Изобретение относится к измерительной технике.
Известен способ определения угла сдвига фаз между двумя сигналами [Авторское свидетельство СССР №1406511, G01R 25/00, опубл. 30.09.1983], заключающийся в выборе тактовой частоты в течение одного периода входного сигнала при одновременном измерении периода исследуемого сигнала и временного интервала, пропорционального измеряемому сдвигу фаз, и последующем автоматическом преобразовании результатов этих двух измерений в непосредственный отсчет сдвига фаз в градусах. Причем выбор тактовой частоты осуществляется методом подбора частот из исследуемого поддиапазона.
Недостатками способа являются: сложность процедуры измерения и схемной реализации.
Также известен способ определения угла сдвига фаз между двумя сигналами [Метрология и радиоизмерения: Учебник для вузов. /В.И.Нефедов, В.И.Хахин, В.К.Битюков и др./ Под ред. профессора В.И.Нефедова. - М.: Высш. шк., 2003. С.302-304], выбранный в качестве прототипа, в котором в течение периода Т отслеживают точки пересечения нулевого уровня исследуемыми сигналами. Затем формируют импульс, имеющий длительность Δt и соответствующий сдвигу фаз между сигналами во времени.
Его заполняют счетными импульсами, количество n которых равно
где  - период следования счетных импульсов, m=1, 2, 3....
- период следования счетных импульсов, m=1, 2, 3....
Угол сдвига фаз между сигналами определяется по соотношению
Недостатком данного способа является недостаточная точность установки периода следования счетных импульсов, так как обеспечение кварцевой стабилизаций частоты задающего генератора при перестройке вызывает большие трудности. Низкая стабильность периода Т0 приводит к появлению дополнительных погрешностей измерений. При определении углов сдвига фаз с помощью данного способа имеется погрешность дискретности, связанная с тем, что интервал времени Δt можно измерить с точность до одного периода счетных импульсов T0.
Задачей изобретения является создание простого и точного способа определения углов сдвига фаз двумя сигналами как синусоидальной, так и несинусоидальной формы, представленными цифровыми отсчетами с постоянным шагом дискретизации.
Это достигается тем, что в способе определения угла сдвига фаз между двумя сигналами a(tj) и b(tj), представленными цифровыми отсчетами, так же как и в прототипе, используются определение точек перехода сигналов через нулевой уровень от отрицательных значений к положительным в течение одного периода этих сигналов и определение угла сдвига фаз между ними, который пропорционален времени между переходами исследуемых сигналов через нулевой уровень от отрицательных значений к положительным.
Согласно изобретению вычисление углов сдвига фаз производят для сигналов, представленных цифровыми отсчетами с постоянным шагом дискретизации, а определение точек перехода сигналов через нулевой уровень от отрицательных значений к положительным осуществляют путем запоминания каждого цифрового отсчета - как текущего a(tj), соответствующего текущему моменту времени tj, так и предыдущего a(tj-1). Затем производят сравнение значений отсчетов a(tj-1) и a(tj), на основе которого определяют номера счетных импульсов w и i, соответствующих моментам времени tw и ti, при которых происходит первый переход сигнала a(tj) через нулевой уровень от отрицательного значении к положительному. Далее на основе данных отчетов производят линейную интерполяцию и определяют момент времени tn1, соответствующий первому переходу сигнала а(tj) через нулевой уровень от отрицательного значения к положительному
Далее по аналогичной процедуре определяют момент времени tn2, соответствующий второму переходу сигнала a(tj) через нулевой уровень от отрицательно значения к положительному. Затем определяют значение фазы φa первого сигнала
Одновременно с этим по аналогичной процедуре определяют значение фазы φb второго сигнала. Значения угла сдвига фаз между сигналами а(t) и b(t) определяют как разность значений φa и φb.
Известно, что угол сдвига фаз между двумя сигналами определяют как разность этих колебаний при прохождении ими определенного (например, нулевого) уровня [Меерсон A.M. Радиоизмерительная техника. - Л.: Энергия, 1978. С.247].
Рассмотрим произвольный сигнал х(tj), представленный на фиг.1. Для определения фазы данного сигнала производят поиск пар отсчетов, при которых происходит смена полярности сигнала. Затем для повышения точности определения момента перехода сигнала x(tj) через нулевой уровень от отрицательного значения к положительному производят его линейную интерполяцию на отрезке [tw; ti] с помощью прямой (5).

где
b=x(ti)-a·ti.
Момент времени tn1, соответствующий первому переходу сигнала х(tj) через нулевой уровень от отрицательного значения к положительному, определяют по переходу через нулевой уровень интерполированной функции (5), описывающей сигнал:

Решение уравнения (6) находится по соотношению (3).
Затем по аналогичной процедуре определяют момент времени, соответствующий длительности периода сигнала. Далее по соотношению (4) производят определение фазы сигнала x(tj).
Таким образом, в предлагаемом способе не требуется постоянного изменения периода счетных импульсов и практически отсутствует погрешность дискретности.
Предлагаемый способ позволяет производить определения угла фазового сдвига между двумя сигналами как синусоидальной, так и несинусоидальной формы в течение одного периода, представленных цифровыми отсчетами с постоянным шагом дискретизации.
На фиг.1 приведена осциллограмма произвольного сигнала х(tj).
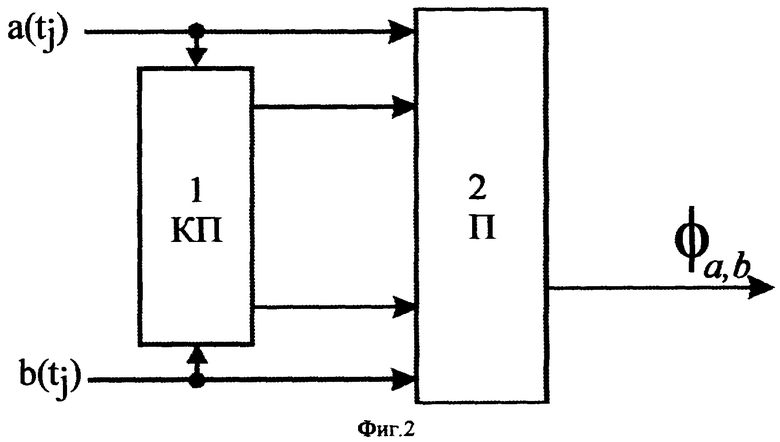
На фиг.2 приведена функциональная блок-схема способа.
Предложенный способ определения угла сдвига фаз между сигналами может быть реализован, например, с помощью функциональной блок-схемы, которая представлена на фиг.2. Она содержит: блок кольцевой памяти 1 (КП); программатор вычисления углов сдвига фаз между сигналами 2 (П).
К входам блока кольцевой памяти 1 (КП) и программатора 2 (П) присоединен источник исследуемых сигналов, представленных в виде цифровых отсчетов. А выходы блока кольцевой памяти 1 (КП) соединены с входами программатора 2 (П).
Выходы программатора 2 (П) связаны с входами сегментных индикаторов (не показаны на фиг.2).
Блок кольцевой памяти 1 (КП) может быть реализован на внешней перезаписываемой памяти данных Amtel AT25L256 (32 кБ). Программатор 2 (П) может быть выполнен на микроконтроллере серии 51 производителя Atmel AT89S53.
Сигналы a(tj) и b(tj), представленные в виде цифровых отсчетов, поступают одновременно на вход блока кольцевой памяти 1 (КП) и на вход программатора 2 (П). В блоке кольцевой памяти 1 (КП) запоминают текущие значения сигналов a(tj) и b(tj) для использования их в последующий момент времени. С выходов блока кольцевой памяти 1 (КП) сигнал  , соответствующий моменту времени tj-1, поступает на вход программатора 2 (П). Также на вход программатора 2 (П) с выходов блока кольцевой памяти 1 (КП) поступает сигнал
, соответствующий моменту времени tj-1, поступает на вход программатора 2 (П). Также на вход программатора 2 (П) с выходов блока кольцевой памяти 1 (КП) поступает сигнал  соответствующий моменту времени tj.
соответствующий моменту времени tj.
Затем в программаторе 2 (П) определяют момент времени  соответствующий первому переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному:
соответствующий первому переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному:
Далее определяют номера счетных импульсов wa2 и ia2, при которых происходит второй переход сигнала а(tj) через нулевой уровень от отрицательных значений к положительным, которые также поступают на вход программатора 2 (П), где определяют момент времени  , соответствующий второму переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному:
, соответствующий второму переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному:
Далее определяют значение фазы φa сигнала a(tj)
Одновременно с этим в программаторе 2 (П) определяют номера счетных импульсов mn1 и nn1, при которых происходит первый переход сигнала a(tj) через нулевой уровень от отрицательных значений к положительным, которые также запоминают в блока кольцевой памяти 1 (КП). Данные сигналы с выходов блока кольцевой памяти 1 (КП) поступают на вход программатора 2 (П).
Затем по аналогичной процедуре в программаторе 2 (П) определяют момент времени  , соответствующий первому переходу сигнала b(tj) через нулевой уровень от отрицательного значения к положительному:
, соответствующий первому переходу сигнала b(tj) через нулевой уровень от отрицательного значения к положительному:

Далее определяют номера счетных импульсов mn2 и nn2, при которых происходит второй переход сигнала b(tj) через нулевой уровень от отрицательного значения к положительному. Данные сигналы с выходов блока кольцевой памяти 1 (КП) поступают на вход программатора 2 (П).
Затем в программаторе 2 (П) определяют по аналогичной процедуре момент времени  , соответствующий второму переходу сигнала b(tj) через нулевой уровень от отрицательного значения к положительному:
, соответствующий второму переходу сигнала b(tj) через нулевой уровень от отрицательного значения к положительному:

Значение фазы φb сигнала b(tj) вычисляют по следующему соотношению:
а угол сдвига фаз φa,b между сигналами a(tj) и b(tj) вычисляют по соотношению

С выходов программатора 2 (П) сигнал поступает на соответствующие входы сегментных индикаторов (не показаны на фиг.2).
В качестве примера возьмем два тестовых сигнала несинусоидальной формы вида:

где ω=314 с-1.
При этом период следования счетных импульсов равен 0,625 мс. В программаторе 2 (П) одновременно определяют значения φa и φb:


Затем вычисляют значения угла сдвига фаз φa,b между сигналами a(tj) и b(tj)

Относительную погрешность вычисляют по формуле [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1980. - 976 с.]

где φT - значение угла сдвига фаз между сигналами, полученное путем решения уравнений

где x=ωt для сигнала а(tj) и x1=ωt для сигнала b(tj), а φT определяется по следующему соотношению:

Таким образом, получен простой и точный способ определения сдвига фаз между двумя сигналами.
Предложенное изобретение относится к измерительной технике. Согласно способу определение точек перехода сигналов через нулевой уровень от отрицательных значений к положительным осуществляют путем запоминания каждого цифрового отсчета как текущего a(tj), соответствующего текущему моменту времени tj, так и предыдущего a(tj-1), затем производят сравнение значений отсчетов a(tj-1) и a(tj), на основе которого определяют номера счетных импульсов w и i, соответствующих моментам времени tw и ti, при которых происходит первый переход сигнала a(tj) через нулевой уровень от отрицательного значения к положительному, далее на основе данных отчетов производят линейную интерполяцию сигнала и определяют момент времени tn1, соответствующий первому переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному. Затем по аналогичной процедуре определяют момент времени tn2, соответствующий второму переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному. Далее определяют значение фазы φа первого сигнала. Одновременно с этим по аналогичной процедуре определяют значение фазы φb второго сигнала, а значения угла сдвига фаз между сигналами a(f) и b(t) определяют как разность значений φa и φb. Технический результат - возможность определения углов сдвига фаз между двумя сигналами как синусоидальной, так и несинусоидальной формы, представленными цифровыми отсчетами с постоянным шагом дискретизации. 2 ил.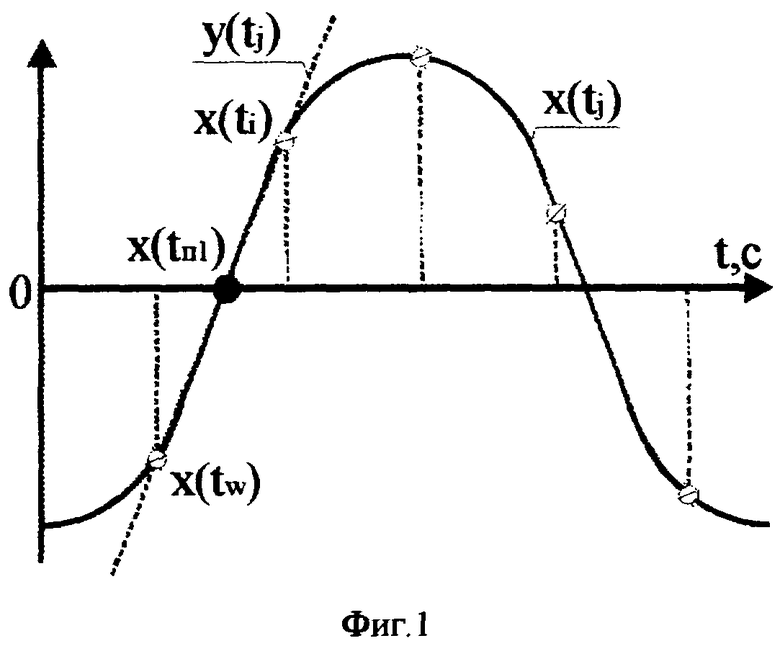
Способ определения угла сдвига фаз между двумя сигналами a(tj) и b(tj), представленными цифровыми отсчетами с постоянным шагом дискретизации, включающий определение точек перехода сигналов через нулевой уровень от отрицательных значений к положительным в течение одного периода этих сигналов, определение угла сдвига фаз между ними, который пропорционален времени между переходами исследуемых сигналов через нулевой уровень от отрицательных значений к положительным, отличающийся тем, что вычисление углов сдвига фаз производят для сигналов, представленных цифровыми отсчетами, а определение точек перехода сигналов через нулевой уровень от отрицательных значений к положительным осуществляют путем запоминания каждого цифрового отсчета как текущего a(tj), соответствующего текущему моменту времени tj, так и предыдущего a(tj-1), затем производят сравнение значений отсчетов a(tj-1) и a(tj), на основе которого определяют номера счетных импульсов w и i, соответствующих моментам времени tw и ti, при которых происходит первый переход сигнала a(tj) через нулевой уровень от отрицательного значения к положительному, далее на основе данных отчетов производят линейную интерполяцию и определяют момент времени tn1, соответствующий первому переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному
затем по аналогичной процедуре определяют момент времени tn2, соответствующего второму переходу сигнала a(tj) через нулевой уровень от отрицательного значения к положительному, далее определяют значение фазы φа первого сигнала
одновременно с этим по аналогичной процедуре определяют значение фазы φb второго сигнала, значения угла сдвига фаз между сигналами a(t) и b(t) определяют как разность значений φa и φb.
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ МЕЖДУ ДВУМЯ СИНУСОИДАЛЬНЫМИ СИГНАЛАМИ | 2004 |
|
RU2264631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ МЕЖДУ ДВУМЯ СИНУСОИДАЛЬНЫМИ СИГНАЛАМИ | 2004 |
|
RU2264630C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СДВИГА ФАЗ МЕЖДУ ДВУМЯ СИНУСОИДАЛЬНЫМИ СИГНАЛАМИ | 2003 |
|
RU2242014C1 |
| RU 2004109897 A, 10.10.2005 | |||
| RU 2004106034 A, 10.08.2005. | |||

