Предлагаемый способ относится к области средств связи и сигнализации и может быть использован для сличения шкал времени, разнесенных на большое расстояние и размещенных на транспортных средствах и наземном пункте управления и контроля, и для дистанционного контроля технического состояния транспортного средства и его местонахождения на наземном пункте управления и контроля.
Известны способы сличения шкал времени (авт. свид. №№591.799, 614.416, 970.300, 1.180.835, 1.244.632, 1.278.800; патенты РФ №№2.001.423, 2.003.157, 2.040.035, 2.177.167, 2.182.341, 2.248.669, 2.301.437; патент США №5.519.759; патент WO №99/57.826; B.C. Губанов, A.M. Финкельштейн, П.А. Фридман. Введение в радиоастрономию. - М., 1983 и другие).
Из известных способов синхронизации шкал времени наиболее близким к предлагаемому является «Способ сличения шкал времени» (патент РФ №2.301.437, G04C 11/02, 2005), который и выбран в качестве прототипа.
Указанный способ обеспечивает сличение шкал времени, разнесенных на большое расстояние, и основан на использовании дуплексного метода связи через геостационарный ИСЗ-ретранслятор.
Основное достоинство дуплексного метода связи состоит в том, что в нем исключается длина трассы прохождения сигнала. Поэтому его точность в основном зависит от параметров бортового ретранслятора, типа используемого сигнала и техники измерения временных интервалов.
Известный способ обеспечивает дистанционное наблюдение из центра управления и контроля за поведением подвижных объектов, работой их систем и действием экипажей, а также дистанционный контроль за техническим состоянием подвижных объектов и их местоположением. При этом в качестве подвижных объектов могут быть космические, воздушные, водные и наземные транспортные средства.
Для реализации дуплексной связи между пунктом управления и контроля и подвижными объектами в известном способе используются супергетеродинные приемники, в которых одно и то же значение второй промежуточной частоты ωпр2 может быть получено в результате приема сигналов на следующих частотах:
ωпр2=ω1-ωГ1, ωпр2=ωГ1-ω2,
ωпр2=ωГ1-ωЗ1, ωпр2=ωЗ2-ωГ2.
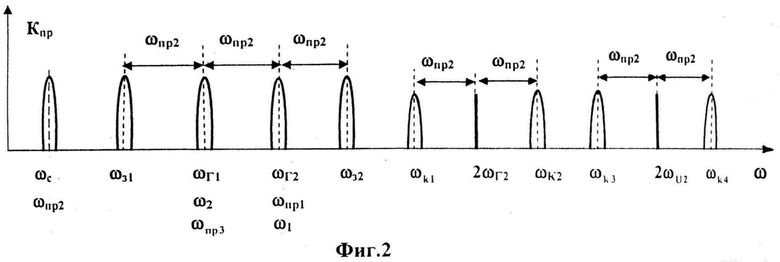
Следовательно, если частоты настройки ω1 и ω2 являются основными каналами приема, то наряду с ними существуют и зеркальные каналы приема, частоты ωЗ1 и ωЗ2, которые расположены симметрично (зеркально) относительно частот ωЗ1 и ωЗ2 гетеродинов (фиг.2). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования Кпр1, что и по основным каналам. Поэтому зеркальные каналы приема наиболее существенно влияют на избирательность и помехоустойчивость супергетеродинных приемников. Кроме зеркальных существуют и другие дополнительные (комбинационные и канал прямого прохождения) каналы приема.
В общем виде любой комбинационный канал приема имеет место при выполнении условий:
ωПР2=|±mωKi±nωГ1|
ωПР2=|±mωKi±nωГ2|,
где ωKi - частота i-го комбинационного канала приема;
n, m, i - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующие при взаимодействии первой гармоники частоты сигнала с гармониками частот гетеродинов малого порядка (второй, третий), так как чувствительность приемников по этим каналам близка к чувствительности основных каналов.
Так четырем комбинационным каналам при m=1 и n=2 соответствуют частоты:
ωК1=2ωГ1-ωПР2: ωК2=2ωГ1+ωПР2,
ωК3=2ωГ2-ωПР2; ωК4=2ωГ2+ωПР2.
Если частота ωП ложного сигнала (помехи) равна второй промежуточной частоте ωпр2(ωП=ωпр2), то образуется канал приема прохождения, для которого
блоки и элементы приемников являются простыми передаточными звеньями.
Наличие ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, а также по каналу прямого прохождения, приводит к снижению избирательности, помехоустойчивости и надежности дуплексной связи между пунктом управления и контроля и подвижными объектами.
Технической задачей изобретения является повышение избирательности, помехоустойчивости и надежности дуплексной связи между пунктом управления и контроля и подвижными объектами путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам.
Поставленная задача решается тем, что согласно способа сличения шкал времени, основанный, в соответствии с ближайшим аналогом, на одновременном приеме разнесенными пунктами шумовых СВЧ-сигналов с борта искусственного спутника Земли (ИСЗ), когерентном их преобразованием к видеочастоте, цифровой регистрации принятых сигналов и определении временной задержки прихода одного и того же сигнала в пункты синхронизации методом корреляционной обработки зарегистрированных сигналов, по величине которой производят сличение шкал времени, при этом в начальный момент времени t1 по часам первого пункта с помощью кодовой последовательности формируют шумовой СВЧ-сигнал, регистрируют его на этом же пункте, сформированный сигнал преобразуют в сигнал с частотой ω1, усиливают его по мощности, излучают усиленный сигнал в направление на ИСЗ-ретранслятор, в тот же момент времени t1 по часам второго пункта с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал, регистрируют его на втором пункте, принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1, переизлучают его на первый и второй пункты на частоте ω2 с сохранением фазовых соотношений, в произвольный момент времени t3 по часам второго пункта аналогично формируют и ретранслируют шумовой СВЧ-сигнал, сформированный сигнал преобразуют в сигнал на частоте ω1, усиливают его по мощности, излучают усиленный сигнал в направлении того же ИСЗ-ретранслятора, в тот же момент времени t3 по часам первого пункта с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал, регистрируют его на первом пункте, принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 и переизлучают его на первый и второй пункты на частоте ω2 с сохранением фазовых соотношений, первый пункт размещают на подвижном объекте, в качестве которого используют космическое, воздушное, водное или наземное транспортное средство, а второй наземный пункт используют в качестве центра управления и контроля, координаты которого определяют в результате прецизионной геодезической съемки, на подвижном объекте измеряют параметры, определяющие его техническое состояние, регистрируют их и преобразуют в модулирующий код, генерируют высокочастотное колебание на частоте ωс, манипулируют его по фазе модулирующим кодом, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием напряжения первой промежуточной частоты ωпр1=ωс+ωг1, где ωг1 - частота первого гетеродина, усиливают его по мощности, излучают усиленный сигнал в направлении на ИСЗ-ретранслятор, переизлучают его в центр управления и контроля на частоте ω1=ωпр1=ωг2, где ωг2 - частота второго гетеродина, с сохранением фазовых соотношений, принимают сложный сигнал с фазовой манипуляцией в центре управления и контроля, усиливают его по мощности, преобразуют по частоте с использованием первого гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ω1-ωг1=ωc перемножают его с напряжением второго гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωг1 первого гетеродина, осуществляют его синхронное детектирование с использованием напряжения первого гетеродина в качестве опорного напряжения, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, аналогично осуществляют передачу дискретной информации из центра управления и контроля на подвижный объект, при этом на подвижном объекте сложные сигналы с фазовой манипуляцией, излучают на частоте ω1, а принимают на частоте ω2, а в центре управления и контроля сложные сигналы с фазовой манипуляцией излучают на частоте ω2, а принимают на частоте ω1, одновременно на подвижном объекте принимают GPS-сигнал на частоте ω2, усиливают его по мощности, преобразуют по частоте с использованием напряжения второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωг2-ω2, перемножают его с напряжением второго гетеродина, выделяют GPS-сигнал на частоте ωг1 первого гетеродина, осуществляют его синхронное детектирование с использованием частоты ωг1 первого гетеродина, выделяют низкочастотное напряжение, используют его для определения местонахождения подвижного объекта и передают информацию о местонахождении подвижного объекта в центр управления и контроля, в случае соответствия всех измеренных параметров условию нормальной эксплуатации подвижного объекта, а место нахождения подвижного объекта - плановому месту нахождения передачу дискретной информации с борта подвижного объекта в наземный центр управления и контроля осуществляют с заданной периодичностью, при превышении хотя бы одного из измеренных параметров заданного уровня или отклонения места нахождения подвижного объекта от планового места нахождения период между передачами сокращают, причем при создании аварийной ситуации дискретную информацию передают с борта подвижного объекта непрерывно, при возвращении контролируемых параметров к допустимым значениям, а также соответствия места нахождения подвижного объекта плановому месту нахождения период между передачей дискретной информации снова увеличивают, отличается от ближайшего аналога тем, что на подвижном объекте и в центре управления и контроля принятый и усиленный по мощности сигнал подают колебательную систему, частота настройки которой равна частоте первого гетеродина, при возникновении явления резонанса выделяют амплитуду резонансного колебания, сравнивают ее с пороговым уровнем и в случае его превышения разрешают дальнейшую обработку низкочастотного напряжения, на подвижном объекте и в центре управления и контроля при поступлении ложного сигнала (помехи) на второй промежуточной частоте ωпр2, выделяют его, инвертируют по фазе на 180° и суммируют с принимаемым ложным сигналом (помехой), компенсируя его.
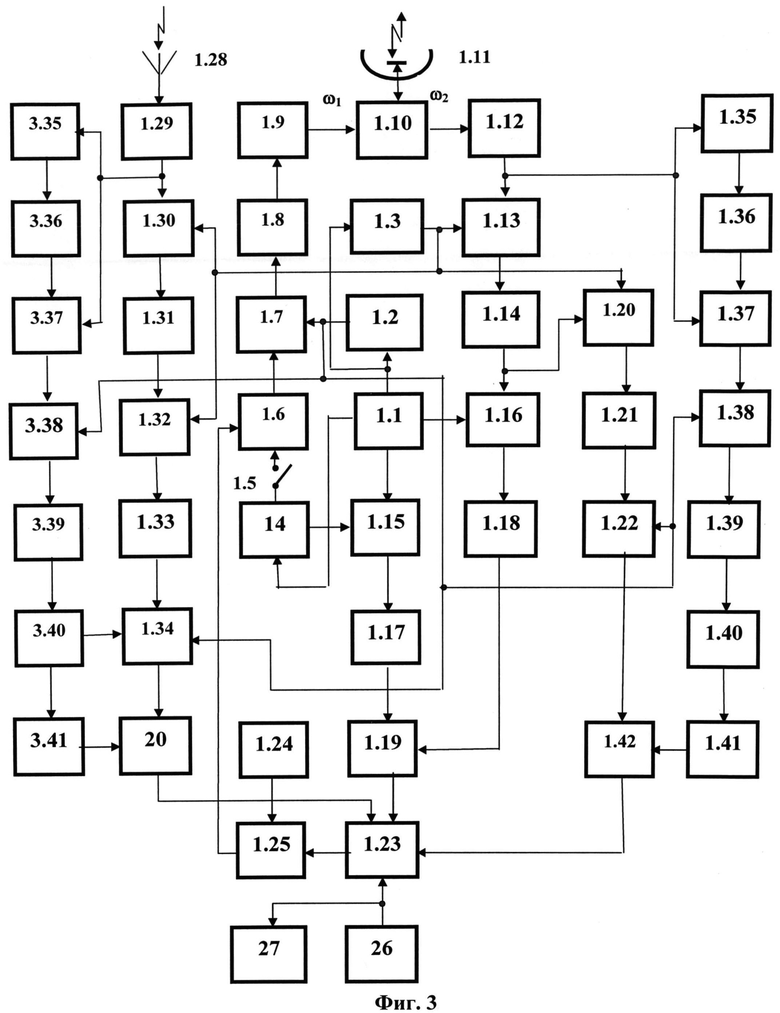
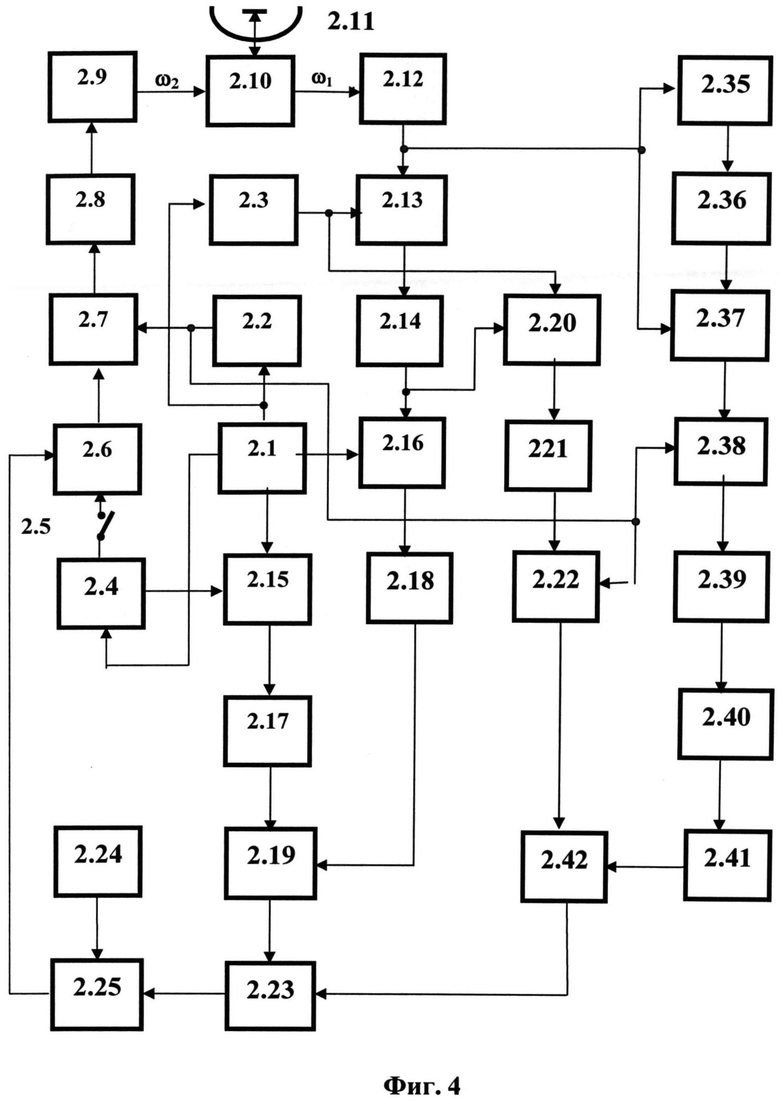
Геометрическая схема расположения подвижного объекта ПО, наземного центра управления и контроля ЦУК, спутников навигационной системы GPS, и ИСЗ-ретранслятора S изображена на фиг.1, где введены следующие обозначения: О - центр масс Земли; d - база интерферометра; r - радиус-вектор ИСЗ-ретранслятора, размещенного на геостационарной орбите. Частотная диаграмма, поясняющая преобразование сигналов, изображена на фиг.2. Структурная схема подвижного объекта ПО представлена на фиг.3. Структурная схема наземного центра управления и контроля ЦУК представлена на фиг.4. Временные диаграммы, поясняющие работу подвижного объекта, наземного центра управления и контроля и приемника GPS-сигналов, изображены на фиг.5, 6, 7.
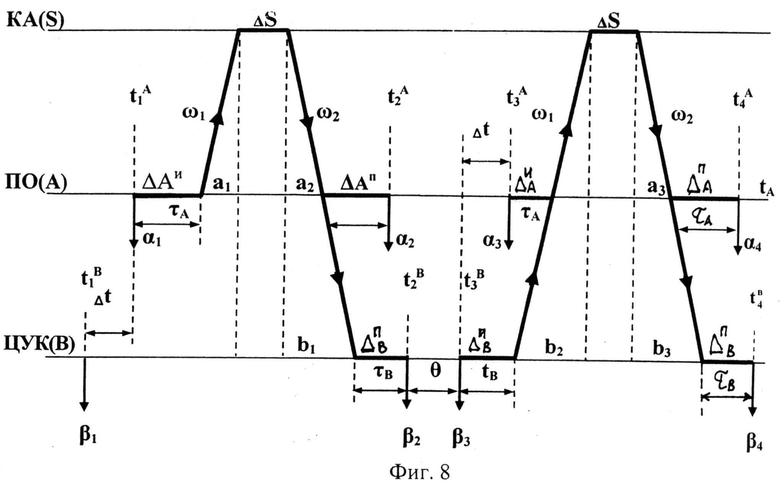
Временная диаграмма дуплексного метода сличения часов представлена на фиг.8, где введены следующие обозначения: S, А, В - шкала времени ИСЗ-ретранслятора, подвижного объекта ПО и наземного центра управления и контроля ЦУК соответственно.
Бортовая аппаратура подвижного объекта и наземная аппаратура центра управления и контроля включают: 1.1 (2.1) - стандарт частоты и времени, 1.2 (2.2) - первый гетеродин, 1.3 (2.3) - второй гетеродин, 1.4 (2.4) - генератор псевдошумового сигнала, 1.5 (2.5) - переключатель, 1.6 (2.6) - элемент ИЛИ, 1.7 (2.7)- первый смеситель, 1.8 (2.8) - усилитель первой промежуточной частоты, 1.9 (2.9) - первый усилитель мощности, 1.10 (2.10) - дуплексер, 1.11 (2.11) - приемопередающую антенну, 1.12 (2.12) - второй усилитель мощности, 1.13 (2.13) - второй смеситель, 1.14 (2.14) - усилитель второй промежуточной частоты, 1.15 (2.15), - первый клиппер, 1.16 (2.16) - второй клипер, 1.17 (2.17) - первое буферное запоминающее устройства, 1.18 (2.18) - второе буферное запоминающее устройство, 1.19 (2.19) - измеритель задержек и их производных, 1.20 (2.20) - перемножитель, 1.21 (2.21) - полосовой фильтр, 1.22 (2.22) - фазовый детектор, 1.23 (2.23) - бортовой контролер, 1.24 (2.24) - задающий генератор, 1.25 (2.25) - фазовый манипулятор, 26 - датчики, характеризующие техническое состояние подвижного объекта, 27 - бортовой регистратор, 1.28 - приемную антенну, 1.29 - усилитель мощности, 1.30 - смеситель, 1.31 - усилитель второй промежуточной частоты, 1.32 - перемножитель, 1.33 - полосовой фильтр, 1.34 - фазовый детектор, 1.35 (2.35, 3.35) - первый узкополосный фильтр, 1.36 (2.36, 3.36) - фазоинвертор, 1.37 (2.37, 3.37) - фазоинвертор, 1.38 (2.38, 3.38) - селектор частоты, 1.39 (2.39, 3.39) - второй узкополосный фильтр, 1.40 (2.40, 3.40) - амплитудный детектор, 1.41 (2.41, 3.41) - пороговый блок, 1.42 (2.42, 3.42) - ключ.
Приемная антенна 1.28, усилитель 1.29 мощности, смеситель 1.30, усилитель 1.31 второй промежуточной частоты, перемножитель 1.32, полосовой фильтр 1.33 и фазовый детектор 1.34, первый узкополосный фильтр 2.35, фазоинвертор 3.36, сумматор 3.37, селектор 3.38 частоты, второй узкополосный фильтр 3.39, амплитудный детектор 3.40, пороговый блок 3.41 и ключ 3.42 образуют приемник ГЛОНАСС/GPS - сигналов.
Предлагаемый способ сличения шкал времени реализуют следующим образом. На первом шаге единичных измерений в момент времени  по часам подвижного объекта ПО псевдошумовой сигнал α1 (фиг.8), созданный генератором 1.4 с помощью стандарта 1.1 частоты и времени, преобразуют с помощью гетеродина 1.2, смесителя 1.7 и усилителя 1.8 первой промежуточной частоты в сигнал с частотой ω1, усиливают с помощью усилителя 1.9 мощности и излучают через дуплексер 1.10 и приемопередающую антенну 1.11 в направлении ИСЗ-ретранслятора S. Вместе с тем этот же сигнал клиппируют в клиппере 1.15 тактовой частотой того же стандарта частоты 1.1 и записывают в буферное запоминающее устройство 1.17. Регистрация синхронизируется стандартом 1.1 частоты и времени.
по часам подвижного объекта ПО псевдошумовой сигнал α1 (фиг.8), созданный генератором 1.4 с помощью стандарта 1.1 частоты и времени, преобразуют с помощью гетеродина 1.2, смесителя 1.7 и усилителя 1.8 первой промежуточной частоты в сигнал с частотой ω1, усиливают с помощью усилителя 1.9 мощности и излучают через дуплексер 1.10 и приемопередающую антенну 1.11 в направлении ИСЗ-ретранслятора S. Вместе с тем этот же сигнал клиппируют в клиппере 1.15 тактовой частотой того же стандарта частоты 1.1 и записывают в буферное запоминающее устройство 1.17. Регистрация синхронизируется стандартом 1.1 частоты и времени.
В тот же момент времени  по часам наземного центра управления и контроля ЦУК с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал (сигнал β1), регистрируют, но не отправляют на регистрацию (переключатель 2.5 разомкнут). Принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 (сигнал α1), переизлучают его на подвижный объект и наземный центр управления и контроля на частоте ω2 с сохранением фазовых соотношений, принимают ретранслированный сигнал на обоих пунктах, преобразуют его в сигнал на видеочастоте, регистрируют в моменты времени
по часам наземного центра управления и контроля ЦУК с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал (сигнал β1), регистрируют, но не отправляют на регистрацию (переключатель 2.5 разомкнут). Принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 (сигнал α1), переизлучают его на подвижный объект и наземный центр управления и контроля на частоте ω2 с сохранением фазовых соотношений, принимают ретранслированный сигнал на обоих пунктах, преобразуют его в сигнал на видеочастоте, регистрируют в моменты времени  и
и  соответственно (сигналы α2, β2).
соответственно (сигналы α2, β2).
На втором шаге (при передаче сигнала из центра управления и контроля) переключатель 1.5 должен быть разомкнут, а переключатель 2.5 замкнут и сигнал α3 из генератора 1.4 через клиппер 1.15 поступает на то же запоминающее устройство 1.17.
В произвольный момент времени  по часам второго пункта аналогично формируют и регистрируют шумовой СВЧ-сигнал (сигнал β3). Принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 (сигнал α3), переизлучают его в пункты А и В на частоте ω2 с сохранением фазовых составляющих, принимают ретранслированный сигнал в обоих пунктах, преобразуют его в сигналы на видеочастоте, регистрируют в моменты времени
по часам второго пункта аналогично формируют и регистрируют шумовой СВЧ-сигнал (сигнал β3). Принимают бортовой аппаратурой ИСЗ-ретранслятора сигнал на частоте ω1 (сигнал α3), переизлучают его в пункты А и В на частоте ω2 с сохранением фазовых составляющих, принимают ретранслированный сигнал в обоих пунктах, преобразуют его в сигналы на видеочастоте, регистрируют в моменты времени  и
и  соответственно (сигналы α4 и β4).
соответственно (сигналы α4 и β4).
Корреляционной обработкой двух пар зарегистрированных сигналов в перерыве между актами измерений в измерителях 1.19 и 2.19 определяют следующие временные задержки и их производные:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
где Fi - частота интерференции (i=1, 2, 3, 4);
 ,
,
aj, bj (j>1, 2, 3)- время распространения сигнала между ИСЗ и пунктами А и В соответственно;
 ,
,  - задержки сигналов в излучающей аппаратуре обоих пунктов;
- задержки сигналов в излучающей аппаратуре обоих пунктов;
 ,
,  - задержки сигналов в приемо-регистрирующей аппаратуре;
- задержки сигналов в приемо-регистрирующей аппаратуре;
ΔS - задержка сигналов в бортовой аппаратуре ИСЗ-ретранслятора;
Δt=tB-tA - искомая разность показаний часов в один и тот же физический момент.
Полагая aj и bj линейными функциями с производными  ,
,  , получим:
, получим:
 ,
,
 ,
,
 ,
,
где  ,
,
 ,
,
 ,
,  - задержки сигналов в атмосфере на частоте f1 и f2 соответственно;
- задержки сигналов в атмосфере на частоте f1 и f2 соответственно;
v - релятивистская поправка (эффект Саньяка);
ω - угловая скорость вращения Земли;
с - скорость света;
D - площадь четырехугольника O'A'S'B', образуемого в экваториальной плоскости центром масс Земли, проекциями пунктов А, В и ИСЗ-ретранслятора.
Поправку γ на подвижность ИСЗ-ретранслятора во время единичного измерения проще всего свести к нулю соответствующим выбором свободного параметра Θ:

который следует в начале измерений рассчитывать по приближенным эфемеридным данным, а затем уточнить по результатам текущих измерений.
Что касается поправки δ аппаратурные задержки. То ее можно найти путем калибровки по методу «нулевой базы». Атмосферная поправка ε также учитывается.
В пунктах А и В аппаратура работает одинаково, только порядок шагов в них обратный. Для вычисления разности показаний часов Δt достаточно обменяться между пунктами полученными цифровыми данными, что можно делать по обычным телефонным или телеграфным каналам связи. Результаты сличения поступают в бортовой 1.23 и наземный 2.23 контроллеры.
В процессе движения подвижного объекта датчики 26, расположенные в различных местах транспортного средства (двигательный отсек, корпус, система управления, топливные баки и т.д.), передают информацию о состоянии контролируемых узлов транспортного средства бортовому регистратору 27, который может быть выполнен в виде средства записи на магнитную ленту, оптический носитель, бумажный носитель и т.д.
Одновременно указанная информация поступает на второй вход бортового контроллера 1.23, на третий вход которого подается информация о местоположении подвижного объекта, полученная от приемника GPS-сигналов. Последний состоит из приемной антенны 1.18, усилителя 1.29 мощности, смесителя 1.30, усилителя 1.31 второй промежуточной частоты, перемножитель 1.32, фазовый детектор 1.34, узкополосных фильтров 3.35 и 3.39, фазоинвертора 3.36, сумматора 3.37, селектора 3.38 частоты, амплитудного детектора 3.40, первого блока 3.41 и ключа 3.42.
В состав Глобальной навигационной системы GPS входят космический сегмент, состоящий из 24 ИСЗ, сеть наземных станций наблюдения за их работой и пользовательский сегмент - навигационные приемники GPS-сигналов.
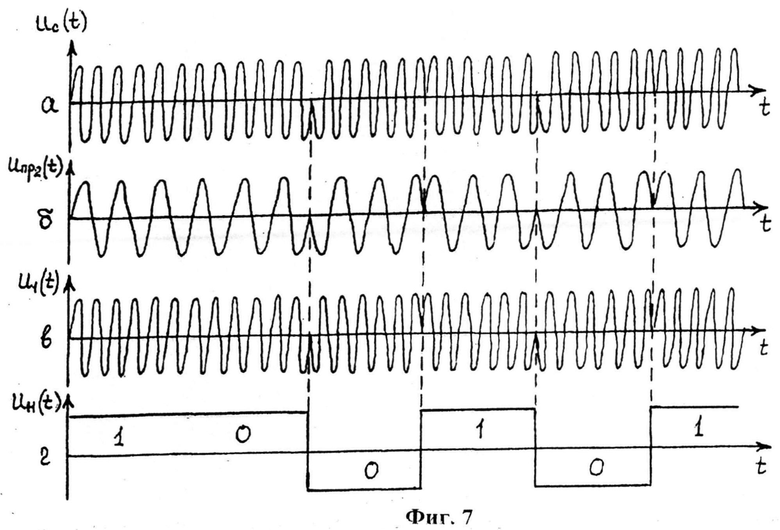
Каждый GPS-спутник излучает на частоте ω2=1575 МГц специальный навигационный сигнал в виде бинарного фазоманипулированного (ФМн) сигнала, манипулированного по фазе псевдослучайной последовательностью длиной 1023 символа (фиг.7, а):
uc(t)=Uccos[ω2t+φk(t)+φ2], 0≤t≤Tc,
где φk(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с псевдослучайной последовательностью длительностью N=1023.
Данный сигнал принимается антенной 1.28 и через усилитель 1.29 мощности поступает на первый вход смесителя 1.30, на второй вход которого подается напряжение гетеродина 1.3
uг2(t)=Uг2cos(ωг2t+φг2).
На выходе смесителя 1.30 образуются напряжения комбинационных частот.Усилителем 1.31 выделяется напряжение второй промежуточной частоты (фиг.7, б)
uпр2(t)=Uпр2cos[ωпр2t+φk(t)+φпр2], 0≤t≤Tc,
где  ;
;
К1 - коэффициент передачи смесителя;
ωпр2=ωг2-ω2 - вторая промежуточная частота;
φпр2=φ2-φг2,
которое поступает на первый вход перемножителя 1.32. На второй вход последнего подается напряжение uг2(t) гетеродина 1.3. На выходе перемножителя образуется напряжение (фиг.7, в)
u1(t)=U1cos[ωг1t+φk(t)+φг1], 0≤t≤Tc,
где  ;
;
К2 - коэффициент передачи перемножителя;
ωг1=ωг2-ωпр2,
которое представляет собой ФМн-сигнал на частоте ωг1 гетеродина 1.2 и поступает на первый (информационный) вход фазового детектора 1.34. На второй (опорный) вход фазового детектора 1.34 в качестве опорного напряжения подается напряжение гетеродина 1.2
uг1(t)=Uг1cos(ωг1t+φг1).
В результате синхронного детектирования на выходе фазового детектора 1.3 образуется низкочастотное напряжение (рис.7, г)
uн(t)=Uнcosφk(t),
где  ;
;
К3 - коэффициент передачи фазового детектора,
Одновременно бинарный ФМн-сигнал uc(t) с выхода усилителя 1.29 мощности через сумматор 3.37, у которого работает только одно плечо, поступает на первый вход селектора 3.38 частоты, на второй вход которого подается напряжение гетеродина 1.2
uГ1(t)=UГ1cos(ωГ1t+φГ1).
В качестве селектора 3.38 частоты может использоваться колебательная система, частота настройки uн1 которой выбирается равной частоте ωГ1 гетеродина 1.2 (ωн1=ωГ1).
При равенстве частот ω2=ωГ2 в колебательной системе (контуре) возникает явление резонанса. Выходное колебание селектора 3.38 частоты выделяется узкополосным фильтром 3.39, детектируется амплитудным детектором 3.40 (U) и поступает на вход порогового блока 3.41, где сравнивается с пороговым напряжением Uпор.
При резонансе выходное напряжение селектора 3.38 частоты достигает максимального значения, напряжение Umax амплитудного детектора 3.40 превышает пороговый уровень Uпор пороговом блоке 3.41 (Umax>Uпор), и только при превышении порогового уровня Uпор в пороговом блоке 3.41 формируется постоянное напряжение, которое поступает на управляющий вход ключа 3.42 и открывает его.
В исходном состоянии ключ 3.42 всегда закрыт. При этом низкочастотное напряжение uH(t) с выхода фазового детектора 1.34 через открытый ключ 3.42 поступает на третий вход бортового контроллера 1.23, где определяется местоположение подвижного объекта (широта и долгота). Для этого достаточно присутствовать в зоне радиовидимости трех спутников. Точность определения местоположения подвижного объекта составляет 50-80 м.
Один из основных методов повышения точности определения местонахождения подвижного объекта и устранения ошибок, связанных с введением режима селективного доступа, основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим позволяет установить координаты транспортного средства с точностью до 5 м в динамической навигационной обстановке и до 2 м в статике.
Бортовой контроллер 1.23, выполненный с возможностью программирования времени между сеансами радиосвязи в зависимости от величины измеренных датчиками 26 параметров. С обусловленной периодичностью (например, 30 мин) через бортовой сегмент спутниковой связи, ИСЗ-ретранслятор и наземный сегмент спутниковой связи передает полученную информацию (местонахождение, протокол событий, техническое состояние, суть внештатной ситуации, если она возникла, а также полную траекторию передвижения за межсеансный промежуток) в наземный центр управления и контроля.
С этой целью задающий генератор 1.24 генерирует высокочастотное колебание (фиг.5, а)
uc1(t)=Uc1cos(ωc1t+φc1), 0≤t≤Tc,
которое поступает на первый вход фазового манипулятора 1.25. На второй вход последнего подается с выхода бортового контроллера 1.23 модулирующий код M1(t) (фиг.5, 6), содержащий информацию о техническом состоянии подвижного объекта и его местоположения. На выходе фазового манипулятора 1.25 формируется сложный ФМн-сигнал (фиг.5, в)
u2(t)=U2cos[ωct+φk(t)+φc], 0≤t≤Tc,
где φk1(t)={0,π} - манипуляционная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5, 6), причем φk1(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t= kτэ, т.е. на границах между элементарными посылками (k=1, 2, …N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью  , который через элемент ИЛИ 1.6 поступает на первый вход первого смесителя 1.7. На второй смеситель 1.7 с выхода первого гетеродина 1.2 подается напряжение uг1(t). Элемент ИЛИ 1.6 обеспечивает очередность поступления на первый вход смесителя 1.7 псевдошумового СВЧ-сигнала с выхода генератора 1.6 и ФМн-сигнала с выхода фазового детектора 1.25. На выходе смесителя 1.7 образуются напряжения комбинационных частот. Усилителем 1.8 выделяется напряжение только первой промежуточной (суммарной) частоты (фиг.5, г)
, который через элемент ИЛИ 1.6 поступает на первый вход первого смесителя 1.7. На второй смеситель 1.7 с выхода первого гетеродина 1.2 подается напряжение uг1(t). Элемент ИЛИ 1.6 обеспечивает очередность поступления на первый вход смесителя 1.7 псевдошумового СВЧ-сигнала с выхода генератора 1.6 и ФМн-сигнала с выхода фазового детектора 1.25. На выходе смесителя 1.7 образуются напряжения комбинационных частот. Усилителем 1.8 выделяется напряжение только первой промежуточной (суммарной) частоты (фиг.5, г)
uпр1(t)=Uпр1cos[ωпр1t+φk1(t)+φпр1], 0≤t≤Тс1,
где  ;
;
ωпр1=ωс+ωг1 - первая промежуточная (суммарная) частота;
φпр1=φс+φг1,
которое после усиления в усилителе 1.9 мощности через дуплексер 1.10 поступает в приемопередающую антенну 1.11, излучается ею в эфир в направлении ИСЗ-ретранслятора, переизлучается им на этой же частоте с сохранением фазовых соотношений, принимается антенной 2.11 наземного центра управления и контроля и через дуплексер 2.10 и усилитель 2.12 мощности поступает на первый вход смесителя 2.13, на второй вход которого подается напряжение uГ1(t) гетеродина 2.3. На выходе смесителя 2.13 образуются напряжения комбинационных частот. Усилителем 2.14 выделяется напряжение второй промежуточной (разностной) частоты (фиг.5, д)
uпр3(t)=Uпр3cos[ωпр2t+φk1(t)+φпр3], 0≤t≤Тс1,
где  ;
;
ωпр2=ωпр1-ωг1 - вторая промежуточная (разностная) частота;
φпр3=φпр1-φг1,
которое поступает на первый вход перемножителя 2.20. На второй вход перемножителя 2.20 подается напряжение uг2(t) гетеродина 2.2. На выходе перемножителя 2.20 образуется напряжение (фиг.5, е)
u3(t)=U3cos[ωг1t-φk1(t)+φг1], 0≤t≤Тс1,
где  ;
;
ωг1=ωпр=ωг2-ωпр2 - промежуточная частота, которое выделяется полосовым фильтром 2.21 и поступает на первый (информационный) вход фазового детектора 2.22. На второй (опорный) вход фазового детектора 2.22 подается напряжение uг1(t) гетеродина 2.3 в качестве опорного напряжения. В результате синхронного детектирования, на выходе фазового детектора 2.22 образуется низкочастотное напряжение (фиг.5, ж)
uн1(t)=Uн1cosφk1(t),
где  ,
,
Одновременно напряжение uпр1(t) с выхода усилителя 2.12 мощности через сумматор 2.37, у которого работает только плечо, поступает на первый вход селектора 2.38 частоты, на второй вход которого подается напряжение гетеродина 2.2
uг2(t)=UГ2cos(ωГ2t+φГ2).
В качестве селектора 2.38 может использоваться колебательная система, частота настройки ωН2 которой выбирается равной частоте ωГ2 гетеродина 2.2 (ωН2=ωГ2).
При равенстве частот ω1=ωГ2 в колебательной системе (контуре) возникает явление резонанса. Выходное колебание селектора 2.38 выделяется узкополосным фильтром 2.39, детектируется амплитудным детектором 2.40 и поступает на вход порогового блока 2.41, где сравнивается с пороговым напряжением Uпор.
При резонансе выходное напряжение селектора 2.38 достигает максимального значения, напряжение Umax амплитудного детектора 2.40 превышает пороговый уровень Uпор в пороговом блоке 2.41 (Umax>Uпор). И только при сравнении порогового уровня Uпор в пороговом блоке 2.41 формируется постоянное напряжение, которое поступает на управляющий вход ключа 2.42 и открывает его. В исходном состоянии ключ 2.42 всегда закрыт.При этом незначительное напряжение uH1(t) с выхода фазового детектора 2.22 через открытый ключ 2.42 поступает на второй вход наземного контроллера 2.93.
По результатам анализа ситуации наземным контроллером 2.23 на наземном центре управления и контроля принимается соответствующее решение, например об отключении неисправного двигателя, или формируется рекомендации экипажу по действиям при развитии нештатных ситуаций.
Для передачи указанных команд в наземном контроллере 2.23 формируется модулирующий код M2(t) (фиг.6,6), который поступает на второй вход фазового манипулятора 2.25. На первый вход последнего подается высокочастотное колебание с выхода задающего генератора 2.24 (фиг.6, а)
uc2(t)=Uc2cos(ωct+φc2), 0≤t≤Tc2.
На выходе фазового манипулятора 2.25 формируется сложный ФМн-сигнал (фиг.6, б)
u4(t)=U4cos[ωct+φki2(t)+φс2], 0≤t≤Тс2,
который через элемент ИЛИ 2.6 поступает на первый вход смесителя 2.7. На второй вход смесителя 2.7 подается напряжение uг2(t) гетеродина 2.2. На выходе смесителя 2.7 образуются напряжения комбинационных частот. Усилителем 2.8 выделяется напряжение промежуточной частоты (фиг.6, г)
u5(t)=U5cos[ωпрt-φk2(t)+φ4], 0≤t≤Тс2,
где  ;
;
ωпр=ωг2-ωс=ω2 - промежуточная частота;
φ4=φс-φг2.
которое после усиления в усилителе 2.9 мощности через дуплексер 2.10 поступает в приемопередающую антенну 2.11, излучается ею в направление ИСЗ-ретранслятора на частоте ω2, переизлучается бортовой аппаратурой ИСЗ-ретранслятора с сохранением фазовых соотношений, принимается антенной 1.11 подвижного объекта и через дуплексер 1.10 и усилитель 1.12 мощности поступает на первый вход смесителя 1.13, на второй вход которого подается напряжение uг2(t) гетеродина 1.3. На выходе смесителя 1.13 образуются напряжения комбинационных частот. Усилителем 1.14 выделяется напряжение второй промежуточной частоты (фиг.6, д)
u6(t)=U6cos[ωпр2t-φk2(t)+φ6], 0≤t≤Тс2,
где  ;
;
ωпр2=ωг2-ω2 - вторая промежуточная частота;
φ6=φ4-φu2,
которое поступает на первый вход перемножителя 1.20. На второй вход последнего подается напряжение uг2(t) гетеродина 1.3. На выходе перемножителя 1.20 образуется напряжение (фиг.6, е)
u7(t)=U7cos[ωпрt+φk2(t)+φ7], 0≤t≤Тс2,
где  ;
;
ωпр=ωг2-ωпр2=ωпр - промежуточная частота;
φ7=φ6-φг2,
которое выделяется полосовым фильтром 1.21 и поступает на первый вход фазового детектора 1.22. На второй (опорный) вход фазового детектора 1.22 подается напряжение uг1(t) в качестве опорного напряжения. В результате синхронного детектирования на выходе фазового детектора 1.22 образуется низкочастотное напряжение (фиг.6, ж)
uн2(t)=Uн2cosφk2(t),
где  ;.
;.
Одновременно напряжение uГ(t) с выхода усилителя 1.12 мощности через сумматор 1.37, у которого работает только одно плечо, поступает на первый вход селектора 1.38 частоты, на второй вход которого подается напряжение гетеродина 1.2
uГ1(t)=UГ1cos(ωГ1t+φГ1).
В качестве селектора 1.38 частоты может использоваться колебательная система, частота настройки ωН1 которой выбирается равной частоте ωГ1 гетеродина 1.2 (ωН1=ωГ1)
При равенстве частот ω2=ωГ1 в колебательной системе (контуре) возникает явление резонанса. Выходное колебание селектора 1.38 частоты выделяется узкополосным фильтром 1.39, детектируется амплитудным детектором 1.40 (U) и поступает на вход порогового блока 12.41, где сравнивается с пороговым напряжением Uпор.
При резонансе выходное напряжение селектора 1.38 частоты достигает максимального значения, напряжение Umax амплитудного детектора 1.40, превышает пороговый уровень Uпор (Umax>Uпор) в пороговом блоке 1.41. И только при превышении порогового уровня Uпор в пороговом блоке 1.41 формируется состояние напряжение, которое поступает на управляющий вход ключа 1.42 и открывает его. В исходном состоянии ключ всегда закрыт.При этом низкочастотное напряжение uH2(t) с выхода фазового детектора 1.22 через открытый ключ 1.42 поступает на четвертый вход бортового контроллера 1.23, где реализуются команды и рекомендации наземного центра управления и контроля.
В случае соответствия всех измеренных датчиками 26 параметров условиям нормальной эксплуатации подвижного объекта, а места нахождения подвижного объекта - плановому месту нахождения, передача дискретной информации с борта подвижного объекта в наземный центр управления и контроля происходит с заданной периодичностью (например, один раз в 30 мин).
При превышении хотя бы одного из измеренных параметров заданного уровня или отклонения места нахождения подвижного объекта от планового места нахождения, период между передачами сокращается.
При создании аварийной ситуации дискретную информацию с борта подвижного объекта передают непрерывно.
Режим передачи дискретной информации бортовым контроллером 1.23 может быть также изменен решением командного состава подвижного объекта или наземным центром управления и контроля.
При возвращении контролируемых параметров к допустимым значениям, а также соответствия места нахождения подвижного объекта плановому месту нахождения, период между передачей дискретной информации будет снова увеличен.
Описанная выше работа системы, реализующей предлагаемый способ, соответствующей случаю приема полезных ФМн-сигналов по основным каналам на частотах ω1 и ω2 (фиг.2).
Если ложный сигнал (помеха) принимается по первому зеркальному каналу на частоте ωЗ1
uЗ1(t)=UЗ1cos(ωЗ1t+φЗ1), 0≤t≤ТЗ1,
то с выхода усилителя 2.12 мощности через сумматор 2.37, у которого работает только одно плечо, он поступает на первый вход селектора 2.38 частоты, частота на стройки ωН2 которого выбирается равной частоте ωГ2 гетеродина 2.2 (ωН2=ωГ2). Частоты ωГ2 и ωЗ1 разнесены на удвоенное значение второй промежуточной частоты ωГ2-ωЗ1 =2ωпр2. Поэтому в селекторе 2.38 частоты явление резонанса не наступает, выходное напряжение U амплитудного детектора 2.40 не превышает порогового уровня Uпор в пороговом блоке 2.41 (U<Uпор). Ключ 2.42 не открывается и ложный сигнал (помеха), принимаемый по первому зеркальному каналу на частоте ωЗ1, подавляется. Для этого используются резонансные свойства селектора 2.38 частоты, выполненного в виде колебательного контура с частотой настройки ωН2=ωГ2.
Если ложный сигнал (помеха) принимается по второму зеркальному каналу на частоте ωЗ2
uЗ2(t)=U2cos(ωt+φ2), 0≤t≤T,
то с выхода усилителя 1.12 (1.29) мощности через сумматор 1.37(2.37), у которого работает только одно плечо, он поступает на первый вход селектора 1.38 (3ю38) частоты, частота настройки ωН1 которого выбирается равной частоте ωГ1 гетеродина 1.2 (ωН1=ωГ1). Частоты ωГ1 и ωЗ2 разнесены на удвоенное значение второй промежуточной частоты ωГ2-ωГ1=2ωпр2.
Поэтому в селекторе 1.38 (3.38) частоты явление резонанса не наступает, выходное напряжение U амплитудного детектора 1.40 (3.40) не превышает порогового уровня Uпор в пороговом блоке 1.41 (3.41) (U<Uпор). Ключ 1.42 (3.42) не открывается и ложный сигнал (помеха), принимаемый по второму зеркальному каналу на частоте ωЗ2, подавляется. Для этого используются резонансные свойства селектора 1.38 (3.38) частоты, выполненного в виде колебательного контура, с частотой настройки ωН1=ωГ1.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемых по другим дополнительным (первому ωk1, второму ωk2, третьему каналам ωk3 и четвертому ωk4 комбинационным) каналам.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на частоте ωП=ωпр2
uП(t)=UПcos(ωПt+φП), 0≤t≤ТП,
то с выхода усилителя 1.12 (2.12, 1.29) он поступает на первый вход сумматора 1.37 (2.37, 3.37) и на вход узкополосного фильтра 1.35 (2.35, 3.35), частота настройки ωН3 которого выбирается равной второй промежуточной частоты (ωН3=ωпр2). Указанный сигнал (помеха) выделяется узкополосным фильтром 1.35 (2.35, 3.36) и подается на вход фазоинвертора 1.36 (2.36, 3.36), на выходе которого образуется напряжение
uП1(t)=-UПcos(ωПt+φП), 0≤t≤TП,
Напряжения uп(t) и uп1(t), поступающие на два входа сумматора 1.37 (2.37, 3.37), на его выходе компенсируется.
Следовательно ложный сигнал (помеха) принимаемый по каналу прямого прохождения на частоте ωП=ωпр2 подавляется с помощью фильтра - пробки, состоящего из узкополосного фильтра 1.35 (2.35, 3.35), фазоинвертора 1.36 (2.36,3.36), сумматора 1.37 (2.37, 3.37) и реализующим фазокомпенсационный метод.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивают повышение избирательность, помехоустойчивость и надежность дуплексной радиосвязи между центром управления и контроля и подвижными объектами. Это достигается путем подавления ложных сигналов (помех), принимаемых по первому ωЗ1 и второму ωЗ2 зеркальным каналам, по первому ωК1, второму ωК2, третьему ωK3 и четвертому ωК4 комбинационному каналам и по каналу прямого прохождения на частоте ωП=ωпр2. Причем для подавления ложных сигналов
(помех), принимаемых по зеркальным и комбинационным каналам, используются селекторы частоты, выполненные в виде колебательных контуров и реализующие явление резонанса.
Следует отметить, что явление резонанса является основополагающим принципом работы многих систем и устройств радиоэлектроники.
Для подавления ложных сигналов (помех), принимаемых по каналу прямого прохождения, используются фильтр-пробки, состоящие из узкополосных фильтров, фазоинверторов, сумматоров и реализующие фазокомпенсационный метод.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДЕМ СИГНАЛОВ ПЕРЕДАЧИ ВРЕМЕНИ ПО ДУПЛЕКСНОМУ КАНАЛУ СПУТНИКОВОЙ СВЯЗИ | 2016 |
|
RU2623718C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2017 |
|
RU2654846C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2006 |
|
RU2310221C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| Способ материально-технического обеспечения управления местоположением транспортного средства при восстановлении объектов инфраструктуры и система для его реализации | 2019 |
|
RU2724079C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2005 |
|
RU2292574C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2670334C1 |


Изобретение предназначено для сличения шкал времени, разнесенных на большие расстояния и размещенных на транспортных средствах и наземном пункте управления и контроля, а также может быть использовано для дистанционного контроля технического состояния транспортного средства и его местоположения на наземном пункте управления и контроля. Изобретение направлено на повышение избирательности, помехоустойчивости и надежности дуплексной связи между пунктом управления и контроля и подвижными объектами путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам, что обеспечивается за счет того, что аппаратура подвижного объекта центра управления и контроля, реализующая способ согласно изобретению, содержит стандарт частоты и времени, два гетеродина, генератор псевдошумового сигнала, переключатель, элемент ИЛИ, два смесителя, усилитель первой промежуточной частоты, два усилителя мощности, дуплексер, приемопередающую антенну, усилитель второй промежуточной частоты, первый и второй клиперы, первое и второе буферное запоминающее устройство, измеритель задержек и их производных, перемножитель, полосовой фильтр, фазовый детектор, бортовой контроллер, задающий генератор, фазовый манипулятор, датчики, характеризующие техническое состояние подвижного объекта, бортовой регистратор, приемную антенну, усилитель мощности, смеситель, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр, фазовый детектор, первый узкополосный фильтр, фазоинвертор, сумматор, селектор частоты, второй узкополосный фильтр, амплитудный детектор, пороговый блок, ключ. 8 ил.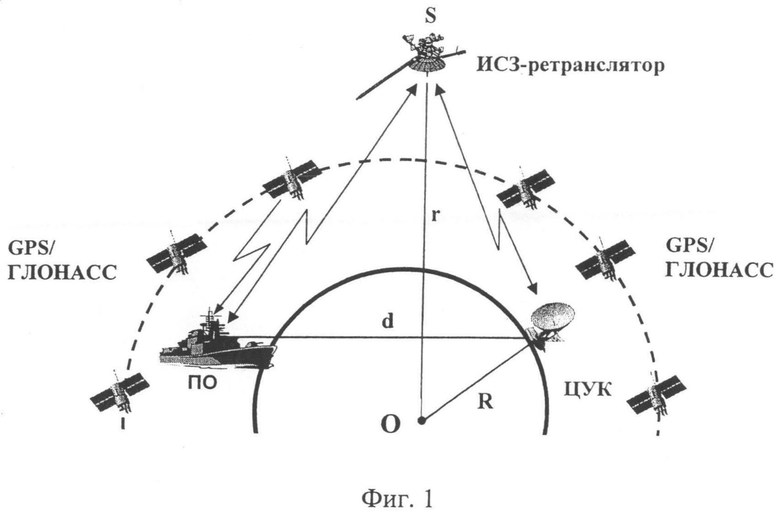
Способ сличения шкал времени основан на одновременном приеме разнесенными пунктами шумовых СВЧ-сигналов с борта искусственного спутника Земли, когерентном их преобразовании к видеочастоте, цифровой регистрации принятых сигналов и определении временной задержки прихода одного и того же сигнала в пункты синхронизации методом корреляционной обработки зарегистрированных сигналов, по величине которой производят сличение шкал времени, при этом в начальный момент времени t1 по часам первого пункта с помощью кодовой последовательности формируют шумовой СВЧ-сигнал, регистрируют его на этом же пункте, сформированный сигнал преобразуют в сигнал с частотой ω1, усиливают его по мощности, излучают усиленный сигнал в направлении на искусственный спутник Земли - ретранслятор, в тот же момент времени t1 по часам второго пункта с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал, регистрируют его на втором пункте, принимают бортовой аппаратурой искусственного спутника Земли-ретранслятора сигнал на частоте ω1, переизлучают его на первый и второй пункты на частоте ω2 с сохранением фазовых соотношений, в произвольный момент времени t3 по часам второго пункта аналогично формируют и ретранслируют шумовой СВЧ-сигнал, сформированный сигнал преобразуют в сигнал на частоте ω1, усиливают его по мощности, излучают усиленный сигнал в направлении того же искусственного спутника Земли-ретранслятора, в тот же момент времени t3 по часам первого пункта с помощью той же кодовой последовательности формируют такой же шумовой СВЧ-сигнал, регистрируют его на первом пункте, принимают бортовой аппаратурой искусственного спутника Земли-ретранслятора сигнал на частоте ω1 и переизлучают его на первый и второй пункты на частоте ω2 с сохранением фазовых соотношений, первый пункт размещают на подвижном объекте, в качестве которого используют космическое, воздушное, водное или наземное транспортное средство, а второй наземный пункт используют в качестве центра управления и контроля, координаты которого определяют в результате прецизионной геодезической съемки, на подвижном объекте измеряют параметры, определяющие его техническое состояние, регистрируют их и преобразуют в модулирующий код, генерируют высокочастотное колебание на частоте ωс, манипулируют его по фазе модулирующим кодом, сформированный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием напряжения первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωс+ωГ1, где ωГ1 - частота первого гетеродина, усиливают его по мощности, излучают усиленный сигнал в направлении на искусственный спутник Земли-ретранслятор, переизлучают его в центр управления и контроля на частоте ω1=ωпр1=ωГ2, где ωГ2 - частота второго гетеродина, с сохранением фазовых соотношений, принимают сложный сигнал с фазовой манипуляцией в центре управления и контроля, усиливают его по мощности, преобразуют по частоте с использованием первого гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ω1-ωГ1=ωс, перемножают его с напряжением второго гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωГ1 первого гетеродина, осуществляют его синхронное детектирование с использованием напряжения первого гетеродина в качестве опорного напряжения, выделяют низкочастотное напряжение, пропорциональное модулирующему коду, и анализируют его, аналогично осуществляют передачу дискретной информации из центра управления и контроля на подвижный объект, при этом на подвижном объекте сложные сигналы с фазовой манипуляцией излучают на частоте ω1, а принимают на частоте ω2, а в центре управления и контроля сложные сигналы с фазовой манипуляцией излучаю на частоте ω2, а принимают на частоте ω1, одновременно на подвижном объекте принимают GPS-сигнал на частоте ω2, усиливают его по мощности, преобразуют по частоте с использованием напряжения второго гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωГ2-ω2, перемножают его с напряжением второго гетеродина, выделяют GPS-сигнал на частоте ωГ1 первого гетеродина, осуществляют его синхронное детектирование с использованием частоты ωГ1 первого гетеродина, выделяют низкочастотное напряжение, в случае соответствия всех измеренных параметров условно нормальной эксплуатации подвижного объекта, а местонахождение подвижного объекта - плановому местонахождению, передачу дискретной информации с борта подвижного объекта в наземный центр управления и контроля осуществляют с заданной периодичностью, при превышении хотя бы одного из измеренных параметров заданного уровня или отклонения от местонахождения подвижного объекта от планового местонахождения, период между передачами сокращают, причем при создании аварийной ситуации дискретную информацию передают с борта подвижного объекта непрерывно, при возвращении контролируемых параметров к допустимым значениям, а также соответствия местонахождения подвижного объекта плановому местонахождению, период между передачей дискретной информации снова увеличивают, отличающийся тем, что на подвижном объекте и в центре управления и контроля принятый и усиленный по мощности сигнал подают на колебательную систему, частота настройки которой равна частоте первого гетеродина, при возникновении явления резонанса выделяют амплитуду резонансного колебания, сравнивают ее с пороговым уровнем и в случае превышения разрешают дальнейшую обработку низкочастотного напряжения, на подвижном объекте и в центре управления и контроля при поступлении ложного сигнала (помехи) на второй промежуточной частоте ωпр2, выделяют его, инвертируют по фазе на 180° и суммируют с принимаемым ложным сигналом (помехой), компенсируя его.
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| Устройство для сличения эталонов времени | 1989 |
|
SU1741096A1 |
| US 7333467 B2, 19.02.2008. | |||

