сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поддержания резонансных колебаний механической системы и устройство для его осуществления | 1989 |
|
SU1726055A1 |
| ВЫСОКОЧАСТОТНЫЙ ПНЕВМАТИЧЕСКИЙ ВОЗБУДИТЕЛЬ КОЛЕБАНИЙ ДЕТАЛЕЙ | 1973 |
|
SU408185A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Автоматический регулятор возбуждения для асинхронного электродвигателя с фазным ротором | 1980 |
|
SU928595A1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Устройство для бесконтактного тиристорного возбуждения синхронной электрической машины | 1981 |
|
SU1020953A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Устройство для возбуждения колебаний механических систем | 1982 |
|
SU1199298A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Электропривод переменного тока | 1985 |
|
SU1272460A1 |
Изобретение относится к вибрационной технике. Цель изобретения - снижение энергозатрат на возбуждение колебаний за счет обеспечения возможности стабилизации резонансных колебаний в процессе изменения параметров механической системы, колебания которой измеряют датчиком 6. Затем формирователем фазного напряжения (ФН) 9, сдвигая фазу сигнала датчика и усиливая его, преобразуют сигнал в фазное напряжение синхронного электродвигателя (СЭ) 1. Также формирователем напряжения возбуждения (НВ) 10 преобразуют сигнал датчика в постоянное НВ СЭ. В зависимости от амплитуды и частоты колебаний изменяют внутренний угол СЭ путем изменения амплитуды ФН и значения НВ и фазовый сдвиг так, чтобы их разность оставалась постоянной и соответствовала резонансному значению. 3 ил.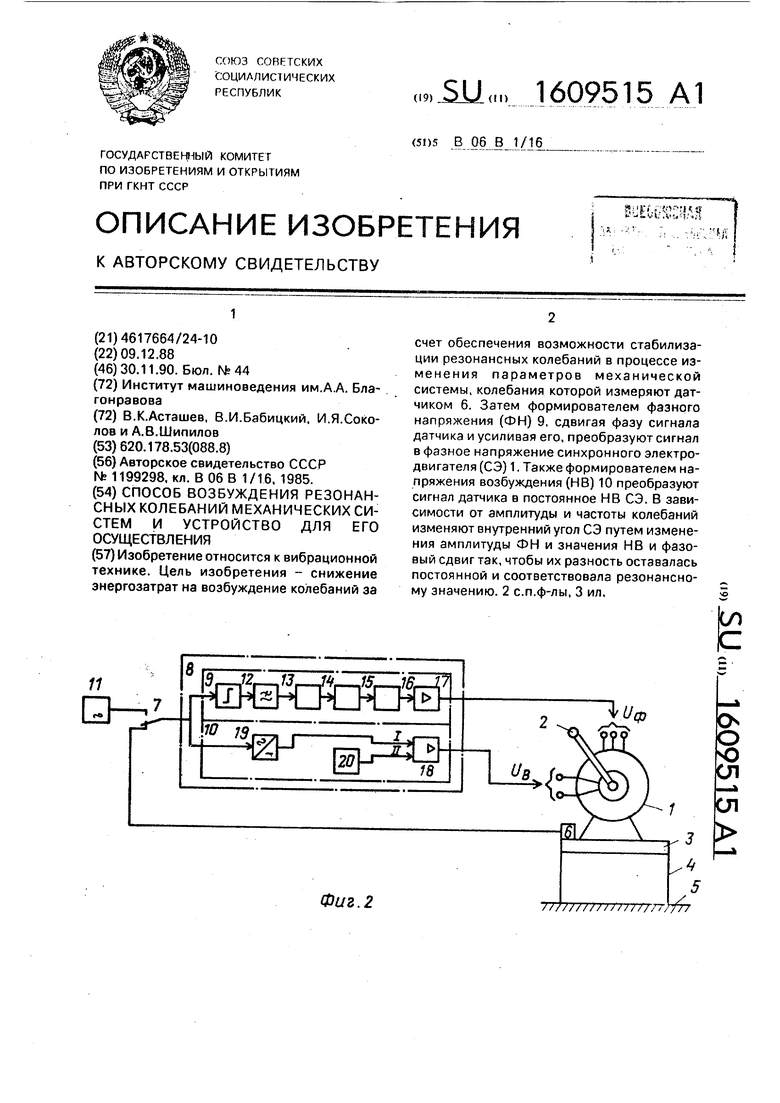
11
Фиг. 2
о о ю ел
ел
Изобретение относится к вибрационной технике и может быть использовано для возбуждения резонансных колебаний вибромашин с возбудителем колебаний, выполненным в виде синхронного электродвигателя, и поддержания их резонансного состояния при измении технологической нагрузки.
Цель изобретения - снижение знерго- затрат на возбуждение при обеспечении возможности стабилизации резонансных колебаний в процессе изменения параметров механической системы.
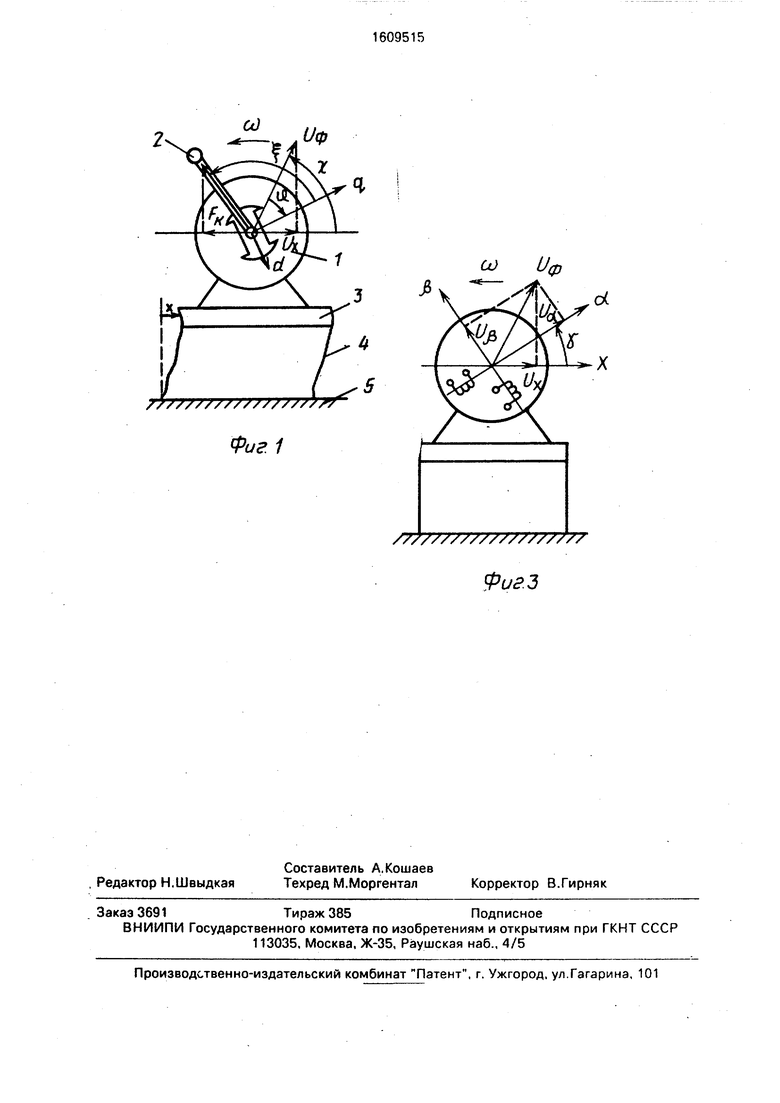
На фиг. 1 изображена схема, иллюстрирующая формирование возбуждающей силы; на фиг, 2 - устройство для возбуждения резонансных колебаний механических сие- тем; на фиг, 3 - схема, иллюстрирующая образование результирующего вектора фазного напряжения.
Устройство для возбуждения резонансных колебаний механических систем содержит возбудитель колебаний, выполненный в виде синхронного электродвигателя 1 с де- балансом 2, закрепленным на его оси. Механическая система состоит из платформы 3, связанной плоскими пружинами 4 с основанием 5, Механическая связь двигателя с механической системой осуществлена жестким закреплением статора двигателя 1 на платформе 3. Устройство содержит также электрическую цепь обратной связи, содержащую соединенные последовательно датчик 6 колебаний, переключатель 7 и блок управления 8 электродвигателем 1. Датчик 6 закреплен на платформе 3. С помощью переключателя 7 вход блока управления 8 подключен к датчику б или к генератору синусоидального напряжения 11. Блок управления 8 содержит формирователь фазного напряжения 9 и формирователя напряжения возбуждения 10, входы которых объединены, а выходы подключены соответственно к фаЗной обмотке и обмотке возбуждения синхронного электродвигателя 1. Таким образом, цепь обратной связи состоит из двух контуров. Лервый контур содержит формирователь фазного напряжения 9. Второй контур содержит формирователь напряжения возбуждения 10. Датчик 6 и переключатель 7 являются общими для обоих контуров. Формирователь фазного напряжения предназначен для преобразования синусоидального входного сигнала в синусоидальное фазное напряжение. При этом частота фазного напряжения равна частоте входного сигнала, а амплитуда фазного напряжения и вносимый блоком фазовый сдвиг зависят от амплитуды и частоты сигнала. Формирователь напряжения возбуждения предназначен для преобразования
синусоидального входного сигнала в постоянное напряжение возбуждения, величина которого зависит от частоты и амплитуды сигнала.
Формирователь фазного напряжения 9
(фиг. 2) состоит из последовательно соединенных релейного элемента 12, фильтра низких частот 13, двух дефференцирующих звеньев 14,15 фазовращателя 16, усилителя
переменного напряжения 17. На выходе формирователя напряжения возбужения 10 стоит суммирующий усилитель 18, первый вход которого соединен с входом формирователя через выпрямитель 19, а второй вход
5 соединен с источником постоянного напряжения 20. Датчик колебаний выполнен в виде датчика скорости.
Релейный элемент 12 имеет симметричную характеристику, его выходное напряже0 ние Увых связано с входным UBX соотношением Увых BpSignUex, где Вр - параметр релейного элемента,- sign х 1 при х О, sign X -1 при х О . Релейный элемент может быть выполнен, например.
5 в виде усилителя-ограничителя с большим коэффициентом усиления. Последовательно включенные релейный элемент 12 и фильтр низких частот 13 преобразуют синусоидальный сигнал с произвольной ампли0 тудой в синусоидальный же сигнал той же
4 частоты с заданной амплитудой В Вр. ,
Выпрямитель 10 преобразует синусоидальное входное напряжение UBX а sintwt в
5 постоянное выходное Увых Ква, где KB - параметр выпрямителя.
Далее везде рассматривается двуфаз- ный синхронный электродвигатель с обмоткой возбуждения, выполненной на роторе, и
0 с фазной обмоткой, выполненной на статоре.
Устройство работает следующим образом.
Переключателем 7 вход блока управле5 ния 8 подключают к генератору синусоидального напряжения 11. При этом на элекродвигатбль 1 поступает переменное фазное напряжение с частотой О) , задаваемой генератором 11, и постоянное напряже0 ние возбуждения. Ротор электродвигателя вращается с частотой (У , возбуждая колебания механической системы. Частоту о) сигнала генератора 11 изменяют таким образом, чтобы колебания механической си55 стемы стали резонансными. Переключателем 7 подключают вход блока управления 8 к датчику колебаний 6. Далее устройство поддерживает резонансные колебания автоматически. Происходит это следующим образом.
При колебаниях платформы 3 по закону X-Acoswt сигнал датчика скорости соя.
/ -Vo у - л., (б) где Vo - номинальный внутренний угол синхронного электродвигателя (обычно принимают Vo - 20-30°).
5Параметры В релейного элемента 12.KB
выпрямителя 19, значение напряженияи о Ui (ft;t-b3) . Здесь учтено, источника 20, коэффициенты усилений Ку
усилителя 17 и Ki, Км суммирующего усилителя 22 по входам I и И соответственно по- 10 добраны таким образом, что выполняются соотношения
ставляет и Кд AUJCOS ( +) . где Кд
-параметр датчика, а сигнал на выходе дифференцирующегозвена15
что каждое из дифференцирующих звеньев 14,15 вносит фазовый сдвиг -п. Фазовращатель 16 и усилитель 17 преобразуют сигнал в двухфазную систему напряжений (фиг. 3)
UL (ft)t )и и/9
ифсо5(йл+3 J-fV + f ).
подаваемых на взаимно перпендикулярные катушки а и /3 фазной обмотки. Здесь амплитуда фазного напряжения (1)
где - параметр фазовращателя 16;
Ку - коэффициент усиления усилителя , Проекция Ux изображающего вектора Уф фазного напряжения на направление перемещения X механической системы опережает пофазе напряжение Da на угол у между осью спи направлением перемещения
x:Ux UOcos( + 7) ифсо8(йл+)
где у) 3 2 -Ь V + У
Напряжение возбуждения на выходе суммирующего усилителя 22
UB К| KB Кд Au,-f- KII Uo . (3) Движущий момент синхронного электродвигателя
MflB ;/i sinU-i-/i2 sin2V, (4)
, - параметры двигателя. Внутренний угол V определяется из условия, равенства движущего момента Мдвмо- менту нагрузки Мн, который при резонансных колебаниях зависит от амплитуды и частоты колебаний
Cf;-l-i 2m гй7-f 2-т г АЙ; , (5)
где VI , vг- параметры возбудителя колебаний;
m - масса дебаланса;
г - расстояние центра тяжести от оси вращения.
Первое слагаемое описывает вязкое сопротивление, второе - трение качения либо сухое трение в подшипниках дебаланса, третье - вибрационный момент.
Фазовый сдвиг, задаваемый фазовращателем 16, постоянен
КуВ W 4 ,«2 sin2Vo
15
КуВ Км Uo v
Ку В KB К| - -п
jLit sin2 Vo m г
(7)
Кд sin Vo Определяя внутренний угол V из условия д Мн с учетом выражений (4), (5), (1), (3), (7), 20 получаем V Vo, т.е. при любых значениях амплитуды А и частоты (о резонансных колебаний внутренний угол остается постоянным, причем в соответствии с выражениями (2)
25 Ъг
,/, V Ч- Vo -у - л: 4:) - -Vo fСпособ возбужения резонансных коле- 30 баний механических систем с возбудителем, выполненным в виде синхронного электродвигателя, осуществляют следующим образом.
Измеряют колебания механической си- 35 стемы датчиком колебаний, например акселерометром. Фазу сигнала датчика сдвигают, сигнал усиливают и подацэт в качестве переменного фазного напряжения на электродвигатель. При этом изображаю- 40 щий вектор Urp фазного напряжения вращается с частотой О) колебаний механической системы. Ротор электродвигателя вращается также с частотой а) , попе- речная ось q ротора отстает от изображающего вектора J(p на внутренний угол V (фиг. 1).
Сдвиг фаз между силой, создаваемой возбудителем, и перемещением механической системы зависит от разности 1р- U , где - сдвиг фаз между проекциейих изображающего вектора вектора U® на направлении перемещения х механической системы и собственно перемещением. Реjtзонансному значению TJ сдвига фаз между
силой и перемещением соответствует постоянное значение разности / U Ф,, определяемое конструкций возбудителя.
КуВ W 4 ,«2 sin2Vo
5
КуВ Км Uo v
Ку В KB К| - -п
jLit sin2 Vo m г
(7)
Кд sin Vo Определяя внутренний угол V из условия д Мн с учетом выражений (4), (5), (1), (3), (7), 0 получаем V Vo, т.е. при любых значениях амплитуды А и частоты (о резонансных колебаний внутренний угол остается постоянным, причем в соответствии с выражениями (2)
5 Ъг
,/, V Ч- Vo -у - л: 4:) - -Vo fСпособ возбужения резонансных коле- 0 баний механических систем с возбудителем, выполненным в виде синхронного электродвигателя, осуществляют следующим образом.
Измеряют колебания механической си- 5 стемы датчиком колебаний, например акселерометром. Фазу сигнала датчика сдвигают, сигнал усиливают и подацэт в качестве переменного фазного напряжения на электродвигатель. При этом изображаю- 0 щий вектор Urp фазного напряжения вращается с частотой О) колебаний механической системы. Ротор электродвигателя вращается также с частотой а) , попе- речная ось q ротора отстает от изображающего вектора J(p на внутренний угол V (фиг. 1).
Сдвиг фаз между силой, создаваемой возбудителем, и перемещением механической системы зависит от разности 1р- U , где - сдвиг фаз между проекциейих изображающего вектора вектора U® на направлении перемещения х механической системы и собственно перемещением. Реjtзонансному значению TJ сдвига фаз между
силой и перемещением соответствует постоянное значение разности / U Ф,, определяемое конструкций возбудителя.
Сдвиг фаз ф зависит от сдгаига фазы сигнала датчика и от ориентации статора электродвигателя, Сдвиг фазы сигнала датчика осуществляется фазовращателем. Внутренний угол V зависит от амплиту- ды иф фазного напряжения, значения UB напряжения возбуждения и от нагрузки на валу двигателя.
Изменением амплитуды иф фазного напряжения и значения UB напряжения воз- буждения регулируют величину внутреннего угла V, Поворотом статора или изменением сдвига фазы сигнала датчика путем управления фазовращателем ре17ли- руют сдаиг фаз . Регулирование и до обеспечения постоянного значения Ф их- разности - и , соответствующему резонансу.
При изменении параметров механической системы изменяются амплитуда и час- тота резонансных колебаний. При этом изменяется внутренний угол V вследствие изменения нагрузки на валу электродвигателя, Регулированием vctp обеспечивают поддержание постоянного значения разности t/ - и Ф и, следовательно, поддерживание резонансных колебаний.
Формула изобретения 1. Способ возбуждения резонансных колебаний механических систем синхронным электродвигателем, заключающийся в подаче на электродвигатель электрического напряжения, в измерении колебаний механической системы, осуществлении сдвига фазы измеренного сигнала, его усилении и подаче на электродвигатель, отличающийся тем, что, с целью снижения энергозатрат на возбуждение и стабилизации резонансных колебаний, одновремен- но подают напряжение на фазную обмотку
5
Ю 5
5
и обмотку возбуждения электродвигателя, изменяют амплитуду напряжения, подаваемого на обмотки, поворачивают статор до обеспечения условия возбуждения резонансных колебаний,
игЗ
| Устройство для возбуждения колебаний механических систем | 1982 |
|
SU1199298A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
