Область техники
Настоящее изобретение относится к скважинной системе, способу проведения испытаний в скважинном инструменте и оборудованию для тестирования и регулирования скважинного инструмента
Предшествующий уровень техники
Для добычи углеводородов из скважины используются промышленные поднимающие механизмы с насосами. Одним типом насоса является электрический погружной насос, который может работать на разных частотах. Электрический погружной насос может управляться системой привода с переменной скоростью, что позволяет менять рабочую частоту электрического погружного насоса.
Желательно, чтобы электрический погружной насос не работал на своей резонансной частоте, поскольку может возникнуть нежелательная вибрация, когда электрический погружной насос работает на резонансной частоте. Резонансная частота объекта является естественной частотой вибрации объекта, определяемой физическими параметрами объекта.
Обычно для определения резонансной частоты электрического погружного насоса выполняется ручная процедура. Ручная процедура включает в себя управление системой привода с переменной частотой (обычно расположенной на поверхности земли) для выполнения качания частоты электрического погружного насоса. Вибрация электрического погружнсго насоса контролируется оператором скважины путем качания частоты. Обычно частота, ассоциированная с наибольшей величиной вибрации, считается резонансной частотой, которая регистрируется оператором скважины, проводящим испытание. Система привода с переменой частотой затем настраивается вручную для пропуска резонансной частоты во время нормальной работы электрического погружного насоса.
Такое ручное испытание электрического погружного насоса требует много времени и интенсивного труда, что увеличивает стоимость оборудования для закачивания скважины.
Известен способ управления колебаниями в буровом оборудовании, приводимом в действие приводом в процессе бурения (см., например, RU 2087701, 20.08.1997), заключающийся в том, что измеряют колебания поперечной и продольной переменных, по произведению которых определяют поток энергии через буровое оборудование, и регулируют крутильные колебания оборудования путем поддерживания потока энергии через буровое оборудование на заданном уровне. Продольную и поперечную переменные измеряют на приводе, по измеренным продольной и поперечной переменным определяют крутящий момент приводного двигателя и поддерживают поток энергии на заданном уровне путем регулирования крутящего момента приводного двигателя.
В качестве приводного двигателя используют электродвигатель, при этом в качестве продольной переменной выбирают величину тока, проходящего через электродвигатель, а в качестве поперечной переменной величину напряжения на электродвигателе.
Либо в качестве поперечной переменной выбирают величину скорости вращающейся детали привода, а в качестве продольной переменной крутящий момент, передаваемый указанной вращающейся деталью привода.
Таким образом, сущность известного способа заключается в том, что колебания в буровом оборудовании регулируются посредством определения потока энергии через оборудование как произведение «поперечной» переменной и «сквозной» переменной. Причем колебания одной переменной измеряются, а поток энергии регулируется путем регулирования другой переменной в ответ на измеряемые колебания упомянутой одной переменной. В качестве переменных величин для определения потока энергии используются напряжение, умноженное на ток электрического привода, давление, умноженное на скорость потока гидравлического привода, или крутящий момент, умноженный на угловую скорость вращательного привода. Способ реализуется системой, содержащей средства измерения колебаний продольной и поперечной переменной, связанные со средством контроля истока энергии через буровое оборудование, и средство регулирования крутильных колебаний оборудования путем поддержания потока энергии через буровое оборудование на заданном уровне.
Сущность изобретения
Задача, решаемая изобретением, заключается в создании устройства и способа для автоматического определения резонансной частоты скважинной системы, позволяющих уменьшить время определения резонансной частоты и снизить стоимость оборудования.
Поставленная задача решена путем создания скважинной системы, содержащей скважинный инструмент для работы на множестве рабочих частот, систему привода для управления рабочей частотой скважинного инструмента и контроллер для управления системой привода для изменения рабочей частоты скважинной системы и для автоматического определения резонансной частоты скважинной системы при испытаниях.
Предпочтительно контроллер предназначен для дополнительной установки определенной резонансной частоты в качестве частоты, которую следует избегать в системе привода.
Предпочтительно контроллер предназначен для установки обнаруженной резонансной частоты, которую следует избегать, путем установки резонансной частоты в качестве частоты скачка в системе привода.
Целесообразно, чтобы контроллер содержал центральный процессор и программное обеспечение для выполнения на центральном процессоре, предназначенное для выполнения задач управления и определения.
Предпочтительно скважинная система содержит насос, предназначенный для работы на множестве рабочих частот.
Целесообразно, чтобы насос был выполнен электрическим погружным.
Целесообразно, чтобы устройство дополнительно содержало датчик вибрации для определения вибрации скважинной системы во время испытаний, контроллер для приема данных от датчика вибрации для определения резонансной частоты.
Предпочтительно контроллер предназначен для выполнения испытаний путем изменения рабочей частоты скважинной системы в пределах заданного диапазона частот.
Целесообразно, чтобы устройство дополнительно содержало, по меньшей мере, одну пользовательскую станцию и локальный пользовательский интерфейс контроллера для отображения результата испытаний.
Поставленная задача решена также путем создания способа проведения испытаний в скважинном инструменте, размещенном в стволе скважины, заключающемся в том, что изменяют в ответ на сигнал управления управляющего модуля рабочую частоту скважинного инструмента в пределах заранее определенного диапазона частот при испытаниях, принимают в управляющем модуле данные вибрации скважинного инструмента по мере изменения рабочей частоты скважинного инструмента в пределах заранее определенного диапазона частот, автоматически определяют посредством управляющего модуля резонансную частоту скважинного инструмента на основании данных вибрации.
Предпочтительно дополнительно отображают результат испытаний на пользовательском интерфейсе.
Предпочтительно дополнительно устанавливают в системе привода, которая управляет рабочей частотой скважинного инструмента, частоту, которую следует избегать, на основании определенной резонансной частоты.
Целесообразно, чтробы при изменении рабочей частоты скважинного инструмента изменяли рабочую частоту электрического погружного насоса.
Целесообразно, чтобы при приеме данных о вибрации скважинного инструмента принимали данные о вибрации от датчика вибрации в скважинном инструменте.
Предпочтительно дополнительно получают минимальную рабочую частоту и максимальную рабочую частоту, которые определяют заранее определенный диапазон частот.
Предпочтительно дополнительно генерируют максимальную рабочую частоту на основании, по меньшей мере, частичной информации о скорости потока или информации о давлении от одного или более датчиков в скважинном инструменте.
Поставленная задача решена также путем создания оборудования для тестирования и регулирования скважинного инструмента, содержащего, по меньшей мере, один носитель информации, включающий инструкции, предназначенные для выполнения управляющим модулем: управления системой привода для изменения рабочей частоты скважинного инструмента в пределах заранее определенного диапазона частот во время испытаний; определения резонансной частоты скважинного инструмента на основании информации, принятой из скважинного устройства во время испытаний, по мере изменения рабочей частоты скважинного инструмента в пределах заранее определенного диапазона частот.
Предпочтительно носитель информации содержит также инструкцию для выполнения управляющим модулем: обеспечения дополнительного приема управляющим модулем данных о вибрации от датчика вибрации скважинного инструмента и определения при этом резонансной частоты скважинного инструмента на основании данных о вибрации.
Предпочтительно носитель информации содержит также инструкцию для выполнения управляющим модулем: дополнительного генерирования максимальной рабочей частоты заранее заданного диапазона частот, при этом максимальная рабочая частота основана на информации о скорости потока или информации о давлении, получаемой от одного или более датчиков скважинного инструмента.
Целесообразно, чтобы генерирование максимальной рабочей частоты дополнительно было основано на информации о потребляемой энергии скважинного инструмента.
Предпочтительно носитель информации содержит также инструкцию для выполнения управляющим модулем: управления системой привода для изменения рабочей частоты скважинного инструмента посредством управления системой привода для изменения рабочей частоты насосного устройства.
В общем, скважинная система (например, электрический погружной насос) может работать на множестве частот, и система привода управляет рабочей частотой скважинной системы. Контроллер управляет системой привода, чтобы при испытаниях изменять частоту скважинной системы и автоматически обнаруживать резонансную частоту скважинной системы при испытаниях. Контроллер также способен устанавливать обнаруженную резонансную частоту в качестве рабочей частоты, которую следует избегать.
Другие или альтернативные признаки поясняются описанием, чертежами и формулой изобретения.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых
Фиг.1 изображает систему с насосом, расположенным в стволе скважины, и наземным приводом переменной частоты, а также систему управления, имеющую модуль для определения резонансной частоты насоса, согласно изобретению;
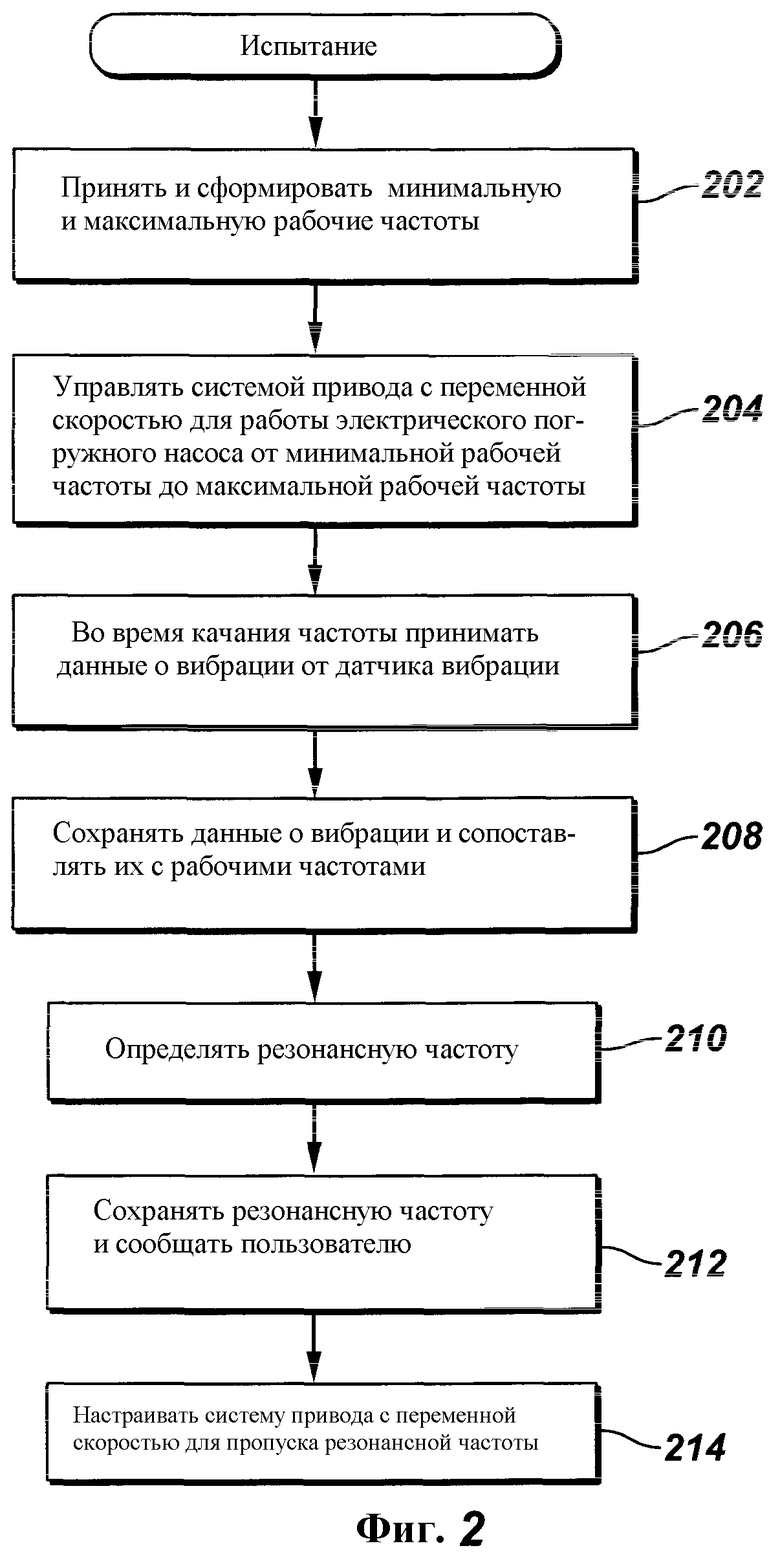
Фиг.2 - блок-схему последовательности операций определения резонансной частоты насоса согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
В нижеследующем описании изложены предпочтительные варианты воплощения для обеспечения понимания настоящего изобретения. Однако специалисты в данной области техники должны понимать, что настоящее изобретение может быть модифицировано относительно описанных вариантов осуществления.
В описании используются термины «верх» и «низ», «верхний» и «нижний», «вверху» и «внизу», «вверх по потоку» и «вниз по потоку», «выше» и «ниже» и другие, означающие относительные положения выше или ниже данной точки или элемента для более ясного понимания некоторых вариантов осуществления изобретения. Однако применительно к оборудованию или способам для использования в скважинах, которые являются отклоненными или горизонтальными, такие термины могут означать слева направо, справа налево или другое подходящее отношение.
На фиг.1 представлена система, содержащая колонну, размещенную в стволе 100 скважины, причем колонна имеет насосную установку 102, которая спускается в скважину на насосно-компрессорной трубе 104. В одном варианте осуществления насосная установка 102 является электрической погружной насосной (ЭПН) установкой, которая управляется электрически для выкачивания флюидов по стволу 100 скважины вверх на поверхность 101 скважины или земли. Электрическая погружная насосная установка 102 является примером скважинной системы, которая способна работать на различных рабочих частотах. В других вариантах осуществления изобретения другие типы скважинных систем также способны работать на различных рабочих частотах. Вместо насосно-компрессорной трубы 104 другие типы передающих структур могут быть использованы для опускания системы в ствол 100 скважины, например канаты, гибкие трубы, кабели и так далее.
Ствол 100 скважины облицован обсадной колонной или футеровкой 106, которая выступает над поверхностью 101 скважины. Оборудование 124 устья скважины размещено на поверхности 101. Ввод 122 устья скважины предусмотрен через оборудование 124 устья скважины для передачи электроэнергии из наземной системы 130 привода с переменной скоростью в погружную насосную установку 102 через оборудование 124 устья скважины.
В соответствии с вариантом воплощения электрическая погружная насосная установка 102 содержит насос 108, привод 114 для питания насоса 108, предохранитель 116 для предотвращения проникновения скважинного флюида в привод и входной газовый сепаратор 112, через который скважинный флюид поступает в насос 108. Также электрическая погружная насосная установка 102 может включать в себя газообрабатывающее устройство 110 для обработки некоторого количества газа, которое не может быть обработано погружным насосом, скважинный модуль 118 датчиков (подсоединенный к соответствующим преобразователям) для получения показаний давления, температуры, скорости потока, тока и/или вибрации, связанный со стволом 100 скважины, и погружную насосную установку 102. Элементы электрической погружной насосной установки 102 приведены в качестве примера, при этом другие насосные установки могут содержать другие элементы.
Привод 114 подсоединен к электрическому кабелю 120, который проходит через оборудование 124 устья скважины. Кабель 120 дополнительно выходит из оборудования 124 устья скважины в управляющий модуль 126 на поверхности 101 скважины.
Управляющий модуль 126 содержит контроллер 128 и систему 130 привода с переменной скоростью. Следует отметить, что другие элементы (не показаны) могут также быть частью управляющего модуля 126. Система 130 привода с переменной скоростью управляет скоростью, с которой работает привод 114. Управление скоростью оказывает влияние на рабочую частоту электрической погружной насосной установки 102. Система 130 привода с переменной скоростью подсоединена к контроллеру 128, который управляет (среди прочего) изменением скорости посредством системы 130 привода с переменной скоростью. Система 130 привода с переменной скоростью также обеспечивает защитные функции для погружной насосной установки 102.
В соответствии с вариантом осуществления изобретения контроллер 128 содержит программное обеспечение 134 для определения резонансной частоты, которое выполняется центральным процессором (ЦП) 136. ЦП 136 подсоединен к памяти 138 для хранения данных и инструкций программного обеспечения. Программное обеспечение 134 для определения резонансной частоты обеспечивает механизм для автоматического обнаружения резонансной частоты электрической погружной насосной установки 102 (или другого типа скважинного инструмента, который способен работать на многих частотах). Используя программное обеспечение 134 для определения резонансной частоты в контроллере 128, оператор скважины может автоматизировать процедуру определения резонансной частоты, так что он не осуществляет ручного определения резонансной частоты и настройки системы 130 привода с переменной скоростью для такой резонансной частоты. Программное обеспечение 134 для определения резонансной частоты работает с электрической погружной насосной установкой 102, которое включает в себя модуль датчиков, который позволяет измерять вибрацию в любой точке погружной насосной установки 102.
В соответствии с другими вариантами осуществления изобретения программное обеспечение 134 для определения резонансной частоты может быть использовано для определения резонансной частоты электрической погружной насосной установки 102 и для автоматической установки одной из резонансных частот, которые система 130 привода с переменной скоростью должна пропустить, называемой «установка частоты скачка».
Пользовательская станция 132 может быть подсоединена к управляющему модулю 126. Используя пользовательскую станцию 132, например ноутбук, настольный компьютер, персональный цифровой помощник (PDA) или другое пользовательское устройство, пользователь (например, оператор скважины) может запускать выполнение программы 134 для определения резонансной частоты и просматривать результаты выполнения программного обеспечения 134 для определения резонансной частоты. Также пользователь может контролировать работу электрической погружной насосной установки 102. Все это может быть выполнено с использованием локального пользовательского интерфейса на управляющем модуле 126.
В варианте осуществления пользовательская станция 132 содержит пользовательский интерфейс, который отображает элементы управления для управления программным обеспечением 134 для обнаружения резонансной частоты. Пользовательский интерфейс также отображает поля для вывода результатов испытаний, осуществляемых по программе 134 для определения резонансной частоты электрической погружной насосной установки 102. В некоторых случаях пользовательский интерфейс в пользовательской станции 132 может быть использован для управления системой 130 привода с переменной скоростью.
Программное обеспечение 134 для определения резонансной частоты является примером модуля для автоматического определения резонансной частоты скважинной системы, такой как электрическая погружная насосная установка 102. В других вариантах осуществления вместо модуля программного обеспечения может быть использован модуль, реализованный в оборудовании и программно-аппаратных средствах, для автоматизированного определения резонансной частоты.
В соответствии с вариантом осуществления для тестирования для определения резонансной частоты с помощью программного обеспечения 134 в электрической погружной насосной установке 102 предусмотрен скважинный модуль 118 датчиков. Скважинный модуль 118 датчиков подсоединен к кабелю 120 через привод 104, при этом один или более преобразователей могут быть расположены в любой точке электрической погружной насосной установки 102.
Как показано на Фиг.2, для выполнения тестирования программное обеспечение 134 для определения резонансной частоты используется для получения или генерации (на этапе 202) минимального и максимального значений рабочей частоты, которые определяют частотный диапазон, в котором должно выполняться качание частоты в испытательной процедуре. Минимальная и максимальная рабочие частоты могут быть введены пользователем на пользовательской станции 132 или с помощью пользовательского интерфейса контроллера 128. Например, пользовательский интерфейс, представленный программным обеспечением 134 для определения резонансной частоты, может иметь поля для приема различных параметров, включающих в себя минимальную и максимальную рабочие частоты.
В качестве альтернативы минимальная и максимальная рабочие частоты могут генерироваться программным обеспечением 134 на основании различных данных, связанных с электрической погружной насосной установкой 102. Например, электрическая погружная насосная установка 102 может быть связана с номинальными данными привода, включая максимальную мощность привода 114 и номинальную частоту привода. Номинальная частота привода составляет обычно 50 Гц или 60 Гц в зависимости от частоты источника энергии. Максимальная частота для качания частоты выводится с использованием следующего уравнения:

Потребление энергии на номинальной частоте привода относится к ожидаемому потреблению энергии насосом 108, газообрабатывающим устройством 110 (если имеется) и входным газовым сепаратором 112, приводимыми в движение приводом на номинальной частоте. Потребление энергии на номинальной частоте привода может быть введено пользователем (через пользовательскую станцию 132) или может быть получено из другой информации, такой как информация о давлении или скорости потока, от преобразователей, расположенных на электрической погружной насосной установке 102.
После получения или формирования (на этапе 202) минимальной и максимальной рабочих частот на установке 102 программное обеспечение 134 для определения резонансной частоты заставляет (на этапе 204) контроллер 128 управлять системой 130 привода с переменной скоростью для работы электрической погружной насосной установки 102 на частотах от минимальной рабочей частоты до максимальной рабочей частоты. Во время этого качания частоты программное обеспечение 134 для определения резонансной частоты принимает (на этапе 206) от датчика данные о вибрации.
Данные о вибрации сохраняются (на этапе 208) и сравниваются с рабочими частотами. Например, данные о вибрации и соответствующие рабочие частоты могут храниться в табличном формате. На основании принятых данных о вибрации программное обеспечение 134 определяет (на этапе 210) резонансную частоту, которая является частотой, на которой обнаруживается максимальная вибрация (из данных о вибрации).
Определенная резонансная частота затем сохраняется (на этапе 212) и в некоторых случаях сообщается пользователю на пользовательскую станцию 132. Также контроллер 128 на основании резонансной частоты, определенной программным обеспечением 134, настраивает (на этапе 214) систему 130 привода с переменной скоростью для пропуска резонансной частоты. Например, система 130 привода с переменной скоростью может быть связана с частотой скачка или частотами скачка, который или которые должны быть пропущены во время работы.
Инструкции программного обеспечения 134 для определения резонансной частоты хранятся в одном или нескольких запоминающих устройствах в контроллере 128 и загружаются для выполнения в процессор (например, ЦП 136). Процессор включает в себя микропроцессоры, микроконтроллеры, процессорные модули или подсистемы (включая один или более микропроцессоров или микроконтроллеров) или другие управляющие или вычислительные устройства. «Управляющий модуль» означает оборудование, программное обеспечение или их сочетание. «Управляющий модуль» может означать один элемент или множество элементов (либо программное обеспечение, или оборудование).
Данные и инструкции (программного обеспечения) хранятся в соответствующих запоминающих устройствах, которые реализованы в виде одного или более машиночитаемых носителей. Носитель включает в себя различные формы памяти, включая устройства полупроводниковой памяти, такие как динамические или статические устройства памяти с произвольным доступом (DRAM или SRAM), стираемые или программируемые устройства памяти только для чтения (EPROM), электрически стираемые или программируемые устройства памяти только для чтения (EEPROM) и флэш-память; магнитные диски, такие как жесткие, гибкие и съемные диски; другие магнитные носители, включая ленту; и оптические носители, такие как компакт-диски (CD) или цифровые видеодиски (DVD).
Изобретение было раскрыто со ссылкой на ограниченное количество вариантов осуществления, однако специалистам в данной области техники очевидны многочисленные изменения и вариации. Предполагается, что прилагаемая формула изобретения охватывает изменения и вариации, попадающие в сущность и объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ЖИДКОСТИ В СКВАЖИННОМ ИНСТРУМЕНТЕ | 2008 |
|
RU2470153C2 |
| СИСТЕМА ГИДРАВЛИЧЕСКОГО НАСОСА ДЛЯ СКВАЖИННОГО ИНСТРУМЕНТА (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ УКАЗАННЫМ НАСОСОМ И СПОСОБ ЭКСПЛУАТАЦИИ НАСОСНОЙ СИСТЕМЫ ДЛЯ СКВАЖИННОГО ИНСТРУМЕНТА | 2007 |
|
RU2442021C2 |
| СПОСОБ УПРАВЛЕНИЯ ВИБРАЦИЯМИ СКВАЖИННОГО ИНСТРУМЕНТА И ОБОРУДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2705852C1 |
| СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ СКВАЖИННОГО ИЗМЕРИТЕЛЬНОГО ПРИБОРА ПИТАНИЕМ ПЕРЕМЕННЫМ ТОКОМ | 2008 |
|
RU2465456C2 |
| УПРАВЛЕНИЕ КРУТИЛЬНЫМИ КОЛЕБАНИЯМИ С ПРИМЕНЕНИЕМ ВЕСА | 2018 |
|
RU2768770C2 |
| Скважинное компрессорное устройство для обработки влажного газа | 2015 |
|
RU2674479C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ АВТОМАТИЧЕСКАЯ ЦИФРОВАЯ ИНТЕЛЛЕКТУАЛЬНАЯ СКВАЖИНА | 2018 |
|
RU2689103C1 |
| Система и способ управления разработкой месторождения с использованием электрических погружных насосов в качестве виртуальных датчиков | 2015 |
|
RU2708303C2 |
| СВЯЗЬ НА МЕСТЕ В РЕАЛЬНОМ ВРЕМЕНИ ЧЕРЕЗ ИНТЕРНЕТ С ДИСПЕТЧЕРОМ СКВАЖИНЫ ДЛЯ ПОСТОЯННОЙ ОПТИМИЗАЦИИ СКВАЖИНЫ | 2008 |
|
RU2510971C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ФИЗИЧЕСКОГО СОСТОЯНИЯ ЭКСПЛУАТАЦИОННОГО ОБОРУДОВАНИЯ СКВАЖИНЫ И РЕГУЛИРОВАНИЯ ДЕБИТА СКВАЖИНЫ | 2008 |
|
RU2468191C2 |
Изобретения относятся к оборудованию для автоматического детектирования резонансной частоты скважинной системы. Скважинная система содержит скважинный инструмент, предназначенный для работы на множестве частот, систему привода для управления рабочей частотой скважинного инструмента и контроллер для управления системой привода для изменения при испытаниях рабочей частоты скважинного инструмента. Контроллер автоматически определяет резонансную частоту скважинного инструмента. Изобретения направлены на уменьшение времени определения резонансной частоты и снижение стоимости оборудования. 3 н. и 18 з.п. ф-лы, 2 ил.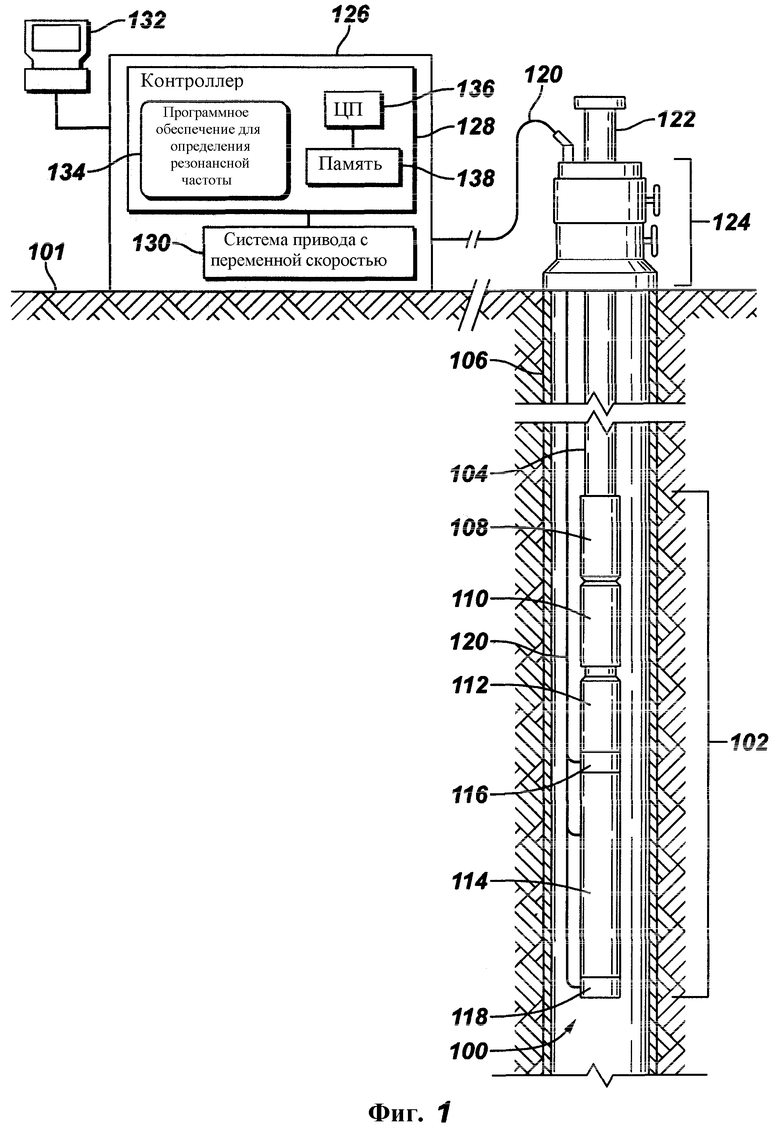
| СПОСОБ УПРАВЛЕНИЯ КОЛЕБАНИЯМИ В БУРОВОМ ОБОРУДОВАНИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2087701C1 |
| СПОСОБ ПИТАНИЯ И ПЕРЕДАЧИ ИНФОРМАЦИИ ПОГРУЖНОГО БЛОКА СИСТЕМЫ ТЕЛЕМЕТРИИ УСТАНОВКИ ПОГРУЖНОГО НАСОСА И УСТАНОВКА ПОГРУЖНОГО НАСОСА (ВАРИАНТЫ) | 2002 |
|
RU2237807C2 |
| КОЛОНКОВЫЙ БУРОВОЙ СНАРЯД С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2002 |
|
RU2228420C2 |
| КЛАПАН ПЕРЕПУСКНОЙ МАГНИТОРЕГУЛИРУЕМЫЙ ДИСКРЕТНОГО ДЕЙСТВИЯ С ЗАЩИТОЙ ОТ ИЗНОСА (ВАРИАНТЫ) | 2009 |
|
RU2400663C1 |
| СПОСОБ ПРОИЗВОДСТВА АРОМАТИЗИРОВАННОГО ТЕМНОГО ПИВА | 2009 |
|
RU2394071C1 |
| US 2005079063 A1, 14.04.2005. | |||

