Предлагаемое устройство относится к области средств связи и сигнализации и может быть использовано для сличения шкал времени, разнесенных на большое расстояние и размещенных на транспортных средствах и наземном пункте управления и контроля, и для дистанционного контроля технического состояния транспортного средства и его местонахождения на наземном пункте управления и контроля.
Известны способы синхронизации часов (авт. свид. СССР №№591.799, 614.416, 970.300, 1.180.835, 1.244.632, 1.278.800; патенты РФ №№2.001.423, 2.003.157, 2.040.035, 2.177.167; B.C.Губанов, А.М.Финкельштейн, П.А.Фридман. Введение в радиоастрономию. - М., 1983 и другие).
Из известных устройств наиболее близким к предлагаемому является "Устройство синхронизации часов" (патент РФ №2.001.423, G04С 11/02, 1992), которое и выбрано в качестве прототипа.
Указанное устройство обеспечивает сличение шкал времени, разнесенных на большое расстояние, и основано на использовании дуплексного метода связи через геостационарный ИСЗ-ретранслятор.
Основное достоинство дуплексного метода связи состоит в том, что в нем исключается длина трассы прохождения сигнала. Поэтому его точность в основном зависит от параметров бортового ретранслятора, типа используемого сигнала и техники измерения временных интервалов.
Известное устройство обеспечивает синхронизацию часов только между стационарными наземными пунктами, разнесенными на большое расстояние, с использованием геостационарного ИСЗ-ретранслятора.
Однако на практике в ряде случаев возникает задача дистанционного наблюдения из центра управления и контроля за поведением подвижного объекта, работой его систем и действиями экипажа, а также дистанционного контроля за техническим состоянием подвижного объекта и его местонахождением. При этом в качестве подвижных объектов могут быть космические, воздушные, водные и наземные транспортные средства.
Технической задачей изобретения является расширение функциональных возможностей устройства путем дистанционного управления и контроля за техническим состоянием подвижного объекта и его местонахождением в процессе передвижения.
Поставленная задача решается тем, что устройство синхронизации часов, содержащее ИСЗ-ретранслятор, первый и второй пункты, каждый из которых содержит последовательно включенные эталон частоты и времени, первый гетеродин, первый смеситель, первый усилитель промежуточной, первый усилитель мощности, дуплексер, вход-выход которого связан с приемо-передающей антенной, второй усилитель мощности, второй смеситель, второй вход которого через второй гетеродин соединен с первым выходом эталона частоты и времени, второй клиппер, второй вход которого соединен с четвертым выходом эталона частоты и времени, второй блок памяти и коррелятор, последовательно подключенные ко второму выходу эталона частоты и времени генератор псевдошумового сигнала, первый клиппер, второй вход которого соединен с третьим выходом эталона частоты и времени, и первый блок памяти, выход которого соединен с вторым входом коррелятора, снабжено на первом пункте элементом ИЛИ, двумя перемножителями, двумя полосовыми фильтрами, двумя фазовыми детекторами, бортовым контроллером, датчиками, бортовым регистратором, задающим генератором, фазовым манипулятором, приемной антенной, третьим усилителем мощности, третьим смесителем и третьим усилителем промежуточной частоты, причем к выходу второго усилителя промежуточной частоты последовательно подключены первый перемножитель, второй вход которого соединен с выходом второго гетеродина, первый полосовой фильтр, первый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, бортовой контроллер, второй вход которого соединен с выходом коррелятора, фазовый манипулятор, второй вход которого соединен с выходом задающего генератора, и элемент ИЛИ, второй вход которого через переключатель соединен со вторым выходом генератора псевдошумового сигнала, а выход подключен ко второму входу первого смесителя, к выходу приемной антенны последовательно подключены третий усилитель мощности, третий смеситель, второй вход которого соединен с выходом второго гетеродина, третий усилитель промежуточной частоты, второй перемножитель, второй вход которого соединен с выходом второго гетеродина, второй полосовой фильтр и второй фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к третьему входу бортового контроллера, выход датчиков подключен к бортовому регистратору и к четвертому входу бортового контроллера, на втором пункте элементом ИЛИ, перемножителем, полосовым фильтром, фазовым детектором, наземным контроллером, задающим генератором и фазовым манипулятором, причем к выходу второго усилителя промежуточной частоты последовательно подключены перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовым фильтром, фазовый детектор, второй вход которого соединен с выходом второго гетеродина, наземный контроллер, второй вход которого соединен с выходом коррелятора, фазовый манипулятор, второй вход которого соединен с выходом задающего генератора, и элемент ИЛИ, второй вход которого через переключатель соединен с вторым выходом генератора псевдошумового сигнала, а выход подключен ко второму входу первого смесителя, при этом первый пункт размещен на подвижном объекте, в качестве которого может быть выбрано космическое, воздушное, водное или наземное транспортное средство, а второй наземный пункт выбран в качестве центра управления и контроля.
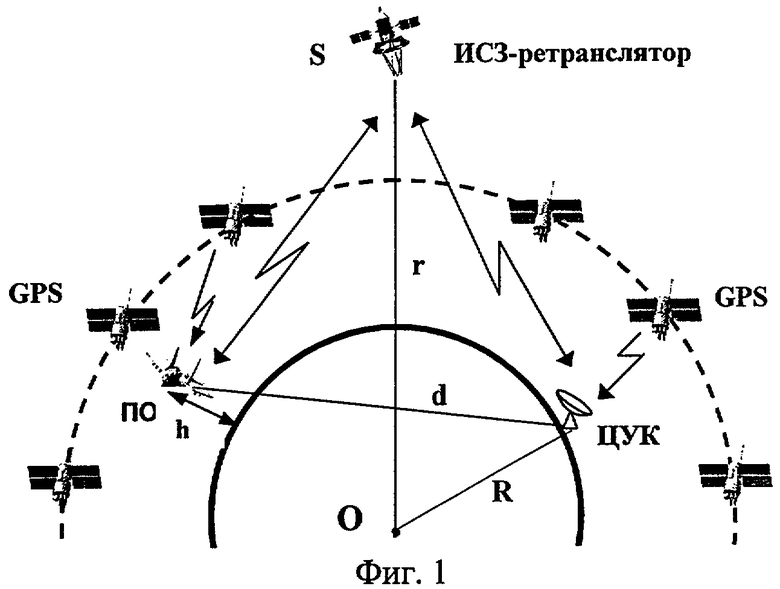
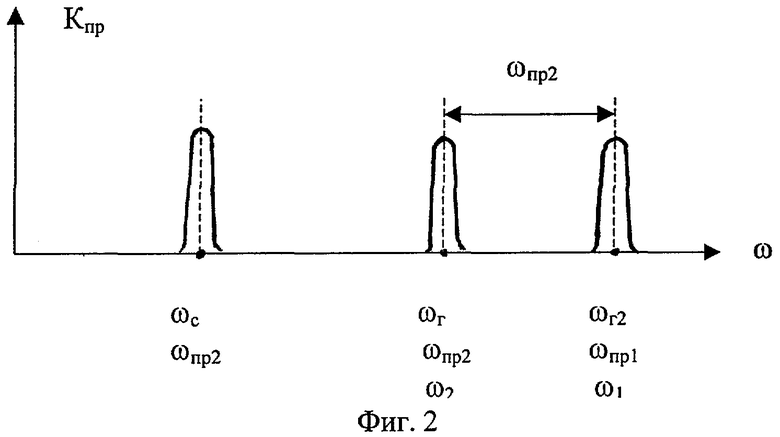
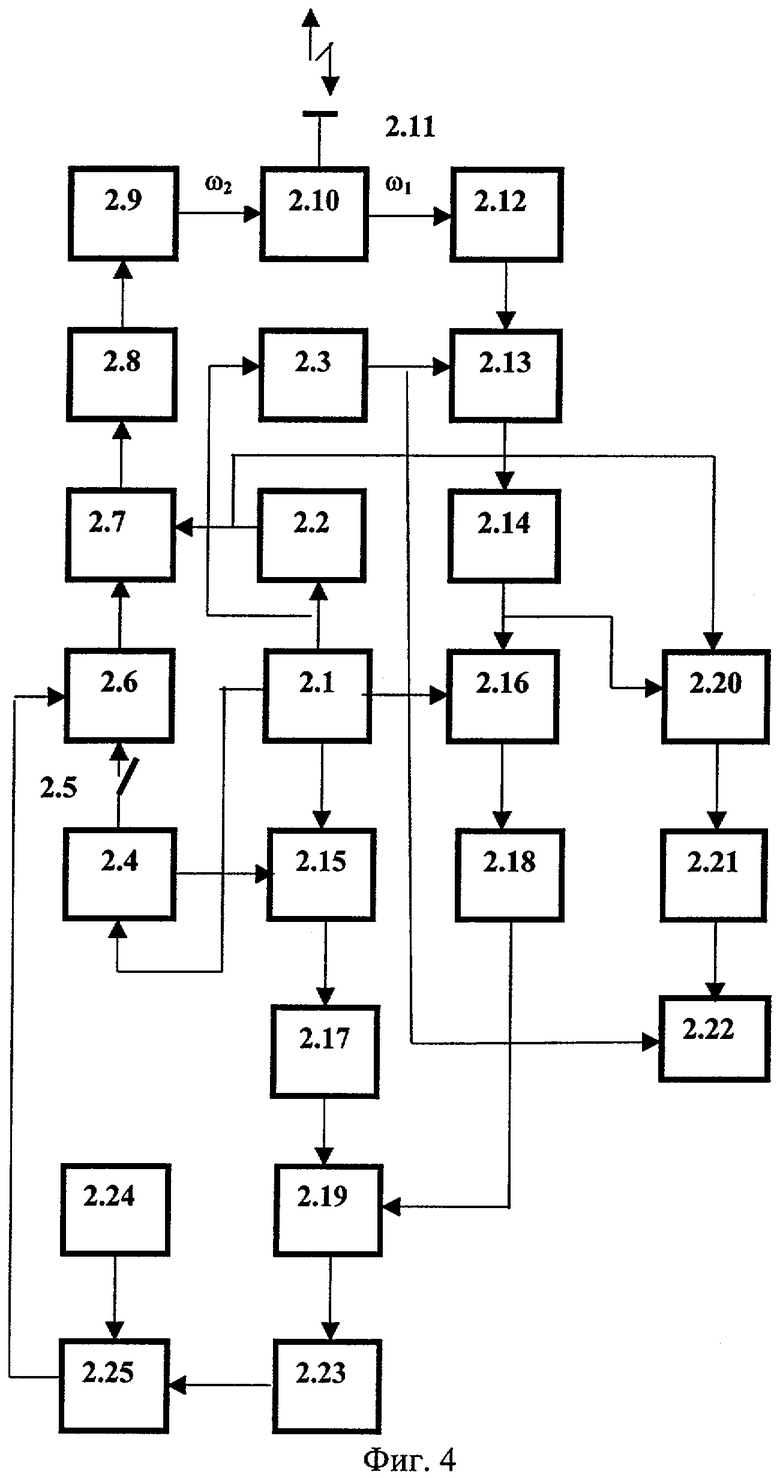
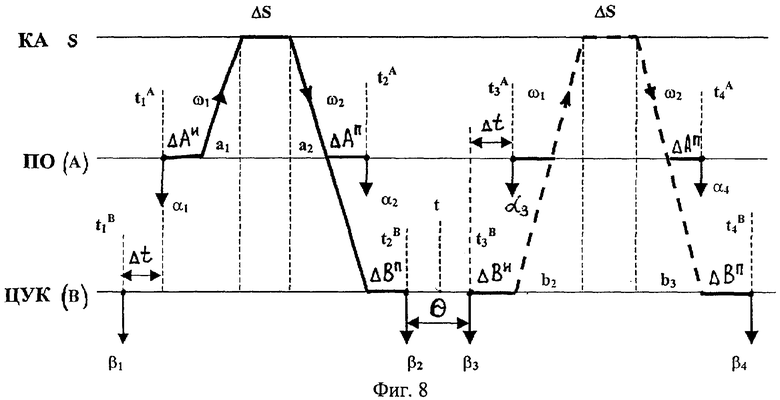
Геометрическая схема расположения подвижного объекта ПО, наземного центра управления и контроля ЦУК, спутников навигационной системы GPS и ИСЗ-ретранслятора S изображена на фиг.1, где введены следующие обозначения: О - центр массы Земли; d - база интерферометра; r - радиус-вектор ИСЗ-ретранслятора, размещенного на геостационарной орбите. Частотная диаграмма, поясняющая преобразование сигналов, изображена на фиг.2. Структурная схема наземного центра управления и контроля ЦУК представлена на фиг.3 и на фиг.4. Временные диаграммы, поясняющие работу подвижного объекта, наземного центра управления и контроля и приемника GPS-сигналов, изображены на фиг.5, 6 и 7. Временная диаграмма дуплексного метода сличения часов представлена на фиг.8, где введены следующие обозначения: S, А, В - шкала времени ИСЗ-ретранслятора, подвижного объекта ПО и наземного центра управления и контроля ЦУК соответственно.
Устройство синхронизации часов содержит ИС3-ретранслятор, первый и второй пункты, каждый из которых содержит последовательно включенные эталон 1.1(2.1) частоты и времени, первый гетеродин 1.2(2.2), первый смеситель 1.7(2.7), первый усилитель 1.8(2.8) промежуточной частоты, первый усилитель 1.9(2.9) мощности, дуплексер 1.10(2.10), вход-выход которого связан с приемопередающей антенной 1.11(2.11), второй усилитель 1.12(2.12) мощности, второй смеситель 1.13(2.13), второй вход которого соединен с выходом второго гетеродина 1.3(2.3), второй усилитель 1.14(2.14) промежуточной частоты, второй клиппер 1.16(2.16), второй вход которого соединен с четвертым выходом эталона 1.1(2.1) частоты и времени, второй блок памяти 1.18(2.18) и контроллер 1.19(2.19), последовательно подключенные ко второму выходу эталона 1.1(2.1) частоты и времени, генератор 1.4(2.4) псевдошумового сигнала, первый клиппер 1.15(2.15), второй вход которого соединен с третьим выходом эталона 1.1(2.1) частоты и времени, и первый блок 1.17(2.17) памяти, выход которого соединен со вторым входом коррелятора 1.19(2.19), последовательно подключенные к выходу второго усилителя 1.14(2.14) промежуточной частоты, первый перемножитель 1.20(2.20), второй вход которого соединен с выходом гетеродина 1.3(2.2), первый полосовой фильтр 1.21(2.21), фазовый детектор 1.22(2.22), второй вход которого соединен с выходом гетеродина 1.2(2.3), бортовой (наземный) контроллер 1.23(2.23), второй вход которого соединен с выходом коррелятора 1.19(2.19), фазовый манипулятор 1.25(2.25), второй вход которого соединен с выходом задающего генератора 1.24(2.24), и элемент ИЛИ 1.6(2.6), второй вход которого через переключатель 1.5(2.5) соединен со вторым выходом генератора 1.4(2.4) псевдошумового сигнала, а выход подключен ко второму входу смесителя 1.7(2.7).
Кроме того, первый пункт содержит приемник GPS-сигналов, состоящий из последовательно включенных приемной антенны 1.28, третьего усилителя 1.29 мощности, смесителя 1.30, второй вход которого соединен с выходом гетеродина 1.3, усилителя 1.31 промежуточной частоты, перемножителя 1.32, второй вход которого соединен с выходом гетеродина 1.3, полосового фильтра 1.33 и фазового детектора 1.34, второй вход которого соединен с выходом гетеродина 1.2, а вход подключен к третьему входу бортового контроллера 1.23, четвертый вход которого соединен с выходом датчиков 26, к которому также подключен бортовой регистратор 27.
При этом первый пункт размещен на подвижном объекте, в качестве которого может быть выбрано космическое, воздушное, водное или наземное транспортное средство, а второй наземный пункт выбран в качестве центра управления и контроля.
Устройство синхронизации часов работает следующим образом.
На первом шаге единичных измерений в момент времени t1 A по часам подвижного объекта ПО псевдошумовой сигнал α1 (фиг.8), созданный генератором 1.4 с помощью стандарта 1.1 частоты и времени, преобразуют с помощью гетеродина 1.2, смесителя 1.7 и усилителя 1.8 первой промежуточной частоты в сигнал с частотой ω1, усиливают с помощью усилителя 1.9 мощности и излучают через дуплексер 1.10 и приемо-передающую антенну 1.11 в направлении ИСЗ-ретранслятора S. Вместе с тем этот же сигнал клиппируют в клиппере 1.15 тактовой частотой того же стандарта частоты 1.1 и записывают в буферное запоминающее устройство 1.17. Регистрация синхронизируется стандартом 1.1 частоты и времени.
В тот же момент времени t1 A=t1 B по часам наземного центра управления и контроля ЦУК с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал (сигнал β1), регистрируют, но не отправляют на регистрацию (переключатель 2.5 разомкнут). Принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 (сигнал α1), переизлучают его на подвижный объект и наземный центр управления и контроля на частоте ω2 с сохранением фазовых соотношений, принимают ретранслированный сигнал на обоих пунктах, преобразуют его в сигнал на видеочастоте, регистрируют в моменты времени t2 A и t2 B соответственно (сигналы α2, β2).
На втором шаге (при передаче сигнала из центра управления и контроля) переключатель 1.5 должен быть разомкнут, а переключатель 2.5 замкнут и сигнал α3 из генератора 1.4 через клиппер 1.15 поступает на то же запоминающее устройство 1.17.
В произвольный момент времени t3 B=t2 B+Θ по часам второго пункта аналогично формируют и регистрируют шумовой СВЧ-сигнал (сигнал β3). Принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 (сигнал α3), переизлучают его в пункты А и В на частоте ω2 с сохранением фазовых составляющих, принимают ретранслированный сигнал в обоих пунктах, преобразуют его в сигналы на видеочастоте, регистрируют в моменты времени t4 A и t4 B соответственно (сигналы α4 и β4).
Корреляционной обработкой двух пар зарегистрированных сигналов в перерыве между актами измерений в корреляторах 1.19 и 2.19 определяют следующие временные задержки и их производные:




где Fi - частота интерференции (i=1, 2, 3, 4);
aj, bj (j>1, 2, 3) - время распространения сигнала между ИСЗ и пунктами А и В соответственно;
 ,
,  - задержки сигналов в излучающей аппаратуре обоих пунктов;
- задержки сигналов в излучающей аппаратуре обоих пунктов;
 ,
,  - задержки сигналов в приемо-регистрирующей аппаратуре;
- задержки сигналов в приемо-регистрирующей аппаратуре;
ΔS - задержка сигналов в бортовой аппаратуре ИСЗ-ретранслятора;
Δt=tB-tA - искомая разность показаний часов в один и тот же физический момент.
Полагая aj и bj линейными функциями с производными  ,
,  , получим:
, получим:



где 

Δ'A,B, Δ"A,B - задержки сигналов в атмосфере на частоте f1 и f2 соответственно;
ν - релятивистская поправка (эффект Саньяка);
ω - угловая скорость вращения Земли;
с - скорость света;
D - площадь четырехугольника О'A'S'В', образуемого в экваториальной плоскости центром масс Земли, проекциями пунктов А, В и ИСЗ-ретранслятора.
Поправку γ на подвижность ИСЗ-ретранслятора во время единичного измерения проще всего свести к нулю соответствующим выбором свободного параметра Θ:

который следует в начале измерений рассчитывать по приближенным эфемеридным данным, а затем уточнить по результатам текущих измерений.
Что касается поправки δ аппаратурные задержки, то ее можно найти путем калибровки по методу "нулевой базы". Атмосферная поправка ε также учитывается.
В пунктах А и В аппаратура работает одинаково, только порядок шагов в них обратный. Для вычисления разности показаний часов Δt достаточно обменяться между пунктами полученными цифровыми данными, что можно делать по обычным телефонным или телеграфным каналам связи. Результаты сличения поступают в бортовой 1.23 и наземный 2.23 контроллеры.
В процессе движения подвижного объекта датчики 26, расположенные в различных местах транспортного средства (двигательный отсек, корпус, система управления, топливные баки и т.д.), передают информацию о состоянии контролируемых узлов транспортного средства бортовому регистратору 27, который может быть выполнен в виде средства записи на магнитную ленту, оптический носитель, бумажный носитель и т.д.
Одновременно указанная информация поступает на второй вход бортового контроллера 1.23, на третий вход которого подается информация о местоположении подвижного объекта, полученная от приемника GPS-сигналов. Последний состоит из приемной антенны 1.18, усилителя 1.29 мощности, смесителя 1.30, второй вход которого соединен с выходом гетеродина 1.3, усилителя 1.31 второй промежуточной частоты, перемножителя 1.32, второй вход которого соединен с выходом гетеродина 1.3, полосового фильтра 1.33 и фазового детектора 1.34, второй вход которого соединен с выходом гетеродина 1.2, а выход подключен к третьему входу бортового контроллера 1.23.
В состав Глобальной навигационной системы GPS (Global Positioning System) входят космический сегмент, состоящий из 24 ИСЗ, сеть наземных станций наблюдения за их работой и пользовательский сегмент - навигационные приемники GPS-сигналов.
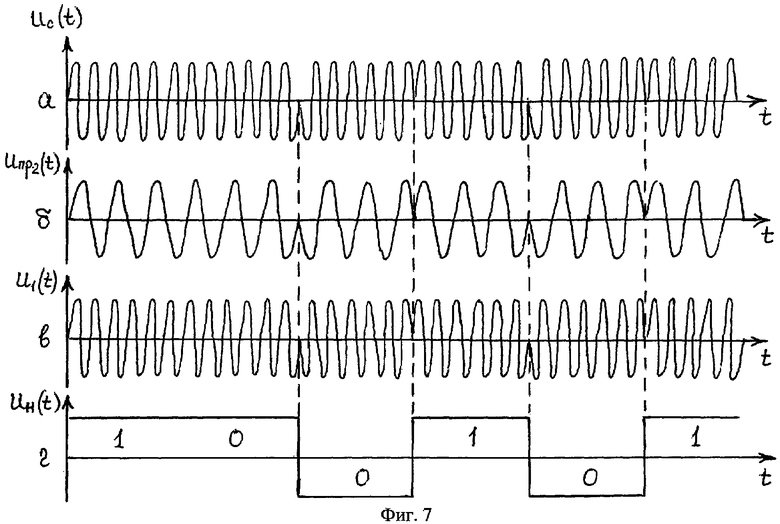
Каждый GPS-спутник излучает на частоте ω2=1575 МГц специальный навигационный сигнал в виде бинарного фазоманипулированного (ФМн) сигнала, манипулированного по фазе псевдослучайной последовательностью длиной 1023 символа (фиг.7, а):
 0≤t≤Tc,
0≤t≤Tc,
где ϕk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с псевдослучайной последовательностью длительностью N=1023.
Данный сигнал принимается антенной 1.28 и через усилитель 1.29 мощности поступает на первый вход смесителя 1.30, на второй вход которого подается напряжение гетеродина 1.3

На выходе смесителя 1.30 образуются напряжения комбинационных частот. Усилителем 1.31 выделяется напряжение второй промежуточной частоты (фиг.7,б)
 0≤t≤Tc,
0≤t≤Tc,
где 
K1 - коэффициент передачи смесителя;
ωпр2=ωг2-ω2 - вторая промежуточная частота;
ϕпр2=ϕ2-ϕг2,
которое поступает на первый вход перемножителя 1.32. На второй вход последнего подается напряжение uг2(t) гетеродина 1.3. На выходе перемножителя образуется напряжение (фиг.7, в)
 0≤t≤Tc,
0≤t≤Tc,
где  ;
;
K2 - коэффициент передачи перемножителя;
ωг1=ωг2-ωпр2,
которое представляет собой ФМн-сигнал на частоте ωг1 гетеродина 1.2 и поступает на первый (информационный) вход фазового детектора 1.34. На второй (опорный) вход фазового детектора 1.34 в качестве опорного напряжения подается напряжение гетеродина 1.2

В результате синхронного детектирования на выходе фазового детектора 1.3 образуется низкочастотное напряжение (фиг.7, г)

где 
K3 - коэффициент передачи фазового детектора,
которое поступает на третий вход бортового контроллера 1.23, где определяется местоположение подвижного объекта (широта и долгота). Для этого достаточно присутствия в зоне радиовидимости трех спутников. Точность определения местоположения подвижного объекта - 50...80 м.
Один из основных методов повышения точности определения местонахождения подвижного объекта и устранения ошибок, связанных с введением режима селективного доступа, основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим позволяет установить координаты транспортного средства с точностью до 5 м в динамической навигационной обстановке и до 2 м в статике.
Бортовой контроллер 1.23, выполненный с возможностью программирования времени между сеансами радиосвязи в зависимости от величины измеренных датчиками 26 параметров, с обусловленной периодичностью (например, 30 мин) через бортовой сегмент спутниковой связи, ИСЗ-ретранслятор и наземный сегмент спутниковой связи передает полученную информацию (местонахождение, протокол событий, техническое состояние, суть внештатной ситуации, если она возникла, а также полную траекторию передвижения за межсеансный промежуток) в наземный центр управления и контроля.
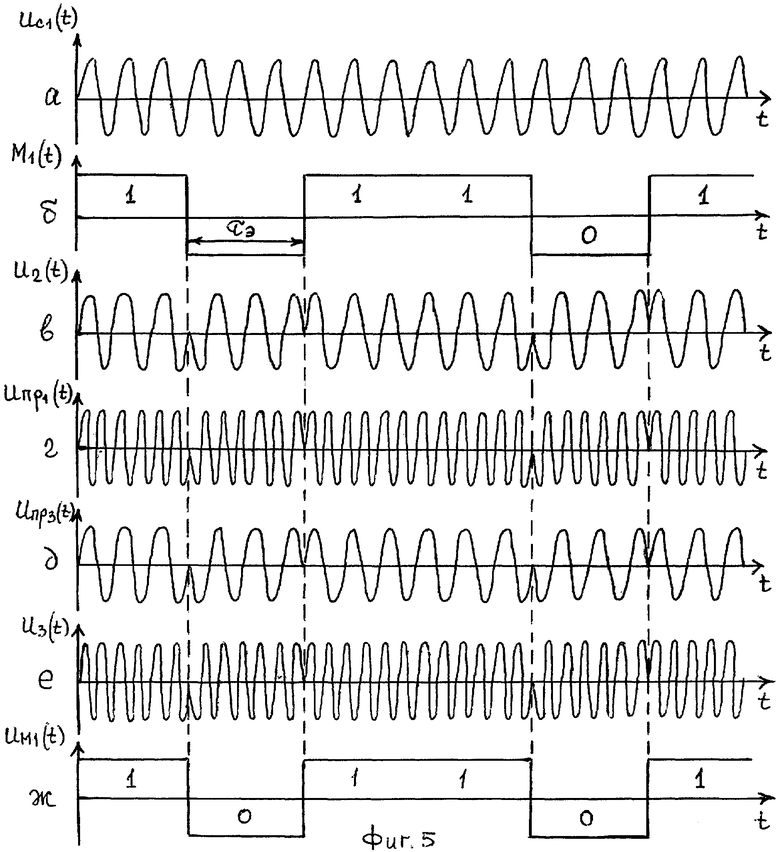
С этой целью задающий генератор 1.24 генерирует высокочастотное колебание (фиг.5,а)
 0≤t≤Tc,
0≤t≤Tc,
которое поступает на первый вход фазового манипулятора 1.25. На второй вход последнего подается с выхода бортового контроллера 1.23 модулирующий код M1(t) (фиг.5,б), содержащий информацию о техническом состоянии подвижного объекта и его местоположении. На выходе фазового манипулятора 1.25 формируется сложный ФМн-сигнал (фиг.5,в)
 0≤t≤Tc,
0≤t≤Tc,
где ϕk1(t)={0, π} - манипуляционная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5,б), причем ϕk1(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=1, 2, ... N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1 (Tc1=Nτэ), который через элемент ИЛИ 1.6 поступает на первый вход первого смесителя 1.7. На второй смеситель 1.7 с выхода первого гетеродина 1.2 подается напряжение uг1(t). Элемент ИЛИ 1.6 обеспечивает очередность поступления на первый вход смесителя 1.7 псевдошумового СВЧ-сигнала с выхода генератора 1.6 и ФМн-сигнала с выхода фазового детектора 1.25. На выходе смесителя 1.7 образуются напряжения комбинационных частот. Усилителем 1.8 выделяется напряжение только первой промежуточной (суммарной) частоты (фиг.5,г)
 0≤t≤Tc,
0≤t≤Tc,
где  ;
;
ωпр1=ωc+ωг1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕc+ϕг1,
которое после усиления в усилителе 1.9 мощности через дуплексер 1.10 поступает в приемо-передающую антенну 1.11, излучается ею в эфир в направлении ИСЗ-ретранслятора, переизлучается им на этой же частоте с сохранением фазовых соотношений, принимается антенной 2.11 наземного центра управления и контроля и через дуплексер 2.10 и усилитель 2.12 мощности поступает на первый вход смесителя 2.13, на второй вход которого подается напряжение uu1(t) гетеродина 2.3. На выходе смесителя 2.13 образуются напряжения комбинационных частот. Усилителем 2.14 выделяется напряжение второй промежуточной (разностной) частоты (фиг.5,д)
 0≤t≤Tc1,
0≤t≤Tc1,
где  ;
;
ωпр2=ωпр1-ωг1 - вторая промежуточная (разностная) частота;
ϕпр3=ϕпр1-ϕг1,
которое поступает на первый вход перемножителя 2.20. На второй вход перемножителя 2.20 подается напряжение uг2(t) гетеродина 2.2. На выходе перемножителя 2.20 образуется напряжение (фиг.5,е)
 0≤t≤Tc1,
0≤t≤Tc1,
где  ;
;
ωг1=ωпр=ωг2-ωпр2 - промежуточная частота,
которое выделяется полосовым фильтром 2.21 и поступает на первый (информационный) вход фазового детектора 2.22. На второй (опорный) вход фазового детектора 2.22 подается напряжение uг1(t) гетеродина 2.3 в качестве опорного напряжения. В результате синхронного детектирования на выходе фазового детектора 2.22 образуется низкочастотное напряжение (фиг.5,ж)

где 
которое поступает на второй вход наземного контролера 2.23.
По результатам анализа ситуации наземным контроллером 2.23 на наземном центре управления и контроля принимается соответствующее решение, например об отключении неисправного двигателя, или формируются рекомендации экипажу по действиям при развитии нештатных ситуаций.
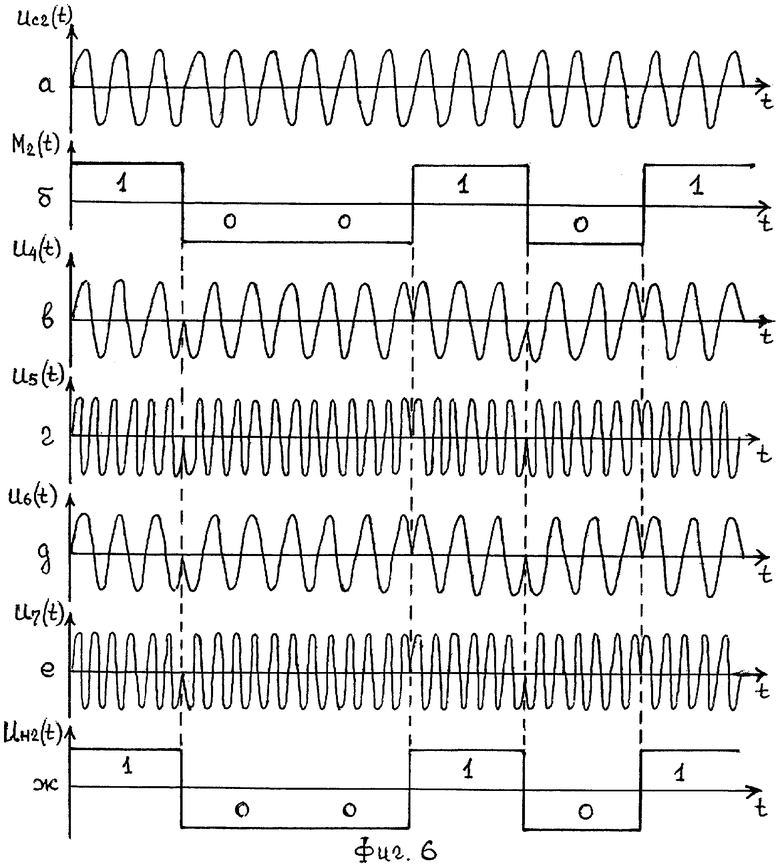
Для передачи указанных команд в наземном контроллере 2.23 формируется модулирующий код M2(t) (фиг.6,б), который поступает на второй вход фазового манипулятора 2.25. На первый вход последнего подается высокочастотное колебание с выхода задающего генератора 2.24 (фиг.6,а)
 0≤t≤Tc2.
0≤t≤Tc2.
На выходе фазового манипулятора 2.25 формируется сложный ФМн-сигнал (фиг.6,б)
 0≤t≤Tc2,
0≤t≤Tc2,
который через элемент ИЛИ 2.6 поступает на первый вход смесителя 2.7. На второй вход смесителя 2.7 подается напряжение uг2(t) гетеродина 2.2. На выходе смесителя 2.7 образуются напряжения комбинационных частот. Усилителем 2.8 выделяется напряжение промежуточной частоты (фиг.6,г)
 0≤t≤Tc2,
0≤t≤Tc2,
где 
ωпр=ωг2-ωc=ω2 - промежуточная частота;
ϕ4=ϕc-ϕг2,
которое после усиления в усилителе 2.9 мощности через дуплексер 2.10 поступает в приемо-передающую антенну 2.11, излучается ею в направление ИСЗ-ретранслятора на частоте ω2, переизлучается бортовой аппаратурой ИСЗ-ретранслятора с сохранением фазовых соотношений, принимается антенной 1.11 подвижного объекта и через дуплексер 1.10 и усилитель 1.12 мощности поступает на первый вход смесителя 1.13, на второй вход которого подается напряжение uг2(t) гетеродина 1.3. На выходе смесителя 1.13 образуются напряжения комбинационных частот. Усилителем 1.14 выделяется напряжение второй промежуточной частоты (фиг.6,д)
 0≤t≤Tc2,
0≤t≤Tc2,
где 
ωпр2=ωг2-ω2 - вторая промежуточная частота;
ϕ6=ϕ4-ϕг2,
которое поступает на первый вход перемножителя 1.20. На второй вход последнего подается напряжение uг2(t) гетеродина 1.3. На выходе перемножителя 1.20 образуется напряжение (фиг.6,е)
 0≤t≤Tc2,
0≤t≤Tc2,
где 
ωпр=ωг2-ωпр2=ωпр - промежуточная частота;
ϕ7=ϕ6-ϕг2,
которое выделяется полосовым фильтром 1.21 и поступает на первый вход фазового детектора 1.22. На второй (опорный) вход фазового детектора 1.22 подается напряжение uг1(t) в качестве опорного напряжения. В результате синхронного детектирования на выходе фазового детектора 1.22 образуется низкочастотное напряжение (фиг.6,ж)

где 
которое поступает на четвертый вход бортового контроллера 1.23, где реализуются команды и рекомендации наземного центра управления и контроля.
В случае соответствия всех измеренных датчиками 26 параметров условиям нормальной эксплуатации подвижного объекта, а места нахождения подвижного объекта - плановому месту нахождения передача дискретной информации с борта подвижного объекта в наземный центр управления и контроля происходит с заданной периодичностью (например, один раз в 30 мин).
При превышении хотя бы одного из измеренных параметров заданного уровня или отклонения места нахождения подвижного объекта от планового места нахождения период между передачами сокращается.
При создании аварийной ситуации дискретную информацию с борта подвижного объекта передают непрерывно.
Режим передачи дискретной информации бортовым контроллером 1.23 может быть также изменен решением командного состава подвижного объекта или наземным центром управления и контроля.
При возвращении контролируемых параметров к допустимым значениям, а также соответствии места нахождения подвижного объекта плановому месту нахождения период между передачей дискретной информации будет снова увеличен.
Таким образом, предлагаемое устройство синхронизации часов по сравнению с прототипом обеспечивает не только сличение удаленных шкал времени, но и дистанционное управление и контроль за техническим состоянием подвижного объекта и его местонахождением в процессе передвижения. Это достигается применением метода дуплексной радиосвязи с использованием сложных сигналов с фазовой манипуляцией.
Указанные сигналы открывают новые возможности в технике передачи дискретной информации. Они позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
К числу других проблем, от решения которых в значительной мере зависит дальнейший прогресс средств радиосвязи, следует отнести проблему установления надежной связи в каналах при наличии многолучевого характера распространения радиоволн. Наличие многолучевого характера распространения радиоволн приводит к искажению принимаемых сигналов, что затрудняет прием и снижает достоверность передачи информации.
Попытки преодолеть вредное влияние многолучевости предпринимаются уже давно. К ним можно отнести разнесенный прием, селекцию сигналов по времени и углу прихода, корректирующее кодирование и некоторые другие методы. Однако все они не дают принципиального решения проблемы.
Сложный ФМн-сигнал благодаря своим хорошим корреляционным свойствам может быть "свернут" в узкий импульс, длительность которого обратно пропорциональна используемой ширине полосы частот. Выбирая такую полосу частот, чтобы длительность "свернутого" импульса была меньше времени запаздывания, можно осуществить раздельный прием импульсов, приходящих в точку приема различными путями, а суммируя их энергию, можно, кроме того, повысить помехоустойчивость приема сложных ФМн-сигналов. Тем самым указанная проблема получает принципиальное разрешение.
С точки зрения обнаружения сложные ФМн-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала. Она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Предлагаемое устройство может быть использовано для контроля выполнения рейсов воздушными и морскими транспортными средствами, для контроля учений авиации дальнего действия и морского флота, при полете пилотируемых космических кораблей и искусственных спутников Земли, для обеспечения испытаний авиационной и морской техники за пределами видимости средств испытательных баз, для контроля за работой малоопытных экипажей и изношенной техники.
Использование предлагаемого устройства позволяет принимать решения по действию в нештатных ситуациях в момент их возникновения, передавать на борт подвижного объекта рекомендации по действиям при развитии нештатных ситуаций, выдавать указания службам спасения при неблагоприятном развитии нештатных ситуаций, выдавать точное целеуказание на поиск потерпевшего аварию транспортного средства. Тем самым функциональные возможности устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2012 |
|
RU2507555C2 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2386159C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2528405C1 |
| МОДЕМ СИГНАЛОВ ПЕРЕДАЧИ ВРЕМЕНИ ПО ДУПЛЕКСНОМУ КАНАЛУ СПУТНИКОВОЙ СВЯЗИ | 2016 |
|
RU2623718C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2350998C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439643C1 |
Изобретение относится к области средств связи и сигнализации и может быть использовано для сличения шкал времени, разнесенных на большие расстояния и размещенных на транспортном средстве и наземном пункте управления и контроля, а также для дистанционного контроля за техническим состоянием транспортного средства и его местонахождением на наземном пункте управления и контроля. Техническим результатом изобретения является расширение функциональных возможностей устройства путем обеспечения возможности дистанционного управления и контроля за техническим состоянием подвижного объекта и его местонахождением в процессе передвижения. Устройство синхронизации часов содержит ИСЗ-ретранслятор, спутники навигационной системы GPS, первый и второй пункты. Первый пункт, размещенный на подвижном объекте, содержит стандарт частоты и времени, два гетеродина, генератор псевдошумового сигнала, перемножитель, элемент ИЛИ, три смесителя, три усилителя промежуточной частоты, три усилителя мощности, дуплексер, приемопередающую антенну, два клиппера, два блока памяти, коррелятор, два перемножителя, два полосовых фильтра, два фазовых детектора, бортовой контроллер, задающий генератор, фазовый манипулятор, датчики и бортовой регистратор. Второй пункт, выбранный в качестве наземного центра управления и контроля, содержит стандарт частоты и времени, два гетеродина, генератор псевдошумового сигнала, переключатель, элемент ИЛИ, два смесителя, два усилителя промежуточной частоты, два клиппера, два блока памяти, коррелятор, перемножитель, полосовой фильтр, фазовый детектор, наземный контроллер, задающий генератор и фазовый манипулятор. 8 ил.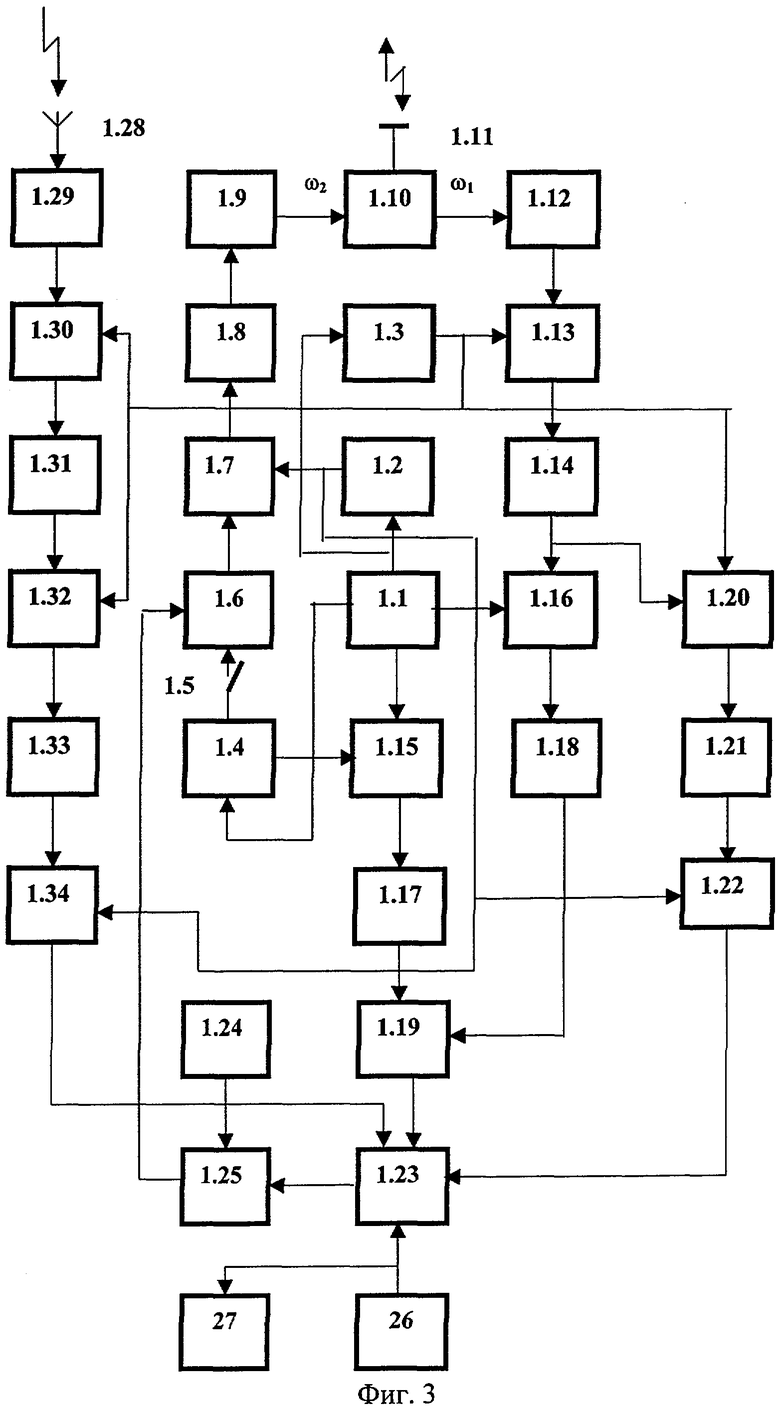
Устройство синхронизации часов, содержащее ИСЗ-ретранслятор, первый и второй пункты, каждый из которых содержит последовательно включенные эталон частоты и времени, первый гетеродин, первый смеситель, первый усилитель промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого через второй гетеродин соединен с первым выходом эталона частоты и времени, второй клиппер, второй вход которого соединен с четвертым выходом эталона частоты и времени, второй блок памяти и коррелятор, последовательно подключенные ко второму выходу эталона частоты и времени, генератор псевдошумового сигнала, первый клиппер, второй вход которого соединен с третьим выходом эталона частоты и времени, и первый блок памяти, выход которого соединен со вторым входом коррелятора, отличающееся тем, что оно снабжено на первом пункте элементом ИЛИ, двумя перемножителями, двумя полосовыми фильтрами, двумя фазовыми детекторами, бортовым контроллером, датчиками, бортовым регистратором, задающим генератором, фазовым манипулятором, приемной антенной, третьим усилителем мощности, третьим смесителем, третьим усилителем промежуточной частоты, причем к выходу второго усилителя промежуточной частоты последовательно подключены первый перемножитель, второй вход которого соединен с выходом второго гетеродина, первый полосовой фильтр, первый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, бортовой контроллер, второй вход которого соединен с выходом коррелятора, фазовый манипулятор, второй вход которого соединен с выходом задающего генератора, и элемент ИЛИ, второй вход которого через переключатель соединен со вторым выходом генератора псевдошумового сигнала, а выход подключен ко второму входу первого смесителя, к выходу приемной антенны последовательно подключены третий усилитель мощности, третий смеситель, второй вход которого соединен с выходом второго гетеродина, третий усилитель промежуточной частоты, второй перемножитель, второй вход которого соединен с выходом второго гетеродина, второй полосовой фильтр и второй фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к третьему входу бортового контроллера, выход датчиков подключен к бортовому регистратору и к четвертому входу бортового контроллера, на втором пункте устройство снабжено элементом ИЛИ, перемножителем, полосовым фильтром, фазовым детектором, наземным контроллером, задающим генератором и фазовым манипулятором, причем к выходу второго усилителя промежуточной частоты последовательно подключены перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр, фазовый детектор, второй вход которого соединен с выходом второго гетеродина, наземный контроллер, второй вход которого соединен с выходом коррелятора, фазовый манипулятор, второй вход которого соединен с выходом задающего генератора, и элемент ИЛИ, второй вход которого через переключатель соединен со вторым выходом генератора псевдошумового сигнала, а выход подключен ко второму входу первого смесителя, при этом первый пункт размещен на подвижном объекте, в качестве которого может быть выбрано космическое, воздушное, водное или наземное транспортное средство, а второй наземный пункт выбран в качестве центра управления и контроля.
| RU 2001423 C1, 15.10.1993 | |||
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| Гидравлический тормоз для испытания двигателей | 1932 |
|
SU30048A1 |
| Способ перегрузки пакетного груза | 1972 |
|
SU564220A1 |
| DE 3278943 A, 29.09.1988. | |||

