Перекрестная ссылка на родственные заявки
[1] Данный документ основан на и испрашивает приоритет по заявке на патент США № 15/588,288, поданной 05 мая 2017 г., которая включена в данный документ в полном объеме посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[2] Данное изобретение относится в целом к области бурения скважин. В частности, изобретение относится к управлению крутильными колебаниями подвешенных труб для стабилизации вращательного движения труб, используемых для бурения скважины.
УРОВЕНЬ ТЕХНИКИ
[3] Высокоамплитудные крутильные колебания бурильной колонны являются распространенной проблемой при бурении. Они образуются за счет сочетания крутящего момента, возникающего при взаимодействии долота с забоем скважины и бурильной колонны со стенками скважины, и отсутствия демпфирования крутильных колебаний. Одна из причин недостаточного демпфирования заключается в том, что взаимодействие между долотом и породой не обеспечивает никакого демпфирования и даже может усиливать колебания.
[4] Как объяснено в SPE 18049, прерывистое скользящее движение оборудования низа бурильной колонны можно рассматривать как критические самоподдерживающиеся колебания наименьшей крутильной формы, называемые маятникообразными колебаниями. Такое движение характеризуется конечными временными интервалами, в течение которых долото не вращается, а участок бурильной трубы скручивается поворотным столом или верхним приводом. Когда крутящий момент бурильной колонны достигает определенного уровня (определяемого статическим сопротивлением трения в оборудовании низа бурильной колонны), оборудование низа бурильной колонны высвобождается и набирает скорость, более чем в два раза превышающую номинальную, после чего замедляется и снова достигает полной остановки. Очевидно, что такое движение создает большое циклическое напряжение в бурильной трубе, которое может привести к проблемам, связанным с усталостью материалов. Кроме того, высокая скорость долота создает проблемы. Также высокая скорость долота в фазе скольжения может вызывать сильные осевые и боковые колебания в оборудовании низа бурильной колонны, способные повредить соединения. Наконец, вполне вероятно, что бурение с прерывистым скользящим движением приводит к чрезмерному износу долота, а также к снижению скорости проникновения. Частотный анализ крутящего момента привода, связанного с крутильными колебаниями бурильной колонны, в частности, колебаниями с прерывистым скользящим движением, позволяет обнаружить большое количество крутильных резонансов бурильной колонны. Крутизна кривой на резонансных частотах бурильной колонны говорит о небольшом затухании крутильных колебаний бурильной колонны. Halsey, Kyllingstad, and Kylling, «Torque Feedback Used to Cure Slip–Stick Motion», SPE 18049, 1988. Для гашения крутильных колебаний авторы предложили коррекцию скорости, пропорциональную крутящему моменту.
[5] В WO 2014/147575 (переданной Schlumberger) описан способ управления буровой системой, включающей систему привода, бурильную колонну и буровое долото. Система привода вращает бурильную колонну в ходе бурения скважины в геологическом пласте. Способ включает установку требуемой скорости вращения vо бурильной колонны; получение измеренных значений свойств буровой системы и получение на их основании компонента vup скорости вращения бурильной колонны, связанного с энергией восходящего вращения; определение скорости вращения v бурильной колонны путем оптимизации выражения, согласовывающего две противоречивые цели: (i) поддержание стабильной скорости вращения со средним значением vо и (ii) минимизация энергии нисходящего вращения, причем оптимизированное выражение выражает v посредством vо и vup; и управление системой привода для вращения бурильной колонны со скоростью v. (См. WO 2014/147575, реферат).
[6] В патенте США № 5,507,353 (переданном Institut Francais du Petrole) описаны способ и система управления работой бурового долота, предусматривающие дополнительный крутящий момент сопротивления, добавляемый к крутящему моменту относительно бурового долота, так что результирующий крутящий момент относительно бурового долота является возрастающей функцией скорости вращения долота. Система содержит средства управления, подходящие для создания дополнительного крутящего момента сопротивления относительно долота. (См. патент США № 5,507,353, реферат). В частности, патент учитывает изменение осевой нагрузки, действующей на долото в скважине в ответ на полученные измеренные значения скорости вращения в скважине.
[7] В патенте США № 8,136,610 (переданном Schlumberger) описаны способ и система для бурения скважины в среде с использованием бурового долота, процессора и контроллера. Буровое долото может быть выполнено с возможностью вращения в среде и удаления по меньшей мере части среды. Процессор может быть выполнен с возможностью приема первого набора данных, представляющих переменную скорость вращения бурового долота в течение некоторого промежутка времени в среде, и определения, по меньшей мере частично, на основе первого набора данных первой резонансной частоты переменной скорости вращения бурового долота. Контроллер может быть выполнен с возможностью приема второго набора данных, представляющих первую резонансную частоту переменной скорости вращения бурового долота, и изменения силы, прилагаемой к буровому долоту, на основании, по меньшей мере частично, второго набора данных. (См. патент США № 8,136,610, реферат). В частности, в этом патенте предусмотрено предотвращение возбуждения колебаний путем фильтрации сигнала управления автобурильщиком, чтобы избежать резонансной частоты.
[8] Несмотря на эти технические разработки, известные из уровня техники, существует потребность в способе и системе, которые уменьшают или ослабляют крутильные колебания бурильной колонны, в частности, колебания с прерывистым скользящим движением и крутильные резонансы бурильной колонны.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[9] В соответствии с настоящим изобретением недостатки и проблемы, связанные с крутильными колебаниями, преодолеваются путем обеспечения способа и системы, которые уменьшают или ослабляют крутильные колебания бурильной колонны, в частности, колебания с прерывистым скользящим движением и крутильные резонансы бурильной колонны.
[10] Одним из аспектов изобретения является обеспечение алгоритма, предусматривающего: определение нисходящей скорости вращения на поверхности; и изменение осевой нагрузки на долото (WOB, от англ. weight on bit), действующего с поверхности, с соответствующей задержкой, чтобы оно происходило одновременно с изменениями скорости вращения в нисходящем направлении.
[11] В аспекте изобретения предлагается способ бурения ствола скважины буровой установкой, включающий: вращение бурильной колонны и бурового долота с помощью системы привода буровой установки; приложение начального веса бурильной колонны в качестве WOB буровой установки; измерение свойств буровой установки для получения ожидаемой скорости вращения бурового долота; и изменение веса бурильной колонны в качестве WOB буровой установки таким образом, чтобы соответствующее изменение осевой нагрузки, действующей в скважине на буровое долото, происходило приблизительно одновременно с изменением ожидаемой скорости вращения бурового долота.
[12] В соответствии с дополнительным аспектом изобретения предложен автобурильщик для управления системой буровой установки, имеющей бурильную колонну и буровое долото, содержащий: датчик вращения, который принимает сигнал, соответствующий скорости вращения бурильной колонны на буровой установке; процессор; энергонезависимый носитель данных; и набор машиночитаемых инструкций, хранящихся на энергонезависимом носителе данных, при этом инструкции при выполнении их процессором позволяют автобурильщику: приложить начальный вес бурильной колонны в качестве WOB буровой установки; измерить свойства буровой установки для получения ожидаемой скорости вращения бурового долота; и изменить вес бурильной колонны в WOB буровой установки таким образом, чтобы соответствующее изменение осевой нагрузки, действующей в скважине на буровое долото, происходило приблизительно одновременно с изменением ожидаемой скорости вращения бурового долота.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[13] Более полное понимание данных вариантов реализации изобретения можно получить, обратившись к нижеследующему описанию, приведенному вместе с сопровождающими графическими материалами, в которых аналогичные ссылочные позиции обозначают аналогичные элементы.
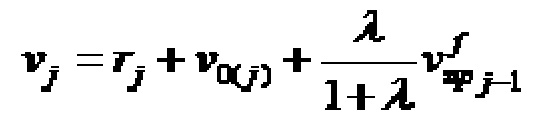
[14] На фиг. 1 проиллюстрирована схема буровой установки, используемой для проведения операции бурения, управляемой автобурильщиком.
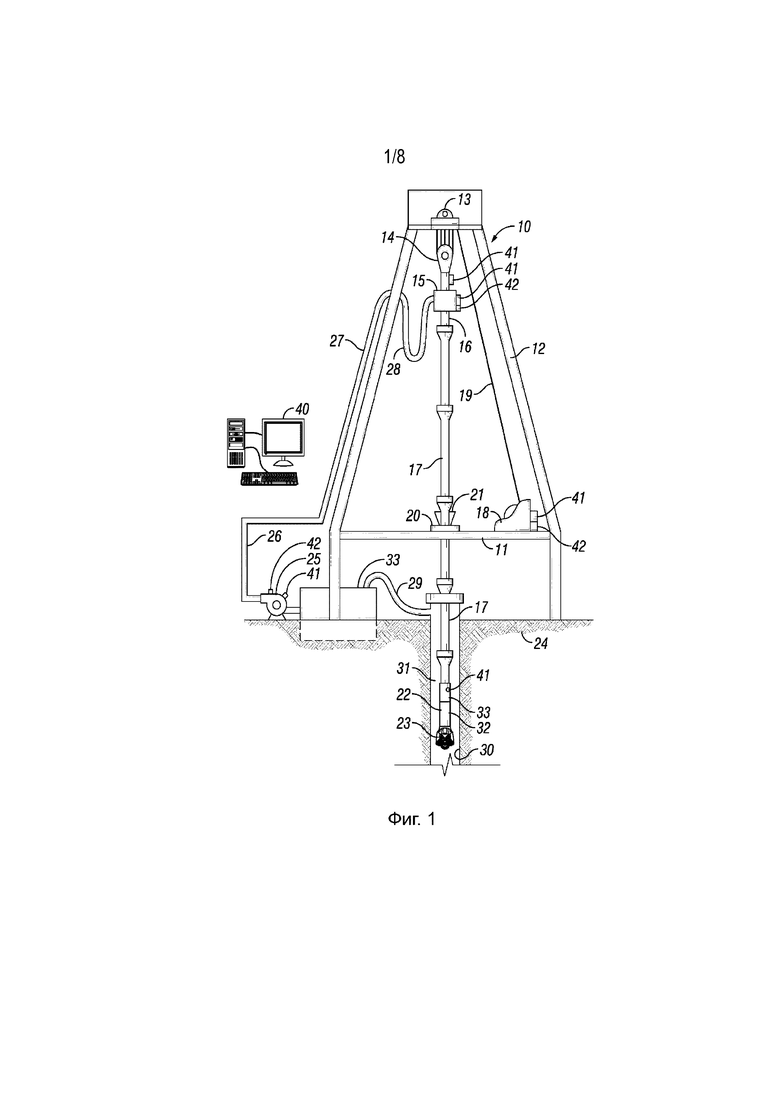
[15] На фиг. 2 приведена схема автобурильщика, иллюстрирующая различные компоненты, сообщающиеся друг с другом, а также с датчиками и исполнительными механизмами буровой системы.
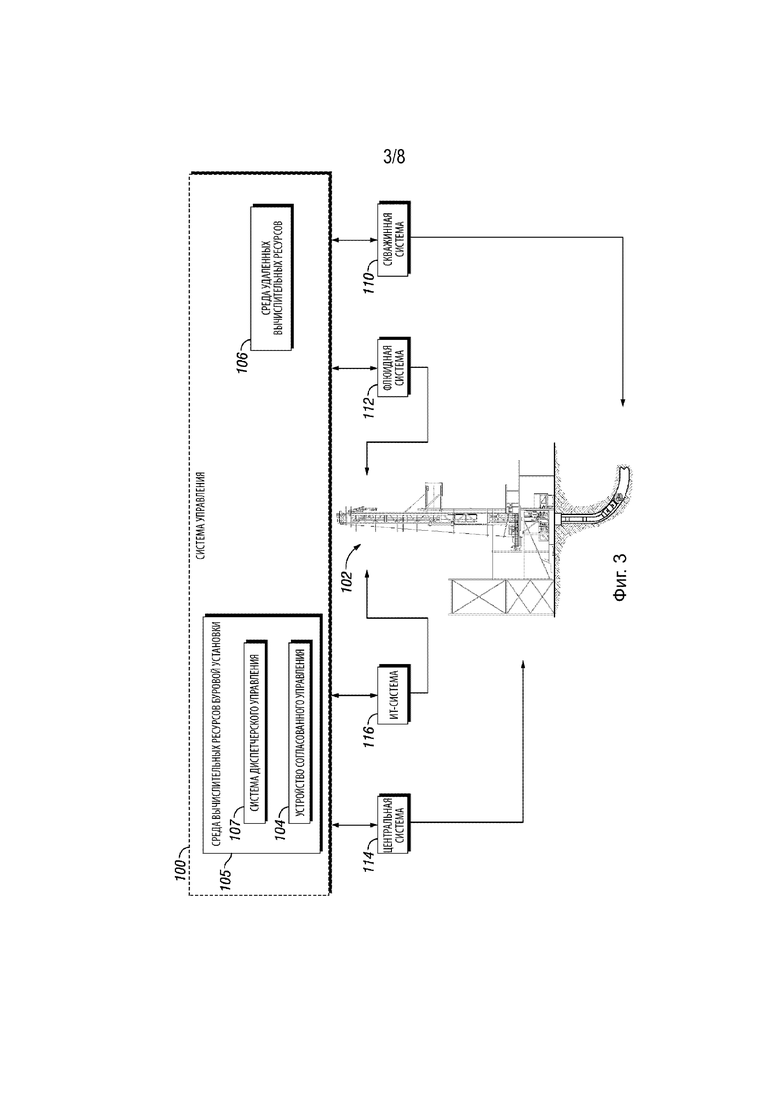
[16] На фиг. 3 схематически проиллюстрирована буровая установка и система управления.
[17] На фиг. 4 схематически проиллюстрирована буровая установка и среда удаленных вычислительных ресурсов.
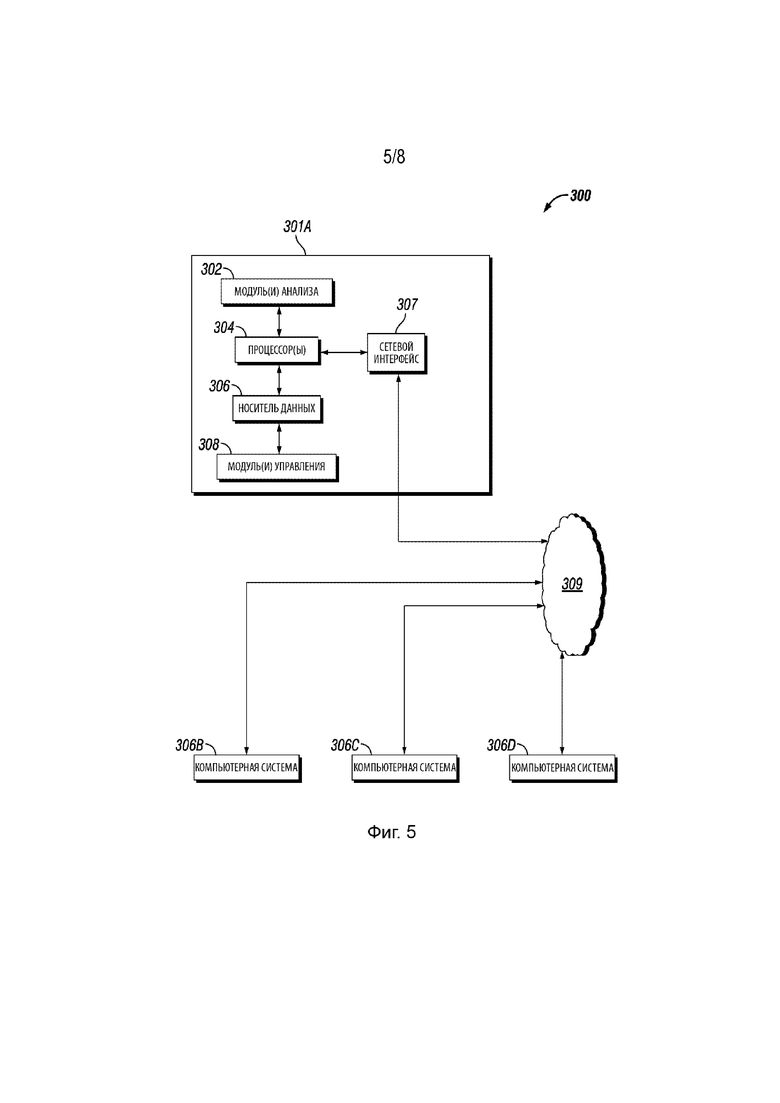
[18] На фиг. 5 схематически проиллюстрирована вычислительная система.
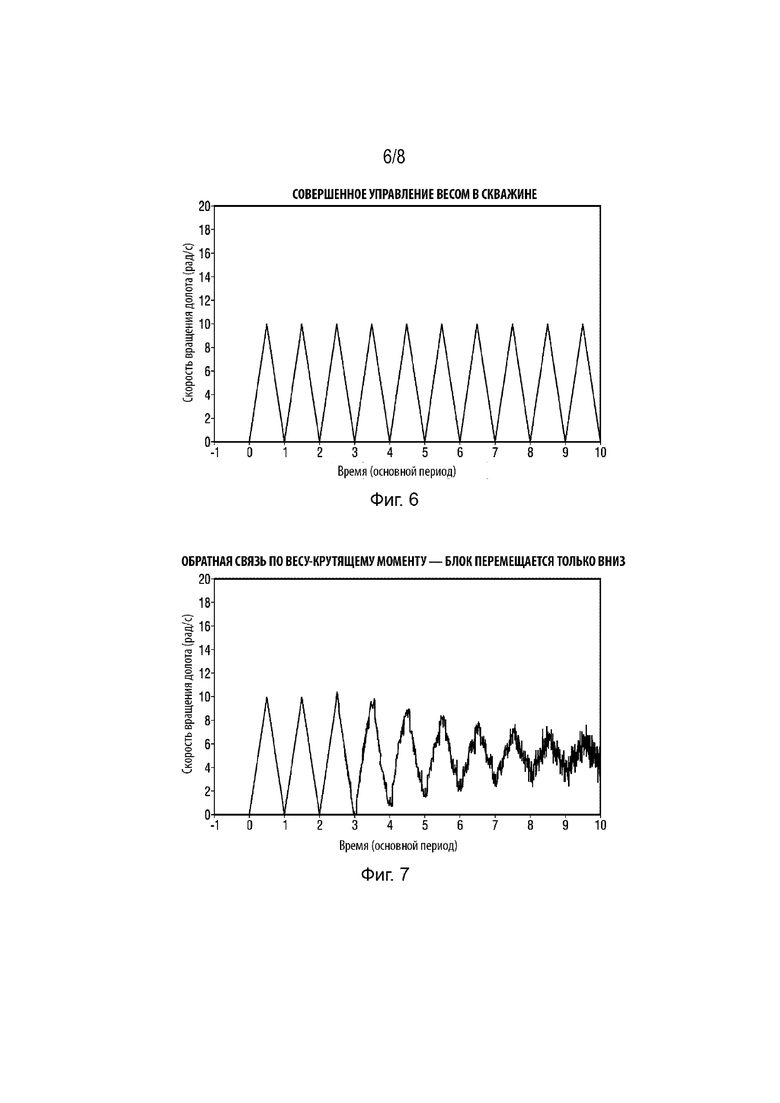
[19] На фиг. 6 приведена кривая данных, определяемая крутящим моментом в бурильной колонне на буровой установке в зависимости от веса бурильной колонны в качестве WOB буровой установки, для моделирования прерывистого проскальзывания долота, при этом осевая нагрузка в скважине, действующая на долото, идеально контролируется для поддержания его постоянства.
[20] На фиг. 7 проиллюстрировано моделирование эффекта подачи гармоники крутильной волны в скважине (с необходимой задержкой) в контроллер веса бурильной колонны в качестве WOB буровой установки.
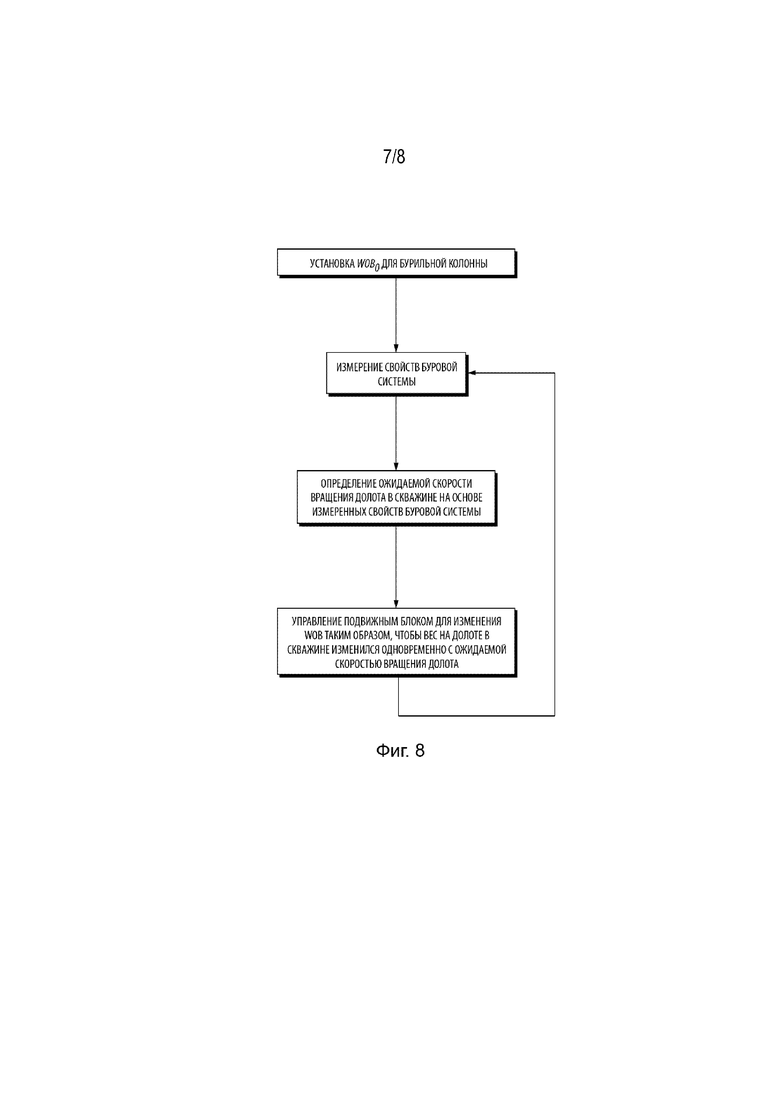
[21] На фиг. 8 приведена блок–схема алгоритма управления весом бурильной колонны в качестве WOB буровой установки, таким образом, чтобы вес бурильной колонны в скважине, действующий на буровое долото, изменяется одновременно с ожидаемым изменением скорости вращения бурового долота.
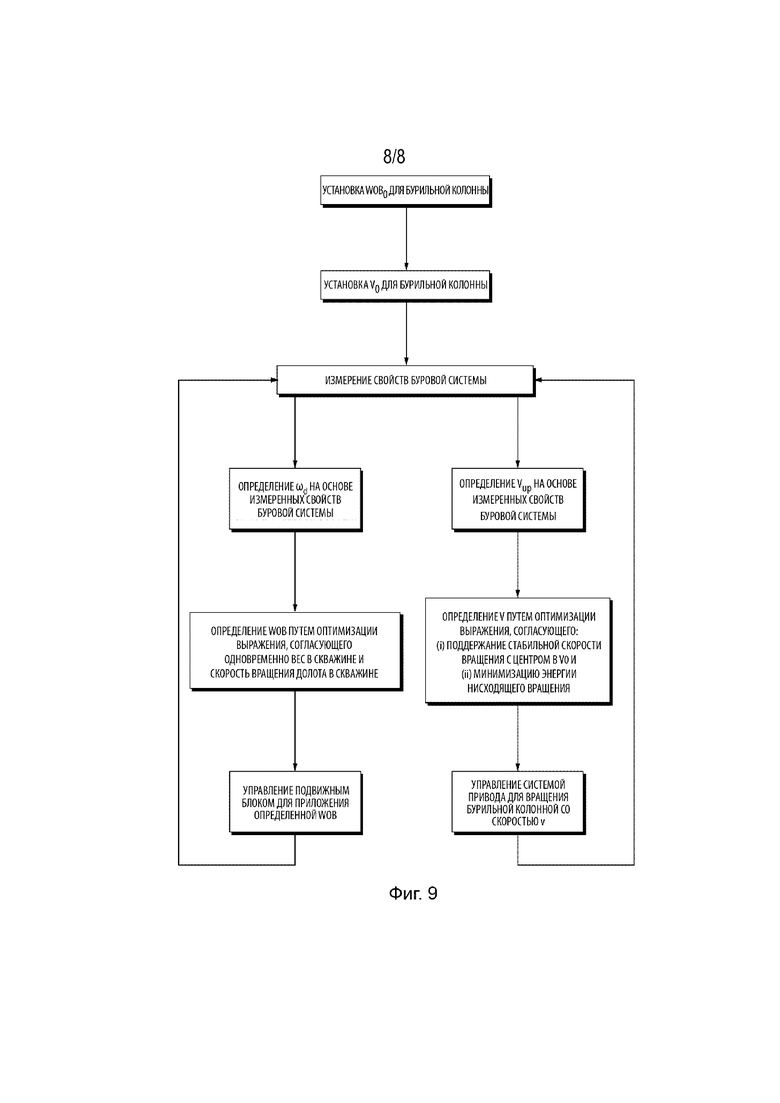
[22] На фиг. 9 приведена блок–схема алгоритма управления весом бурильной колонны в качестве WOB буровой установки и способ уменьшения крутильных колебаний бурового долота путем изменения контролируемой скорости вращения бурильной колонны посредством системы привода.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[23] Предпочтительные варианты реализации изобретения лучше всего понятны со ссылкой на приведенные ниже фиг. 1–9 с учетом следующего общего обсуждения. Данное изобретение может быть более легко понято в контексте высокоуровневого описания определенных вариантов реализации изобретения.
[24] Одним аспектом изобретения является управление верхним приводом для уменьшения прерывистого проскальзывания в системе буровой установки для бурения ствола скважины. Крутильные волны распространяются вверх и вниз по бурильной колонне при ее вращении в стволе скважины. Восходящие крутильные волны могут отражаться на поверхности в нисходящие крутильные волны, что может приводить к большим крутильным резонансам и повторяющемуся прерывистому проскальзыванию. В бурильной колонне с более крупной трубой у поверхности некоторые из восходящих крутильных волн могут отражаться до достижения ими поверхности, что может затруднить управление прерывистым проскальзыванием с поверхности, поскольку волны на поверхности не наблюдаются. Нисходящие крутильные волны в бурильной колонне могут также включать в себя волны, инициируемые верхним приводом, вращающим бурильную колонну. Один аспект данного изобретения направлен на достижение желаемой скорости вращения бурильной колонны на поверхности (v0) при минимизации нисходящей энергии (vdown). Эта формулировка хорошо подходит для внешней системы управления, контролирующую быстродействующую встроенную систему управления верхним приводом, которая стремится обеспечить определенную скорость вращения. Современные контроллеры пропорционально–интегрального типа верхнего привода (в сочетании с верхними приводами большой мощности) могут обеспечивать очень жесткий контроль скорости вращения. Способ и система по данному изобретению, которые уменьшают или демпфируют крутильные колебания бурильной колонны, в частности, колебания с прерывистым проскальзыванием и резонансы крутильных колебаний бурильной колонны, могут использоваться с автобурильщиком, проиллюстрированным на фиг. 1 и 2.
[25] На фиг. 1 представлена схема буровой установки 10 в процессе бурения скважины. Буровая установка 10 содержит приподнятый пол 11 буровой установки и буровую вышку 12, проходящую вверх от пола. Кронблок 13 расположен в верхней части буровой вышки 12, и на нем подвешен подвижный блок 14. Подвижный блок 14 может поддерживать верхний привод 15. Центральный вал 16 проходит от нижней стороны верхнего привода 15 и используется для подвешивания и/или вращения трубчатого бурового оборудования, когда оно поднимается/опускается в стволе 30 скважины. Бурильная колонна 17 составлена до центрального вала 16, причем бурильная колонна 17 содержит общую длину соединенных звеньев бурильных труб или подобных компонентов, проходящих в ствол 30 скважины. Один или большее количество двигателей, размещенных в верхнем приводе 15, вращают бурильную колонну 17. Буровая лебедка 18 разматывает и сматывает буровой трос 19 относительно кронблока 13 и подвижного блока 14, чтобы поднимать/опускать различное буровое оборудование.
[26] Как показано на фиг. 1, новое звено бурильной колонны 17 добавляется, когда нижняя часть бурильной колонны 17 свешивается с пола 11 буровой установки с помощью поворотного стола 20. Плашки 21 фиксируют подвешенную часть бурильной колонны 17 в поворотном столе 20. Оборудование 22 низа бурильной колонны прикреплено к нижнему концу бурильной колонны 17 и содержит: буровое долото 23 для бурения сквозь пласт 24; двигатель 32 объемного типа (PDM, от англ. positive displacement motor); и модуль 33 измерений в процессе бурения (MWD, от англ. measurement while drilling).
[27] В процессе бурения буровой раствор может циркулировать через ствол 30 скважины для удаления выбуренной породы вокруг бурового долота 23. Буровой насос 25 прокачивает буровой раствор через нагнетательную линию 26, вертикальную трубу 27 и буровой шланг 28 для подачи бурового раствора в верхний привод 15. Буровой раствор течет от верхнего привода 15 вниз через бурильную колонну 17 и выходит из бурильной колонны 17 через буровое долото 23. Из бурового долота 23 буровой раствор течет вверх через кольцевое пространство 31 между стволом 30 скважины и бурильной колонной 17, отводя выбуренную породу от бурового долота 23. Возвратный канал 29 позволяет буровому раствору течь из верхней части кольцевого пространства 31 в приемник 33 для бурового раствора. Конечно же, в буровой насос 25 буровой раствор подается из приемника 33 для бурового раствора. Буровой раствор обычно проходит через ряд вибраторов, сепараторов и т.д. (не показаны) для отделения шлама от бурового раствора, прежде чем буровой раствор снова поступает в циркуляционный контур с помощью бурового насоса 25.
[28] Как показано на фиг. 1, для управления процессом бурения может использоваться автобурильщик 40. Автобурильщик 40 может быть выполнен с возможностью приема данных параметров бурения и данных о выполнении бурения, связанных с работой буровой установки 10. Данные параметров бурения и данные о выполнении бурения могут содержать измерения, отслеживаемые рядом датчиков 41, размещенных вокруг буровой установки 10, например, на буровой лебедке 18, подвижном блоке 14, верхнем приводе 15, буровом насосе 25 и модуле 33 измерений в процессе бурения (MWD), как показано в проиллюстрированном варианте реализации изобретения. Датчики 41 могут контролировать ток, напряжение, удельное сопротивление, силу, положение, вес, механическое напряжение, скорость, скорость вращения или другие измеряемые показатели, связанные с параметрами или выполнением бурения, и соответствующие входные данные могут быть агрегированы в виде необработанных результатов выполненных датчиком измерений или в виде масштабированных технических данных. Автобурильщик 40 может принимать данные параметров бурения и данные о выполнении бурения непосредственно от датчиков 41, установленных в определенные частях оборудования на буровой установке 10, так что датчики 41 на практике образуют часть буровой системы. Этот тип сбора данных может позволить использовать более высокие частоты выборки для мониторинга соответствующих параметров бурения и показателей выполнения бурения.
[29] Несколько компонентов буровой установки 10 также могут содержать исполнительные механизмы 42 управления. Например, лебедка 18 может содержать исполнительный механизм 42, позволяющий автобурильщику 40 управлять работой буровой лебедки 18. Верхний привод 15 и буровой насос 25 также могут иметь исполнительные механизмы 42. Исполнительные механизмы 42 позволяют автобурильщику 40 управлять различными аспектами процесса бурения, например: скоростью вращения долота, направлением вращения бурильной колонны, осевой нагрузкой на долото, давлением бурового раствора, скоростью потока бурового раствора, плотностью бурового раствора и т.д. Как правило, автобурильщик приводит в действие только буровую лебедку для изменения скорости, с которой бурильная труба опускается в скважину, и не изменяет расход, скорость вращения и т.д., хотя для изменения этих параметров можно использовать автобурильщик.
[30] На фиг. 2 проиллюстрирована схема автобурильщика 40 и других компонентов буровой установки. Автобурильщик 40 может содержать процессор 43, который может принимать различные входные данные, такие как данные параметров бурения и данные выполнения бурения, от датчиков 41. Кроме того, процессор 43 может быть функционально связан с запоминающим устройством 47 и хранилищем 48 для выполнения исполняемых компьютером инструкций с целью осуществления раскрытых в данное время методик. Эти инструкции могут быть закодированы в программных/аппаратных программах и модулях, которые могут выполняться процессором 43. Компьютерные коды могут храниться в любом подходящем изделии, включающем по меньшей мере один материальный энергонезависимый машиночитаемый носитель (например, жесткий диск), который по меньшей мере совместно хранит эти инструкции или процедуры, таком как запоминающее устройство 47 или хранилище 48. Модуль 49 автобурильщика может содержать аппаратное/программное обеспечение для обеспечения управления автобурильщиком.
[31] В некоторых вариантах реализации изобретения алгоритмы управления автобурильщиком могут находиться в модуле 49 автобурильщика. В других вариантах реализации изобретения алгоритмы управления автобурильщиком могут быть расположены в программируемых логических контроллерах (PLC, от англ. programmable logic controller), которые сами управляют исполнительными механизмами буровой установки. В некоторых вариантах реализации изобретения алгоритмы управления автобурильщиком могут быть реализованы на программном уровне над уровнем PLC. Например, алгоритм управления автобурильщиком может вычислять команду скорости проходки (ROP, от англ. rate of penetration) для отправки быстродействующему ПИ–контроллеру касательно скорости буровой лебедки.
[32] Способ и система по данному изобретению, которые уменьшают или демпфируют крутильные колебания бурильной колонны, в частности, колебания с прерывистым проскальзыванием и резонансы крутильных колебаний бурильной колонны, могут использоваться с системой управления буровой установкой, описанной в патентной публикации США № 2016/0290046, включенной в данный документ в полном объеме посредством ссылки. На фиг. 3 проиллюстрирован концептуальный схематический вид системы 100 управления, предназначенной для буровой установки 102, в соответствии с вариантом осуществления. Система 100 управления может содержать среду 105 вычислительных ресурсов буровой установки, которая может быть расположена на месте на буровой установке 102 и в некоторых вариантах реализации изобретения может иметь устройство 104 согласованного управления. Система 100 управления также может предусматривать систему 107 диспетчерского управления. В некоторых вариантах реализации изобретения система 100 управления может содержать среду 106 удаленных вычислительных ресурсов, которая может быть расположена вне буровой установки 102.
[33] Среда 106 удаленных вычислительных ресурсов может содержать вычислительные ресурсы, расположенные вне буровой установки 102 и доступные по сети. «Облачная» вычислительная среда является одним из примеров удаленного вычислительного ресурса. Среда облачных вычислений может связываться со средой 105 вычислительных ресурсов буровой установки через сетевое соединение (например, соединение WAN или LAN).
[34] Кроме того, буровая установка 102 может содержать различные системы с различными датчиками и оборудованием для выполнения операций буровой установки 102 и может контролироваться и управляться посредством системы 100 управления, например, среды 105 вычислительных ресурсов буровой установки. Кроме того, среда 105 вычислительных ресурсов буровой установки может обеспечивать защищенный доступ к данным буровой установки для использования локальных и внешних пользовательских устройств, контролирующих буровую установку, отправляющих сигналы оперативного управления буровой установке и тому подобное.
[35] Различные типовые системы буровой установки 102 проиллюстрированы на фиг. 3. Например, буровая установка 102 может содержать скважинную систему 110, флюидную систему 112 и центральную систему 114. В некоторых вариантах реализации изобретения буровая установка 102 может содержать систему 116 информационных технологий (ИТ). Скважинная система 110 может содержать, например, оборудование низа бурильной колонны (BHA, от англ. bottomhole assembly), турбобуры, датчики и т.д., расположенные вдоль бурильной колонны, и/или другое буровое оборудование, выполненное с возможностью развертывания в стволе скважины. Соответственно, скважинная система 110 может относиться к инструментам, расположенным в стволе скважины, например, как часть бурильной колонны, используемой для бурения скважины.
[36] Флюидная система 112 может содержать, например, буровой раствор, насосы, клапаны, цемент, оборудование для загрузки бурового раствора, оборудование для управления буровым раствором, оборудование для регулирования давления, сепараторы и другое оборудование для работы с флюидом. Соответственно, флюидная система 112 может выполнять операции с текучей средой буровой установки 102.
[37] Центральная система 114 может содержать подъемно–поворотную платформу, верхние приводы, поворотные столы, ведущие буровые трубы, буровые лебедки, насосы, генераторы, оборудование для работы с трубами, буровые вышки, мачты, основания и другое подходящее оборудование. Соответственно, центральная система 114 может выполнять генерирование электроэнергии, грузоподъемные и поворотные операции буровой установки 102, а также служить в качестве опорной платформы для бурильного оборудования и выполнения этапов работы буровой установки, таких как выполнение соединений и т.д. ИТ–система 116 может содержать программное обеспечение, компьютеры и другое ИТ–оборудование для реализации ИТ–операций буровой установки 102.
[38] Система 100 управления, например, через устройство 104 согласованного управления средой 105 вычислительных ресурсов буровой установки, может контролировать датчики из множества систем буровой установки 102 и предоставлять команды управления множеству систем буровой установки 102, так что данные датчиков нескольких систем могут использоваться для подачи команд управления различным системам буровой установки 102. Например, система 100 может собирать данные поверхности и скважины, согласованные по времени и по глубине, на буровой установке 102 и сохранять собранные данные для доступа на месте на буровой установке 102 или вне ее через среду 105 вычислительных ресурсов буровой установки. Таким образом, система 100 может обеспечивать возможность мониторинга. Кроме того, система 100 управления может предусматривать диспетчерское управление через систему 107 диспетчерского управления.
[39] В некоторых вариантах реализации изобретения одна или большее количество из скважинной системы 110, флюидной системы 112 и/или центральной системы 114 могут быть изготовлены и/или могут эксплуатироваться различными поставщиками. В таком варианте реализации изобретения некоторые системы могут не иметь возможности унифицированного управления (например, из–за разных протоколов, ограничений на разрешения управления и т.д.). Однако вариант реализации изобретения с унифицированной системой 100 управления может обеспечивать управление буровой установкой 102 и связанными с ней системами (например, скважинной системой 110, флюидной системой 112 и/или центральной системой 114).
[40] На фиг. 4 проиллюстрирован концептуальный схематический вид системы 100 управления в соответствии с вариантом реализации изобретения. Среда 105 вычислительных ресурсов буровой установки может связываться с внешними устройствами и системами по сети 108 (например, глобальной сети (WAN), такой как Интернет). Кроме того, среда 105 вычислительных ресурсов буровой установки может связываться со средой 106 удаленных вычислительных ресурсов по сети 108. На фиг. 4 также приведены вышеупомянутые типовые системы буровой установки 102, такие как скважинная система 110, флюидная система 112, центральная система 114 и ИТ–система 116. В некоторых вариантах реализации изобретения одно или большее количество локальных пользовательских устройств 118 также могут быть включены в буровую установку 102. Локальные пользовательские устройства 118 могут взаимодействовать с ИТ–системой 116. Локальные пользовательские устройства 118 могут включать в себя любое количество пользовательских устройств, например, стационарные пользовательские устройства, предназначенные для размещения на буровой установке 102, и/или портативные пользовательские устройства. В некоторых вариантах реализации изобретения локальные пользовательские устройства 118 могут включать в себя настольный компьютер, ноутбук, смартфон, персональный информационный помощник (PDA, от англ. personal data assistant), планшет, носимый компьютер или другие подходящие устройства. В некоторых вариантах реализации изобретения локальные пользовательские устройства 118 могут осуществлять связь со средой 105 вычислительных ресурсов буровой установки 102, средой 106 удаленных вычислительных ресурсов или обеими.
[41] Одно или большее количество внешних пользовательских устройств 120 также могут входить в систему 100. Внешние пользовательские устройства 120 могут включать в себя настольный компьютер, ноутбук, смартфон, персональный информационный помощник (PDA), планшет, носимый компьютер или другие подходящие устройства. Внешние пользовательские устройства 120 могут быть выполнены с возможностью приема и/или передачи информации (например, мониторинга функций) от буровой установки 102 и/или ей посредством связи со средой 105 вычислительных ресурсов буровой установки. В некоторых вариантах реализации изобретения внешние пользовательские устройства 120 могут предоставлять процессы управления для управления работой различных систем буровой установки 102. В некоторых вариантах реализации изобретения внешние пользовательские устройства 120 могут связываться со средой 106 удаленных вычислительных ресурсов через сеть 108.
[42] Системы буровой установки 102 могут содержать различные датчики, исполнительные механизмы и контроллеры (например, программируемые логические контроллеры (PLC)). Например, скважинная система 110 может содержать датчики 122, исполнительные механизмы 124 и контроллеры 126. Флюидная система 112 может содержать датчики 128, исполнительные механизмы 130 и контроллеры 132. Кроме того, центральная система 114 может содержать датчики 134, исполнительные механизмы 136 и контроллеры 138. Датчики 122, 128 и 134 могут включать в себя любые подходящие датчики для работы буровой установки 102. В некоторых вариантах реализации изобретения датчики 122, 128 и 134 могут включать в себя камеру, датчик давления, датчик температуры, датчик скорости потока, датчик вибрации, датчик тока, датчик напряжения, датчик сопротивления, датчик или устройство распознавания жестов, активируемое(ый) голосом или распознающее(ий) голосовые команды устройство или датчик или другие подходящие датчики.
[43] Описанные выше датчики могут предоставлять данные датчиков в среду 105 вычислительных ресурсов буровой установки (например, в устройство 104 согласованного управления). Например, датчики 122 скважинной системы могут предоставлять данные 140 датчиков, датчики 128 флюидной системы могут предоставлять данные 142 датчиков, датчики 134 центральной системы могут предоставлять данные 144 датчиков. Данные 140, 142 и 144 датчиков могут содержать, например, состояние работы оборудования (например, включено или выключено, вверх или вниз, установка или высвобождение и т.д.), параметры бурения (например, глубина, нагрузка на крюк, крутящий момент и т.д.), вспомогательные параметры (например, данные о вибрации насоса) и другие подходящие данные. В некоторых вариантах реализации изобретения полученные данные датчиков могут содержать или быть связаны с временной меткой (например, датой, временем или обоими), указывающей, когда были получены данные датчиков. Кроме того, данные датчиков могут быть сопоставлены с глубиной или другим параметром бурения.
[44] Получение данных датчиков в устройстве 104 согласованного управления может облегчить измерение одних и тех же физических свойств в разных местах буровой установки 102. В некоторых вариантах реализации изобретения измерения одних и тех же физических свойств могут использоваться для избыточности измерений, чтобы обеспечить непрерывную работу скважины. В еще одном варианте реализации изобретения измерения одних и тех же физических свойств в разных местах могут использоваться для обнаружения состояния оборудования в разных физических местоположениях. Различия в измерениях в разных местах с течением времени могут использоваться для определения эксплуатационных показателей оборудования, эксплуатационных показателей системы, сроков планового технического обслуживания и т.п. Например, состояние проскальзывания (например, внутрь или наружу) может быть получено от датчиков и предоставлено в среду 105 вычислительных ресурсов буровой установки. В другом примере полученные образцы флюида могут быть измерены датчиком и связаны с глубиной долота и временем, измеренными другими датчиками. Получение данных от датчика камеры может облегчить определение прибытия и/или установки материалов или оборудования на буровой установке 102. Время прибытия и/или установки материалов или оборудования может использоваться для оценки степени износа материала, планового технического обслуживания оборудования и других оценок.
[45] Устройство 104 согласованного управления может облегчать управление отдельными системами (например, центральной системой 114, скважинной системой или флюидной системой 112 и т.д.) на уровне каждой отдельной системы. Например, во флюидной системе 112 данные 128 датчиков могут подаваться в контроллер 132, который может реагировать, обеспечивая управление исполнительными механизмами 130. Однако для осуществления операций управления, охватывающих несколько систем, управление может координироваться через устройство 104 согласованного управления. Примеры таких операций согласованного управления включают в себя управление давлением в скважине во время спускоподъемных операций. На давление в скважине может влиять как флюидная система 112 (например, скорость работы насоса и положение дросселя), так и центральная система 114 (например, скорость спускоподъемных операций). Если желательно поддерживать определенное давление в скважине во время спускоподъемных операций, устройство 104 согласованного управления может использоваться для направления соответствующих команд управления.
[46] В некоторых вариантах реализации изобретения управление различными системами буровой установки 102 может обеспечиваться посредством трехуровневой системы управления, которая включает в себя первый уровень контроллеров 126, 132 и 138, второй уровень устройства 104 согласованного управления и третий уровень системы диспетчерского управления 107. В других вариантах реализации изобретения согласованное управление может обеспечиваться одним или большим количеством контроллеров одной или большего количества систем 110, 112 и 114 буровой установки без использования устройства 104 согласованного управления. В таких вариантах реализации изобретения среда 105 вычислительных ресурсов буровой установки может предоставлять процессы управления непосредственно этим контроллерам для согласованного управления. Например, в некоторых вариантах реализации изобретения контроллеры 126 и контроллеры 132 могут использоваться для согласованного управления несколькими системами буровой установки 102.
[47] Данные 140, 142 и 144 датчиков могут приниматься устройством 104 согласованного управления и использоваться для управления буровой установкой 102 и системами 110, 112 и 114 буровой установки. В некоторых вариантах реализации изобретения данные 140, 142 и 144 датчиков могут быть зашифрованы для получения зашифрованных данных 146 датчиков. Например, в некоторых вариантах реализации изобретения среда 105 вычислительных ресурсов буровой установки может шифровать данные от датчиков и систем разных типов, чтобы создать набор зашифрованных данных 146 датчиков. Таким образом, зашифрованные данные 146 датчиков не могут быть просмотрены с неавторизованных пользовательских устройств (внешних или локальных пользовательских устройств), если такие устройства получают доступ к одной или большему количеству сетей буровой установки 102. Зашифрованные данные 146 датчиков могут содержать временную метку и сопоставленный параметр бурения (например, глубину), как было описано выше. Зашифрованные данные 146 датчиков могут направляться в среду 106 удаленных вычислительных ресурсов по сети 108 и храниться в качестве зашифрованных данных 148 датчиков.
[48] Среда 105 вычислительных ресурсов буровой установки может предоставлять зашифрованные данные 148 датчиков, доступные для просмотра и обработки вне объекта, например, с использованием внешних пользовательских устройств 120. Доступ к зашифрованным данным 148 датчиков может быть ограничен посредством управления доступом, реализованного в среде 105 вычислительных ресурсов буровой установки. В некоторых вариантах реализации изобретения зашифрованные данные 148 датчиков могут предоставляться в режиме реального времени для внешних пользовательских устройств 120, так что находящийся не на объекте персонал может просматривать состояние буровой установки 102 в реальном времени и предоставлять обратную связь на основе данных датчиков в реальном времени. Например, различные сегменты зашифрованных данных 146 датчиков могут отправляться на внешние пользовательские устройства 120. В некоторых вариантах реализации изобретения зашифрованные данные датчиков могут быть дешифрованы средой 105 вычислительных ресурсов буровой установки перед передачей или дешифрованы на внешнем пользовательском устройстве после получения зашифрованных данных датчиков.
[49] Внешнее пользовательское устройство 120 может содержать тонкий клиент, выполненный с возможностью отображения данных, полученных от среды 105 вычислительных ресурсов буровой установки и/или среды 106 удаленных вычислительных ресурсов. Например, несколько типов тонких клиентов (например, устройства с возможностью отображения и минимальными возможностями обработки) могут использоваться для определенных функций или для просмотра различных данных датчиков.
[50] Среда 105 вычислительных ресурсов буровой установки может содержать различные вычислительные ресурсы, используемые для мониторинга и управления операциями, такие как один или большее количество компьютеров, имеющих процессор и запоминающее устройство. Например, устройство 104 согласованного управления может содержать компьютер, имеющий процессор и запоминающее устройство для обработки данных датчиков, хранения данных датчиков и подачи команд управления в ответ на данные датчиков. Как отмечено выше, устройство 104 согласованного управления может управлять различными операциями различных систем буровой установки 102 посредством анализа данных датчиков от одной или большего количества систем буровой установки (например, 110, 112, 114), чтобы обеспечить согласованное управление системами буровой установки 102. Устройство 104 согласованного управления может выполнять команды 150 управления для управления различными системами буровой установки 102 (например, системами 110, 112, 114 буровой установки). Устройство 104 согласованного управления может направлять управляющие данные, определенные в результате выполнения команд 150 управления, в одну или большее количество систем буровой установки 102. Например, управляющие данные 152 могут направляться в скважинную систему 110, управляющие данные 154 могут направляться во флюидную систему 112, и управляющие данные 154 могут направляться в центральную систему 114. Управляющие данные могут содержать, например, команды оператора (например, включить или выключить насос, открыть или закрыть клапан, обновить установленное значение физического свойства и т.д.). В некоторых вариантах реализации изобретения устройство 104 согласованного управления может содержать контур быстрого управления, который непосредственно получает данные 140, 142 и 144 датчиков и выполняет, например, алгоритм управления. В некоторых вариантах реализации изобретения устройство 104 согласованного управления может содержать контур медленного управления, который получает данные через среду 105 вычислительных ресурсов буровой установки для формирования команд управления.
[51] В некоторых вариантах реализации изобретения устройство 104 согласованного управления может быть промежуточным звеном между системой 107 диспетчерского управления и контроллерами 126, 132 и 138 систем 110, 112 и 114. Например, в таких вариантах реализации изобретения система 107 диспетчерского управления может использоваться для управления системами буровой установки 102. Система диспетчерского управления 107 может содержать, например, устройства для ввода команд управления с целью выполнения операций системами буровой установки 102. В некоторых вариантах реализации изобретения устройство 104 согласованного управления может принимать команды от системы 107 диспетчерского управления, обрабатывать команды в соответствии с правилом (например, алгоритмом, основанным на законах физики для операций бурения) и/или процессами управления, полученными от среды 105 вычислительных ресурсов буровой установки, и предоставлять данные управления одной или большему количеству систем буровой установки 102. В некоторых вариантах реализации изобретения система 107 диспетчерского управления может предоставляться и/или контролироваться третьей стороной. В таких вариантах реализации изобретения устройство 104 согласованного управления может координировать управление между дискретными системами диспетчерского управления и системами 110, 112 и 114, используя команды управления, которые могут быть оптимизированы на основе данных датчиков, полученных из систем 110, 112 и 114, и проанализированы с использованием среды 105 вычислительных ресурсов буровой установки.
[52] Среда 105 вычислительных ресурсов буровой установки может содержать процесс 141 мониторинга, который может использовать данные датчиков для определения информации о буровой установке 102. Например, в некоторых вариантах реализации изобретения процесс 141 мониторинга может определять состояние бурения, работоспособность оборудования, работоспособность системы, график технического обслуживания или любую их комбинацию. В некоторых вариантах реализации изобретения среда 105 вычислительных ресурсов буровой установки может содержать процессы 143 управления, которые могут использовать данные 146 датчиков для оптимизации операций бурения, таких как, например, управление буровым оборудованием для повышения эффективности бурения, надежности оборудования и т.п. Например, в некоторых вариантах реализации изобретения, полученные данные датчиков могут использоваться для определения схемы шумоподавления с целью улучшения обработки электромагнитного сигнала и сигнала телеметрии по гидроимпульсному каналу связи. Процессы 143 управления могут быть реализованы посредством, например, алгоритма управления, компьютерной программы, прошивки или другого подходящего аппаратного и/или программного обеспечения. В некоторых вариантах реализации изобретения среда 106 удаленных вычислительных ресурсов может содержать процесс 145 управления, который может предоставляться среде 105 вычислительных ресурсов буровой установки.
[53] Среда 105 вычислительных ресурсов буровой установки может содержать различные вычислительные ресурсы, такие как, например, один компьютер или множество компьютеров. В некоторых вариантах реализации изобретения среда 105 вычислительных ресурсов буровой установки может содержать виртуальную компьютерную систему и виртуальную базу данных или другую виртуальную структуру для собранных данных. Виртуальная компьютерная система и виртуальная база данных могут содержать один или большее количество интерфейсов ресурсов (например, веб–интерфейсов), позволяющих отправлять вызовы интерфейса прикладного программирования (API, от англ. application programming interface), адресованные различным ресурсам, в виде запроса. Кроме того, каждый из ресурсов может содержать один или большее количество интерфейсов ресурсов, позволяющих ресурсам обращаться друг к другу (например, чтобы позволить виртуальной компьютерной системе среды вычислительных ресурсов сохранять данные в базе данных или другой структуре для собранных данных или извлекать данные из нее).
[54] Виртуальная компьютерная система может содержать набор вычислительных ресурсов, выполненных с возможностью создания экземпляров виртуальной машины. Пользователь может взаимодействовать с виртуальной компьютерной системой через внешнее пользовательское устройство или, в некоторых вариантах реализации изобретения, локальное пользовательское устройство. В некоторых вариантах реализации изобретения в среде 105 вычислительных ресурсов буровой установки могут использоваться другие компьютерные системы или службы компьютерных систем, такие как компьютерная система или служба компьютерной системы, которая предоставляет вычислительные ресурсы на выделенных или совместно используемых компьютерах/серверах и/или других физических устройствах. В некоторых вариантах реализации изобретения среда 105 вычислительных ресурсов буровой установки может содержать один сервер (в дискретном аппаратном компоненте или в качестве виртуального сервера) или множество серверов (например, веб–серверы, серверы приложений или другие серверы). Серверы могут быть, например, компьютерами в любой физической и/или виртуальной конфигурации.
[55] В некоторых вариантах реализации изобретения среда 105 вычислительных ресурсов буровой установки может содержать базу данных, которая может быть набором вычислительных ресурсов, работающих с одним или большим количеством наборов данных. Операции с такими наборами данных или управление ими могут осуществляться с использованием вызовов API. Наборы данных, такие как данные датчиков, могут быть доступны другим ресурсам в среде вычислительных ресурсов буровой установки или пользовательским устройствам (например, локальному пользовательскому устройству 118 и/или внешнему пользовательскому устройству 120), получающим доступ к среде 105 вычислительных ресурсов буровой установки. В некоторых вариантах реализации изобретения среда 106 удаленных вычислительных ресурсов может содержать вычислительные ресурсы, аналогичные описанным выше, например, один компьютер или множество компьютеров (в дискретных аппаратных компонентах или виртуальных компьютерных системах).
[56] В некоторых вариантах реализации изобретения способы данного изобретения могут осуществляться вычислительной системой. На фиг. 5 проиллюстрирован пример такой вычислительной системы 300 в соответствии с некоторыми вариантами реализации изобретения. Вычислительная система 300 может содержать компьютер или компьютерную систему 301A, которая может быть отдельной компьютерной системой 301A или конфигурацией распределенных компьютерных систем. Компьютерная система 301A содержит один или большее количество модулей 302 анализа, выполненных с возможностью выполнения различных задач в соответствии с некоторыми вариантами реализации изобретения, таких как один или большее количество способов, описанных в данном документе. Для выполнения этих различных задач модуль 302 анализа выполняет независимо или согласованно с одним или большим количеством процессоров 304, соединенных с одним или большим количеством носителей 306 данных. Процессор(ы) 304 также подключен(ы) к сетевому интерфейсу 307, чтобы позволить компьютерной системе 301A обмениваться данными через сеть 309 передачи данных с одной или большим количеством дополнительных компьютерных систем и/или вычислительных систем, таких как 301B, 301C и/или 301D (обратите внимание, что компьютерные системы 301B, 301C и/или 301D могут или не могут совместно использовать ту же архитектуру, что и компьютерная система 301A, и могут находиться в разных физических местоположениях, например, компьютерные системы 301A и 301B могут быть расположены на объекте обработки, поддерживая связь с одной или большим количеством компьютерных систем, таких как 301C и/или 301D, расположенных в одном или большем количестве центров обработки данных и/или в разных странах на разных континентах).
[57] Процессор может содержать микропроцессор, микроконтроллер, модуль или подсистему процессора, программируемую интегральную схему, программируемую вентильную матрицу или другое управляющее или вычислительное устройство.
[58] Носитель 306 данных может быть реализован как один или большее количество машиночитаемых или считываемых компьютером носителей данных. Следует отметить, что хотя в типовом варианте реализации изобретения на фиг. 5 носитель 306 данных изображен как находящийся внутри компьютерной системы 301A, в некоторых вариантах реализации изобретения носитель 306 данных может быть распределен внутри и/или по нескольким внутренним и/или внешним корпусам вычислительной системы 301A и/или дополнительных вычислительных систем. Носители 306 данных могут содержать одну или большее количество различных форм запоминающих устройств, включая полупроводниковые запоминающие устройства, такие как динамические или статические запоминающие устройства с произвольной выборкой (DRAM или SRAM), стираемые и программируемые запоминающие устройства только для чтения (EPROM), электрически стираемые и программируемые запоминающие устройства только для чтения (EEPROM) и флэш–память, магнитные диски, такие как несъемные диски, дискеты и съемные диски, другие магнитные носители, включая ленту, оптические носители, такие как компакт–диски (CD) или цифровые видеодиски (DVD), диски BLUERAY.RTM. или другие типы оптических запоминающих устройств или другие типы запоминающих устройств. Следует отметить, что рассмотренные выше инструкции могут предоставляться на одном машиночитаемом или считываемом компьютером носителе данных или, в альтернативном варианте, могут предоставляться на множестве машиночитаемых или считываемых компьютером носителей данных, распределенных в большой системе, имеющей, возможно, множество узлов. Такой машиночитаемый(ые) или считываемый(ые) компьютером носитель или носители данных считается(считаются) частью изделия (или произведенного изделия). Изделие или произведенное изделие может относиться к любому изготовленному отдельному компоненту или их множеству. Носитель или носитель данных может располагаться в машине, выполняющей машиночитаемые инструкции, или на удаленном узле, с которого машиночитаемые инструкции могут быть загружены по сети для выполнения.
[59] В некоторых вариантах реализации изобретения вычислительная система 300 содержит один или большее количество модулей 308 управления буровой установкой. В примере вычислительной системы 300 компьютерная система 301A содержит модуль 308 управления буровой установкой. В некоторых вариантах реализации изобретения один модуль управления буровой установкой может использоваться для выполнения некоторых или всех аспектов одного или большего количества вариантов реализации способов, описанных в данном документе. В альтернативных вариантах реализации изобретения множество модулей управления буровой установкой может использоваться для выполнения некоторых или всех аспектов способов, описанных в данном документе.
[60] Следует учесть, что вычислительная система 300 является лишь одним примером вычислительной системы, и вычислительная система 300 может иметь больше или меньше компонентов, чем показано, может объединять дополнительные компоненты, не изображенные в примерном варианте реализации изобретения на фиг. 5, и/или вычислительная система 300 может иметь другую конфигурацию или расположение компонентов, изображенных на фиг. 5. Различные компоненты, показанные на фиг. 5, могут быть реализованы в виде аппаратного обеспечения, программного обеспечения или комбинации аппаратного и программного обеспечения, включая одну или большее количество интегральных схем обработки сигналов и/или специализированных интегральных схем.
[61] Кроме того, этапы в способах обработки, описанных в данном документе, могут быть реализованы за счет работы одного или большего количества функциональных модулей в устройстве обработки информации, таком как процессоры общего назначения или специализированные микросхемы, такие как ASIC, FPGA, PLD или другие соответствующие устройства. Эти модули, комбинации этих модулей и/или их комбинации с аппаратным обеспечением общего назначения включены в объем данного изобретения.
[62] Высокоамплитудные крутильные колебания бурильной колонны образуются за счет сочетания крутящего момента, возникающего при взаимодействии долота с забоем скважины и бурильной колонны со стенками скважины, и отсутствия демпфирования крутильных колебаний. Чтобы ослабить эти колебания, крутящий момент на долоте может нуждаться в увеличении с увеличением скорости вращения. Если крутящий момент уменьшается с увеличением скорости вращения, это увеличивает амплитуду колебаний. Хотя крутящий момент бурового долота может уменьшаться при увеличении скорости вращения, даже если крутящий момент буровой установки не увеличивается с увеличением скорости вращения, влияние системы управления весовой нагрузкой может привести к тому, что крутящий момент бурового долота в среднем будет выше при более высокой скорости вращения.
[63] Как правило, крутящий момент бурового долота увеличивается с увеличением веса, действующего на долото, а крутящий момент бурового долота уменьшается с уменьшением осевой нагрузки на долото (WOB). Буровая колонна является эластичной. Таким образом, если скорость проходки (ROP, от англ. rate–of–penetration) долота превышает скорость, с которой бурильная колонна опускается в скважину на буровой установке, осевая нагрузка на долото будет уменьшаться, и, следовательно, будет уменьшаться и крутящий момент. Аналогично, если бурильная колонна опускается в скважину на буровой установке быстрее, чем продвигается буровое долото (ROP), увеличиваются осевая нагрузка на буровое долото и крутящий момент бурового долота. Поскольку высокие и низкие скорости вращения долота совпадают с высокими и низкими скоростями проходки, в среднем крутящий момент будет уменьшаться при более быстром вращении долота и увеличиваться при более медленном вращении долота, что приводит к усилению колебаний.
[64] Скважинное измерение скорости вращения не может быть использовано для увеличения веса, действующего с поверхности, тем самым увеличивая крутящий момент, поскольку даже если информация будет мгновенно передаваться на поверхность, необходимо время для того, чтобы изменения, осуществленные на поверхности, проявились в скважине (осевые волны распространяются вниз по бурильной колонне со скоростью чуть менее 5 км/с); однако если скорость вращения в скважине можно спрогнозировать на основе измерений на поверхности, то, поскольку осевые волны распространяются быстрее, чем крутильные волны (около 3 км/с), будет достаточно времени для проведения измерений на поверхности, осуществления некоторой обработки сигналов и изменения осевой нагрузки на долото, так что ожидаемое изменение скорости вращения и веса будут происходить одновременно (или достаточно близко по времени).
[65] На поверхности, благодаря сочетанию действия верхнего привода (или другого средства вращения бурильной колонны) и отражения крутильных волн, движущихся вверх по бурильной колонне, создаются нисходящие крутильные волны, которые, в конечном итоге, приводят к изменению скорости вращения бурового долота. Нисходящие и восходящие волны могут быть разделены на поверхности с помощью соответствующих линейных комбинаций крутящего момента и скорости вращения. Нисходящая волна ωd может определяться по формуле:
 (1)
(1)
где ωs – скорость вращения на поверхности, Ts – крутящий момент на поверхности и Z – крутильный импеданс бурильной трубы на поверхности.
[66] Если нисходящая волна увеличивается, то после задержки, соответствующей времени прохождения крутильных волн вниз по бурильной трубе, скорость вращения оборудования низа бурильной колонны (BHA) и бурового долота, как правило, также увеличивается. Определяя нисходящую волну на основании измерений (используя формулу 1), а затем, корректируя целевую осевую нагрузку на долото для автобурильщика, можно увеличить осевую нагрузку на долото в скважине (и, следовательно, крутящий момент бурового долота) при увеличении скорости вращения долота. Поскольку нисходящую волну можно сравнивать с ее средним значением, ее необходимо сначала подвергнуть обработке фильтром высоких частот (для удаления среднего значения) выше частоты, которая является низкой по сравнению с резонансным временем системы, и предпочтительно также подвергнуть обработке фильтром низких частот с некоторой подходящей граничной частотой, которая значительно выше резонансной частоты системы. Поскольку фильтрация (особенно фильтром низких частот) привносит задержки, существуют ограничения в отношении того, какие фильтры могут применяться, при этом действия на основании фильтрованных данных должны выполняться лишь с малой задержкой, которая может учитывать задержку, вносимую фильтрацией. Кроме того, если имеются задержки, как электронные, так и механические, между изменением заданного значения автобурильщика и началом изменения положения подвижного блока, их также можно учитывать.
[67] Время, необходимое для прохождения крутильных и осевых волн от поверхности до BHA в скважине, может быть включено в алгоритм. Его можно измерить на буровой установке или оценить, используя моделирование поведения бурильной колонны, либо определить, используя комбинацию этих способов. Чтобы измерить время прохождения волн, связанных с весом (осевые волны) и крутящим моментом (крутильные волны), на поверхности могут предприниматься действия для генерирования осевых волн, отклик на которые может измеряться долотом или BHA. Одним из таких действий является перемещение подвижного блока вниз, что приведет к дополнительному увеличению осевой нагрузки на долото (осевые) и соответствующему увеличению крутящего момента (крутильные). Временная разница между проявлением результатов действия в весе и крутящем моменте на поверхности такая же, как необходимое для алгоритма время прохождения волны. Вместо того, чтобы просто предпринимать одно действие, если блок опускается в ходе серии непериодических этапов или других изменений скорости, а сигналы веса и крутящего момента на поверхности коррелированы, время, соответствующее максимальной корреляции, будет необходимым временем прохождения волны.
[68] В альтернативном варианте тот же самый способ может использоваться с применением моделирования бурильной колонны. Указанная временная разница будет увеличиваться по мере удлинения бурильной колонны в процессе бурения. Хотя временную разницу можно определить один раз, ее повторная оценка может выполняться при каждом изменении длины бурильной колонны. Моделирование может использоваться для оценки изменения временной разницы при добавлении звена труб (удлинении бурильной колонны), и это расчетное изменение может применяться к смоделированной или измеренной временной разнице. В альтернативном варианте временная разница может быть измерена в двух или более случаях, а затем может применяться линейная экстраполяция для корректировки временной разницы при добавлении звена в бурильную колонну (увеличении длины бурильной колонны). Линейная экстраполяция может обоснованно применяться, если к верхней части бурильной колонны добавляется звено того же типа.
[69] Автоматическое управление может контролировать движение подвижного блока. В предпочтительном варианте управление должно быть быстрым, например, как в электромеханическом тормозе. Можно использовать обычные измерения нагрузки на крюк и крутящего момента. Но если временная задержка оценивается с использованием данных измерений, нагрузка на крюк может предпочтительно измеряться датчиками, расположенными близко к вершине бурильной колонны, а не определяться обычными способами на основе натяжения в месте крепления неподвижного конца троса, поскольку между этими двумя измерениями может быть задержка.
[70] На фиг. 6 проиллюстрировано моделирование прерывистого проскальзывания долота, при этом осевая нагрузка на долото в скважине идеально контролируется для поддержания его постоянства. График показывает скорость вращения долота в зависимости от времени, а время нормализовано по периоду основных колебаний бурильной колонны (четырехкратное время прохождения крутильных волн от долота к поверхности). Моделируется процесс полностью без потерь.
[71] На фиг. 7 проиллюстрировано моделирование эффекта подачи гармоники крутильной волны в скважине с правильной задержкой в поверхностные средства управления осевой нагрузкой на долото. Поскольку скорость вращения на поверхности постоянна, это эквивалентно использованию лишь крутящего момента в качестве сигнала обратной связи. В этой простой модели вводится высокочастотный шум, который в действительности будет затухать. Следует отметить, что для большинства буровых установок, в которых спуск бурильной колонны управляется тормозом, подвижный блок может перемещаться только вниз, а не вверх, поэтому автобурильщик не может точно поддерживать требуемую поверхностную осевую нагрузку на долото в некоторых случаях, когда требуемый вес уменьшается слишком быстро. На фиг. 7 это ограничение учтено, но, тем не менее, колебания эффективно уменьшаются. Данное изобретение может применяться как в этих условиях, так и на буровых установках, где подвижный блок может как подниматься, так и опускаться в процессе бурения.
[72] Точное кратное значение вращающего момента, которое должно подаваться в обратном направлении в сигнал веса, зависит от характеристик долота, таких как его тип и радиус. Способ может быть более эффективен для бурового долота с запрессованными поликристаллическими алмазными резцами, у которого наклон кривой графика зависимости крутящего момента от веса больше. Типичная зависимость крутящего момента от веса может быть установлена с помощью испытаний долота, данных, полученных в процессе бурения, или путем моделирования или применения комбинации этих методов. Как только зависимость крутящего момента от веса установлена, и известна типичная величина колебаний крутящего момента на поверхности, величину обратной связи можно установить таким образом, чтобы средняя величина отклонения была выбранной долей средней осевой нагрузки на долото, например, 5% или 10%. Изобретение может быть инициировано добровольно бурильщиком или другими лицами на буровой установке или размещено дистанционно. В альтернативном варианте при автоматическом обнаружении устойчивых крутильных колебаний с высокой амплитудой, например, на основе измерений скорости вращения в скважине, которые передаются на поверхность (например, максимальная, минимальная и средняя скорость за период), или оценки, основанной на изменении крутящего момента на поверхности, способ может быть инициирован автоматически, или его инициирование может быть предложено персоналу диспетчерской для подтверждения. Измерения в скважине также можно использовать для корректировки параметров алгоритма, таким образом, если дополнительное изменение осевой нагрузки на долото приводит к неадекватному снижению изменения скорости вращения в скважине, амплитуда может быть увеличена, а если изменение не дает желаемого эффекта, оно может быть прекращено.
[73] На фиг. 8 показана принципиальная блок–схема способа управления бурением в соответствии с вариантом реализации данного изобретения, в котором реализован алгоритм управления на основе формулы (1). В некоторых вариантах реализации изобретения после установки начального веса бурильной колонны на буровой установке в качестве WOB0 на первом этапе алгоритм зацикливается на последующих этапах с интервалом повторения, достаточно коротким, чтобы этапы повторялись многократно во время доминирующего крутильного резонанса системы. Если система активирована, значение множителя WOB первоначально устанавливается на ноль или значение, близкое к нулю, а затем увеличивается до достижения выбранного значения. В некоторых вариантах реализации изобретения такой способ постепенной активации может уменьшить изменения в работе системы бурения.
[74] Изменение осевой нагрузки на долото может выполняться одновременно со способами уменьшения крутильных колебаний, использующими изменение управляемой скорости вращения на поверхности (например, согласно WО/2014/147575, включенной в данный документ в полном объеме посредством ссылки), или другими способами, которые модифицируют действие контроллера привода вращения для подавления крутильных колебаний. Эти два способа могут действовать конструктивно с повышенной эффективностью.
[75] Например, данное изобретение может использоваться в сочетании с другими способами уменьшения прерывистого проскальзывания. Ниже приведен пример алгоритма для контролируемой скорости вращения на поверхности, призванного уменьшить крутильные колебания на буровом долоте, который может использоваться в сочетании с алгоритмом для определения нисходящей скорости вращения на поверхности и изменения WOB, действующего с поверхности, с соответствующей задержкой так, чтобы это осуществлялось одновременно с изменениями в нисходящей скорости вращения. Для уменьшения крутильных колебаний контролируемая скорость вращения на поверхности может использоваться для достижения требуемой скорости вращения на поверхности (v0) при минимизации величины энергии нисходящего вращения (vdown). Эта формулировка хорошо подходит для внешней системы управления, контролирующую быстродействующую встроенную систему управления верхним приводом, которая стремится обеспечить определенную скорость вращения. Современные ПИ–контроллеры верхнего привода (в сочетании с верхними приводами большой мощности) могут обеспечивать очень жесткий контроль скорости вращения.
[76] Рассматривая задачу как ограничение минимизации, можно ее записать как минимизацию Е, где
 (2)
(2)
где v – скорость вращения, передаваемая на верхний привод, представляет собой сумму vup и vdown, а λ является константой и отражает относительный вес, присваиваемый двум противоречивым целям.
[77] Восходящая составляющая скорости вращения может быть определена на основе одновременных поверхностных измерений скорости вращения и крутящего момента (T). Если Z представляет собой крутильный импеданс трубы (может быть достаточно точно рассчитан, исходя из размеров трубы) на поверхности, тогда нисходящие и восходящие компоненты таковы:
[78] 
[79] Однако, поскольку это приводит к более низкой средней скорости вращения, чем хотелось бы, перепишем ограничение минимизации следующим образом:

[80] Решением уравнения является:
[81] Долгосрочная средняя скорость вращения все равно будет не совсем правильной, поэтому в дополнение можем добавить компонент r:
 (3)
(3)
[82] Где
[83] А k выбирают так, чтобы оно было длинным по сравнению с резонансным временем системы (например, 1/60 с). В дискретное время с интервалом выборки δ этот фильтр является тривиальным для реализации
[84] Альтернативой является применение фильтра высоких частот к сигналу vup, используемому в уравнении (3). Это также можно сделать с помощью простого однополюсного фильтра с тем же значением k.
[85] Подходящим значением λ для использования в уравнении (3) является 1. Очевидно, что этот параметр регулирует степень уменьшения крутильного резонанса. При отсутствии управления следует выбрать значение нуль.
[86] И два последних соображения по поводу алгоритма. Чтобы избежать направления высокочастотного шума в контроллер верхнего привода, который может взаимодействовать с алгоритмом внутреннего управления, оценка восходящей скорости вращения может подвергаться обработке фильтром низких частот. Это можно сделать точно так же, как для r, но с большим значением k, выбираемым таким образом, чтобы не отфильтровывать основной крутильный резонанс бурильной колонны. Подходящее значение составляет 10/с.

[87] Во–вторых, если долото сильно залипает, возможен полный останов вращения бурильной колонны. Чтобы избежать этого, может предусматриваться минимальное значение v, например, на 25% меньше требуемого значения v0.
[88] Перепишем уравнение (3)
[89] На фиг. 9 приведена блок–схема способа управления бурением, в котором реализована комбинация алгоритмов управления на основе уравнений (1) и (3). После установки WOB0 и v0 на первых этапах алгоритм зацикливается на последующих этапах с интервалом повторения, достаточно коротким, чтобы этапы повторялись многократно во время доминирующего крутильного резонанса системы. Если система активирована, значение множителя WOB и λ первоначально устанавливаются на нуль или значение, близкое к нулю, а затем увеличиваются до достижения выбранных значений. В некоторых вариантах реализации изобретения такой способ постепенной активации может уменьшить изменения в работе системы бурения.
[90] В альтернативных вариантах реализации изобретения способы управления бурением реализуют комбинацию алгоритмов управления на основе по меньшей мере одного из алгоритмов, описанных в данном документе, с любым другим известным алгоритмом управления. В частности, предполагается, что алгоритмы управления реализуются в комбинации.
Хотя в данном описании подробно описаны раскрытые варианты реализации изобретения, следует понимать, что в вариантах реализации изобретения могут быть сделаны различные изменения, замены и модификации без отступления от их сущности и объема.

Группа изобретений относится к области бурения скважин. Способ бурения ствола скважины буровой установкой включает вращение бурильной колонны и бурового долота с помощью системы привода буровой установки, приложение начального веса бурильной колонны в качестве осевой нагрузки на долото (WOB– weight on bit) буровой установки, измерение свойств буровой установки для получения ожидаемой скорости вращения бурового долота и изменение веса бурильной колонны в качестве WOB буровой установки таким образом, чтобы соответствующее изменение осевой нагрузки, действующей в скважине на буровое долото, происходило одновременно с изменением ожидаемой скорости вращения бурового долота. Изменение веса бурильной колонны в качестве WOB буровой установки дополнительно включает управление целевым объектом управления WOB, который представляет собой предварительно определенный сигнал, суммируемый с сигналом, полученным из линейной комбинации с задержкой измерений скорости вращения и крутящего момента бурильной колонны на поверхности, причем задержка представляет собой разницу между временем распространения крутильного и осевого компонента от поверхности до окрестности долота. Обеспечивается уменьшение или ослабление крутильных колебаний бурильной колонны. 2 н. и 10 з.п. ф-лы, 9 ил.
1. Способ бурения ствола скважины буровой установкой, включающий:
вращение бурильной колонны и бурового долота с помощью системы привода буровой установки;
приложение начального веса бурильной колонны в качестве осевой нагрузки на долото (WOB – weight on bit) буровой установки;
измерение свойств буровой установки для получения ожидаемой скорости вращения бурового долота; и
изменение веса бурильной колонны в качестве WOB буровой установки таким образом, чтобы соответствующее изменение осевой нагрузки, действующей в скважине на буровое долото, происходило одновременно с изменением ожидаемой скорости вращения бурового долота,
причем изменение веса бурильной колонны в качестве WOB буровой установки дополнительно включает:
управление целевым объектом управления WOB, который представляет собой предварительно определенный сигнал, суммируемый с сигналом, полученным из линейной комбинации с задержкой измерений скорости вращения и крутящего момента бурильной колонны на поверхности, причем задержка представляет собой разницу между временем распространения крутильного и осевого компонента от поверхности до окрестности долота.
2. Способ бурения ствола скважины по п. 1, отличающийся тем, что разность между временем распространения крутильного и осевого компонента определяется с использованием корреляции измерений, выполненных на поверхности.
3. Способ бурения ствола скважины по п. 1, отличающийся тем, что разность между временем распространения крутильного и осевого компонента определяется с использованием моделирования.
4. Способ бурения ствола скважины по п. 1, отличающийся тем, что разность между временем распространения крутильного и осевого компонента определяется с использованием корреляции измерений, выполненных на поверхности, а также моделирования.
5. Способ бурения ствола скважины по п. 1, отличающийся тем, что сигнал, полученный из линейной комбинации измерений с задержкой, подвергается обработке фильтром высоких частот с граничной частотой выше первой заданной частоты, причем первая заданная частота ниже, чем резонансная частота системы.
6. Способ бурения ствола скважины по п. 1, отличающийся тем, что сигнал, полученный из линейной комбинации измерений с задержкой, подвергается обработке фильтром низких частот с граничной частотой ниже второй заданной частоты, причем вторая заданная частота выше, чем резонансная частота системы.
7. Автобурильщик для управления системой буровой установки, имеющей бурильную колонну и буровое долото, содержащий:
датчик вращения, который принимает сигнал, соответствующий скорости вращения бурильной колонны на буровой установке;
процессор;
энергонезависимый носитель данных; и
набор машиночитаемых инструкций, хранящихся на энергонезависимом носителе данных, при этом инструкции при выполнении их процессором позволяют автобурильщику:
приложить начальный вес бурильной колонны в качестве WOB буровой установки;
измерить свойства буровой установки для получения ожидаемой скорости вращения бурового долота; и
изменить вес бурильной колонны в качестве WOB буровой установки таким образом, чтобы соответствующее изменение осевой нагрузки, действующей в скважине на буровое долото, происходило одновременно с изменением ожидаемой скорости вращения бурового долота,
причем набор машиночитаемых инструкций, хранящихся на энергонезависимом носителе данных, при исполнении процессором дополнительно позволяет автобурильщику изменять вес бурильной колонны в качестве WOB бурильной установки посредством:
управления целевым объектом управления WOB, который представляет собой предварительно определенный сигнал, суммируемый с сигналом, полученным из линейной комбинации с задержкой измерений скорости вращения и крутящего момента бурильной колонны на поверхности, причем задержка представляет собой разницу между временем распространения крутильного и осевого компонента от поверхности до окрестности долота.
8. Автобурильщик для управления системой буровой установки по п. 7, отличающийся тем, что разность между временем распространения крутильного и осевого компонента определяется с использованием корреляции измерений, выполненных на поверхности.
9. Автобурильщик для управления системой буровой установки по п. 7, отличающийся тем, что разность между временем распространения крутильного и осевого компонента определяется с использованием моделирования.
10. Автобурильщик для управления системой буровой установки по п. 7, отличающийся тем, что разность между временем распространения крутильного и осевого компонента определяется с использованием корреляции измерений, выполненных на поверхности, дополненной моделированием.
11. Автобурильщик для управления системой буровой установки по п. 7, отличающийся тем, что сигнал, полученный из линейной комбинации измерений с задержкой, подвергается обработке фильтром высоких частот с граничной частотой выше первой заданной частоты, причем первая заданная частота ниже, чем резонансная частота системы.
12. Автобурильщик для управления системой буровой установки по п. 7, отличающийся тем, что сигнал, полученный из линейной комбинации измерений с задержкой, подвергается обработке фильтром низких частот с граничной частотой ниже второй заданной частоты, причем вторая заданная частота выше, чем резонансная частота системы.
| US 5713422 A, 03.02.1998 | |||
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ СКВАЖИН | 2012 |
|
RU2495240C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569659C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

