ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к приведению в действие инструментов для гибких медицинских приборов, а в частности - к способам и устройствам для приведения в действие эндоскопических инструментов в процессе выполнения медицинских процедур.
УРОВЕНЬ ТЕХНИКИ
Известно использование эндоскопа для исследования полости тела. Преимущества такого использования эндоскопа при диагностике и терапии, обусловленные непосредственным исследованием желудочно-кишечного тракта при помощи гибкого эндоскопа, сделали этот способ стандартной процедурой в современной медицине. Одной из наиболее распространенных эндоскопических процедур является колоноскопия, которая проводится для разнообразных целей, включая диагностику рака, определение источника кровотечения в желудочно-кишечном тракте, осмотр места, пораженного при воспалении кишечника, удаление полипов и лечение заворота кишок и кишечной непроходимости.
Гибкие эндоскопы обычно содержат рабочие каналы, идущие вдоль эндоскопа. Одним из назначений этих каналов является перемещение инструментов через эндоскоп для выполнения диагностических и терапевтических процедур внутри тела. Такие инструменты включают, например, миниатюрные щипцы для биопсии, которые оператор перемещает через канал и выдвигает через дистальный конец эндоскопа для взятия образцов биопсии из исследуемой области. Такими инструментами обычно управляют посредством тросов, идущих через оболочку к дистальному концу эндоскопа позади самого инструмента. На проксимальном конце врач прилагает усилие к тросам, вызывая желаемое действие инструмента на дистальном конце.
Степень управления инструментом в рамках этого технического решения ограничена трением между каждым из тросов и окружающей его оболочкой. В частности, если врачу необходимо преодолеть лишь один поворот в желудочно-кишечном тракте, то сила F1, которую необходимо приложить на проксимальном конце, чтобы создать силу F2 на дистальном конце, может приближаться к значению F1=F2×еμα, где μ - коэффициент трения между тросом и оболочкой, а α - фактический угол, определяемый поворотом в желудочно-кишечном тракте. Если, как это часто имеет место, эндоскоп необходимо провести через i поворотов αi в желудочно-кишечном тракте, то общая сила F1=F2×еμΣ|αi| может значительно возрасти (и часто выйти за допустимые пределы).
Для преодоления воздействия трения, имеющего место в системах, использующих тросы в оболочке, были предприняты попытки применения в эндоскопе технических решений с использованием гидравлики, но ни одно из них не подошло для коммерческой реализации. Все известные изобретателю гидравлические системы такого рода являются сложными, дорогостоящими, громоздкими и/или требующими внешних источников питания или давления, а также оборудования, необходимого для управления такими источниками. Вследствие этих недостатков для управления продвижением эндоскопа и для управления работой инструментов в настоящее время применяются только технологии, основанные на использовании тросов.
В патенте США №5,569,299 на имя Dill et al., включенном в настоящее описание путем ссылки, описаны эндоскопические щипцы для урологической биопсии с одной стационарной губкой и одной подвижной губкой, причем подвижная губка приводится в действие тросом, проходящим внутри полой трубки, к которой крепятся эти две губки. Щипцами управляет специалист путем воздействия на трос на проксимальном конце.
В патенте США №5,431,645 на имя Smith et al., включенном в настоящее описание путем ссылки, описаны способы дистанционного привода эндоскопических инструментов с помощью источников энергии различного типа, включая электрические, механические, гидравлические и пневматические источники, расположенные вблизи проксимального конца эндоскопа.
В патенте США №5,779,646 на имя Koblish et al., включенном в настоящее описание путем ссылки, описан гибкий катетер для взятия биопсии, в котором управляющие тросы, идущие от проксимального конца к дистальному концу катетера, используются для изменения направления дистального наконечника и/или активации губок для взятия биопсии. Управляющие тросы прикреплены к поршню, который находится в цилиндре, имеющемся в ручке на проксимальном конце катетера, причем оператор посредством перемещения поршня может управлять отклонением дистального наконечника и/или приводить в действие губки для взятия биопсии.
В патенте США №5,674,205 на имя Pasricha et al., включенном в настоящее описание путем ссылки, описано устройство для доставки лекарственных средств в какой-либо участок полости тела. Устройство напоминает удлиненный шприц с дистальным поршневым/игольчатым устройством, содержащим дозу лекарственного средства, причем конец шприца, которым управляет врач, используется для приведения в действие дистального устройства посредством заполненной текучей средой трубки, соединяющей дистальный и проксимальный концы.
В патенте США 6,059,719 на имя Yamamoto et al., включенном в настоящее описание путем ссылки, описана эндоскопическая система, содержащая множество эндоскопических модулей с установленными на них различными терапевтическими инструментами, причем эти разные терапевтические модули можно легко заменять. В некоторых примерах реализации настоящего изобретения усилия, необходимые для приведения в действие терапевтических модулей, подаются через передаточный трос, который проходит вдоль эндоскопа. Другие примеры реализации включают заполненный жидкостью канал, соединяющий дистальное поршневое/цилиндрическое устройство с проксимальным средством подачи жидкости под давлением для перемещения дистального поршня. Передаточный трос соединяет дистальный поршень с терапевтическим модулем таким образом, что перемещение дистального поршня приводит в действие терапевтический модуль.
В статье Пайерса [Peirs] и др., озаглавленной "Микроманипулятор для самодвижущегося колоноскопа" (A Micro Robotic Arm For A Self Propelling Colonoscope, см. PROC. Actuator 98, 6th Int. Conf. on New Actuators, pp.576-579, June 1998), которая включена в настоящее описание путем ссылки, описана самодвижущаяся эндоскопическая система для проведения колоноскопии, включающая гибкий манипулятор, которым управляют с помощью материалов, выполненных из сплавов с памятью формы и связанных с эндоскопическими инструментами. Эндоскопическими инструментами управляют или путем нагревания/охлаждения механизмов из сплава с памятью формы, или с использованием гидравлических средств посредством дистального поршневого/цилиндрического устройства. В простом поршневом/цилиндрическом устройстве имеется одно отверстие для подачи давления в цилиндр, поэтому для манипуляции прикрепленным инструментом можно подавать как положительное, так и отрицательное давление.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения в некоторых его аспектах является создание усовершенствованной системы и способа для приведения в действие инструмента внутри полости тела.
Еще одной задачей некоторых аспектов настоящего изобретения является создание усовершенствованного механизма для приведения в действие инструмента внутри полости тела пациента с целью исследования, диагностики или терапии.
Еще одной задачей некоторых аспектов настоящего изобретения является создание усовершенствованного механизма для приведения в действие инструмента внутри полости тела пациента с целью взятия биопсии ткани или выполнения другой процедуры.
В предпочтительных примерах реализации настоящего изобретения эндоскопический инструмент, предназначенный для оказания механического воздействия на ткань или содержимое желудочно-кишечного тракта пациента или другой полости тела, продвигают по каналу в гибком эндоскопе, находящемся в полости. Эндоскопический инструмент приближают к объекту (т.е. к ткани, кишечному конкременту или камню) и приводят в действие при помощи приводного механизма, связанного с инструментом, расположенного около дистального конца канала, оказывая механическое воздействие на объект. Приводной механизм содержит один или несколько цилиндров, в каждом из которых имеется поршень, в результате чего перемещение поршней приводит в действие связующее устройство, соединенное с инструментом и обеспечивающее работу инструмента. Перемещение поршней осуществляют введением жидкости в соответствующие цилиндры или удалением ее из соответствующих цилиндров. Жидкость перемещается от проксимального конца эндоскопа к цилиндрам приводного механизма рядом с дистальным концом эндоскопа по замкнутой системе, состоящей из одной или нескольких гибких трубок, идущих через рабочий канал. В этих примерах реализации настоящего изобретения устраняется необходимость в приводных тросах для инструмента, идущих вдоль эндоскопа, что устраняет проблемы (например, трение), обычно присущие приводным механизмам на основе тросов.
Предпочтительно, чтобы инструмент приводился в действие путем оказывания давления на поршни в приводном механизме за счет подачи под давлением текучей среды к поршням, а не за счет удаления текучей среды от поршней, как в известных инструментах с гидравлическим приводом. В контексте настоящего описания и формулы изобретения "приведение в действие" инструмента означает выполнение операции, требующей создания этим инструментом некоторого усилия, например при сжимании щипцов для биопсии. В приводных механизмах, работа которых основана на удалении текучей среды из гидравлического механизма, можно создать отрицательное давление величиной только в одну атмосферу, поэтому усилия, развиваемые инструментом, ограничены. Когда жидкость давит на поршни с положительным давлением, можно развить значительно большие усилия.
В приводном механизме средства для подачи жидкости через гибкие трубки в цилиндры предпочтительно расположены около проксимального конца эндоскопа, т.е. внешнего по отношению к пациенту. В одном из предпочтительных примеров реализации настоящего изобретения для приложения давления к жидкости в гибких трубках, а следовательно, для управления работой приводного механизма, используется приводная поршневая/цилиндрическая система. Предпочтительно, чтобы для перемещения одного или нескольких приводных поршней в соответствующих цилиндрах оператор использовал движение руки и/или ноги, приводящее в результате к перемещению жидкости в цилиндры или из цилиндров приводного механизма и, следовательно, к перемещению соответствующих поршней и функционированию инструмента, расположенного вблизи дистального конца эндоскопа. Таким образом, физические усилия, затрачиваемые оператором, полностью или пропорционально прикладываются к приводимому в действие эндоскопическому инструменту, давая оператору ощущение обратной связи. Обычно после относительно короткого периода обучения и практики оператор знает величину усилия, которое необходимо приложить к механическому устройству в интерфейсе пользователя, например к джойстику, для управления работой инструмента в рамках конкретной процедуры. Использование рычагов или других возможностей механической и/или гидравлической конструкции приводного механизма позволяет управлять физическим усилием, необходимым для приведения инструмента в действие.
В одном из предпочтительных примеров реализации настоящего изобретения в каждом цилиндре приводного механизма имеется одно отверстие для входа или выхода текучей среды с целью перемещения соответствующего поршня. Поршни разделяют каждый цилиндр приводного механизма на две области: (а) область перемещения текучей среды, включающая отверстие, через которое активно подается или выводится текучая среда, и (б) пассивную область, которая может быть открытой на одном конце или может содержать пружину или заданное количество сжимаемой текучей среды, например воздуха. Предпочтительно, чтобы цилиндр приводного механизма был ориентирован вдоль продольной оси эндоскопа, а область перемещения текучей среды была расположена ближе к дистальному концу эндоскопа, чем пассивная область. Такая конфигурация предпочтительна в некоторых случаях, поскольку, когда текучая среда поступает к дистальному концу одного из цилиндров приводного механизма, в элементах приводного механизма, соединяющих поршень с инструментом, создается растягивающее усилие, что снижает возможность изгибания тонких элементов при сжимающих нагрузках. Механические связующие устройства между двумя или большим количеством цилиндров приводного механизма предпочтительно способны выдержать растягивающие усилия в этих элементах приводного механизма при подаче текучей среды в область перемещения текучей среды в одном или нескольких цилиндрах. Альтернативно или дополнительно, к цилиндрам приводного механизма присоединяют один или несколько стержней соответствующей конфигурации, которые оказываются сжатыми в процессе подачи или удаления текучей среды в область перемещения текучей среды в цилиндре (цилиндрах) и, таким образом, облегчают приведение инструмента в действие.
В случаях, когда пассивная область каждого цилиндра приводного механизма содержит сжимаемую текучую среду (например, воздух), эта текучая среда обычно действует по существу как пружина, стремясь возвратить поршень к положению равновесия. Альтернативно или дополнительно, эта область может содержать жесткую пружину, способствующую возврату поршня в положение равновесия в отсутствие приложения к цилиндру внешнего давления.
В другом предпочтительном примере реализации настоящего изобретения в каждом цилиндре приводного механизма имеется два отверстия - по одному с каждой стороны поршня, - соединенных соответственно с двумя областями перемещения текучей среды в цилиндре, в который или из которого текучая среда активно входит или выходит. Гидравлическое давление передается от проксимального конца эндоскопа к каждому отверстию по гибким трубкам. Перемещение данного поршня в приводном механизме вызывается разностью давления с противоположных сторон поршня. Регулируя давление с каждой стороны поршня, достигают точного управления усилием, с которым поршнем воздействует на связующее устройство приводного механизма. Предпочтительно, чтобы в течение соответствующих периодов приведения в действие инструмента давление с обеих сторон поршня было положительным.
Таким образом, согласно одному из примеров реализации настоящего изобретения предлагается эндоскопическое устройство, имеющее дистальный конец, предназначенный для введения в тело пациента, и проксимальный конец, который удерживается вне тела пациента, причем устройство содержит:
проксимальный цилиндр, расположенный вблизи проксимального конца эндоскопического устройства;
проксимальный поршень, установленный внутри проксимального цилиндра с возможностью скольжения;
дистальный цилиндр, расположенный вблизи дистального конца эндоскопического устройства;
дистальный поршень, установленный с возможностью скольжения внутри дистального цилиндра;
трубку для текучей среды, соединяющую проксимальный и дистальный цилиндры; и
инструмент, присоединенный таким образом, чтобы приводиться в действие при смещении дистального поршня с тем, чтобы оказывать механическое воздействие на ткани тела или содержимое тела в ответ на смещение дистального поршня.
В одном из примеров реализации настоящего изобретения указанные инструмент, дистальный цилиндр, дистальный поршень и трубка выполнены с возможностью прохода через рабочий канал эндоскопа для того, чтобы при использовании эндоскопа получать доступ к какой-либо области внутри тела.
В другом примере реализации настоящего изобретения указанный инструмент выполнен с возможностью получения доступа к части желудочно-кишечного тракта пациента.
В некоторых случаях применения указанный инструмент содержит биопсийный инструмент. Альтернативно или дополнительно, указанный инструмент содержит терапевтический инструмент.
Согласно одному из примеров реализации настоящего изобретения
(а) указанный дистальный цилиндр имеет две области на соответствующих сторонах дистального цилиндра,
(б) указанная трубка выполнена с возможностью сообщения с первой из этих областей,
(в) вторая область выполнена таким образом, что перемещение указанного дистального поршня в первом направлении изменяет давление текучей среды во второй области, и
(г) указанный дистальный поршень соединен с дистальным цилиндром таким образом, что при изменении давления текучей среды испытывает усилие во втором направлении, противоположном первому направлению.
В некоторых случаях применения проксимальный поршень может быть выполнен с возможностью управления им вручную. В одном из примеров реализации настоящего изобретения устройство включает связующее устройство, соединенное с проксимальным поршнем и выполненное с возможностью облегчения ручного управления проксимальным поршнем.
В некоторых применениях инструмент соединен с дистальным поршнем и приводится в действие при повышении давления в трубке с помощью жидкости в результате манипуляции проксимальным поршнем. Например, инструмент может включать щипцы, и приведение в действие инструмента путем создания давления в трубке вызывает закрывание щипцов. Альтернативно, инструмент включает хирургическую петлю, и приведение в действие инструмента путем создания давления в трубке вызывает затягивание петли.
Кроме того, согласно еще одному из примеров реализации настоящего изобретения предлагается эндоскопическое устройство, имеющее дистальный конец, предназначенный для введения в тело пациента, и проксимальный конец, который удерживается вне тела пациента, причем устройство содержит:
дистальный поршень;
дистальный цилиндр, внутри которого установлен с возможностью скольжения дистальный поршень и который находится вблизи дистального конца эндоскопического устройства, причем в дистальном цилиндре имеется первое дистальное отверстие, расположенное с проксимальной стороны от дистального поршня, и второе дистальное отверстие, расположенное с дистальной стороны от дистального поршня;
инструмент, присоединенный таким образом, чтобы приводиться в действие при смещении дистального поршня;
проксимальный поршень;
проксимальный цилиндр, внутри которого установлен с возможностью скольжения проксимальный поршень и который расположен вблизи проксимального конца эндоскопического устройства, причем в проксимальном цилиндре имеется первое проксимальное отверстие, расположенное с проксимальной стороны от проксимального поршня, и второе проксимальное отверстие, расположенное с дистальной стороны от проксимального поршня; и
первую и вторую трубки, причем первая трубка соединяет одно из проксимальных отверстий с одним из дистальных отверстий, а вторая трубка соединяет другое проксимальное отверстие с другим дистальным отверстием таким образом, что:
(а) перемещение проксимального поршня в проксимальном направлении приводит к перемещению жидкости по одной из трубок, создавая с первой стороны дистального поршня положительное давление для того, чтобы перемещать дистальный поршень в первом направлении и приводить инструмент в действие, переводя его в первое состояние, и
(б) перемещение проксимального поршня в дистальном направлении приводит к перемещению текучей среды по другой трубке, создавая со второй стороны дистального поршня положительное давление для того, чтобы перемещать дистальный поршень во втором направлении и приводить инструмент в действие, переводя его во второе состояние.
В одном из примеров реализации настоящего изобретения инструмент, дистальный цилиндр, дистальный поршень и трубка выполнены с возможностью прохода через рабочий канал эндоскопа для того, чтобы при использовании эндоскопа получать доступ к какому-либо участку внутри тела.
Еще в одном примере реализации настоящего изобретения инструмент выполнен с возможностью получения доступа к части желудочно-кишечного тракта пациента.
Для некоторых применений указанный инструмент содержит биопсийный инструмент и/или терапевтический инструмент.
В одном из примеров реализации настоящего изобретения проксимальный поршень выполнен с возможностью манипуляции им вручную. Например, указанное устройство может включать связующее устройство, соединенное с проксимальным поршнем и выполненное с возможностью облегчения ручного управления проксимальным поршнем.
Кроме того, согласно еще одному из примеров реализации настоящего изобретения предлагается эндоскопическое устройство, имеющее дистальный конец, предназначенный для введения в тело пациента, и проксимальный конец, который удерживается вне тела пациента, причем устройство содержит:
первый и второй проксимальные цилиндры, расположенные вблизи проксимального конца эндоскопического устройства;
первый и второй проксимальные поршни, установленные внутри соответствующих проксимальных цилиндров с возможностью скольжения;
по меньшей мере один дистальный цилиндр, расположенный вблизи дистального конца эндоскопического устройства;
по меньшей мере один дистальный поршень, установленный внутри указанного по меньшей мере одного дистального цилиндра с возможностью скольжения;
первую трубку для текучей среды, соединяющую первый проксимальный цилиндр и по меньшей мере один дистальный цилиндр;
вторую трубку для текучей среды, соединяющую второй проксимальный цилиндр и по меньшей мере один дистальный цилиндр;
механическое связующее устройство, соединенное с первым и вторым проксимальными поршнями и предназначенное: (а) для перемещения первого проксимального поршня и создания положительного давления в первой трубке при перемещении механического связующего устройства в первом направлении и (б) для перемещения второго проксимального поршня и создания положительного давления во второй трубке при перемещении механического связующего устройства во втором направлении; и
инструмент, присоединенный таким образом, чтобы приводиться в действие при смещении по меньшей мере одного дистального поршня, с тем чтобы осуществлять механическое воздействие на ткани тела или содержимое тела в ответ на смещение дистального поршня.
Настоящее изобретение станет понятнее из последующего подробного описания предпочтительных примеров его реализации со ссылками на следующие сопроводительные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 схематично показано сечение эндоскопического инструмента, включающего гидравлический приводной механизм согласно предпочтительному примеру реализации настоящего изобретения;
на фиг.2 схематично показано сечение эндоскопического инструмента, включающего гидравлический приводной механизм согласно другому предпочтительному примеру реализации настоящего изобретения;
на фиг.3 схематично показано сечение эндоскопического инструмента, включающего гидравлический приводной механизм согласно еще одному предпочтительному примеру реализации настоящего изобретения;
на фиг.4 схематично показано сечение эндоскопического инструмента, включающего гидравлический приводной механизм согласно еще одному предпочтительному примеру реализации настоящего изобретения;
на фиг.5 схематично показано сечение эндоскопического инструмента, включающего гидравлический приводной механизм согласно еще одному предпочтительному примеру реализации настоящего изобретения; и
на фиг.6 схематично показано сечение эндоскопического инструмента, включающего гидравлический приводной механизм согласно еще одному предпочтительному примеру реализации настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
На фиг.1 схематично изображено сечение гибкого эндоскопического устройства 100, содержащего инструмент с гидравлическим приводом и выполненного согласно предпочтительному примеру реализации настоящего изобретения. Эндоскопическое устройство 100 содержит дистальную часть 102, которую продвигают через рабочий канал 82 эндоскопа 80, помещенного в желудочно-кишечный тракт пациента. Устройство 100 содержит также проксимальную часть 104, которая частично остается вне пациента и является доступной для оператора, работающего с инструментом. Как правило, указанный инструмент содержит биопсийный инструмент 115, включающий две противоположные губки 114 для взятия биопсии. Инструмент 115 расположен около дистального конца устройства 100 и предназначен для иссечения ткани или взятия образца ткани в желудочно-кишечном тракте.
Средство для приведения в действие инструмента 115 расположено около дистального конца части 102. В предпочтительном примере реализации настоящего изобретения каждая из губок 114 для взятия биопсии содержит ложкообразный рычаг и поворачивается относительно общей точки поворота 113, так, что ложкообразная часть каждого рычага способна захватить и рассечь ткань. Поворотная точка 113 связана с торцевым колпачком 112, который присоединен к дистальному концу устройства 100. Перемещение клиновидного элемента 110 приводит в действие губки 114, причем дистальное перемещение элемента 110, то есть перемещение его в дистальном направлении (вверх на фиг.1), приводит к смыканию губок для взятия биопсии, в то время как проксимальное перемещение элемента 110, то есть его перемещение в проксимальном направлении (вниз), приводит к размыканию губок для взятия биопсии. В предпочтительном примере реализации настоящего изобретения инструмент 115 содержит пружину 130, которая служит для открывания губок 114 для взятия биопсии при перемещении элемента 110 в проксимальном направлении.
Для ограничения перемещения поршня 108 при подаче положительного давления механические стопоры 118 предпочтительно установлены внутри части 102 в дистальном направлении относительно поршня 108. Как правило, при продвижении устройства 100 через рабочий канал 82 к поршню 108 прикладывают давление для того, чтобы прижимать поршень 108 к стопором 118 и удерживать губки 114 в сомкнутом положении.
Элемент 110 соединен с дистальным поршнем 108 стержнем 120, так что перемещение поршня 108 сопровождается равным по величине перемещением элемента 110. Предпочтительно, чтобы отношение длины стержня 120 к его диаметру было относительно малым (например, менее 10), так чтобы стержень 120 был способен передавать сжимающее усилие без перекашивания или значительного изгиба. Альтернативно, стержень 120 может отсутствовать, а поршень 108 может быть установлен непосредственно на элементе 110.
Инструмент 115 приводится в действие перемещением проксимального поршня 106, который изменяет давление в заполненной текучей средой трубке 116 между поршнем 106 и поршнем 108 и управляет силой, действующей на поршень 108. Предпочтительно, чтобы трубка 116 была заполнена по существу несжимаемой биологически совместимой текучей средой (например, водой или физиологическим раствором). Повышение давления в трубке 116 с использованием поршня 106 приводит к перемещению поршня 108 в дистальном направлении и, следовательно, к смыканию губок 114. Оператор начинает перемещать поршень 106 посредством механического связующего устройства 122, соединенного с поршнем 106 и доступного для оператора вблизи дистального конца части 104. В предпочтительном примере реализации настоящего изобретения связующее устройство 122 представляет собой простой стержень, движение которого передается непосредственно поршню 106. Альтернативно, связующее устройство 122 может содержать джойстик, колесико или другой механизм, облегчающий использование инструмента за счет, например, уменьшения усилия, необходимого со стороны оператора. Необходимо заметить, что использование проксимального поршня 106 устраняет необходимость в более сложном проксимальном прижимном устройстве, которое требуется при работе с известными гидравлическими эндоскопическими инструментами для взятия биопсии.
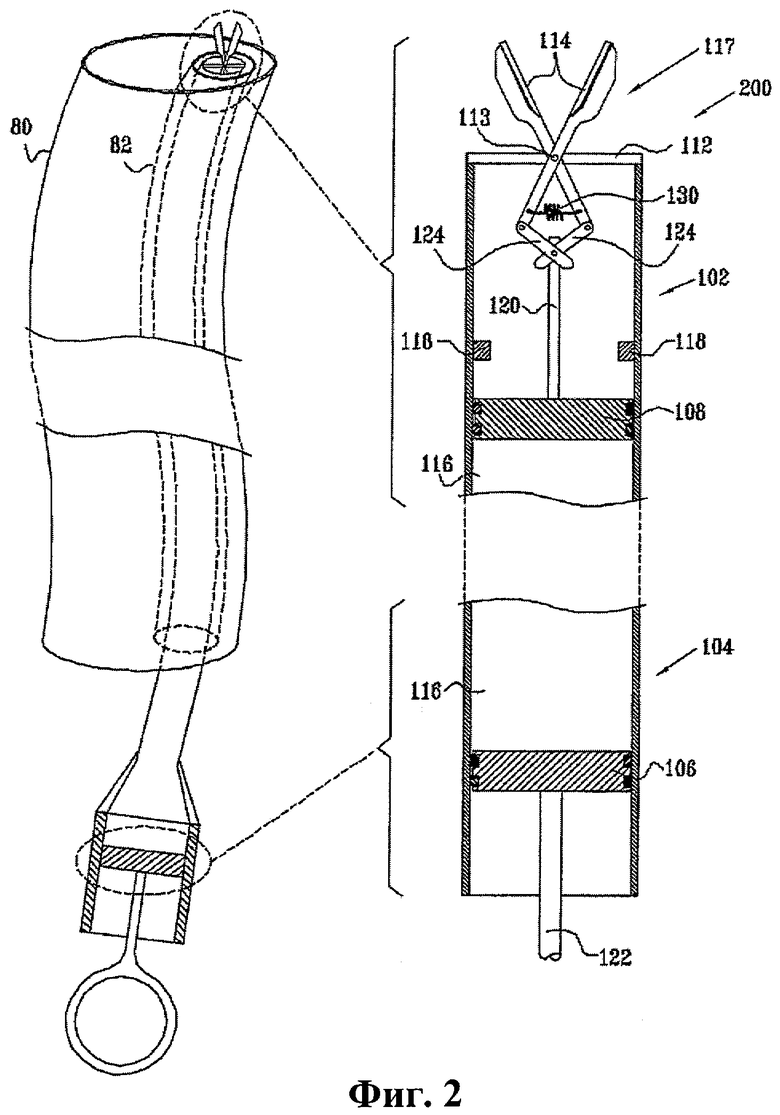
На фиг.2 схематично показано сечение гибкого эндоскопического устройства 200, содержащего инструмент с гидравлическим приводом и выполненного согласно предпочтительному примеру реализации настоящего изобретения. В основном, устройство 200 работает аналогично устройству 100, описанному выше со ссылками на фиг.1, но содержит другой механизм преобразования перемещения поршня 108 в действие инструмента 117 для взятия биопсии.
Перемещение поршня 108 в результате изменения давления в трубке 116 передается стержню 120, соединительным элементам 124 и проксимальным концам губок 114 для взятия биопсии. При этом дистальное перемещение поршня 108 приводит к размыканию губок 114 и к растягиванию пружины 130, тогда как проксимальное перемещение поршня 108 приводит к смыканию губок 114 с помощью пружины 130. Таким образом, смыкание губок 114 биопсийного инструмента 117 сопровождается растяжением стержня 120 и соединительных элементов 124, что уменьшает возможность изгибания этих частей. Кроме того, изменяя размер соединительных элементов в инструменте 117, можно регулировать усилие, прилагаемое к губкам 114 для взятия биопсии, достигая желательной пропорции от усилия, прилагаемого к поршню 106.
Использование проксимального поршня 106 устраняет необходимость в более сложном проксимальном прижимном устройстве, которое требуется при работе с известными гидравлическими эндоскопическими инструментами для взятия биопсии.
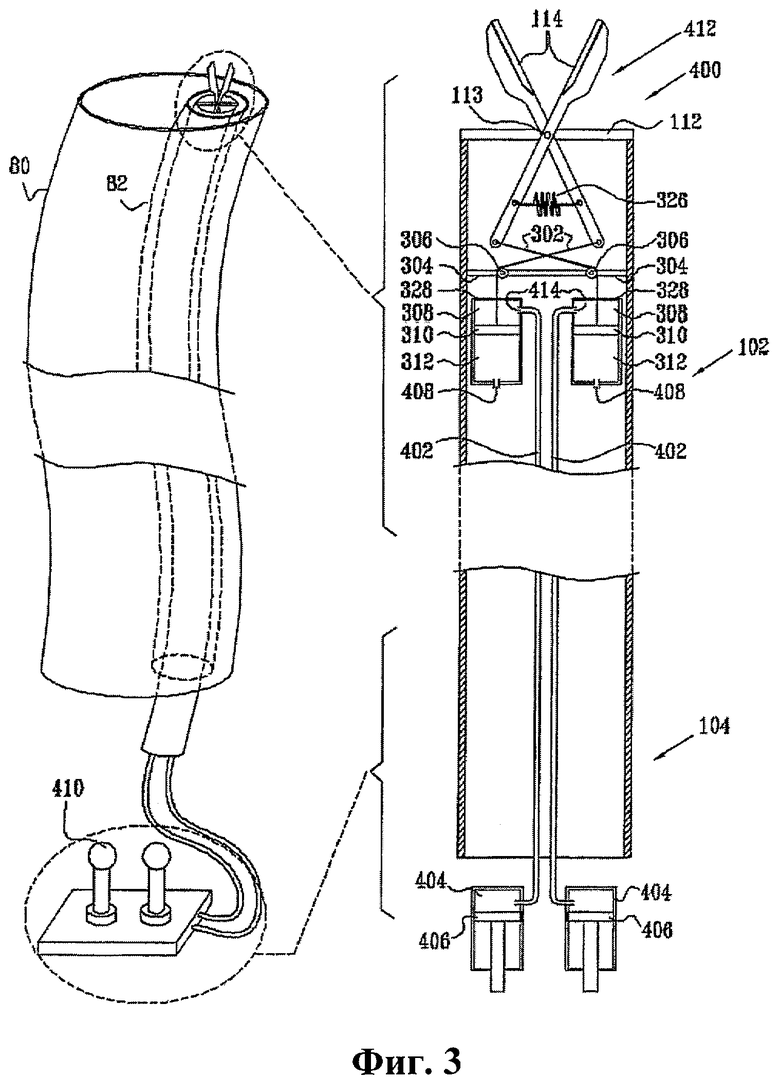
На фиг.3 схематично показано сечение гибкого эндоскопического устройства 400, содержащего инструмент 412 с гидравлическим приводом и выполненного согласно предпочтительному примеру реализации настоящего изобретения. Средство для облегчения работы с инструментом расположено в части 102 и предпочтительно содержит несколько цилиндров 328, в каждом из которых расположен поршень 310. Предпочтительно, чтобы несколько цилиндров 328 давали врачу возможность независимого управления любой из губок 114, то есть возможность работать инструментом 412 вне центральной оси эндоскопического устройства 400. Очевидно, что увеличение степеней свободы при использовании нескольких цилиндров 328 дает преимущество и для других эндоскопических инструментов или комплектов инструментов (не показаны), используемых в других случаях применения.
Каждый поршень 310 предпочтительно соединен с одним из концов соответствующих тросов 302. Противоположные концы тросов 302 соединены с соответствующими частями губок 114 для взятия биопсии. В предпочтительном примере реализации настоящего изобретения поперечный элемент 304, соединенный с частью 102, содержит несколько блоков 306, предназначенных для прокладки тросов 302 между поршнями 310 и губками 114.
Перемещение поршней 310 осуществляется текучей средой, входящей в цилиндры 328 или выходящей из них через гибкие трубки 402. Предпочтительно, чтобы каждый цилиндр 328 был ориентирован параллельно продольной оси эндоскопа, а текучая среда входила или выходила через отверстие 414, расположенное вблизи дистального конца цилиндра. Таким образом, каждый цилиндр разделен поршнем 310 на две секции: (а) секцию 308 перемещения жидкости, которая расположена вблизи дистального конца части 102 и в которой происходит перемещение текучей среды, и (б) пассивную секцию 312, расположенную вблизи проксимального конца части 102.
Предпочтительно, чтобы к губкам 114 для взятия биопсии была присоединена пружина 326, стремящаяся разомкнуть губки. Таким образом, для перемещения поршней 310 в дистальном направлении и размыкания губок 114 всасывающее воздействие по отношению к цилиндрам 328 оказывается минимальным или вообще не нужным. Это уменьшение использования всасывающего воздействия устраняет потенциальные проблемы, связанные со сплющиванием гибких трубок 402. Кроме того, всасывание как средство для обеспечения полезного перемещения в эндоскопе в общем случае ограничено давлением в одну атмосферу, в то время как положительное давление может превышать одну атмосферу. В экспериментах, выполненных с использованием принципов настоящего изобретения, на дистальном конце создавалось положительное давление в 50 атмосфер при использовании лишь усилий, легко развиваемых вручную с помощью простого и недорогого предпочтительного устройства, предлагаемого согласно иллюстрируемым примерам реализации настоящего изобретения. Следует подчеркнуть, что для известных систем гидравлических эндоскопических инструментов для взятия биопсии в общем случае требуется сложное и дорогое оборудование, для работы которого используются насосы и устройства для регулировки давления или другое силовое оборудование.
Для некоторых применений в пассивной секции 312 каждого цилиндра 328 имеется отверстие 408, позволяющее текучей среде (обычно воздуху) входить или выходить при перемещении поршня 310. В предпочтительном примере реализации настоящего изобретения пассивная секция цилиндра 328 содержит упругий элемент, например пружину, которая может заменять пружину 326 и удерживает поршень 310 в положении равновесия. Альтернативно, пассивная секция цилиндра 328 может быть герметичной и содержать сжимаемую текучую среду (например воздух), которая при перемещении поршня 310 действует как пружина и возвращает поршень в положение равновесия.
Текучая среда входит в каждый цилиндр 328 или выходит из него в ответ на действие соответствующего приводного поршня 406 в приводном цилиндре 404. Каждый приводной поршень 406 предпочтительно соединен с соответствующим цилиндром 328 одной из гибких трубок 402. Приложение к приводному поршню 406 дистально направленной силы сжимает текучую среду в приводном цилиндре 404. Это давление передается через текучую среду в трубке 402 и цилиндре 328 и действует на поршень 310, обусловливая работу инструмента 412, как описано выше. В частности, дистальное перемещение поршней 406 вызывает смыкание губок 114, тогда как расширение пружины 326 вызывает размыкание губок 114. В общем случае, отношение движущей силы, приложенной к приводному поршню 406, к силе давления, действующей на поршень 310, пропорционально отношению площадей поверхностей этих двух поршней. Таким образом, точное управление инструментом 412 может быть достигнуто путем уменьшения площади поршня 406 по сравнению с площадью поршня 310. При этом перемещения поршня 406, выполненные оператором, можно преобразовать в точные перемещения поршня 310. Силу, необходимую для работы инструмента, можно отрегулировать путем подбора размеров приводного поршня 406 и поршня 310 соответственно.
В некоторых предпочтительных примерах реализации настоящего изобретения для приведения в действие поршней 406 и с целью сделать работу с инструментом более эргономичной используется механическое связующее устройство 410, например джойстик, механически соединенное с поршнями 406. В случаях использования на дистальном и/или проксимальном концах эндоскопа большего количества цилиндров связующее устройство изменяется соответствующим образом с тем, чтобы облегчить работу оператора.
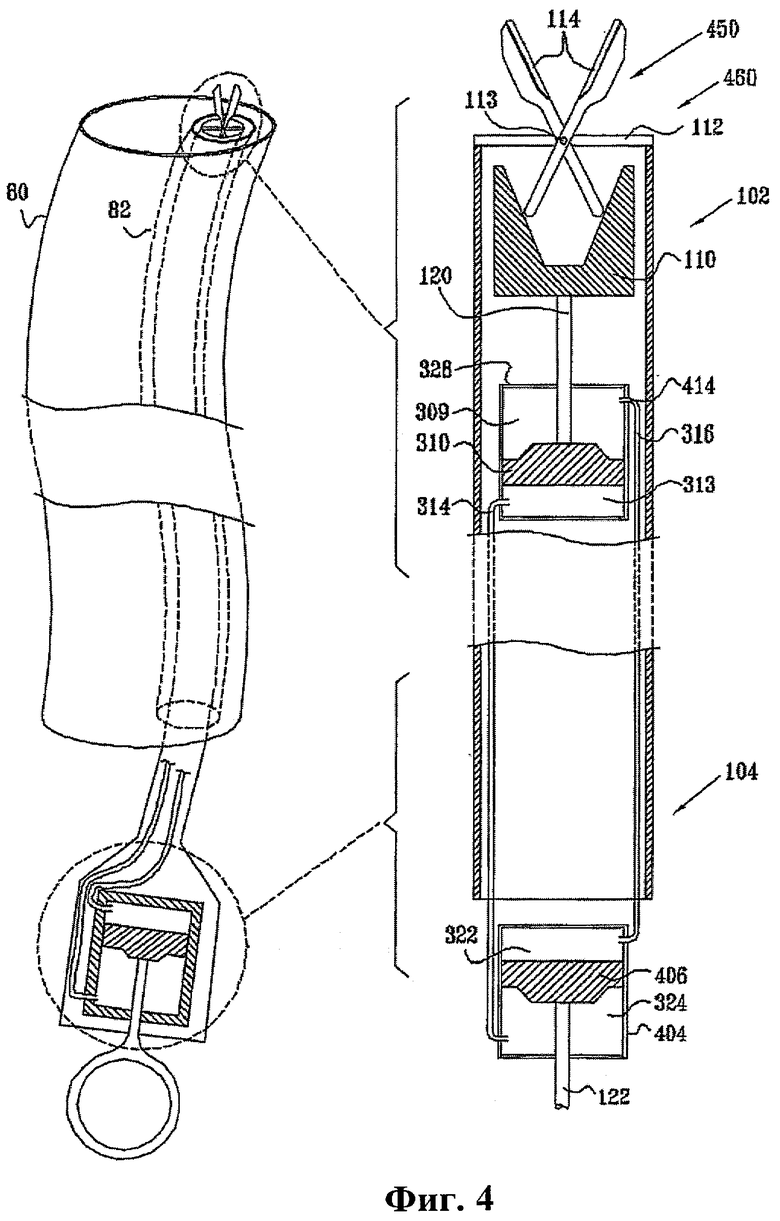
На фиг.4 схематично показано сечение гибкого эндоскопического устройства 460, содержащего инструмент 450 с гидравлическим приводом и выполненного согласно предпочтительному примеру реализации настоящего изобретения. Как описано выше со ссылками на фиг.1, перемещение клиновидного элемента 110 приводит в действие губки 114 для взятия биопсии таким образом, что дистальное перемещение элемента 110 приводит к смыканию губок для взятия биопсии, тогда как проксимальное перемещение вызывает размыкание губок для взятия биопсии. В отличие от некоторых известных гидравлических устройств для взятия биопсии инструмент 450 предпочтительно не содержит пружину, служащую для размыкания и смыкания губок 114 для взятия биопсии.
Действие инструмента 450 инициируется перемещением приводного поршня 406 под воздействием оператора. Перемещение приводного поршня 406 приводит к изменению давления в дистальной гибкой трубке 316 и проксимальной гибкой трубке 314, которые соответственно соединяют: (а) дистальную приводную часть 322 приводного цилиндра 404 с дистальной частью 309 цилиндра 328 и (б) проксимальную приводную часть 324 приводного цилиндра 404 с проксимальной частью 313 цилиндра 328. Таким образом, достигается точное управление силой, действующей на поршень 310. Предпочтительно, чтобы трубки 314 и 316 были заполнены по существу несжимаемой биологически совместимой текучей средой (например водой или физиологическим раствором).
Оператор инициирует перемещение поршня 406 посредством механического связующего устройства 122, соединенного с поршнем 406 и доступного для оператора вблизи проксимального конца части 104. Предпочтительно, чтобы перемещение поршня 310 как в проксимальном, так и в дистальном направлении достигалось созданием положительного давления в трубках 316 и 314 соответственно. В частности, проксимальное перемещение приводного поршня 406 приводит к смыканию губок 114, а дистальное перемещение приводного поршня 406 приводит к размыканию губок 114. Таким образом, в примере реализации настоящего изобретения, показанном на фиг.4, в ответ на приложение положительного давления выполняется активная работа в обоих направлениях, обычно без использования пружины. Предпочтительно, чтобы для размыкания и смыкания губок для взятия биопсии или для соответствующих действий других эндоскопических инструментов можно было легко создать высокие уровни положительного гидравлического давления.
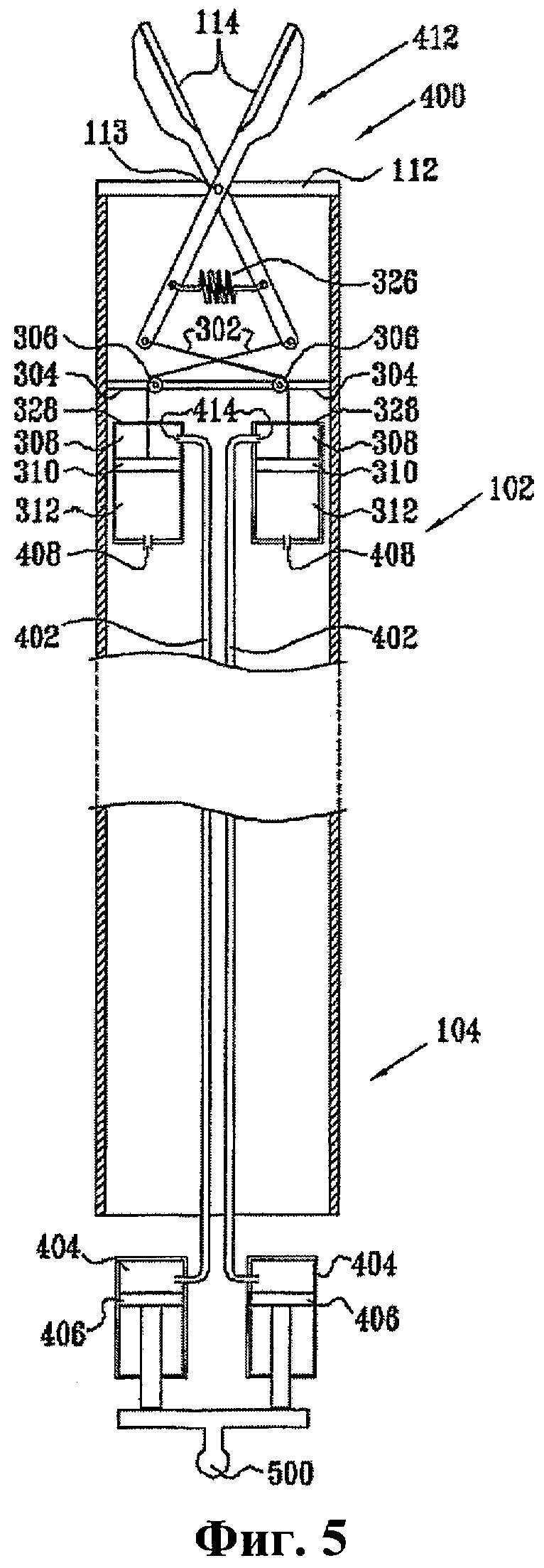
На фиг.5 схематично показано сечение гибкого эндоскопического устройства 400, содержащего инструмент 412 с гидравлическим приводом и выполненного согласно предпочтительному примеру реализации настоящего изобретения. Пример реализации настоящего изобретения, показанный на фиг.5, в основном аналогичен примеру, изображенному на фиг.3, за исключением того, что механическое связующее устройство 410, изображенное на фиг.3 с двумя джойстиками, заменено на фиг.5 одним джойстиком 500. Когда джойстик 500 перемещается пользователем в одном направлении, давление в одном из приводных цилиндров 404 повышается, создавая соответствующее повышение давления в соединенной с ним гибкой трубке 402. Когда джойстик 500 перемещается в другом направлении, повышается давление в другом из приводных цилиндров 404, создавая соответствующее повышение давления в соединенной с этим приводным цилиндром гибкой трубке 402.
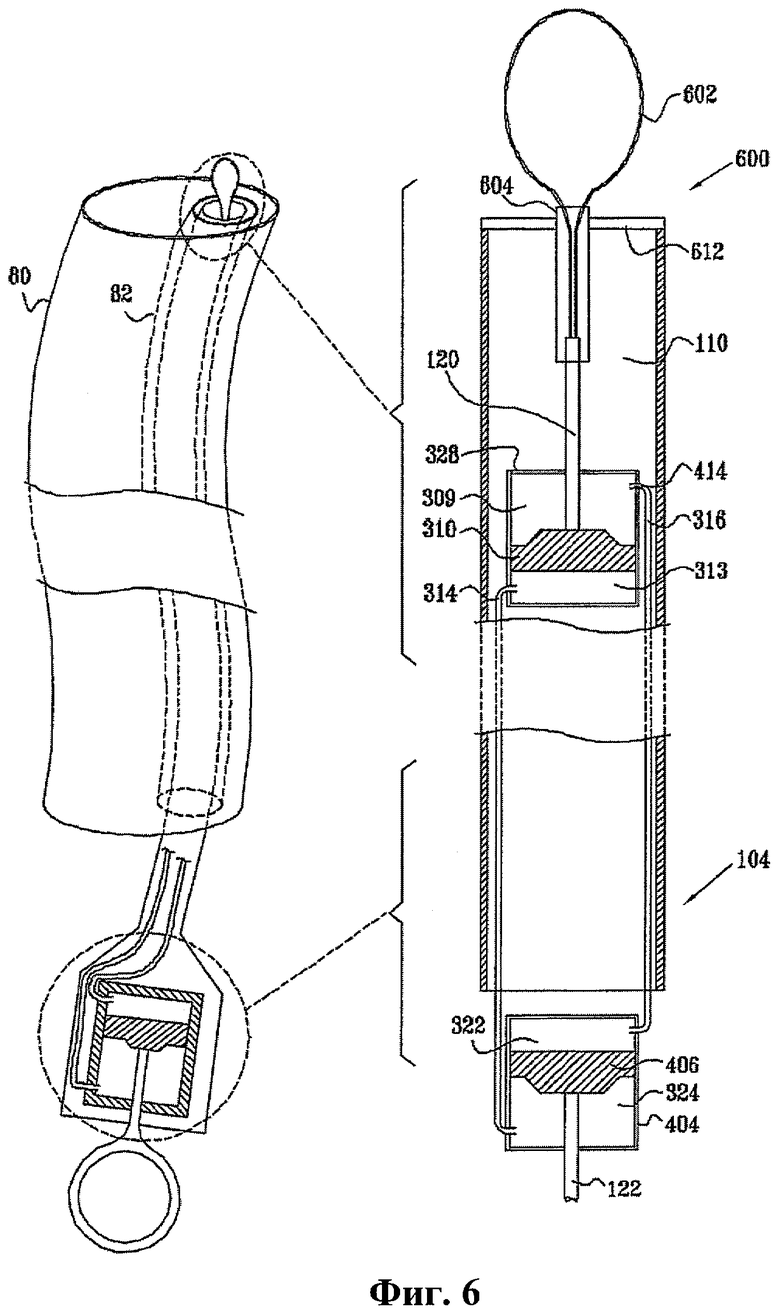
На фиг.6 схематично показано сечение гибкого эндоскопического устройства 600, содержащего хирургическую петлю 602 с гидравлическим приводом и выполненного согласно предпочтительному примеру реализации настоящего изобретения. Эндоскопическое устройство 600 в основном аналогично эндоскопическому устройству 460, описанному выше со ссылками на фиг.4, за исключением того, что губки 114 для взятии биопсии и соответствующее устройство, изображенное на фиг.4, заменяются в данном примере реализации настоящего изобретения, показанном в фиг.6, петлей 602. Обычно петлю 602 используют для захвата полипа или другой части ткани пациента. Когда петлю постепенно втягивают в кожух 604, который прикреплен к дистальному концу 612 эндоскопического устройства 600, происходит удаление ткани.
Действие петли 602 инициируется перемещением приводного поршня 406. Перемещение приводного поршня 406 приводит к изменению давления в дистальной гибкой трубке 316 и проксимальной гибкой трубке 314, как описано выше. При этом обычно достигается точное управление силой, действующей на поршень 310. Перемещение поршня 310, в свою очередь, предпочтительно преобразуется непосредственно в действие (то есть раскрывание или затягивание) петли 602. Таким образом, раскрывание и затягивание петли 602 обычно достигается созданием положительного давления в трубках 314 и 316 соответственно.
Желательно, чтобы петля 602 могла быть заменена убирающимися щипцами или другими известными медицинскими инструментами.
В одном из предпочтительных примеров реализации настоящего изобретения описанное здесь техническое решение используется в совокупности со способами и устройством, описанными в находящейся на рассмотрении предварительной заявке №60/395694 на патент США под названием "Эндоскопическая управляющая система с поршневым приводом" [Piston-actuated endoscopic steering system], которая была подана 11 июля 2002 года с последующей передачей прав настоящему заявителю и которая включена в настоящее описание путем ссылки. В указанной заявке отмечается следующее:
"В предпочтительных примерах реализации настоящего изобретения дистальную секцию гибкого эндоскопа продвигают через желудочно-кишечный тракт при помощи управляющего механизма, расположенного вблизи дистального конца эндоскопа. Управляющий механизм содержит один или несколько цилиндров, в каждом из которых имеется поршень, причем перемещение одного или нескольких поршней приводит в действие стержни и/или тросы в управляющем механизме, вызывая поворот дистального конца эндоскопа. Перемещение одного или нескольких поршней достигается подачей текучей среды в соответствующие цилиндры или удалением ее из этих цилиндров для того, чтобы обеспечить перемещение поршня. Текучая среда выходит из проксимального конца эндоскопа и поступает в цилиндры управляющего механизма, расположенного вблизи дистального конца эндоскопа, через замкнутую систему гибких трубок".
Альтернативно или дополнительно, описанное здесь техническое решение применимо в совокупности со способами и устройством, описанными в международной патентной заявке РСТ, опубликованной под номером WO 00/44275, под названием "Поступательное перемещение зонда в толстой кишке с использованием гибкого рукава" [Propulsion of a probe in the colon using a flexible sleeve] и в соответствующей национальной заявке №09/646941 на патент США, которые были переданы заявителю настоящей заявки и включены в настоящее описание путем ссылки. В заявке WO 00/44275 указано следующее:
"В предпочтительных примерах реализации настоящего изобретения зонд, содержащий эндоскопический прибор, продвигают через нижний желудочно-кишечный тракт пациента путем надувания гибкого рукава, соединенного с зондом. Один конец рукава закреплен обычно на анусе пациента или рядом с анусом. При надувании рукава, предпочтительно с использованием сжатого газа, зонд проталкивается вперед, и рукав постепенно подается между зондом и анусом. Надутая часть рукава расширяется наружу в радиальном направлении и остается по существу неподвижной относительно кишечной стенки до тех пор, пока рукав находится в надутом состоянии. Продольное перемещение рукава относительно стенки происходит только в месте нахождения зонда и рядом с ним. Таким образом, зонд вводится легко, и возможность травмирования желудочно-кишечного тракта сведена к минимуму. Для удаления зонда рукав сдувается и используется для вытягивания зонда назад через анус."
"В других предпочтительных примерах реализации настоящего изобретения рукав хранится в сложенном состоянии и обычно сложен или свернут внутри зонда или в непосредственной близости от него. Наиболее предпочтительно, чтобы сложенный или свернутый рукав находился в углублении в проксимальной части зонда. При продвижении зонда рукав постепенно подается из сложенного состояния и развертывается вдоль кишечной стенки."
"В предпочтительных примерах реализации настоящего изобретения продвижение зонда через желудочно-кишечный тракт путем надувания рукава уменьшает или полностью устраняет необходимость приложения механического усилия на проксимальном конце зонда (вне тела пациента) с целью введения зонда в противоположность тому, как это имеет место при использовании известных эндоскопов. Таким образом, в настоящем изобретении снижена или полностью устранена необходимость приложения сконцентрированного локального давления к любой части тела пациента, снижено или устранено трение между блоком или его частями и телом пациента и отпадает необходимость в введении текучей среды или других материалов в проход в теле".
Согласно одному из предпочтительных примеров реализации настоящего изобретения путем комбинации технических решений настоящего изобретения с техническими решениями, описанными в заявках "Эндоскопическая управляющая система с поршневым приводом" и "Поступательное перемещение зонда в толстой кишке с использованием гибкого рукава", предлагается эндоскоп, который выполняет по существу все перемещения (то есть работу с инструментом, управление и поступательное перемещение) без потребности в использовании тросов или других элементов, которые, как известно, иногда оказывают нежелательное воздействие на желудочно-кишечный тракт и/или создают избыточные силы трения во время процедуры.
Вышеописанные предпочтительные примеры реализации настоящего изобретения даны именно в качестве примеров и не ограничивают объем настоящего изобретения. Напротив, объем настоящего изобретения включает также комбинации и подкомбинации различных признаков, описанных выше, а также их вариации и модификации, которые могут быть предложены специалистами в данной области техники при чтении настоящего описания и которые не раскрыты в известных технических решениях. Например, несмотря на то что предпочтенные примеры реализации настоящего изобретения были описаны выше в связи с гидравлическим инструментом, предназначенным для работы в желудочно-кишечном тракте, очевидно, что эти технические решения могут быть модифицированы для использования также и в других полостях тела.
Изобретение относится к медицинской технике. Эндоскопическое устройство имеет дистальный конец, предназначенный для введения в тело пациента, и проксимальный конец, который удерживается вне тела пациента. Устройство содержит проксимальный цилиндр, расположенный вблизи проксимального конца эндоскопического устройства. Внутри проксимального цилиндра установлен с возможностью скольжения проксимальный поршень. Вблизи дистального конца эндоскопического устройства расположен дистальный цилиндр, а внутри дистального цилиндра установлен с возможностью скольжения дистальный поршень. Проксимальный и дистальный цилиндры соединены трубкой для текучей среды. Инструмент присоединен так, что приводится в действие при смещении дистального поршня и способен оказывать механическое воздействие на ткани тела или содержимое тела в ответ на смещение дистального поршня. Изобретение позволяет осуществлять перемещения без использования тросов или других элементов, оказывающих нежелательное воздействие на желудочно-кишечный тракт и/или создающих избыточные силы трения во время процедуры. 3 н. и 15 з.п. ф-лы, 6 ил.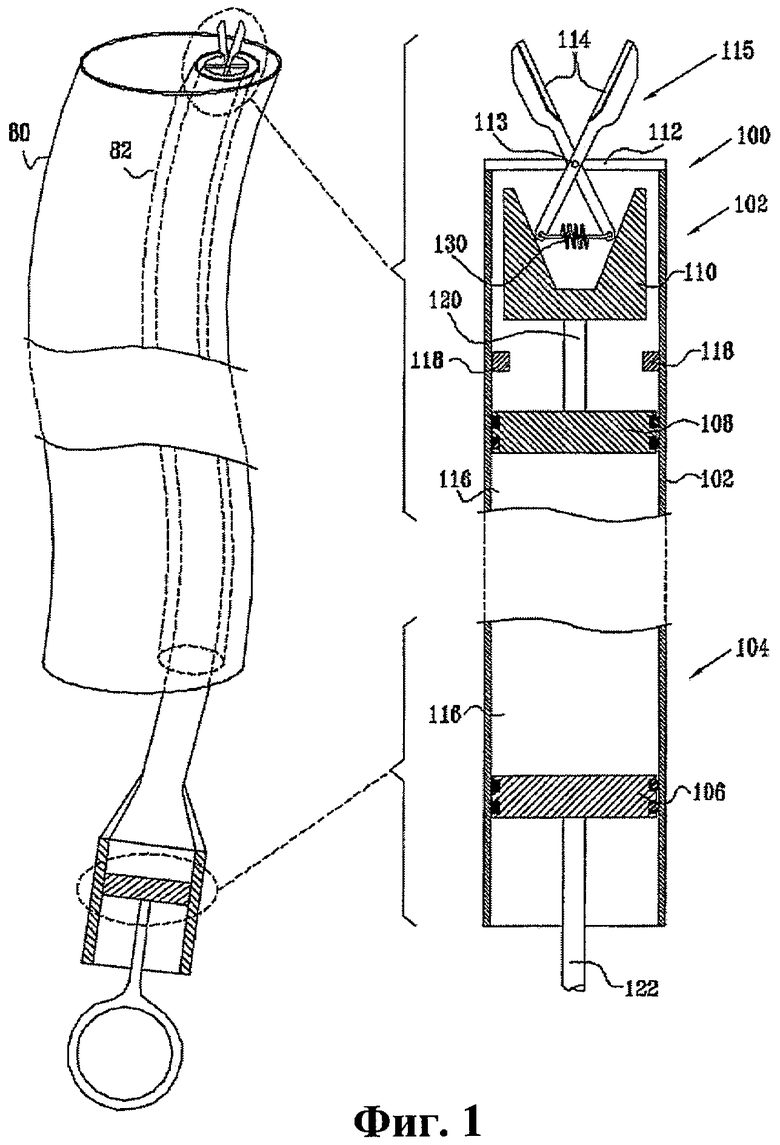
| US 5626607 А, 06.05.1997 | |||
| US 4655673 А, 07.04.1987 | |||
| US 4444462 А, 24.04.1984 | |||
| US 5372124 А, 13.12.1994 | |||
| ФЕДОРОВ И.В | |||
| и др | |||
| Эндоскопическая хирургия | |||
| - М.: Гэотар Медицина, 1998, с.42-43. |

