустических волновых сигналов, регистрируемых в буровой скважине, в которых отраженные вступающие волны легко идентифицируются и выделяются из создаваемых прибором и создаваемых буровой скважиной вступлений. В соответствии с вариантами осуществления настоящего изобретения дальнейшая задача заключается в создании усовершенствованных систем и способов, в которых используются действующие в реальном времени индикаторы или воспроизведение изображения возможных акустических отражателей в подземных формациях для корректировки параметров регистрации данных, например, на месте расположения скважины. В соответствии с вариантами осуществления дальнейшая задача заключается в создании индикаторов или воспроизведения изображения возможных акустических отражателей в подземных формациях для улучшенной обработки данных, например, в центре данных путем снижения общего времени, которое требуется для обработки данных об акустических волновых сигналах.
Сущность изобретения
Настоящее изобретение удовлетворяет описанным выше и другим потребностям. В частности, настоящим раскрытием предоставляются способы и системы для получения измерений, относящихся к подземным формациям, и в частности, для каротажа подземных формаций. Способами и системами обеспечивается обработка данных об акустических волновых сигналах, относящихся к подземной формации, содержащая получение акустических измерений на одной или нескольких глубинах буровой скважины, пересекающей подземную формацию; извлечение части акустических измерений на основании заданных параметров для выбора отраженных вступающих волн из акустических измерений; формирование временной проекции извлеченных акустических измерений в зависимости от глубины буровой скважины; и формирование отображения или воспроизведения изображения акустических отражателей в формации на основании спроецированных во времени акустических измерений.
В некоторых осуществлениях, раскрытых в настоящей заявке, заданные параметры для выбора отраженных вступающих волн представляют собой время вступления и медленность в формации. Заданные параметры для выбора отраженных вступающих волн могут быть выбраны из следующих: максимальное время вступления = время регистрации данных на глубине буровой скважины; минимальное время вступления = время вступления продольной и/или поперечной волны; максимальная медленность = оцененная или в реальном времени медленность продольной и/или поперечной волны для формации; и минимальная медленность = 0. В аспектах настоящей заявки отображение или воспроизведение акустических отражателей создают для многочисленных глубин акустических измерений. Получаемые измерения могут быть каротажными измерениями. Получаемые измерения могут быть измерениями в процессе бурения.
В аспектах настоящего раскрытия измерения представляют собой волновые сигналы и извлечение части акустических измерений содержит суммирование волновых сигналов в плоскости зависимости медленности от времени; формирование окна обработки вокруг части суммированных волновых сигналов на основании заданных параметров; и извлечение суммированных волновых сигналов в окне обработки. Однако в других аспектах настоящей заявки извлечение части акустических измерений содержит выбор части волновых сигналов на основании заданных параметров; суммирование выбранной части волновых сигналов в плоскости зависимости медленности от времени; и извлечение суммированных волновых сигналов.
В соответствии со способами, раскрытыми в настоящей заявке, отображение или воспроизведение акустических отражателей в формации может создаваться в реальном времени с акустическими измерениями.
В соответствии с одним способом, раскрытым в настоящей заявке, каротаж подземной формации содержит генерирование акустических волн источником; прием акустических волновых сигналов множеством приемников; извлечение части акустических волновых сигналов на основании заданных параметров для выбора отраженных вступающих волн из акустических волновых сигналов; формирование временной проекции извлеченных акустических волновых сигналов в зависимости от глубины буровой скважины; и обеспечение отображения или воспроизведения изображения акустических отражателей в формации на основании спроецированных во времени акустических волновых сигналов для многочисленных глубин регистрации данных, при этом заданные параметры для выбора отраженных вступающих волн представляют собой время вступления и медленность в формации. В аспектах настоящей заявки способ каротажа дополнительно содержит обеспечение на месте расположения скважины, в реальном времени с приемом акустических волновых сигналов, отображения или воспроизведения изображения акустических отражателей в формации; и использование отображения или воспроизведения изображения акустических отражателей для корректировки параметров подземного каротажа. В других аспектах настоящей заявки способ каротажа дополнительно содержит использование отображения или воспроизведения изображения акустических отражателей в формации для корректировки параметров обработки данных из акустических волновых сигналов.
В некоторых осуществлениях, раскрытых в настоящей заявке, один способ регистрации акустических измерений, относящихся к подземной формации, содержит генерирование акустических волн источником; прием акустических волновых сигналов множеством приемников; в реальном времени с приемом акустических волновых сигналов извлечение части акустических волновых сигналов на основании заданных параметров для выбора отраженных вступающих волн из акустических волновых сигналов, формирование временной проекции извлеченных акустических волновых сигналов в зависимости от глубины буровой скважины, и создание отображения или воспроизведения изображения акустических отражателей в формации на основании спроецированных во времени акустических волновых сигналов для многочисленных глубин регистрации данных; и корректировку параметров, относящихся к акустическим измерениям, на основании отображении или воспроизведения изображения акустических отражателей в формации.
Система для получения акустических измерений, относящихся к подземной формации, содержит акустический прибор, содержащий по меньшей мере один источник и множество приемников, установленных на нем; компьютер в связи с акустическим прибором; набор инструкций, выполняемых компьютером, который при выполнении извлекает часть акустических измерений на основании заданных параметров для выбора отраженных вступающих волн из акустических измерений; формирует временную проекцию выбранных акустических измерений в зависимости от глубины буровой скважины; и обеспечивает отображение или воспроизведение изображения акустических отражателей в формации на основании спроецированных во времени акустических измерений.
Дополнительные преимущества и новые признаки будут изложены в описании, которое следует ниже, или они могут быть усвоены специалистами в данной области техники при чтении этих материалов или практическом использовании изобретения. Преимущества могут быть достигнуты посредством перечисленного в прилагаемой формуле изобретения.
Краткое описание чертежей
Сопровождающими чертежами иллюстрируются предпочтительные варианты осуществления, и они являются частью описания, совместно с нижеследующим описанием чертежами иллюстрируются и поясняются принципы настоящего изобретения, на которых:
фиг.1А и 1В - блок-схемы последовательности действий, иллюстрирующие способы обработки акустических данных в соответствии с описанием в настоящей заявке;
фиг.2А - одна возможная конфигурация прибора для практического использования способов настоящего раскрытия;
фиг.2В - иллюстрация концептуальной зависимости между расстоянием отражателя от скважинного прибора и временами вступления волновых сигналов;
фиг.3А-3С - участки изображения, выбранные в плоскости зависимости медленности от времени, которые идентифицируются как имеющие вступления прямых волн и вступления отраженных волн, в случае синтетических акустических каротажных данных;
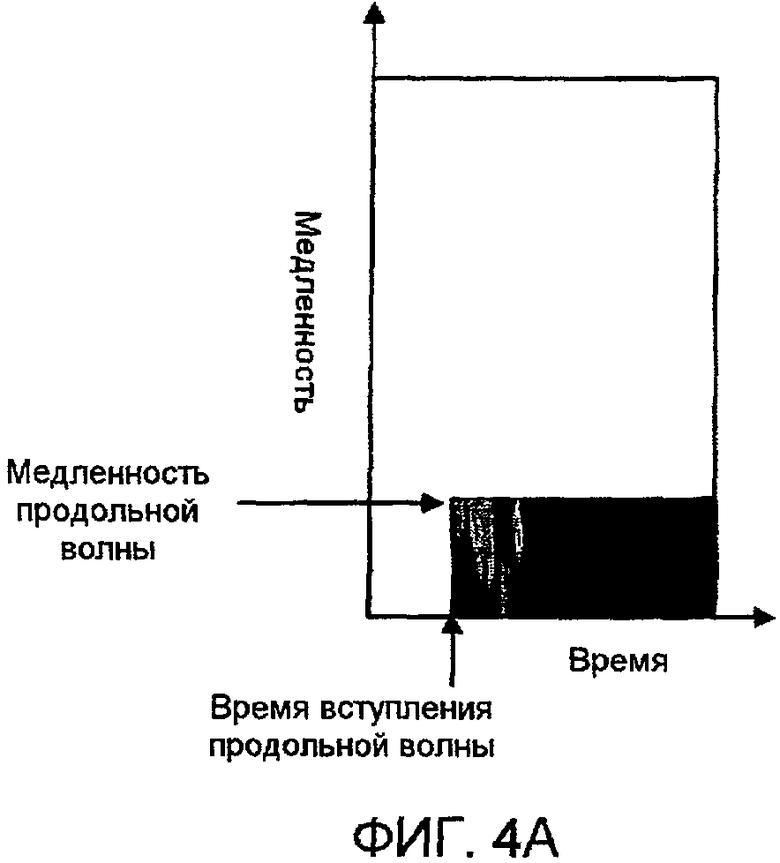
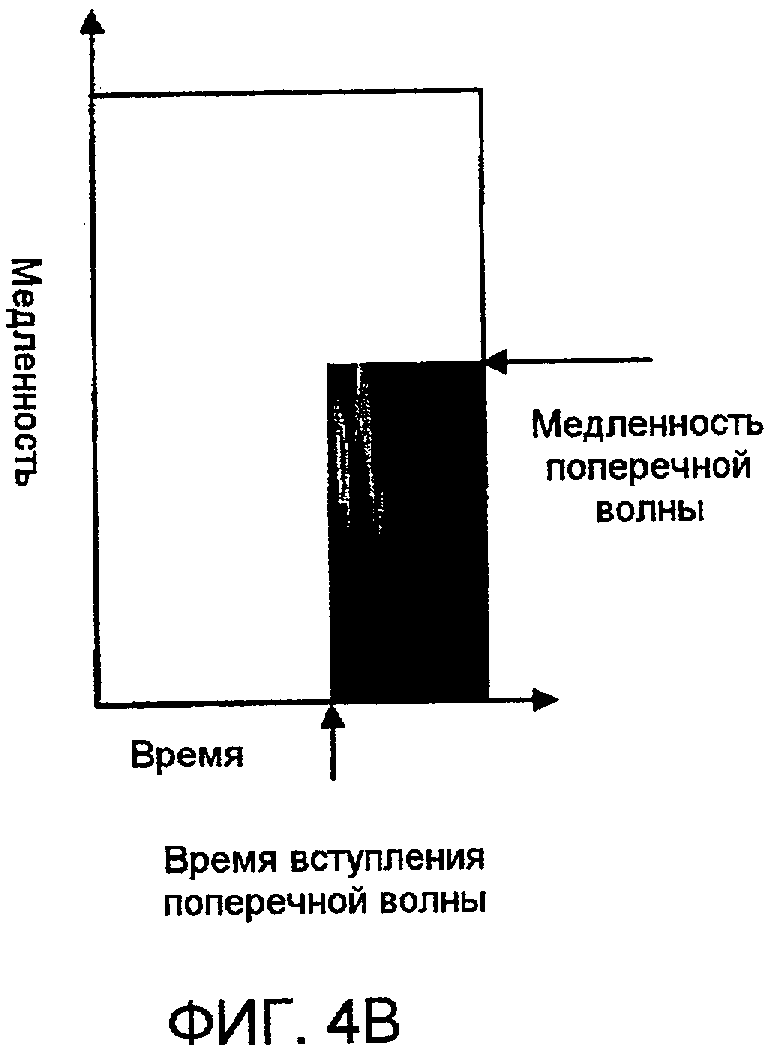
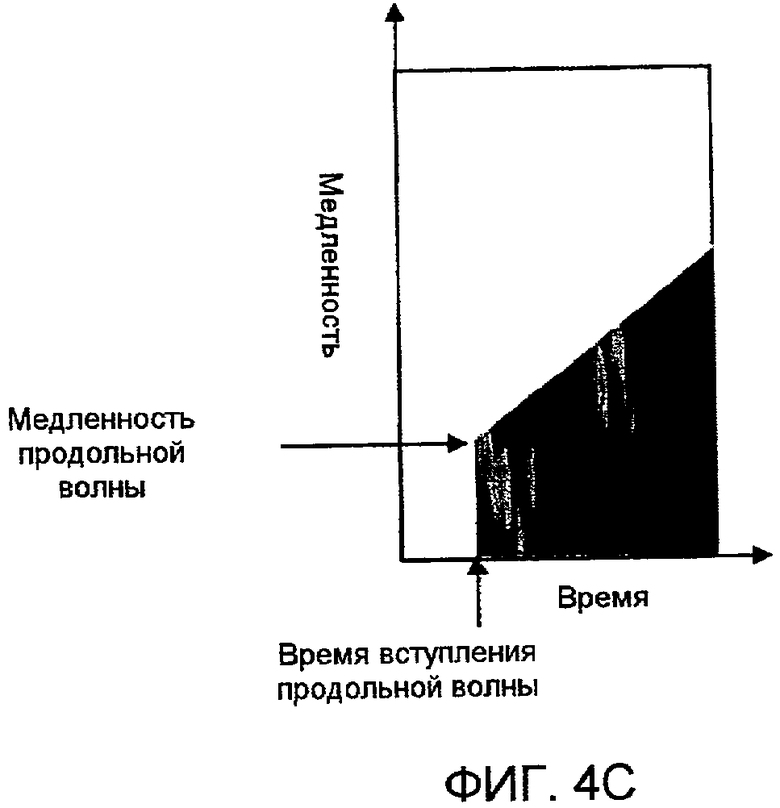
фиг.4А-4С - примеры участков в плоскости зависимости медленности от времени, имеющие отраженные вступающие волны, для обработки в соответствии со способами, описанными в настоящей заявке;
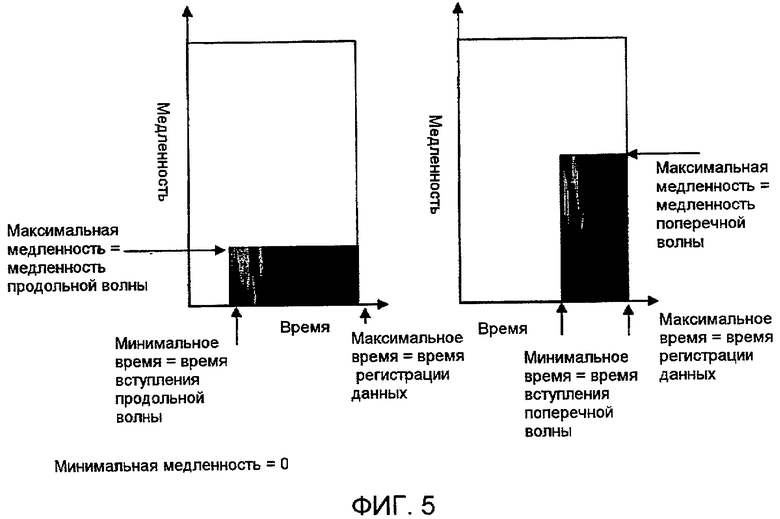
фиг.5 - иллюстрация одного способа, описанного в настоящей заявке, предназначенного для выбора участков, показанных на фиг.4А-4С; и
фиг.6А-6С - иллюстрация одного примера способа для временной проекции выбранных данных о волновых сигналах в зависимости от глубины буровой скважины в соответствии с раскрытием в настоящей заявке.
На всех чертежах идентичными позициями обозначены подобные, но необязательно идентичные элементы.
Подробное описание предпочтительных вариантов
воплощения изобретения
Ниже описываются примеры осуществлений и аспекты изобретения. Конечно, должно быть понятно, что для достижения конкретных целей разработчика при разработке любого такого фактического осуществления должны приниматься многочисленные специфические для реализации решения, такие как соответствие связанным с системой и связанным с деловой активностью ограничениям, которые изменяются от одной реализации к другой. Кроме того, должно быть понятно, что такая работа может быть сложной и требующей много времени, но тем не менее должна быть обычным мероприятием для специалистов в данной области техники, имеющих выгоду от этого раскрытия.
Слова «включающий» и «имеющий», используемые в описании, в том числе в формуле изобретения, имеют то же самое значение, что и слово «содержащий». Слово «акустический» охватывает частоты обычных акустических приборов, а также частоты, используемые в сейсмических приборах и применениях.
Предметом настоящего раскрытия считается отображение в реальном времени или воспроизведение изображения акустических отражателей в подземной формации. Как упоминалось выше, в прошлом акустические отражатели в подземной формации можно было точно идентифицировать только путем обработки большого количества данных, включающих в себя шум, которые регистрировали во время каротажной операции. До принципов, описанных в настоящей заявке, точное отображение в реальном времени подземных отражателей не могло быть осуществлено путем избирательной обработки только данных о волновых сигналах, имеющих вступления отраженных волн.
Настоящим раскрытием предоставляются способы и системы для каротажа подземной формации путем создания индикаторов или воспроизведения изображения акустических отражателей в формации. При этом для способов, предложенных в настоящей заявке, не требуются местоположения или ориентации подземных отражателей; точнее, способами обеспечивается возможность на месте расположения скважины оперативно оценивать качество или характер акустических измерений, которые регистрируют во время скважинного каротажа. В дополнение к этому или как вариант параметры, относящиеся к обработке данных из регистрируемых акустических измерений, можно корректировать или выбирать на основании отображения или воспроизведения изображения акустических отражателей в формации.
Способы и системы можно применять для акустического скважинного каротажа спускаемым на кабеле акустическим каротажным прибором. Однако способы и системы, представленные в настоящей заявке, не ограничены этим. Например, способы и системы можно использовать для других применений, таких как каротаж в процессе бурения, измерение в процессе бурения, каротаж в эксплуатационных скважинах. В настоящем раскрытии предполагается использование способов и систем настоящей заявки в сочетании с различными акустическими измерениями, например, с другими сейсмическими каротажными работами.
Способами, раскрытыми в настоящей заявке, предоставляются индикаторы акустических отражателей для улучшенного каротажа в нефтепромысловой скважине. Например, способы можно использовать для решения задач корректировки параметров регистрации данных на месте расположения скважины. При этом отображением возможных акустических отражателей инженеру на месте расположения скважины предоставляется возможность корректировать параметры регистрации акустических данных на основании возможных местоположений акустических отражателей в подземной формации.
Способами, раскрытыми в настоящей заявке, предоставляются индикаторы акустических отражателей, предназначенные для улучшенной обработки данных каротажа в нефтепромысловой скважине. Например, способы можно использовать в компьютерном центре для решения задач корректировки параметров обработки данных. При этом отображением возможных акустических отражателей предоставляется возможность специалисту по обработке данных сократить время обработки данных путем сосредоточения внимания на конкретном интервале данных, который должен быть обработан. Например, если каротажные данные были зарегистрированы на протяжении глубины, составляющей пару тысяч футов (около 600 м), а способами, раскрытыми в настоящей заявке, указывается, что в зарегистрированных данных только на протяжении глубины, составляющей пару сотен футов (около 60 м), возможно, имеются данные об отраженных волновых сигналах, то в компьютерном центре можно выполнять обработку данных только из области, предположительно имеющей данные об отраженных волновых сигналах, и исключать ненужную обработку данных, которые не имеют требуемых волновых сигналов.
Предложенные способы включают в себя обработку регистрируемых акустических волновых сигналов в плоской области зависимости медленности от времени с использованием заданных окон обработки, в которых идентифицируют отраженные вступающие волны, при этом создают временную проекцию на основании суммированных волновых сигналов из плоской области зависимости медленности от времени и наносят временную проекцию на ось глубины для каждой представляющей интерес глубины буровой скважины. Обработку можно повторять для каждой глубины регистрации данных, чтобы получать действующие в реальном времени индикаторы возможных местоположений акустических отражателей в окружающих подземных формациях.
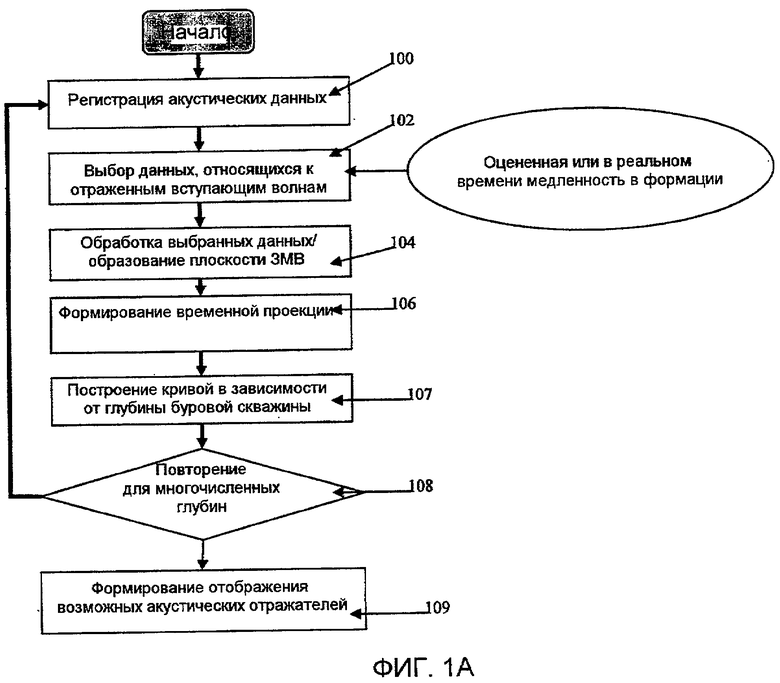
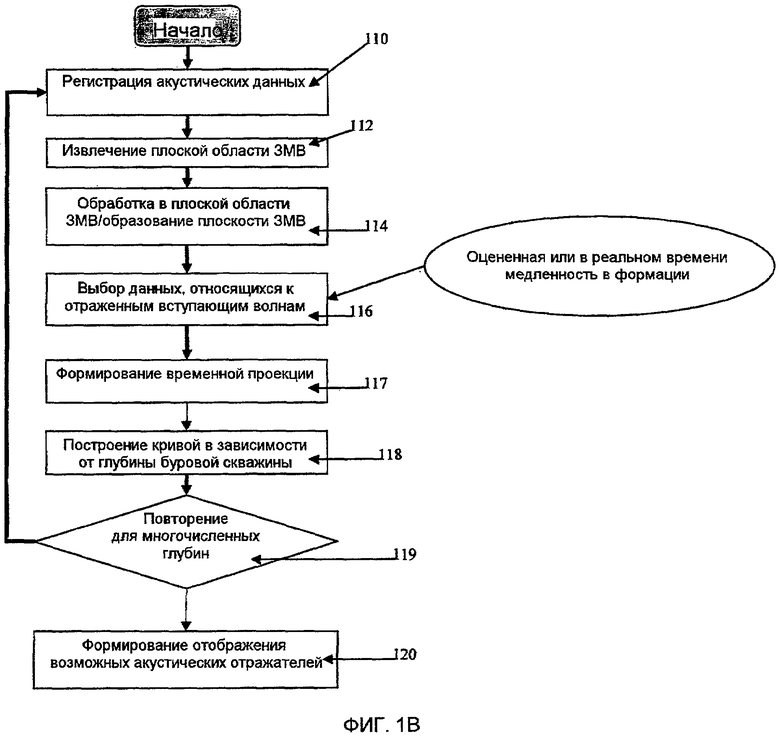
На фиг.1А и 1В представлены блок-схемы последовательности действий, иллюстрирующие некоторые способы обработки в соответствии с этим описанием. В осуществлении из фиг.1А регистрируемые акустические данные в плоской области зависимости медленности от времени (ЗМВ), относящиеся к вступлениям отраженных волн, выбирают до суммирования в плоскости зависимости медленности от времени. В осуществлении из фиг.1В обрабатывают все регистрируемые данные в плоской области зависимости медленности от времени и суммированные отраженные вступающие волны в плоскости зависимости медленности от времени идентифицируют и извлекают для дальнейшей обработки.
Что касается фиг.1А и 1В, то данные о волновых сигналах регистрируют 100/110 на каждой глубине. В процессе обработки из фиг.1А с использованием оцененной медленности в формации или медленности в формации в реальном времени выбирают 102 данные, относящиеся к отраженным вступающим волнам. При этом в окне обработки выбирают или извлекают данные об акустических волновых сигналах, которые являются релевантными для обработки отраженных вступающих волн, и исключают другие волновые сигналы, такие как прямые вступающие волны, которые являются менее релевантными для задач, описываемых в настоящей заявке. Способы формирования окон обработки более подробно описаны ниже.
Значения медленности в формации можно получать, используя отдельно регистрируемые данные, или можно оценивать, используя известные способы. Например, способы обработки когерентности медленность-время, которые известны в данной области техники, можно использовать для определения медленности в формации. Также можно использовать способы, компенсированные за влияние скважины. Оцененную медленность в формации можно получать, например, используя данные бурения, которые обычно включают в себя приближенные данные о медленности.
Выбранные в окне обработки данные о волновых сигналах (этап 102 из фиг.1А) суммируют 104 в плоскости зависимости медленности от времени (ЗМВ), используя способы обработки, которые известны специалистам в данной области техники. Обратите внимание на фиг.1А.
В процессе обработки из фиг.1В регистрируемые акустические данные в плоской области зависимости медленности от времени 112 суммируют 114 в плоскости зависимости медленности от частоты до выбора 116 данных, относящихся к вступлениям отраженных волн, используя оцененную медленность в формации или медленность в формации в реальном времени.
Что касается фиг.1А и 1В, то выбранные отраженные вступающие волны, которые суммируют в плоскости зависимости медленности от времени (этап 104/116), проецируют 106/117 на ось времени при сжатии оси медленности. Временную проекцию данных о зависимости медленности от времени можно получать, используя различные математические методы, которые известны специалисту в данной области техники. Результаты временной проекции (этап 106/117) откладывают 107/118 вдоль оси глубины скважины. При желании или необходимости описанные выше этапы можно повторять 108/119 для каждой глубины регистрации данных. Результаты описанной выше обработки данных можно использовать для создания 109/120 отображений возможных акустических отражателей в подземных формациях. Кроме того, обратите внимание на фиг.6С.
Как описано более подробно ниже, способами, показанными на блок-схемах последовательности действий из фиг.1А и 1В, обеспечиваются эффективные, действующие в реальном времени индикаторы возможных акустических отражателей в подземных формациях. При этом, как описано ниже, регистрируемые данные можно суммировать в плоскости зависимости медленности от времени до или после выбора данных, относящихся к отраженным вступающим волнам.
На фиг.6С показан один пример результата обработки синтетических данных о волновых сигналах, которые выбраны для вступлений отраженных волн с использованием способов временных проекций, описанных в настоящей заявке. При этом изображением, таким как на фиг.6С, инженеру на месте расположения скважины предоставляется возможность в реальном времени устанавливать или изменять параметры регистрации данных на основании представленных индикаторов или воспроизведения изображения возможных акустических отражателей в подземной формации. Такое воспроизведение в реальном времени изображения акустических отражателей является возможным в результате исключения прямых вступающих волн путем выбора участков из плоскости зависимости медленности от времени, рассмотренных более подробно ниже, которые имеют вступления отраженных волн.
Кроме того, этапами обработки, описанными выше, обеспечивается отображение данных о возможных отраженных волновых сигналах в регистрируемых акустических измерениях, которое можно использовать для сокращения времени дальнейшей обработки данных в компьютерном центре. Отображения данных о возможных отраженных волновых сигналах, описанные в настоящей заявке, можно использовать для сосредоточения внимания на конкретном интервале или интервалах данных, которые должны обрабатываться дополнительно с использованием способов более детальной обработки. Например, каротажные данные могут регистрироваться на протяжении глубины, составляющей пару тысяч футов (около 600 м). Регистрируемые данные могут иметь необходимые данные об отраженных волновых сигналах только на протяжении пары сотен футов (около 60 м). Обработка всех регистрируемых данных требует много времени и является дорогой. Поэтому, используя способы настоящего раскрытия, в центре обработки данных можно идентифицировать данные, имеющие данные о возможных отраженных волновых сигналах, и выполнять детальную обработку выбранных данных. Нет необходимости применять обработку данных ко всем данным, в результате чего экономятся время и затраты на обработку данных.
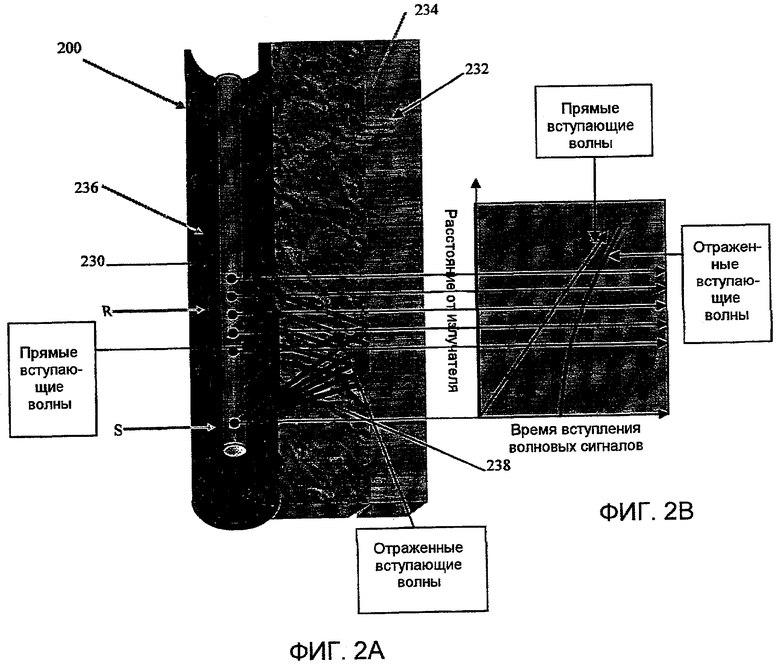
На фиг.2А показана одна возможная конфигурация прибора 230 для практического использования способов настоящего раскрытия.
Что касается фиг.2А, то на ней один пример конфигурации из излучателя S и группы приемников R, расположенных на расстоянии от излучателя S, представлен для иллюстрации одного возможного устройства для регистрации акустических данных в буровой скважине 200. Как показано на фиг.2А более темными линиями со стрелками, некоторые акустические волны 238 от излучателя S распространяются вдоль буровой скважины 200 и затем вступают непосредственно на группу приемников R. Кроме того, некоторые акустические волны 238 от излучателя S распространяются, как показано на фиг.2А более светлыми линиями со стрелками, к каждому приемнику R после возвращения от отражателя 234 в формации 232.
На фиг.2В показана теоретическая зависимость между расстоянием от отражателя до скважинного прибора и временами вступления волн. На графике из фиг.2В времена вступления двух различных акустических волн, то есть прямых вступающих волн и отраженных вступающих волн, представлены в зависимости от расстояния отражателя 234 от излучателя S прибора. Как очевидно из фиг.2В, времена вступления для прямых вступающих волн изменяются почти линейно в зависимости от расстояния между отражателем 234 и прибором 230. С другой стороны, времена вступления для отраженных вступающих волн изменяются по гиперболической кривой в зависимости от расстояния между отражателем 234 и прибором 230. При этом пути пробега для вступлений отраженных волн определяются нижеследующим уравнением (1).
Путь для отраженной волны =
 (1)
(1)
На фиг.2В также показано, что отраженные вступающие волны приходят на каждый приемник позднее, чем прямые вступающие волны. Иначе говоря, отраженные вступающие волны имеют «более быструю» кажущуюся медленность, чем прямые вступающие волны. Рассмотрение, относящееся к кажущейся медленности, можно найти в находящемся в общей собственности патенте США №6839633 (Basaki et al.) под названием “Methods and apparatus for imaging a subsurface fracture”.
В результате понимания изложенного выше заявитель установил, что прямые и отраженные вступающие волны должны появляться на различных и отдельных участках плоскости зависимости медленности от времени.
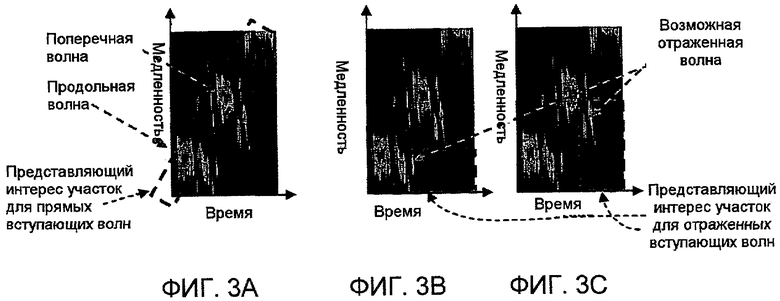
На фиг.3А-3С показаны описанные выше принципы с использованием синтетических данных об акустических волновых сигналах. В частности, на фиг.3А-3С показаны участки, выбранные в плоскости зависимости медленности от времени, которые идентифицированы как имеющие вступления прямых волн и вступления отраженных волн. На фиг.3А выбранный участок представляет интерес в случае вступлений прямых волн. В отличие от этого на фиг.3В и 3С показаны участки, которые представляют интерес в случае вступлений отраженных волн. Как очевидно из фиг.3А-3С, прямые вступающие волны и отраженные вступающие волны находятся на различных и отдельных участках плоскости зависимости медленности от времени.
Заявитель также осознал, что для обработки отраженных вступающих волн достаточно обрабатывать только акустические волновые сигналы в пределах выбранного участка в плоскости зависимости медленности от времени, относящегося к отраженным волнам. Заявитель предложил новые способы идентификации представляющих интерес участков для вступлений прямых волн и вступлений отраженных волн на плоскости зависимости медленности от времени с тем, чтобы можно было обрабатывать соответствующие данные, а данные, которые являются менее релевантными для обработки, могли не обрабатываться. В результате применения принципов, описанных в настоящей заявке, возможна эффективная и улучшенная обработка данных об акустических волновых сигналах, так что действующие в реальном времени индикаторы или воспроизведение изображения подземных акустических отражателей становятся доступными для применений на месте расположения скважины.
На фиг.4А-4С показаны примеры участков в плоскости зависимости медленности от времени, которые выбраны для отраженных вступающих волн, вследствие чего исключаются прямые вступающие волны (обратите внимание на фиг.3А-3С). Обработка отраженных вступающих волн путем суммирования в области зависимости медленности от времени достигается в соответствии со способами, описанными в настоящей заявке (обратите внимание на блок-схемы последовательности действий на фиг.1А и 1В).
На фиг.4А-4С показаны некоторые примеры участков, которые могут быть выбраны из области зависимости медленности от времени для обработки зависимости медленности от времени путем использования значений медленности в формации (для продольной и/или поперечной волны) и расстояния от излучателя до приемника для определения окон обработки, описанных более подробно ниже. Следовательно, обработка регистрируемых волновых сигналов в случае отраженных волн может быть значительно сокращена. Кроме того, можно исключать влияния прямых волн и без труда идентифицировать отображения возможных подземных отражателей.
На фиг.5 показан один возможный способ формирования участков или окон обработки, показанных на фиг.4А-4С. Как описывалось ранее в сочетании с приведенными выше фиг.1А и 1В, в соответствии с принципами, описанными в настоящей заявке, два способа можно использовать для обработки регистрируемых данных о волновых сигналах. Как показано на фиг.1А, можно обрабатывать данные о волновых сигналах только из выбранного участка области. С другой стороны, как показано на фиг.1В, можно обрабатывать все регистрируемые данные о волновых сигналах и можно извлекать данные, относящиеся к выбранному участку области. Обычно участок или окно обработки, описанное в настоящей заявке, относится к конкретной глубине буровой скважины.
Что касается фиг.5, то в одном возможном способе выбора окна обработки оцененное или значение в реальном времени медленности продольной и/или поперечной волны для формации может быть использовано в качестве максимального значения медленности для окна обработки. Минимальное значение медленности можно положить равным 0. Максимальное время для регистрации данных о волновом сигнале на рассматриваемой глубине буровой скважины может быть задано в качестве максимального значения времени для окна обработки. Минимальное значение времени для окна обработки может быть задано в качестве времени вступления продольной и/или поперечной волны, которое определяют умножением медленности продольной и/или поперечной волны для формации на расстояние между излучателем и приемником для рассматриваемого прибора.
Например, для прибора, имеющего расстояние между излучателем и приемником, составляющее 10 футов (3,048 м), формации с медленностью продольной волны, составляющей 60 мкс/фут (196,85 мкс/м), и максимального времени регистрации данных, составляющего 5000 мкс/фут (16404 мкс/м), участок обработки формируют при минимальном значении медленности, равном 0, максимальном значении медленности, равном 60, минимальном значении времени, равном 600, и максимальном значении времени, равном 5000.
Методологией, описанной выше, предоставляется один возможный способ выбора максимального и минимального значений для медленности и функций времени окон обработки. Однако можно использовать любой подходящий способ, которым обеспечиваются окна обработки с релевантными данными о волновых сигналах для задач отображения подземных акустических отражателей.
На фиг.6А-6С показан один пример способа для осуществления временной проекции выбранных данных о колебательных сигналах в зависимости от глубины буровой скважины.
На фиг.6А показаны синтетические данные о волновых сигналах, которые представлены на плоскости зависимости медленности от времени. Вся область зависимости медленности от времени или плоскость зависимости медленности от времени, показанная на фиг.6А, может быть использована для выбора участка обработки. На фиг.6В показан выбранный участок области, то есть окно обработки, которое было сформировано в соответствии со способами, описанными выше. Если все данные из плоскости зависимости медленности от времени на фиг.6А обрабатывать без выбора (как описано выше в сочетании с фиг.1В), то необходимо удалять участки из плоскости зависимости медленности от времени, которые имеют ненужные данные, то есть шум, для решения задач идентификации или воспроизведения возможных акустических отражателей в формации.
Обработка регистрируемых данных о волновых сигналах, всех регистрируемых данных или только выбранных данных в окнах обработки может быть выполнена путем суммирования волновых сигналов, принимаемых группами приемников. Обработанные результаты для волновых сигналов в пределах выбранного участка или участков (фиг.6В) проецируют на ось времени для каждой глубины регистрации данных при сжатии оси медленности (фиг.6С). На фиг.6С показан пример отображения или воспроизведения возможных акустических отражателей в подземной формации в соответствии со способами обработки из настоящего раскрытия.
Заявитель неожиданно обнаружил, что можно получать отображения или воспроизведение акустических отражателей в окружающих подземных формациях путем проецирования обработанных волновых сигналов на выбранном участке (участках) или в области (областях) во временную область, используя способы, которые являются известными из уровня техники, и представляя графически спроецированные во времени данные в зависимости от глубины буровой скважины. При желании или необходимости обработку можно повторять для каждой глубины регистрации данных.
Способы временной проекции, описанные в настоящей заявке, обеспечивают отображение возможных акустических отражателей в окружающих формациях. В некоторых осуществлениях отраженные вступающие волны могут обрабатываться в реальном времени по мере регистрации данных о волновых сигналах. При этом действующие в реальном времени индикаторы акустических отражателей позволяют оператору на месте расположения скважины оперативно корректировать параметры регистрации, благодаря чему повышаются качество и надежность регистрируемых данных. Некоторые примеры параметров регистрации, которые могут корректироваться на основании принципов, рассмотренных в настоящей заявке, включают в себя продолжительность регистрации данных, задержку при регистрации данных, мощность излучателя, частоту излучателя, наряду с другими, которые известны специалистам в данной области техники. Индикаторы возможных акустических отражателей также можно использовать для тонкой последующей обработки зарегистрированных акустических измерений при сосредоточении внимания на более детальной обработке данных на конкретных участках данных, имеющих требуемые данные об отраженных волновых сигналах.
Принципы, описанные в настоящей заявке, можно применять в системах регистрации данных различных видов, например измерений на каротажном кабеле, измерений в процессе бурения, измерений в эксплуатационных скважинах и т.д.
Способы, описанные выше, можно использовать совместно с каротажными приборами и системами любого типа. Например, что еще раз касается фиг.2А, примерный акустический прибор 230 показан вблизи формации 232 с акустическим отражателем 234. Акустический прибор 230 включает в себя источник S и по меньшей мере один датчик или приемник R. В примере осуществления, показанном на фиг.2А, имеются несколько приемников. Показанное устройство из источника и приемника является примерным по характеру и может быть любым устройством из приемников и/или источников.
В качестве одной возможности для решения задач, описанных в настоящей заявке, можно использовать спускаемый на кабеле прибор для построения акустического изображения от Schlumberger, называемый скважинным прибором для исследования акустических отраженных волн, BARS.
Приемники R и источник S соединены с процессором компьютера (в целом обозначенном позицией 236 на фиг.2А) для сбора и обработки данных от акустического прибора 230. Кроме того, показана траектория 238 волны, представляющая путь волны, обусловленной приведением в действие источника S. Приемники R могут быть различных видов, в том числе, но без ограничения ими, пьезоэлектрическими и магнитострикционными приемниками. Приемники R могут обнаруживать вступление акустических волн; при этом прямые вступающие волны и отраженные вступающие волны показаны на фиг.2А.
Измерения, собираемые от акустического прибора 230, которые могут включать в себя волновые сигналы, формируемые приемниками R в динамике во времени, можно передавать на поверхность по кабелю (непоказанному), на котором подвешивают акустический прибор, или с помощью любого обычного способа связи (например, телеметрии по гидроимпульсному каналу связи или по снабженной проводкой бурильной трубе). Процессор 236 компьютера можно приобрести у широкого круга поставщиков. Акустические данные, получаемые акустическим прибором 230 и принимаемые процессором 236 компьютера (на месте или на поверхности), могут обрабатываться в соответствии с доступными для процессора 236 компьютера инструкциями по выполнению обработки, описанной выше. Воспроизведение изображений акустических отражателей может быть осуществлено на месте расположения скважины, хотя в других осуществлениях, описанных в настоящей заявке, вычисления могут быть сделаны вне места обработки с использованием акустических данных, собранных акустическим прибором.
Как упоминалось выше, в соответствии с некоторыми аспектами настоящего раскрытия способами и системами, описанными в настоящей заявке, относительно простым процессом, для которого требуются очень небольшие вычислительные ресурсы, обеспечиваются робастные, точные, пригодные для использования индикаторы или воспроизведение изображения акустических отражателей. Способами и системами, описанными в настоящей заявке, обеспечиваются большие преимущества перед предшествующими способами, в которых требуется серьезная обработка для получения вступлений отраженных волн. Способы, описанные выше, позволяют оператору наблюдать в реальном времени отображения возможных отражателей в окружающих подземных формациях и соответствующим образом действовать во время каротажной операции. Способы, описанные выше, позволяют наблюдать в компьютерном центре обработки данных отображения возможных отраженных волновых сигналов в регистрируемых акустических волновых сигналах и соответствующим образом корректировать или выбирать параметры обработки данных во время обработки акустических измерений.
Осуществления были выбраны и описаны для наилучшего пояснения принципов изобретения и его практических применений. Предшествующее описание предназначено для обеспечения возможности другим специалистам в данной области техники наилучшим образом использовать изобретение в различных осуществлениях и с различными модификациями, подходящими для конкретных предполагаемых использований. Предполагается, что объем изобретения определяется нижеследующей формулой изобретения.
Изобретение относится к области геофизики и может быть использовано при исследовании подземных формаций. Заявлены способы и системы для получения акустических измерений, относящихся к подземным формациям. Способы и системы обеспечивают извлечение части акустических измерений на основании заданных параметров для выбора отраженных вступающих волн из акустических измерений. Еще одним этапом данного решения является образование временной проекции извлеченных акустических измерений в зависимости от глубины буровой скважины и формирование отображения или воспроизведения изображения акустических отражателей в формации на основании спроецированных по времени акустических измерениях. Технический результат: повышение точности получаемых геофизических данных. 4 н. и 20 з.п. ф-лы, 6 ил.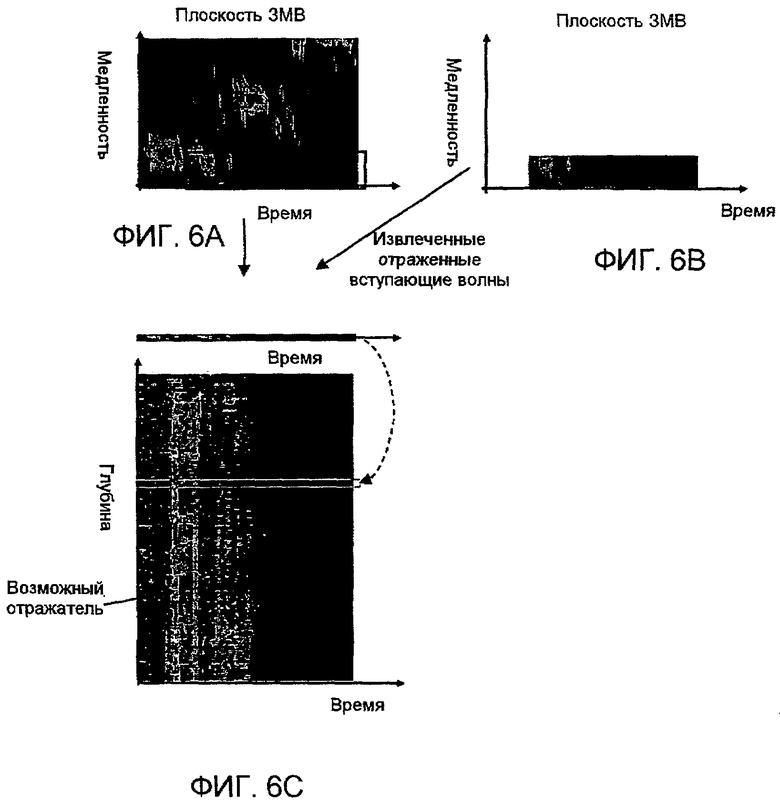
1. Способ обработки данных акустических волновых сигналов, относящихся к подземной формации, заключающийся в том, что:
получают акустические измерения на одной или нескольких глубинах буровой скважины, пересекающей подземную формацию;
извлекают часть акустических измерений на основании заданных параметров для выбора отраженных вступающих волн из акустических измерений;
формируют временную проекцию извлеченных акустических измерений в зависимости от глубины буровой скважины; и
формируют отображение или воспроизведение изображения акустических отражателей в формации на основании спроецированных во времени акустических измерений.
2. Способ обработки данных по п.1, в котором заданные параметры для выбора отраженных вступающих волн представляют собой время вступления и медленность в формации.
3. Способ обработки данных по п.1, в котором заданными параметрами для выбора отраженных вступающих волн являются:
максимальное время вступления = время регистрации данных на глубине буровой скважины;
минимальное время вступления = время вступления продольной и/или поперечной волны;
максимальная медленность = оцененная или в реальном времени медленность продольной и/или поперечной волны для формации; и
минимальная медленность = 0,
при этом
время вступления продольной и/или поперечной волны = медленность продольной/поперечной волны, умноженная на расстояние между излучателем и приемником.
4. Способ обработки данных по п.1, в котором:
отображение или воспроизведение изображения акустических отражателей формируют для многочисленных глубин акустического измерения.
5. Способ обработки данных по п.1, в котором получаемые измерения представляют собой каротажные измерения.
6. Способ обработки данных по п.1, в котором получаемые измерения представляют собой измерения в процессе бурения.
7. Способ обработки данных по п.1, в котором измерения представляют собой волновые сигналы, и извлечение части акустических измерений содержит:
суммирование волновых сигналов в плоскости зависимости медленности от времени;
формирование окна обработки вокруг части суммированных волновых сигналов на основании заданных параметров; и
извлечение суммированных волновых сигналов в окне обработки.
8. Способ обработки данных по п.1, в котором измерения представляют собой волновые сигналы, и извлечение части акустических измерений содержит:
выбор части волновых сигналов на основании заданных параметров;
суммирование выбранной части волновых сигналов в плоскости зависимости медленности от времени; и
извлечение суммированных волновых сигналов.
9. Способ обработки данных по п.1, в котором отображение или воспроизведение акустических отражателей в формации формируют в реальном времени с акустическими измерениями.
10. Способ каротажа подземной формации, заключающийся в том, что:
генерируют акустические волны источником;
принимают акустические волновые колебания множеством приемников;
извлекают часть акустических волновых сигналов на основании заданных параметров для выбора отраженных вступающих волн из акустических волновых сигналов;
формируют временную проекцию извлеченных акустических волновых сигналов в зависимости от глубины буровой скважины; и
обеспечивают отображение или воспроизведение акустических отражателей в формации на основании спроецированных во времени акустических волновых сигналов для многочисленных глубин регистрации данных,
в котором заданные параметры для выбора отраженных вступающих волн представляют собой время вступления и медленность в формации.
11. Способ каротажа подземной формации по п.10, в котором дополнительно:
обеспечивают на месте расположения скважины в реальном времени с приемом акустических волновых сигналов отображение или воспроизведение изображения акустических отражателей в формации; и
используют отображение или воспроизведение изображения акустических отражателей для корректировки параметров подземного каротажа.
12. Способ каротажа подземной формации по п.10, в котором дополнительно:
используют отображение или воспроизведение изображения акустических отражателей в формации для корректировки параметров обработки данных акустических волновых сигналов.
13. Способ регистрации акустических измерений, относящихся к подземной формации, заключающийся в том, что:
генерируют акустические волны источником;
принимают акустические волновые сигналы множеством приемников;
в реальном времени с приемом акустических волновых сигналов:
извлекают часть акустических волновых сигналов на основании заданных параметров для выбора отраженных вступающих волн из акустических волновых сигналов;
формируют временную проекцию извлеченных акустических волновых сигналов в зависимости от глубины буровой скважины; и
формируют отображение или воспроизведение изображения акустических отражателей в формации на основании спроецированных во времени акустических волновых сигналов для многочисленных глубин регистрации данных; и
корректируют параметры, относящиеся к акустическим измерениям, на основании отображения или воспроизведения акустических отражателей в формации.
14. Способ регистрации акустических измерений по п.13, в котором корректировка параметров, относящихся к акустическим измерениям, содержит:
обеспечение на месте расположения скважины в реальном времени с приемом акустических волновых сигналов отображения или воспроизведения акустических отражателей в формации; и
использование отображения или воспроизведения изображения акустических отражателей для корректировки параметров регистрации данных.
15. Способ регистрации акустических измерений по п.13, в котором корректировка параметров, относящихся к акустическим измерениям, содержит:
использование отображения или воспроизведения изображения акустических отражателей в формации для корректировки параметров обработки данных из акустических измерений.
16. Система для получения акустических измерений, относящихся к подземной формации, содержащая:
акустический прибор, содержащий по меньшей мере один источник и множество приемников, установленных на нем;
компьютер в связи с акустическим прибором;
набор инструкций, выполняемых компьютером, который при выполнении:
извлекает часть акустических измерений на основании заданных параметров для выбора отраженных вступающих волн из акустических измерений;
формирует временную проекцию извлеченных акустических измерений в зависимости от глубины буровой скважины; и
обеспечивает отображение или воспроизведение изображения акустических отражателей в формации на основании спроецированных во времени акустических измерений.
17. Система для получения акустических измерений по п.16, в которой заданные параметры для выбора отраженных вступающих волн представляют собой время вступления и медленность в формации.
18. Система для получения акустических измерений по п.16, в которой заданными параметрами для выбора отраженных вступающих волн являются:
максимальное время вступления = время регистрации данных на глубине буровой скважины;
минимальное время вступления = время вступления продольной и/или поперечной волны;
максимальная медленность = оцененная или в реальном времени медленность продольной и/или поперечной волны для пласта; и
минимальная медленность = 0, при этом
время вступления продольной и/или поперечной волны = медленность продольной/поперечной волны, умноженная на расстояние между излучателем и приемником.
19. Система для получения акустических измерений по п.16, в которой:
отображение или воспроизведение изображения акустических отражателей создается для многочисленных глубин акустического измерения.
20. Система для получения акустических измерений по п.16, где система для получения акустических измерений представляет собой каротажную систему.
21. Система для получения акустических измерений по п.16, где система для получения акустических измерений представляет собой систему измерения в процессе бурения.
22. Система для получения акустических измерений по п.16, в которой акустические измерения представляют собой волновые сигналы, и при выполнении набора инструкций извлекается часть волновых сигналов путем:
суммирования волновых сигналов в плоскости зависимости медленности от времени;
формирования окна обработки вокруг части суммированных волновых сигналов на основании заданных параметров; и
извлечения суммированных волновых сигналов в окне обработки.
23. Система для получения акустических измерений по п.16, в которой акустические измерения представляют собой волновые сигналы, и при выполнении набора инструкций извлекается часть волновых сигналов путем:
выбора части волновых сигналов на основании заданных параметров;
суммирования выбранной части волновых сигналов в плоскости зависимости медленности от времени; и
извлечения суммированных волновых сигналов.
24. Система для получения акустических измерений по п.16, в которой при выполнении набора инструкций обеспечивается отображение или воспроизведение изображения акустических отражателей в реальном времени с акустическими измерениями.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 6459993 B1, 01.10.2002 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ комплексного использования гидролизатов растительных материалов | 1937 |
|
SU57360A1 |
| УСТРОЙСТВО АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1996 |
|
RU2096812C1 |

