Предлагаемые способ и устройство относятся к области радиоастрономии и могут быть использованы при решении широкого класса радиоастрономических задач, требующих высокого разрешения параметров, например, в радиоинтерферометрии со сверхдлинными базами, для сличения шкал времени, разнесенных на большие расстояния, в службе единого времени и частоты и т.п.
Известны способы синхронизации часов и устройства для их реализации (авт. свид. СССР №591799, 614416, 970300, 1180835, 1244632, 1278800; патенты РФ №2001423, 2003157, 2040035, 2177167; B.C.Губанов, A.M.Финкельштейн, П.А.Фридман. Введение в радиоастрономию. - М., 1983 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ синхронизации часов» (патент РФ №2003157, G04С 11/02, 1991), который и выбран в качестве прототипа.
Известный способ обеспечивает повышение точности и оперативности синхронизации часов, разнесенных на большие расстояния. Это достигается использованием дуплексного метода связи через геостационарный ИСЗ-ретранслятор. Поскольку точность измерений возрастает при увеличении базы радиоинтерферометра, приемные наземные пункты разнесены на значительное расстояние.
Недостатком известного способа является то, что разрешающая способность наземного радиоинтерферометра ограничена конечностью максимально возможной базы, равной диаметру Земли. Кроме того, известный способ синхронизации часов имеет ограниченные функциональные возможности, что обусловлено применением только двух наземных пунктов приема.
Технической задачей изобретения является расширение функциональных возможностей способа синхронизации часов и повышение разрешающей способности радиоинтерферометра путем использования нескольких наземных пунктов приема и одного подвижного пункта приема, размещенного на космическом объекте.
Поставленная задача решается тем, что способ синхронизации часов, основанный, в соответствии с ближайшим аналогом, на одновременном приеме разнесенными пунктами псевдошумовых СВЧ-сигналов с борта искусственного спутника Земли-ретранслятора, когерентном их преобразовании к видеочастоте, цифровой регистрации принятых сигналов и определении временной задержки прихода одного и того же сигнала в пункты синхронизации методом корреляционной обработки зарегистрированных сигналов, по величине которой производится сличение шкал времени, при этом в различные моменты времени по часам первого и второго пунктов приема с помощью одной и той же кодовой последовательности формируют псевдошумовые СВЧ-сигналы, регистрируют их на пунктах приема, преобразуют по частоте, усиливают по мощности, излучают усиленные сигналы в направлении на искусственный спутник Земли (ИСЗ)-ретранслятор, принимают бортовой аппаратурой ИСЗ-ретранслятора указанные сигналы и переизлучают их на первый и второй пункты приема с сохранением фазовых соотношений, отличается от ближайшего аналога тем, что используют n наземных пунктов приема и один подвижный пункт приема, размещенный на космическом объекте и образующий с каждым наземным пунктом приема n радиоинтерферометрических баз, принимают на каждом пункте сигналы глобальной навигационной спутниковой системы «НАВСТАР» (GPS), измеряют координаты местоположения, передают измеренные координаты местоположения космического пункта приема по каналам синхронизации на наземные пункты приема, сравнивают известные координаты местоположения наземных пунктов приема, полученные в результате прецизионной геодезической съемки, с измеренными, определяют дифференциальные поправки, передают их космический пункт приема по каналам синхронизации, вносят дифференциальные поправки в результаты собственных измерений и уточняют координаты местоположения космического пункта прием, причем на космическом пункте приема сигналы излучают на частоте ω1=ωпр1=ωг2, где ωпр1 - первая промежуточная частота, ωг2 - частота второго гетеродина, а принимают на частоте ω2=ωпр=ωг1, где ωпр - промежуточная частота, ωг1 - частота первого гетеродина, частоты первого и второго гетеродинов разносят на вторую промежуточную частоту ωпр2=ωг2-ωг1, принимают бортовой аппаратурой ИСЗ-ретранслятора сигналы на частотах ω1 и ω2 и переизлучают их на пункты приема на частотах ω1 и ω2 с сохранением фазовых соотношений.
Из известных устройств наиболее близким к предлагаемому является «Устройство синхронизации часов» (патент РФ №2001423, G04С 11/02, 1992), которое и выбрано в качестве прототипа.
Указанное устройство содержит геостационарный ИСЗ-ретранслятор и два наземных пункта приема, которые образуют радиоинтерферометр со сверхдлинной базой (РСДБ).
Недостатком известного устройства является то, что разрешающая способность наземного радиоинтерферометра ограничена конечностью максимально возможной базы, равной диаметру Земли. Кроме того, известное устройство синхронизации часов имеет ограниченные функциональные возможности, что обусловлено применением только двух наземных пунктов приема.
Технической задачей изобретения является расширение функциональных возможностей устройства синхронизации часов и повышение разрешающей способности радиоинтерферометра путем использования нескольких наземных пунктов приема и одного подвижного пункта приема, размещенного на космическом объекте.
Поставленная задача решается тем, что устройство синхронизации часов, содержащее, в соответствии с ближайшим аналогом, ИСЗ-ретранслятор, первый и второй наземные пункты приема, каждый из которых содержит последовательно включенные эталон времени и частоты, первый гетеродин, первый смеситель, второй вход которого через переключатель соединен с выходом генератора псевдошумового сигнала, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого через второй гетеродин соединен с первым выходом эталона времени и частоты, второй клиппер, второй вход которого соединен с вторым выходом эталона времени и частоты, второй блок памяти и коррелятор, выход которого является сигнальным выходом устройства, при этом к третьему выходу эталона времени и частоты последовательно подключены генератор псевдошумового сигнала, первый клиппер, второй вход которого соединен с вторым выходом эталона времени и частоты, и первый блок памяти, выход которого соединен с вторым входом коррелятора, отличается от ближайшего аналога тем, что оно снабжено n-2 наземными пунктами приема, подвижным пунктом приема, который размещен на космическом объекте и образует с наземными пунктами приема n радиоинтерферометрических баз, при этом каждый пункт приема снабжен перемножителем, полосовым фильтром, первым фазовым детектором, вычислительным блоком и приемником GPS-сигналов, причем к выходу усилителя второй промежуточной частоты последовательно подключены перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр, первый фазовый детектор, второй вход которого соединен с выходом второго гетеродина, и вычислительный блок, приемник GPS-сигналов, выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, третьего смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя промежуточной частоты и второго фазового детектора, второй вход которого соединен с выходом первого гетеродина, а выход подключен к второму входу вычислительного блока, генератор псевдошумового сигнала выполнен в виде последовательно подключенных к третьему выходу эталона времени и частоты генератора псевдослучайной последовательности, сумматора, второй вход которого через формирователь кода соединен с выходом вычислительного блока, и фазового манипулятора, второй вход которого соединен с выходом задающего генератора, а выход подключен к переключателю.
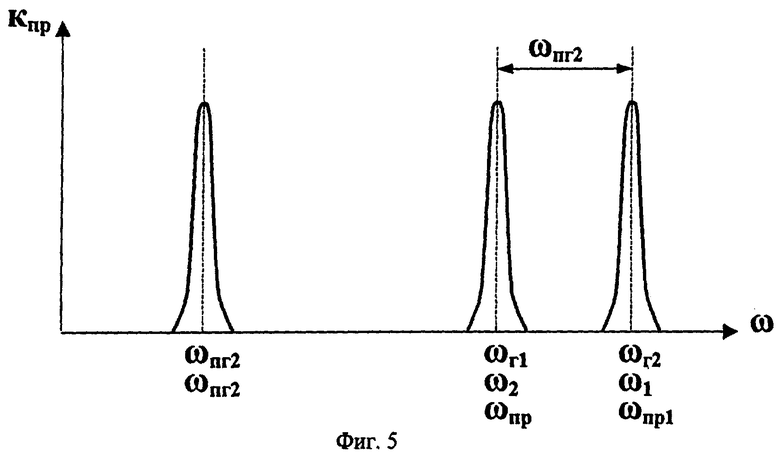
Геометрические схемы расположения наземных пунктов приема (НПП) В, С, Д, Е, ..., космического пункта приема (А), ИСЗ-ретранслятора S и навигационных ИСЗ глобальной навигационной спутниковой системы GPS изображены на фиг.1 и 2, где введены следующие обозначения: d1, d2, d3, d4 ... - базы радиоинтерферометров. Структурная схема космического пункта приема (КПП) представлена на фиг.3. Структурная схема наземных пунктов приема представлена на фиг.4. Частотная диаграмма, поясняющая процесс преобразования частоты синхронизирующего сигнала, изображена на фиг.5. Временная диаграмма дуплексного метода сличения часов показана на фиг.6.
Устройство синхронизации часов, реализующее предложенный способ, содержит геостационарный ИСЗ-ретранслятор S, навигационные ИСЗ (НИСЗ) глобальной навигационной спутниковой системы GPS, космический приемный пункт КПП, на котором размещен подвижный пункт А приема и n наземных пунктов приема В, С, Д, ....
Каждый пункт приема содержит последовательно включенные эталон 1(1.i) времени и частоты, первый гетеродин 2(2.i), первый смеситель 14(14.i), второй вход которого соединен с выходом генератора 4(4.i) псевдошумового сигнала, усилитель 15(15.i) первой промежуточной частоты, первый усилитель 16(16.i) мощности, дуплексер 17(17.i), вход-выход которого связан с приемопередающей антенной 18(18.i), второй усилитель 19(19.i) мощности, второй смеситель 20(20.i), второй вход которого через второй гетеродин 3(3.i) соединен с первым выходом эталона 1(1.i) времени и частоты, усилитель 21(21.i) второй промежуточной частоты, второй клиппер 22(22.i), второй вход которого соединен с вторым выходом эталона 1(1.i) времени и частоты, второй блок 23(23.i) памяти и коррелятор 12(12.i), выход которого является сигнальным выходом устройства. При этом к второму выходу генератора 4(4.i) псевдошумового сигнала последовательно подключены первый клиппер 10(10.i), второй вход которого соединен с вторым выходом эталона 1(1.i) времени и частоты, и первый блок 11(11.i) памяти, выход которого соединен с вторым входом коррелятора 12(12.i), к выходу усилителя 21(21.i) второй промежуточной частоты последовательно подключены перемножитель 24(24.i), второй вход которого соединен с выходом первого гетеродина 2(2.i), полосовой фильтр 25(25.i), первый фазовый детектор 26(26.i), второй вход которого соединен с выходом второго гетеродина 3(3.i), и вычислительный блок 32(32.i).
Приемник 33(33.i) GPS-сигналов выполнен в виде последовательно включенных приемной антенны 27(27.i), усилителя 28(28.i) высокой частоты, третьего смесителя 29(29.i), второй вход которого соединен с выходом второго гетеродина 3(3.i), усилителя 31(31.i), второй вход которого соединен с выходом первого гетеродина 2(2.i), а выход подключен к второму входу вычислительного блока 32(32.i).
Генератор 4(4.i) псевдошумового сигнала выполнен в виде последовательно подключенных к третьему входу эталона 1(1.i) времени и частоты генератора 5(5.i) псевдослучайной последовательности (ПСП), сумматора 7(7.i), второй вход которого через формирователь 6(6.i) кода соединен с выходом вычислительного блока 32(32.i), и фазового манипулятора 9(9.i), второй вход которого соединен с выходом задающего генератора 8(8.i), а выход подключен к переключателю 13(13.i) (i=1, 2, ..., n).
Устройство, реализующее предлагаемый способ синхронизации часов, работает следующим образом.
Для определения координат местоположения подвижного пункта А приема, размещенного на космическом объекте (КО), используются НИСЗ глобальной навигационной спутниковой системы GPS, предназначенных для передачи навигационных сигналов, которые могут приниматься во всех регионах мира. В состав системы GPS входят космический сегмент, состоящий из 24 ИСЗ, сеть наземных станций наблюдения за их работой и пользовательский сегмент (навигационные приемники GPS-сигналов).
Каждый GPS-спутник излучает сигналы на двух частотах (1.575 МГц и 12.275 МГц), в которых зашифрованы два кода. Один из них - код С/А доступен широкому кругу потребителей, в том числе и предлагаемому устройству синхронизации часов. Он позволяет получать лишь приблизительную оценку кода С/А, осуществляется на частоте ωс=1.575 МГц с использованием фазовой манипуляции высокочастотного колебания псевдослучайной последовательности длиной 1023 символа (элементарных посылок).
Другой код - Р обеспечивает более точное вычисление координат, но пользоваться им способны не все пользователи, доступ к нему ограничивается провайдером услуг GPS, поэтому используется сигнал Р-кода только военным ведомством США.
Сложный сигнал с фазовой манипуляцией (ФМ), излучаемый каждым GPS-спутником
uc(t)=Uc cos[ωct+ϕk(t)+ϕc], 0≤t≤Tc,
где ωс=1.575 МГц - несущая частота;
ϕk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕk(t)=const при kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (k=1, 2, ..., N);
τЭ, N - длительность и количество элементарных посылок (символов), из которых составлен сигнал длительностью Tc (Тс=Nτэ, N=1023);
улавливается антенной 27 приемника 33 GPS-сигналов и через усилитель 28 высокой частоты поступает на первый вход третьего смесителя 29, на второй вход которого подается напряжение второго гетеродина 3
uг2(t)=Uг2 cos(ωг2t+ϕг2).
На выходе смесителя 29 образуются напряжения комбинационных частот. Усилителем 30 выделяется напряжение промежуточной (разностной) частоты
uпр(t)=Uпр cos[ωпрt-ϕk(t)+ϕпр], 0≤t≤Tc,
где  ;
;
ωпр=ωг2-ωс - промежуточная (разностная) частота (фиг.4);
ϕпр=ϕС-ϕГ2,
которое поступает на первый (информационный) вход второго фазового детектора 31, на второй (опорный) вход которого подается напряжение первого гетеродина 2
uГ1(t)=UГ1 cos(ωГ1t+ϕГ1).
На выходе фазового детектора 31 образуется низкочастотное напряжение
uн(t)=Uнcosϕk(t), 0≤t≤Tc,
где  ,
,
которое поступает на второй вход вычислительного блока 32, где определяются координаты местоположения космического пункта приема.
Каждый приемник 33(33.i) GPS-сигналов попеременно используют два основных режима работы - приема информации и навигационный.
В навигационном режиме каждую секунду уточняется местоположение КО и выдаются основные навигационные данные. В режиме приема информации принимаемые данные эфемерид и поправок времени, необходимые для навигационного режима, и проводятся более редкие (через одну минуту) навигационные измерения.
Вычислительный блок 32(32.i) выполняет две функции: обслуживает приемник 33(33.i) GPS-сигналов и производят навигационные расчеты. Первая заключается в выборе рабочего созвездия спутников, вычислений данных целеуказания, хранений оценок кода и несущей, синхронизации по битам, кадрам и управлении работой приемника, например, переключении из режима приема информации в навигационный режим и обратно.
Вторая функция вычислительного блока 32(32.i) состоит в расчете эфемерид, определении координат местоположения КПП и выдачи координат местоположения КПП.
Приемник 33(33.i) GPS-сигналов работает в навигационном режиме до тех пор, пока геометрия расположения спутников остается удовлетворительной или пока не устарели эфемериды. Для определения трех координат места (широты, долготы и высоты) и времени необходимы измерения от трех спутников. В данном приемнике информация от четвертого «лишнего» спутника может оказаться необходимой во время различных ситуаций, когда возможно затенение сигналов одного или более спутников.
Стандартный приемник GPS-сигналов обеспечивает обнаружение спутника не более чем за 3...4 минуты с погрешностью определения координат местоположения КПП не более чем 100 м.
Для повышения точности определения координат местоположения КПП применяется метод дифференциальных поправок, который основан на использовании известного в радионавигации принципа дифференциальных навигационных измерений.
В момент времени  по часам космического объекта формируется псевдошумовой сигнал (сигнал α1). С этой целью напряжение высокой частоты
по часам космического объекта формируется псевдошумовой сигнал (сигнал α1). С этой целью напряжение высокой частоты
uс1(t)=Uс1cos(ωсt+ϕс1), 0≤t≤Tc1,
с выхода задающего генератора 8 поступает на первый вход фазового манипулятора 9.
Координаты местоположения КПП, рассчитанные с помощью вычислительного блока 32, с его выхода поступают на вход формирователя 6 кода, где формируется код местоположения КПП, состоящий из n1 элементарных посылок. Генератор 5 псевдошумовой последовательности формирует код, состоящий из m элементарных посылок, который используется для синхронизации часов. Указанные элементарные посылки суммируются в сумматоре 7 (N1=n1+m), образуя модулирующий код M1(t), который поступает на второй вход фазового манипулятора 9. В результате фазовой манипуляции на выходе фазового манипулятора 9 образуется псевдошумовой (фазоманипулируемый) (ФМ)-сигнал.
u1(t)=Uc1 cos[ωct+ϕk1(t)+ϕc1], 0≤t≤Tc1,
где ϕk1(t)={0, n} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t),
который поступает на первый вход первого смесителя 14, на второй вход которого подается напряжение uГ1(t) первого гетеродина 2, стабилизированного эталоном 1 времени и частоты. При этом переключатель 13 замкнут, а аналогичный переключатель 13.i (i=1, 2, ..., n) на наземных пунктах приема В, С, Д..., разомкнут.
На выходе смесителя 14 образуются напряжения комбинационных частот. Усилителем 15 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1 cos[ωпр1t+ϕk1(t)+ϕпр1(t)],
где  ;
;
ωпр1=ωc+ωг1=ω1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕc1+ϕг1.
Это напряжение после усиления в усилителе 16 мощности через дуплексер 17 поступает в приемопередающую антенну 18 и излучается ею в направлении ИСЗ-ретранслятора S на частоте ω1=ωпр1=ωГ2 (фиг.5). Вместе с тем этот же сигнал клиппируется в первом клиппере 10 и записывается в буферный блок 11 памяти. Работа клиппера 10 синхронизируется эталоном 1 времени и частоты.
Принятый бортовым приемником геостационарного ИСЗ-ретранслятора сигнал переизлучается на частотах ω1 и ω2 с сохранением фазовых соотношений. Диаграмма направленности бортовой антенны геостационарного ИСЗ-ретранслятора выбирается такой, чтобы переизлученный сигнал мог быть принят на пунктах приема. Принятый на космическом объекте ретранслированный ИСЗ-ретранслятором сигнал (сигнал α2) регистрируется блоком 23 памяти.
В тот же момент времени  по часам второго пункта В с помощью той же кодовой последовательности формируют такой же псевдошумовой СВЧ-сигнал (сигнал β1), регистрируют его на втором пункте В (сигнал β1 не отправляют на ретрансляцию, ключ 13.i разомкнут).
по часам второго пункта В с помощью той же кодовой последовательности формируют такой же псевдошумовой СВЧ-сигнал (сигнал β1), регистрируют его на втором пункте В (сигнал β1 не отправляют на ретрансляцию, ключ 13.i разомкнут).
Переизлученный сигнал улавливается приемопередающей антенной 18.i и через дуплексер 17.i и усилитель 19.i мощности поступает на первый вход смесителя 20.i. На второй вход смесителя 20.i подается напряжение uГ1(t) гетеродина 3.i наземного пункта приема. На выходе смесителя 20.i образуются напряжения комбинационных частот. Усилителем 21.i выделяется напряжение второй промежуточной (разностной) частоты
uпр2(t)=Uпр2cos[ωпр2t+ϕk1(t)+ϕпр2], 0≤t≤TС1.
где  ;
;
ωпр2=ωпр1+ωГ1 - вторая промежуточная (разностная) частота;
ϕпр2=ϕпр1-ϕг1,
которое клиппируется в клиппере 22.i тактовой частотой, затем регистрируется блоком 23.i памяти.
Это же напряжение поступает на первый вход перемножителя 24.i, на второй вход которого подается напряжение uГ2(t) гетеродина 2.i. На выходе перемножителя 24.i образуется напряжение
u2(t)=U2cos[ωпрt-ϕk(t)+ϕпр],
где  ;
;
ωпр=ωг2-ωпр2=ωг1 - напряжение промежуточной частоты;
ϕпр=ϕг2-ϕпр2=ϕг1,
которое представляет собой ФМн-сигнал на частоте ωг1 гетеродина 3.i. Это напряжение выделяется полосовым фильтром 25.i и поступает на первый (информационный) вход фазового детектора 26.i, на второй (опорный) вход которого подается напряжение ωг1 гетеродина 3.i. На выходе фазового детектора 26.i образуется низкочастотное напряжение
uн1(t)=Uн1 cosϕk1(t), 0≤t≤Tc1,
где  ;
;
пропорциональное модулирующему коду M1(t). Это напряжение поступает на первый вход вычислительного блока 32.i.
Сложный ФМн-сигнал
uc(t)=Uc cos[ωct+ϕk(t)+ϕc], 0≤t≤Tc,
излучаемый каждым GPS-спутником, улавливается антенной 27.i приемника 33.i GPS-сигналов и через усилитель 28.i высокой частоты поступает на первый вход третьего смесителя 29.i, на второй вход которого подается напряжение uГ1(t) второго гетеродина 3.i. На выходе смесителя 29.i образуются напряжения комбинационных частот. Усилителем 30 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1cos[ωпр1t+ϕk(t)+ϕпр1(t)], 0≤t≤Tc,
где  ;
;
ωпр1=ωc+ωГ1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕc+ϕг1.
которое поступает на первый (информационный) вход второго фазового детектора 31.i, на второй (опорный) вход которого подается напряжение uГ2(t) первого гетеродина 2.i. На выходе фазового детектора 31.i образуется низкочастотное напряжение
uн2(t)=Uн2cosϕk(t), 0≤t≤Tc,
где  ;
;
которое поступает на второй вход вычислительного блока 32.i, где определяются координаты местоположения пункта приема.
Дифференциальный режим реализуется с помощью контрольного приемника 33.i GPS-сигналов, установленного на наземном пункте приема В (С, Д, ...) с известными координатами, полученными в результате прецизионной геодезической съемки. Получив текущие координаты местоположения КО и сравнивая известные координаты с измеренными, вычислительный блок 32.i вырабатывает дифференциальные поправки.
В произвольный момент времени  по часам наземного пункта, например, В аналогично формируют псевдошумовой СВЧ-сигнал (сигнал β3). С этой целью напряжение высокой частоты
по часам наземного пункта, например, В аналогично формируют псевдошумовой СВЧ-сигнал (сигнал β3). С этой целью напряжение высокой частоты
uc2(t)=Uc2 cos(ωct+ϕc2), 0≤t≤Tc2
с выхода задающего генератора 8.i поступает на первый вход фазового манипулятора 9.i.
Дифференциальные поправки, рассчитанные вычислительным блоком 32.i, с его выхода поступают на вход формирователя 6.i кода, где формируется код дифференциальных поправок, состоящий из n2 элементарных посылок. Генератор 5.i ПСП формирует код, состоящий из m элементарных посылок, который используется для синхронизации часов. Указанные элементарные посылки суммируются в сумматоре 7.i (N2=n2+m), образуя модулирующий код М2(t), который поступает на второй вход фазового манипулятора 9.i. В результате фазовой манипуляции на выходе фазового манипулятора 9.i образуется ФМн-сигнал
u3(t)=Uc3 cos[ωct+ϕk2(t)+ϕc2], 0≤t≤Tc2,
где ϕk2(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M2(t),
который через замкнутый переключатель 13.i поступает на первый вход первого смесителя 14.i, на второй вход которого подается напряжение uг2(t) первого гетеродина 2.1, стабилизированного эталоном 1.i времени и частоты. При этом переключатель 13.i замкнут, а переключатель 13 на КО разомкнут.
На выходе смесителя 14.i образуются напряжения комбинационных частот. Усилителем 15.i выделяется напряжение промежуточной частоты
u4(t)=U4 cos[ωпрt-ϕk2(t)+ϕ4], 0≤t≤Tc2,
где  ;
;
ωпр=ωГ2-ωc=ω2 - промежуточная частота;
ϕ4=ϕг2-ϕс,
Это напряжение после усиления в усилителе 15.i мощности через дуплексер 17.i поступает в приемопередающую антенну 18.i, излучается ею в направлении ИСЗ-ретранслятора на частоте ω2, переизлучается последним, улавливается антенной 18 космического объекта и через дуплексер 17 и усилитель 19 мощности поступает на первый вход смесителя 20, на второй вход которого подается напряжение uГ2(t) гетеродина 3.
На выходе смесителя 20 образуются напряжения комбинационных частот. Усилителем 21 выделяется напряжение второй промежуточной (разностной) частоты
u5(t)=U4 cos[ωпр2t+ϕk2(t)+ϕ5], 0≤t≤Tc2,
где  ;
;
ωпр2=ωГ2-ω2 - вторая промежуточная (разностная) частота;
ϕ5=ϕг2-ϕ4,
которое клиппируется в клиппере 22 тактовой частотой эталона 1 времени и частоты, затем регистрируется блоком 23 памяти.
Это же напряжение поступает на первый вход перемножителя 24, на второй вход которого подается напряжение uГ1(t) гетеродина 2. На выходе перемножителя 24 образуется напряжение
u6(t)=U6 cos[ωпр1t+ϕk2(t)+ϕ6], 0≤t≤Tc2,
где  ;
;
ωпр1=ωпр2+ωГ1=ωГ2 - первая промежуточная (суммарная) частота;
ϕ6=ϕ5+ϕГ1,
которое представляет собой ФМн-сигнал на частоте ωГ2 гетеродина 3. Это напряжение выделяется полосовым фильтром 25 и поступает на первый (информационный) вход фазового детектора 26, на второй (опорный) вход которого подается напряжение uГ2(t) гетеродина 3. На выходе фазового детектора 26 образуется низкочастотное напряжение
uн3(t)=Uн3 cosϕk2(t), 0≤t≤Tc2,
где  ;
;
пропорциональное модулирующему коду M2(t). Это напряжение поступает на первый вход вычислительного блока 32. Полученные дифференциальные поправки вносятся в результаты собственных измерений космического объекта, тем самым уточняются координаты местоположения КПП.
Дифференциальный режим позволяет определить координаты КПП с точностью до 5 м.
Корреляционная обработка зарегистрированных сигналов в корреляторе 12(12.i) на каждом пункте позволяет определять следующие временные задержки:




и соответствующие им частоты интерференции Fi (i=1, 2, 3, 4), которые определяют производные этих задержек:
 ,
,  ,
,
где аj, bj (j=1, 2, 3) - время распространения сигнала между геостационарным ИС3-ретранслятором и пунктами А(КПП), В, С, ...;
tA, tB - время задержки сигналов в излучающей аппаратуре обоих пунктов;
τA, τB - время задержки сигналов в приемно-регистрирующей аппаратуре;
ΔS - время задержки сигналов бортовым ИСЗ-ретранслятором;
Δt - искомая разность показателей часов в один и тот же физический момент времени.
Таким образом, предлагаемые способ и устройство синхронизации часов по сравнению с прототипами обеспечивают повышение разрешающей способности радиоинтерферометра. Это достигается использованием нескольких наземных пунктов приема и одного подвижного пункта приема, размещенного на космическом объекте.
Кроме того, предлагаемые технические решения могут быть использованы при решении широкого класса радиоинтерферометрических задач, требующих высокого разрешения параметров наблюдаемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2006 |
|
RU2310221C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2012 |
|
RU2507555C2 |
| МОДЕМ СИГНАЛОВ ПЕРЕДАЧИ ВРЕМЕНИ ПО ДУПЛЕКСНОМУ КАНАЛУ СПУТНИКОВОЙ СВЯЗИ | 2016 |
|
RU2623718C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2005 |
|
RU2292574C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2528405C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2350998C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2670334C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2017 |
|
RU2654846C1 |




Изобретение относится к области средств связи и сигнализации и может быть использовано для сличения шкал времени, разнесенных на большие расстояния, а также может быть использовано при решении широкого класса радиоастрономических задач, требующих высокого разрешения параметров, например в радиоинтерферометрии со сверхдлинными базами, для сличения шкал времени, разнесенных на большие расстояния, в службе единого времени и эталонных частот и т.п. Изобретение направлено на расширение функциональных возможностей способа и устройства синхронизации часов и повышение разрешающей способности радиоинтерферометра путем использования нескольких наземных пунктов приема и одного подвижного пункта приема, размещенного на космическом объекте, что обеспечивается за счет того, что устройство, реализующее способ синхронизации часов, содержит геостационарный ИСЗ-ретранслятор, спутники глобальной навигационной спутниковой системы GPS, космический объект, на котором размещен подвижный пункт приема, и n наземных пунктов приема. Каждый пункт приема содержит эталон времени и частоты, первый гетеродин, второй гетеродин, генератор псевдошумового сигнала, генератор псевдослучайной последовательности, формирователь кода, сумматор, задающий генератор, фазовый манипулятор, первый клиппер, первый блок памяти, коррелятор, переключатель, первый смеситель, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, приемопередающую антенну, второй усилитель мощности, второй смеситель, усилитель второй промежуточной частоты, второй клиппер, второй блок памяти, перемножитель, полосовой фильтр, первый фазовый детектор, приемную антенну, усилитель высокой частоты, третий смеситель, усилитель промежуточной частоты, второй фазовый детектор, вычислительный блок и приемник GPS-сигналов. 2 н.п. ф-лы, 6 ил.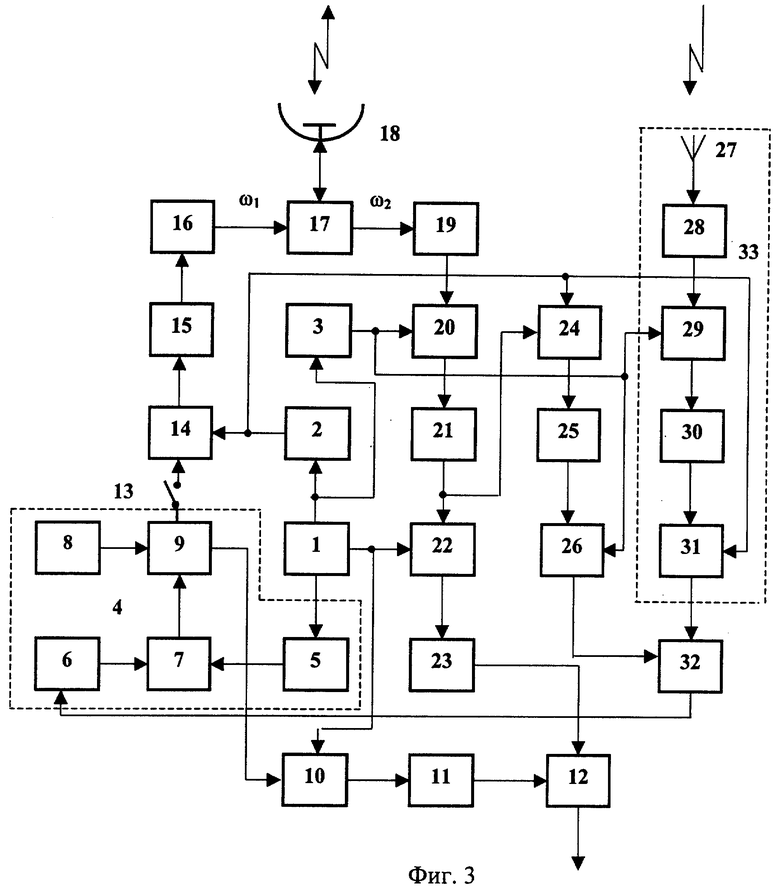
| RU 2003157 С1, 15.11.1993 | |||
| RU 2001423 C1, 15.10.1993 | |||
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2005 |
|
RU2292574C1 |
| US 5666330 A1, 09.09.1997 | |||
| DE 19801688 A, 22.07.1989. | |||

