Изобретение относится к вибрационной технике и может быть использовано в различных отраслях хозяйственной деятельности.
Известен, А.С. СССР 1609515, В06В 1/16, способ возбуждения резонансных колебаний механических систем синхронным электродвигателем, заключающийся в подаче на электродвигатель электрического напряжения, в измерении колебаний механической системы, осуществлении сдвига фазы измеренного сигнала, его усилении и подаче на электродвигатель, при этом одновременно подают напряжение на фазную обмотку и обмотку возбуждения электродвигателя, изменяют амплитуду напряжения, подаваемого на обмотки, поворачивают статор до обеспечения условия возбуждения резонансных колебаний.
Известен, А.С. СССР 1726055, В06В 1/16, способ поддержания резонансных колебаний механической системы синхронным электродвигателем, заключающийся в подаче напряжения одновременно на фазную обмотку и обмотку возбуждения электродвигателя, измерении колебаний механической системы, осуществлении сдвига фаз измеренного сигнала, усилении его и подаче на электродвигатель, при этом изменяют амплитуду напряжения, подаваемого на электродвигатель, и поворачивают статор до обеспечения условий возбуждения резонансных колебаний, при измерении колебаний определяют ускорение колебаний механической системы, осуществляют сдвиг фазы измеренного сигнала на π/2, изменяют амплитуду напряжения, подаваемого на фазную обмотку, и поворачивают статор до совпадения движущего момента с моментом нагрузки, а на обмотку возбуждения подают постоянное напряжение.
Описанные аналоги имеют недостаток: резонансные колебания рабочего органа возбуждаются на упругой связи, жестко соединенной с основанием. Такая связь оказывает значительное динамическое воздействие на основание. Практически эти способы могут быть осуществлены только в случае применения массивного фундамента.
Известен, А.С. СССР 1269854, В06В 1/14, способ возбуждения колебаний заданной частоты в вибрационной резонансной системе с двумя степенями свободы, заключающийся в том, что на вибрационную резонансную систему воздействуют возмущающей силой, при этом для вибрационных систем с упругими элементами, имеющими билинейную характеристику с изломом в положении статического равновесия, частоту возмущающей силы ν выбирают близкой к сумме двух собственных частот ω1 и ω2 колебательной системы, которые определяют по соответствующей формуле.
Недостатком способа является необходимость применения уравновешивающей массы, которая, как правило, имеет величину того же порядка, что и масса рабочего органа. Это приводит к значительному увеличению металлоемкости и усложнению конструкции устройства для осуществления способа.
В качестве прототипов выбраны способ и устройство, описанные на стр.34-36 в книге: Элементарный учебник физики. Под ред. акад. Г.С.Ландсберга. Том III. Колебания, волны. Оптика. Строение атома. Изд. четвертое, исправленное. Изд-во "Наука". Главная редакция физико-математической лит-ры. М., 1966.
Колебательная система, включающая груз, висящий на пружине, свободным концом пружины присоединена к механизму, позволяющему при вращении рукоятки механизма сообщать присоединенному концу пружины принудительное периодическое перемещение. Это приводит к возбуждению вынужденных колебаний груза на пружине. При увеличении частоты вращения рукоятки амплитуда вынужденных колебаний возрастает и достигает максимального значения при совпадении периода принудительного периодического перемещения с собственным периодом колебательной системы, т.е. при резонансе.
Приведенное описание устройства и особенностей его работы позволяет сформулировать следующие существенные признаки осуществленного в нем способа возбуждения резонансных механических колебаний, а также существенные признаки устройства.
Существенные признаки способа в прототипе: резонансные колебания массы на упругой связи возбуждают путем принудительного периодического перемещения противоположного конца упругой связи, принудительное периодическое перемещение конца упругой связи осуществляют относительно основания по схеме жесткой кинематической связи, изменяют период принудительного периодического перемещения и настраивают резонансные колебания заданной амплитуды.
Существенные признаки устройства в прототипе: устройство содержит массу, соединенную с упругим элементом, противоположный конец которого присоединен к механизму принудительного периодического перемещения, механизм закреплен на основании и выполнен с возможностью изменения периода принудительного периодического перемещения.
Недостатком описанного способа и устройства является то, что резонансные колебания массы возбуждаются на упругой связи, которая присоединена к основанию. Такая связь, как и в случаях с описанными выше аналогами, оказывает значительное динамическое воздействие на основание, что требует применения массивного фундамента. Использование же упругой связи низкой жесткости, обеспечивающей виброизоляцию устройства от основания, неприемлемо в силу низкой частоты собственных колебаний системы и получения вследствие этого незначительного виброускорения, что неприемлемо по требованиям современных технологий, осуществляемых с применением вибрационной техники.
Кроме того, важным недостатком прототипов для способа и устройства является то, что при изменениях массы, которые могут происходить по технологическим причинам, резонансная настройка колебаний будет нарушаться по причине изменения периода собственных колебаний колебательной системы. Это требует постоянного наблюдения за процессом и периодической ручной подстройки периода принудительного периодического перемещения на период собственных колебаний. Важным недостатком является также то, что регулировка амплитуды резонансных колебаний осуществляется путем настройки на определенный период колебаний на резонансной кривой. Как показывают эксперименты, резонансные кривые для механических колебательных систем имеют островытянутый вид с узким диапазоном резонансных периодов колебаний. Это существенно затрудняет настройку контролируемого параметра (амплитуды или виброускорения) резонансных колебаний.
Задачей изобретения является возбуждение резонансных механических колебаний без применения уравновешивающей массы или фундамента при автоматическом поддержании заданного значения контролируемого параметра резонансных колебаний в случае технологического изменения колеблющейся массы с возможностью ручного плавного регулирования колебаний путем изменения амплитуды вынуждающей силы.
Решение задачи достигается тем, что в предлагаемом способе резонансные колебания массы на упругой связи возбуждают путем принудительного периодического перемещения противоположного конца упругой связи, изменяют период принудительного периодического перемещения конца упругой связи и настраивают резонансные колебания заданной амплитуды, причем принудительное периодическое перемещение концу упругой связи сообщают вынуждающей силой инерции, создаваемой электромагнитным вибратором, электромагнитный вибратор удерживают в пространстве виброизолирующей упругой связью с основанием и выдерживают соотношение
С>>Со,
где С - жесткость упругой связи;
Со - жесткость виброизолирующей упругой связи;
настраивают амплитуду вынуждающей силы инерции на заведомо меньшее значение, чем требуется при номинальном режиме резонансных колебаний массы, изменяют период вынуждающей силы инерции в области периода Тр и настраивают резонансные колебания массы на максимальное значение регулируемого параметра резонансных колебаний массы, период Тр определяют по формуле
где Тр - расчетный период резонансных колебаний массы в с;
С - жесткость упругой связи в Н/м;
m - максимальная величина колеблющейся массы в кг;
увеличивают амплитуду вынуждающей силы инерции до получения настроечного значения Хн регулируемого параметра резонансных колебаний массы, который выбирают по формуле
Xн=Хо+ΔХ,
где Хн - настроечное значение регулируемого параметра резонансных колебаний массы;
Хо - заданное по требованиям технологии применения вибрационной установки значение регулируемого параметра резонансных колебаний массы;
ΔХ - запас по величине регулируемого параметра резонансных колебаний массы, определяемый экспериментально для конкретной системы управления резонансными колебаниями массы;
задают Хо установкой опорного сигнала, управляющего регулируемым параметром резонансных колебаний путем изменения периода вынуждающей силы инерции, измеряют в автоматическом режиме колебания массы, сигнал измерения обрабатывают, сравнивают с опорным сигналом, задающим значение регулируемого параметра колебаний массы, полученный сигнал ошибки используют в качестве сигнала, управляющего периодом принудительного периодического перемещения конца упругой связи, поддерживающим заданное значение контролируемого параметра колебаний массы.
Поставленная задача решается также тем, что заявляемое устройство для возбуждения и поддержания резонансных механических колебаний содержит массу, соединенную с упругим элементом, противоположный конец которого присоединен к механизму принудительного периодического перемещения, механизм выполнен с возможностью изменения периода принудительного периодического перемещения, причем в качестве механизма принудительного периодического применен электромагнитный вибратор с блоком управления, соединенный с основанием через виброизолирующую упругую подвеску, упругий элемент выполнен с жесткостью, определяемой по формуле

где С - жесткость упругого элемента в Н/м;
m - колеблющаяся масса в кг;
T - период резонансных колебаний массы в с;
виброизолирующая упругая подвеска выполнена с жесткостью Со, связанной с жесткостью упругого элемента соотношением Со<<C, датчик колебаний, прикрепленный к массе, выход которого соединен с блоком управления, при этом блок управления выполнен с возможностью автоматического поддержания заданного значения контролируемого параметра колебаний массы путем изменения периода вынуждающей силы, создаваемой электромагнитным вибратором, а также с возможностью ручного регулирования резонансных колебаний массы путем изменения амплитуды вынуждающей силы инерции, создаваемой электромагнитным вибратором.
Применение предложенных совокупностей существенных признаков позволяет получить новый технический результат: возбуждать резонансные механические колебания без применения уравновешивающей массы или фундамента при автоматическом поддержании заданного значения контролируемого параметра резонансных колебаний в случае технологического изменения колеблющейся массы с возможностью ручного плавного регулирования колебаний путем изменения амплитуды вынуждающей силы.
Анализ уровня техники в области вибрационной техники показал, что предложенные в способе и устройстве для его осуществления совокупности существенных признаков являются новыми, явным образом не следуют из уровня техники, и, таким образом, предлагаемое изобретение является новым и имеет изобретательский уровень.
Сущность изобретения поясняется чертежом, на котором показана принципиальная схема устройства для осуществления способа возбуждения и поддержания резонансных механических колебаний. Устройство содержит массу 1, которая через упругий элемент 2 соединена с электромагнитным вибратором 3. Электромагнитный вибратор получает питание от блока управления 4. Через виброизолирующую подвеску 5 электромагнитный вибратор соединен с основанием 6. К массе прикреплен датчик колебаний 7, выход которого соединен с блоком управления.
Устройство работает следующим образом. Электромагнитный вибратор 3 создает вынуждающую силу инерции, под действием которой прикрепленный к нему конец упругого элемента 2 совершает принудительное периодическое перемещение. Благодаря этому возбуждаются через упругий элемент 2 вынужденные колебания массы 1. Поскольку жесткость упругого элемента 2 существенно превышает жесткость виброизолирующей упругой подвески 5, амплитуда принудительного периодического перемещения электромагнитного вибратора 3 и связанного с ним конца упругого элемента 2 будет зависеть практически от массы якоря электромагнитного вибратора (работающего в зарезонансном режиме собственной колебательной системы), массы статора вибратора, жесткости упругого элемента 2 и массы 1, а также от периода и амплитуды тока питания. С помощью блока управления 4 настраивают амплитуду вынуждающей силы инерции на заведомо меньшее значение, чем требуется при номинальном режиме резонансных колебаний массы, изменяют период вынуждающей силы инерции в области периода и настраивают резонансные колебания на максимальное значение регулируемого параметра резонансных колебаний массы. Увеличивают амплитуду вынуждающей силы инерции до получения настроечного значения Xн регулируемого параметра резонансных колебаний массы. Изменяют опорный сигнал, управляющий регулируемым параметром резонансных колебаний через изменение периода вынуждающей силы инерции, и настраивают на получение резонансных колебаний с заданным значением Хо регулируемого параметра. Переводят блок управления в режим автоматического поддержания заданных колебаний массы. Блок управления обрабатывает сигнал датчика колебаний 7, прикрепленного к массе 1, и выдает управляющий сигнал по поддержанию заданного значения регулируемого параметра резонансных колебаний путем соответствующего изменения периода вынуждающей силы инерции, создаваемой электромагнитным вибратором.
Способ возбуждения и поддержания резонансных механических колебаний осуществляют следующим образом.
Чтобы возбудить резонансные колебания массы на связанной с ней упругой связи без присоединения противоположного конца упругой связи к основанию (или уравновешивающей массе) при поддержании заданного значения контролируемого параметра резонансных колебаний в случае технологического изменения колеблющейся массы с возможностью ручного плавного регулирования колебаний, необходимо выполнить следующие условия.
Первое условие: необходимо применить источник возмущающей силы, способный создавать периодическую вынуждающую силу без опоры на основание или уравновешивающую массу. Это условие может быть выполнено только при использовании источника возмущающей силы инерционной природы. Как известно, силы инерции обусловлены не взаимодействием тел, а свойствами самих неинерциальных систем отсчета (см. стр.48-52 в книге: Иродов И.Е. Основные законы механики: Учебн. Пособие для вузов. - 2-е изд., перераб. - М.: Высшая школа, 1978. - 240 с., ил.). Очевидно, что при использовании электромагнитного вибратора указанное выше условие будет выполнено.
Второе условие: необходимо электромагнитный вибратор удерживать в пространстве на упругой связи, которая бы обеспечила "динамическую автономность" колебательной системы "масса - упругий элемент - электромагнитный вибратор". Выполнение этого условия создает два преимущества. Во-первых, позволит получить колебательную систему с высокой частотой квазисвободных колебаний и, следовательно, с высокой частотой резонансных колебаний. Во-вторых, позволит уменьшить до допустимого значения величину динамического воздействия колебательной системы на основание. Очевидно, что условие может быть выполнено, если электромагнитный вибратор удерживать в пространстве на виброизолирующей упругой связи с основанием, отличительной особенностью которой является низкая жесткость (см. стр.102 и 178 в книге: Ивович В.А., Онищенко В.Я. Защита от вибрации в машиностроении. - М.: Машиностроение, 1990. - 272 с., ил.).
Удержание электромагнитного вибратора 3 в пространстве виброизолирующей упругой связью с основанием 6 и его воздействие на упругую связь (соединенную противоположным концом с массой 1) создает эффект динамической псевдоопоры. Иначе говоря, электромагнитный вибратор будет выполнять функции не только устройства, сообщающего прикрепленному к нему концу упругой связи принудительное периодическое перемещение, но и функцию подвижной "опоры", относительно которой масса 1 будет совершать вынужденные (а в области периода Тр - резонансные) колебания.
Третье условие: необходимо ввести обратную связь путем измерения колебаний датчиком колебаний, обработки сигнала датчика колебаний, сравнения его с опорным сигналом, задающим требуемое значение контролируемого параметра колебаний, формирования управляющего сигнала по соответствующему изменению периода вынуждающей силы, создаваемой электромагнитным вибратором. Такая обратная связь в предлагаемом способе предусмотрена.
Четвертое условие: необходимо иметь источник вынуждающей силы инерции, который бы позволял осуществлять раздельное регулирование по периоду и амплитуде создаваемой им силы. Очевидно, что при использовании электромагнитного вибратора это условие будет выполнено.
Для осуществления способа выполняют следующие действия.
Массу 1 удерживают в пространстве на связанных с ней последовательно упругой связи в виде упругого элемента 2, электромагнитном вибраторе 3 и виброизолирующей упругой связи в виде виброизолирующей упругой подвески 5 с основанием 6. При этом соблюдают условие, чтобы жесткость С упругой связи и жесткость Со виброизолирующей упругой связи были связаны соотношением С>>Со. Электромагнитным вибратором 3 создают принудительное периодическое перемещение связанного с ним конца упругой связи. Благодаря этому на противоположном конце упругой связи возникают вынужденные колебания массы 1. Настраивают амплитуду вынуждающей силы инерции на заведомо меньшее значение, чем требуется при номинальном режиме резонансных колебаний массы, изменяют период вынуждающей силы инерции в области периода Тр и настраивают резонансные колебания на максимальное значение регулируемого параметра резонансных колебаний массы. Увеличивают амплитуду вынуждающей силы инерции до получения настроечного значения Хн регулируемого параметра резонансных колебаний массы. Изменяют опорный сигнал, управляющий регулируемым параметром резонансных колебаний через изменение периода вынуждающей силы инерции, и настраивают период вынуждающей силы инерции в области периода Tр на получение резонансных колебаний с заданным значением регулируемого параметра. Переводят блок управления в режим автоматического поддержания заданных колебаний массы. Измеряют резонансные колебания, сигнал измерения обрабатывают, сравнивают с опорным сигналом, задающим значение контролируемого параметра колебаний массы, полученный сигнал ошибки используют в качестве сигнала, управляющего периодом принудительного периодического перемещения конца упругой связи, поддерживающим заданное значение контролируемого параметра колебаний массы.
Предложенные способ и устройство в сравнении с прототипами имеют преимущество: позволяют возбуждать резонансные механические колебания без применения уравновешивающей массы или фундамента, автоматически поддерживать заданное значение контролируемого параметра резонансных колебаний в случае технологического изменения колеблющейся массы с возможностью ручного плавного регулирования колебаний путем изменения амплитуды вынуждающей силы.
Для проверки возможности практического осуществления способа и устройства была изготовлена по схеме устройства для реализации способа действующая модель. Модель имела следующие параметры: масса mB лабораторного электромагнитного вибратора, выполненного на базе электромагнита постоянного тока тягового реле автомобильного стартера, mB=1,2 кг; масса, имитирующая колеблющуюся массу, выбиралась по распространенному на практике соотношению m>10mВ, принято m=15 кг; соотношение жесткости С упругого элемента и жесткости Со виброизолирующей подвески выбиралось с учетом требований виброизоляции (см. стр.102 в книге: В.А.Ивович, В.Я.Онищенко. Защита от вибрации в машиностроении. - М.: Машиностроение, 1990), при этом для C=16,4·104 Н/м жесткость виброизолирующей подвески была выбрана равной Со=0,07·104 Н/м. В качестве датчика колебаний использовали датчик детонации, применяемый на современных автомобильных двигателях. Блок управления содержал схему обработки сигнала датчика, задающее устройство, сравнивающее устройство, сигнал которого управлял генератором импульсов постоянного тока, через который осуществляли питание электромагнитного лабораторного вибратора. Амплитуду питающего тока изменяли с помощью реостата, включенного в цепь питания вибратора.
По формуле определили, что для выбранных параметров период резонансных колебаний массы на упругом элементе относительно электромагнитного вибратора должен составлять 0,06 с.
Эксперименты показали, что по мере приближения к периоду 0,06 с амплитуда вынужденных колебаний массы заметно увеличивается и достигает максимального значения при периоде 0,06 с. Кроме того, эксперименты показали, что при изменении колеблющейся массы в пределах от -20% до +20% величина виброускорения колеблющейся массы изменялась в пределах от -5% до +5%, что приемлемо для технологий применения вибрационных установок. При этом изменение амплитуды вынуждающей силы инерции, создаваемой вибратором путем изменения амплитуды тока питания, обеспечивает плавное регулирование резонансных колебаний без нарушения режима резонанса.
Таким образом, предложенное изобретение промышленно применимо.
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях хозяйственной деятельности. Технический результат направлен на возбуждение резонансных механических колебаний без применения уравновешивающей массы или фундамента при автоматическом поддержании заданного значения контролируемого параметра резонансных колебаний в случае технологического изменения колеблющейся массы с возможностью ручного плавного регулирования колебаний путем изменения амплитуды вынуждающей силы. Способ возбуждения и поддержания резонансных механических колебаний заключается в том, что резонансные колебания массы на упругой связи возбуждают путем принудительного периодического перемещения противоположного конца упругой связи, изменяют период принудительного периодического перемещения конца упругой связи и настраивают резонансные колебания заданной амплитуды, причем принудительное периодическое перемещение концу упругой связи сообщают вынуждающей силой инерции, создаваемой электромагнитным вибратором, электромагнитный вибратор удерживают в пространстве виброизолирующей упругой связью с основанием. Описанный способ реализован при помощи соответствующего устройства. 2 н.п. ф-лы, 1 ил.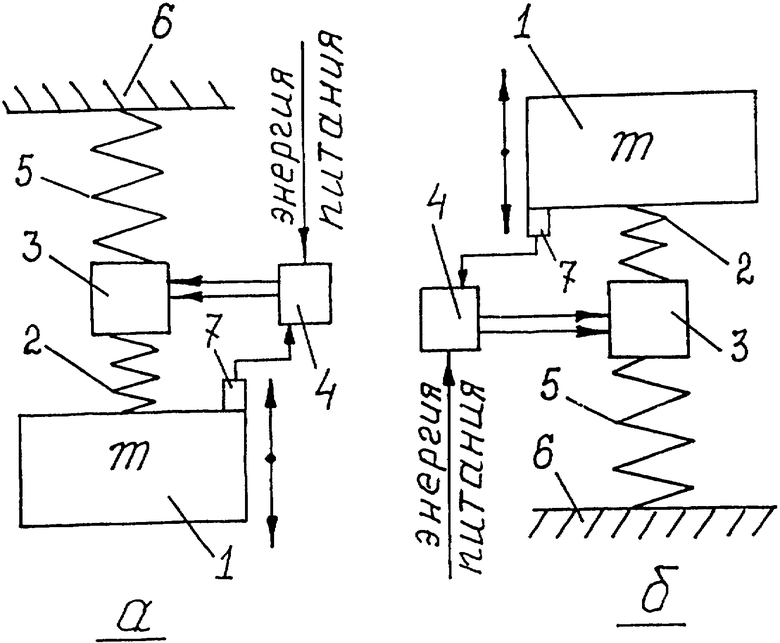
С>>Со,
где С - жесткость упругой связи;
Со - жесткость виброизолирующей упругой связи;
настраивают амплитуду вынуждающей силы инерции на заведомо меньшее значение, чем требуется при номинальном режиме резонансных колебаний массы, изменяют период вынуждающей силы инерции в области периода Тр и настраивают резонансные колебания массы на максимальное значение регулируемого параметра резонансных колебаний массы, период Тр определяют по формуле
где Тр - расчетный период резонансных колебаний массы, с;
С - жесткость упругой связи, Н/м;
m - максимальная величина колеблющейся массы, кг;
увеличивают амплитуду вынуждающей силы инерции до получения настроечного значения Хн регулируемого параметра резонансных колебаний массы, который выбирают по формуле
Хн=Хо+ΔХ,
где Хн - настроечное значение регулируемого параметра резонансных колебаний массы;
Хо - заданное по требованиям технологии применения вибрационной установки значение регулируемого параметра резонансных колебаний массы;
ΔХ - запас по величине регулируемого параметра резонансных колебаний массы, определяемый экспериментально для конкретной системы управления резонансными колебаниями массы;
задают Хо установкой опорного сигнала, управляющего регулируемым параметром резонансных колебаний путем изменения периода вынуждающей силы инерции, измеряют в автоматическом режиме колебания массы, сигнал измерения обрабатывают, сравнивают с опорным сигналом, задающим значение регулируемого параметра колебаний массы, полученный сигнал ошибки используют в качестве сигнала, управляющего периодом принудительного периодического перемещения конца упругой связи, поддерживающим заданное значение контролируемого параметра колебаний массы.
где С - жесткость упругого элемента, Н/м;
m - колеблющаяся масса, кг;
Т - период резонансных колебаний массы, с;
виброизолирующая упругая подвеска выполнена с жесткостью Со, связанной с жесткостью упругого элемента соотношением Со<<С, датчик колебаний, прикрепленный к массе, выход которого соединен с блоком управления, при этом блок управления выполнен с возможностью автоматического поддержания заданного значения контролируемого параметра колебаний массы путем изменения периода вынуждающей силы инерции, создаваемой электромагнитным вибратором, а также с возможностью ручного регулирования резонансных колебаний массы путем изменения амплитуды вынуждающей силы инерции, создаваемой электромагнитным вибратором.
| Способ возбуждения резонансных колебаний механических систем и устройство для его осуществления | 1988 |
|
SU1609515A1 |
| Способ поддержания резонансных колебаний механической системы и устройство для его осуществления | 1989 |
|
SU1726055A1 |
| Способ возбуждения колебаний | 1984 |
|
SU1269854A1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| Способ остановки вибровозбудителя,включающего ведомые и ведущие дебалансы,и устройство для его осуществления | 1985 |
|
SU1292846A1 |

