Изобретение относится к области систем обработки информации и может быть использовано при функциональном контроле и диагностировании ЛЭП на основе ее прямой Г-образной адаптивной модели, перестраиваемой по текущей информации о параметрах электрического режима линии.
Известен способ определения текущих параметров электрического режима, например, для построения адаптивной модели ЛЭП [Мурзин П.В., Суворов А.А. Алгоритмы формирования параметров электрического режима в адаптивной модели ЛЭП. // В 38 Вестник УГТУ-УПИ. Энергосистема: управление, качество, конкуренция: Сборник докладов II Всероссийской научно-технической конференции. Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2004. №12 (42). С.424-428], заключающийся в том, что в начале и в конце ЛЭП с помощью регистратора аварийных событий (РАС) получают синхронизированные во времени массивы мгновенных значений токов и напряжений, с помощью или оптоволоконного, или высокочастотного канала связи передают второй массив с конца ЛЭП в ее начало. Для определения параметров модели ЛЭП необходимы следующие параметры электрического режима, полученные в начале и конце линии: токи и напряжения первой гармоники и фазовые углы между ними.
Для получения параметров электрического режима используют известное преобразование Фурье, в соответствии с которым амплитуды и фазы любой гармонической составляющей исходного сигнала определяют по его измеренным мгновенным значениям. При этом приближение исследуемой периодической функции считается наилучшим, так как в качестве коэффициентов тригонометрической суммы используют гармонические коэффициенты Фурье, предварительно найденные как:


где ak - коэффициент при функции косинуса;
bk - коэффициент при функции синуса;
k - номер гармоники;
yi - мгновенное значение сигнала для i-го отсчета;
ti - интервал от начала периода до (i+1)-го отсчета (в единицах отсчетов);
n - количество отсчетов в периоде;
Δti - шаг интегрирования.
Амплитуду и фазу k-й гармоники сигнала вычисляют следующим образом:

где Mk - амплитуда k-й гармоники сигнала;
ψk - фаза k-й гармоники, рад.
В большинстве рассматриваемых задач определение фазы сигнала относительно момента времени начала измерений необходимо и достаточно выполнять только для первой гармоники, то есть значение коэффициента k во всех формулах в данном случае следует принять равным единице.
Находят амплитуды и фазы первых гармоник напряжения и тока в начале и конце линии, по которым производят построение адаптивной модели ЛЭП.
Известный способ определения текущих параметров электрического режима ЛЭП с помощью дискретного преобразования Фурье (ДПФ) для построения адаптивной модели линии электропередачи приведен на фиг.1, где КС - канал связи.
Недостатками известного способа являются многоэтапность и сложность его реализации из-за необходимости использования линейной или параболической аппроксимации мгновенных значений при контроле границ интервала интегрирования.
Известен способ определения текущих параметров электрического режима линии электропередачи для построения ее адаптивной модели [патент РФ №2282201, МПК 7 G01R 25/00, опубл. 20.08.2006, бюл. №23], заключающийся в том, что проводят измерение мгновенных значений сигналов напряжений и токов в начале и в конце линии и передают массивы с конца линии в ее начало по каналу связи (КС).
По массивам отсчетов мгновенных значений тока и напряжения в начале  ,
,  и в конце линии электропередачи
и в конце линии электропередачи  ,
,  (фиг.2), полученным в одни и те же моменты времени tj=t1, t2, ..., tN, с шагом дискретизации
(фиг.2), полученным в одни и те же моменты времени tj=t1, t2, ..., tN, с шагом дискретизации  ,
,
где Т - период сигнала тока (напряжения),
N - число отсчетов на периоде,
одновременно определяют действующие значения напряжения U1, U2 и тока I1, I2 в начале и в конце линии, сохраняют каждый цифровой отсчет как текущий, так и предыдущий, определяют разность и сумму каждой пары текущего и предыдущего значений, перемножают их разность и сумму. Суммируют эти произведения, затем одновременно определяют реактивную мощность в начале линии электропередачи Q1 и реактивную мощность в конце линии электропередачи Q2, а также реактивные квазимощности  и
и  (с помощью теоремы Телледжена [П.Пенфилд и др. Энергетическая теория электрических цепей. / П.Пенфилд, Р.Спенс, С.Дюинкер. - М.: Энергия, 1974. - 152 с.]). Далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 и активную мощность в конце линии P2, определяют активные квазимощности
(с помощью теоремы Телледжена [П.Пенфилд и др. Энергетическая теория электрических цепей. / П.Пенфилд, Р.Спенс, С.Дюинкер. - М.: Энергия, 1974. - 152 с.]). Далее перемножают текущие отсчеты сигналов и определяют их активную мощность в начале линии P1 и активную мощность в конце линии P2, определяют активные квазимощности  и
и  (с помощью теоремы Телледжена). Затем одновременно определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии. Также определяют угол расхождения векторов
(с помощью теоремы Телледжена). Затем одновременно определяют углы расхождения векторов ϕ1 между напряжением U1 и током I1 в начале линии электропередачи, ϕ2 между напряжением U2 и током I2 в конце линии. Также определяют угол расхождения векторов  между напряжением U1 в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов
между напряжением U1 в начале линии электропередачи и между напряжением U2 в ее конце и угол расхождения векторов  между током I1 в начале линии электропередачи и между током I2 в конце линии.
между током I1 в начале линии электропередачи и между током I2 в конце линии.
Полученные значения ϕ1, ϕ2, U1, U2,  I2, I1, являются исходными данными при создании адаптивной модели ЛЭП.
I2, I1, являются исходными данными при создании адаптивной модели ЛЭП.
Недостатком этого способа является многоэтапность его реализации из-за необходимости определения углов расхождения векторов ϕ1, ϕ2, и действующих значений напряжения U1, U2 и тока I1, I2, а также трудность непосредственного определения текущих параметров ЛЭП.
Известен способ определения текущих параметров электрического режима линии электропередачи для построения ее Г-образной адаптивной модели [патент РФ №2289823, МПК 7 G01R 27/04, G01R 27/08, опубл. 20.12.2006, бюл. №35], выбранный в качестве прототипа, заключающийся в том, что проводят измерение мгновенных значений сигналов напряжений и токов в начале и в конце линии и передают массивы с конца линии в ее начало по каналу связи (КС).
По массивам отсчетов мгновенных значений тока и напряжения в начале , и в конце линии электропередачи , (фиг.3), полученным в одни и те же моменты времени tj=t1, t2, ..., tN, с шагом дискретизации ,
где Т - период сигнала тока (напряжения),
N - число отсчетов на периоде,
одновременно определяют разности массивов мгновенных значений токов и напряжений начала и конца линии электропередачи, сохраняют каждый цифровой отсчет, как текущий, так и предыдущий, определяют разность и сумму каждой пары текущего и предыдущего значений, перемножают их разность и сумму, суммируют эти произведения, затем определяют потери реактивных мощностей в продольном и поперечном реактивных сопротивлениях, далее перемножают текущие отсчеты сигналов и определяют потери активных мощностей в продольном и поперечном активных сопротивлениях, одновременно определяют действующие значения токов в продольной и поперечной ветвях, затем одновременно определяют активные и реактивные сопротивления продольной и поперечной ветвей.
Недостатками известного способа являются многоэтапность, трудность непосредственного определения текущих первичных и вторичных параметров прямой Г-образной адаптивной модели ЛЭП.
Задачей изобретения является создание простого, точного, информативного способа определения текущих первичных и вторичных параметров линии электропередачи для построения ее прямой Г-образной адаптивной модели.
Это достигается тем, что в способе определения текущих первичных и вторичных параметров линии электропередачи для построения ее прямой Г-образной адаптивной модели, так же как в прототипе, измеряют мгновенные значения сигналов напряжения и тока, эти массивы отсчетов мгновенных значений тока и напряжения в начале , и в конце линии электропередачи , , полученные в одни и те же моменты времени tj=t1, t2, ..., tN, с шагом дискретизации ,
где T - период сигнала тока/напряжения;
N - число отсчетов на периоде Т,
передают с конца линии в ее начало по каналу связи, по измеренным массивам отсчетов мгновенных значений тока и напряжения сохраняют пары цифровых отсчетов токов и напряжений как текущие, определяют разность пар текущих цифровых отсчетов токов и напряжений, определяют значение потери активной мощности на активном сопротивлении продольной ветви линии электропередачи, одновременно определяя действующее значение сигнала в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви, затем определяют значение активного и реактивного сопротивлений продольной ветви линии электропередачи, далее определяют значение потери активной мощности на активном сопротивлении поперечной ветви линии электропередачи, одновременно определяя действующее значение сигнала тока в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви, затем определяют значение активного и реактивного сопротивлений поперечной ветви линии электропередачи. Согласно изобретению дополнительно одновременно определяют значения коэффициентов затухания тока и напряжения и значения коэффициентов сдвига фазы тока и сдвига фазы напряжения, затем одновременно определяют на единицу длины линии электропередачи значения активных и реактивных сопротивлений продольной и поперечной ветвей, значения коэффициентов затухания тока и напряжения, значения коэффициентов сдвига фазы тока и сдвига фазы напряжения, которые принимают в качестве конечных результатов.
Полученные значения R1(0), X1(0), R0(0), X0(0), βU(0), βI(0), αU(0), αI(0) являются исходными данными при создании прямой Г-образной адаптивной модели ЛЭП.
Простота и точность предложенного способа заключается в том, что первичные и вторичные параметры прямой Г-образной адаптивной модели линии электропередачи определяют непосредственно (напрямую), они соответствуют режиму линии, не требуется проведение дополнительных вычислений, вносящих погрешность, исследования проводились для заведомо известных первичных и вторичных параметров прямой Г-образной модели ЛЭП.
Предложенный способ является информативным за счет того, что позволяет определять первичные и вторичные параметры прямой Г-образной адаптивной модели линии электропередачи на единицу длины линии.
На фиг.1 изображена структурная схема реализации способа определения текущих параметров электрического режима ЛЭП для построения ее адаптивной модели, основанного на дискретном преобразовании Фурье (ДПФ).
На фиг.2 представлена структурная схема реализации способа определения текущих параметров электрического режима ЛЭП для построения ее адаптивной модели.
На фиг.3 приведена структурная схема реализации способа определения текущих параметров электрического режима линии электропередачи для построения ее Г-образной адаптивной модели.
На фиг.4 приведена структурная схема реализации предложенного способа определения текущих первичных и вторичных параметров линии электропередачи для построения ее прямой Г-образной адаптивной модели по массивам отсчетов мгновенных значений токов и напряжений.
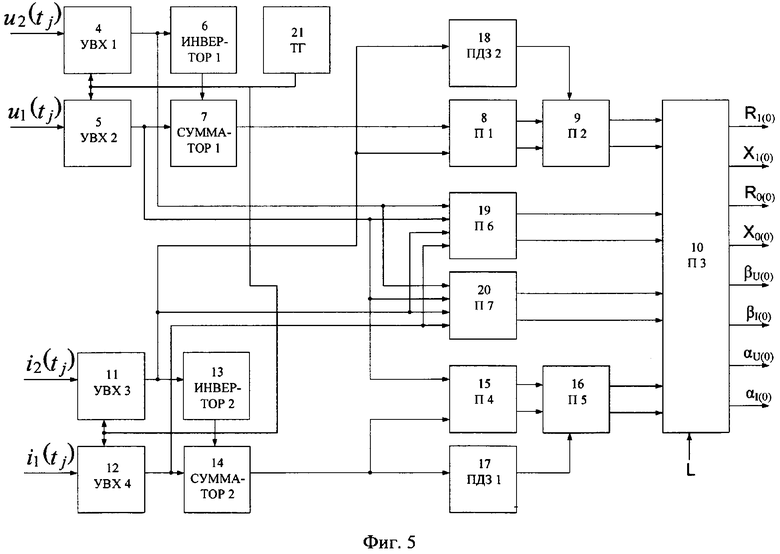
На фиг.5 изображена аппаратная схема блока устройства, реализующего рассматриваемый способ определения текущих первичных и вторичных параметров ЛЭП для построения ее прямой Г-образной адаптивной модели.
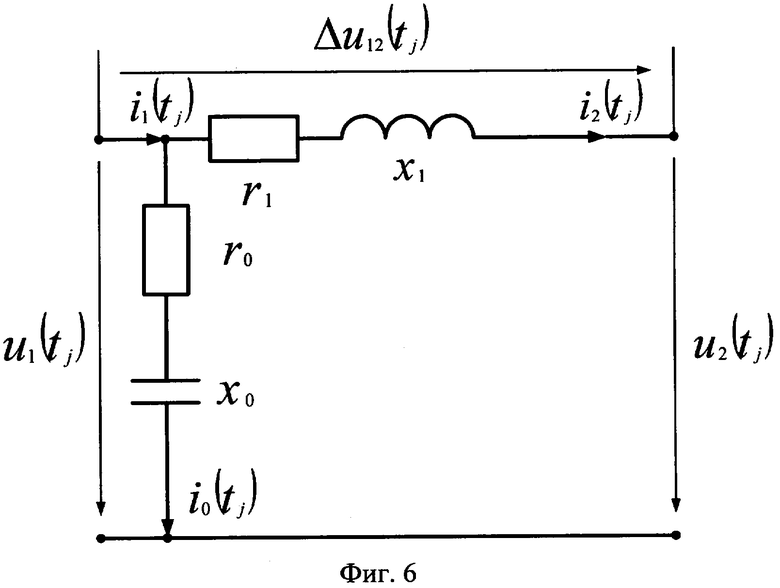
На фиг.6 изображена прямая Г-образная схема замещения линии электропередачи.
В табл.1 приведены цифровые отсчеты мгновенных значений напряжений и токов в начале и в конце линии , , , в режиме нагрузки.
В табл.2 и 3 приведены результаты расчета первичных и вторичных параметров прямой Г-образной адаптивной модели ЛЭП.
Способ может быть осуществлен с помощью устройства, представленного на фиг.4. В начале и в конце ЛЭП 1 установлены регистраторы аварийных ситуаций (на фиг.4 не показаны) для создания массивов мгновенных значений токов и напряжений начала и конца линии электропередачи с шагом дискретизации Δt. Устройство для определения текущих параметров ЛЭП состоит из одного блока 2 расчета R1(0), X1(0), R0(0), X0(0), βU(0), βI(0), αU(0), αI(0). Входы этого блока расчета связаны через канал связи (КС) с регистраторами аварийных ситуаций в начале и в конце линии электропередачи, а выходы блока расчета 2 подключены к ЭВМ 3.
Блок расчета 2 (фиг.5) состоит из первого 4 (УВХ 1) и второго 5 (УВХ 2) устройств выборки и хранения, входы которых подключены к регистраторам аварийных ситуаций. К первому устройству выборки-хранения 4 (УВХ 1) последовательно подключены первый инвертор 6, первый сумматор 7. Ко второму устройству выборки-хранения 5 (УВХ 2) последовательно подключены первый сумматор 7, первый программатор 8 (П 1), второй программатор 9 (П 2), третий программатор 10 (П 3), выходы которого подключены к ЭВМ 3. Входы третьего 11 (УВХ 3) и четвертого 12 (УВХ 4) устройств выборки-хранения подключены к регистраторам аварийных ситуаций. К третьему устройству выборки-хранения 11 (УВХ 3) последовательно подключены второй инвертор 13, второй сумматор 14. К четвертому устройству выборки-хранения 12 (УВХ 4) последовательно подключены второй сумматор 14, четвертый программатор 15 (П 4), пятый программатор 16 (П 5), выходы которого подключены к третьему программатору 10 (П 3). Вход третьего программатора 10 (П 3) соединен с кнопочной клавиатурой (на фиг.5 не показана). К выходу второго сумматора 14 подсоединен первый программатор действующих значений 17 (ПДЗ 1), связанный с пятым программатором 16 (П 5). Выход третьего устройства выборки-хранения 11 (УВХ 3) подключен к первому программатору 8 (П 1) и ко второму программатору действующих значений 18 (ПДЗ 2), связанному со вторым программатором 9 (П 2). К первому устройству выборки-хранения 4 (УВХ 1) подсоединены шестой 19 (П 6) и седьмой 20 (П 7) программаторы, выходы которых связаны с третьим программатором 10 (П 3). Кроме того, к первому устройству выборки-хранения 4 (УВХ 1) подключен четвертый программатор 15 (П 4). Ко второму устройству выборки-хранения 5 (УВХ 2) подключены шестой 19 (П 6) и седьмой 20 (П 7) программаторы. Кроме того, третье устройство выборки-хранения 11 (УВХ 3) связано с шестым 19 (П 6) и седьмым 20 (П 7) программаторами. К четвертому устройству выборки-хранения 12 (УВХ 4) подсоединены шестой 19 (П 6) и седьмой 20 (П 7) программаторы. К каждому устройству выборки-хранения подсоединен тактовый генератор 21 (ТГ).
Все устройства выборки-хранения реализованы на микросхемах 1100СК2. Программаторы действующих значений и программаторы выполнены на микроконтроллере серии 51 производителя atmel AT89S53. Инверторы и сумматоры реализованы на операционных усилителях 140УД17А. Тактовый генератор 21 (ТГ) может быть реализован на микроконтроллере АТ80С2051.
Для исследования была выбрана воздушная линия электропередачи 220 кВ протяженностью 80 км, выполненная проводом АС-240/32.
На входы блока 2 расчета R1(0), X1(0), R0(0), X0(0), βU(0), βI(0), αU(0), αI(0) устройства, реализующего способ определения текущих первичных и вторичных параметров линии электропередачи для построения ее прямой Г-образной адаптивной модели, от регистраторов аварийных ситуаций подают одновременно сигналы , , , на входные шины блока 2 расчета R1(0), X1(0), R0(0), X0(0), βU(0), βI(0), αU(0), αI(0),
где - массив отсчетов мгновенных значений напряжения в начале линии электропередачи,
- массив отсчетов мгновенных значений тока в начале ЛЭП,
- массив отсчетов мгновенных значений напряжения в конце линии,
- массив отсчетов мгновенных значений тока в конце линии электропередачи.
На блок 2 расчета R1(0), X1(0), R0(0), X0(0), βU(0), βI(0), αU(0), αI(0) на вход первого устройства выборки-хранения 4 (УВХ 1) поступает сигнал u2(tj), на вход второго устройства выборки-хранения 5 (УВХ 2) сигнал u1(tj), а на вход третьего устройства выборки-хранения 11 (УВХ 3) сигнал i2(tj), а на вход четвертого устройства выборки-хранения 12 (УВХ 4) сигнал i1(tj),
где tj=t1, t2, ..., tN - моменты времени,
 - число разбиений на периоде Т,
- число разбиений на периоде Т,
Δt=0,625·10-3 с - шаг дискретизации массивов мгновенных значений тока/напряжения в начале и в конце ЛЭП.
Массивы значений сигналов с ЛЭП представлены в табл.1. Значения сигналов записывают в блоки выборки-хранения 4 (УВХ 1), 5 (УВХ 2), 11 (УВХ 3) и 12 (УВХ 4) и хранят там, как текущие, затем с выхода устройства выборки-хранения 4 (УВХ 1) сигнал u2(tj) поступает на инвертор 6, в программаторы 19 (П 6) и 20 (П 7). С помощью инвертора 6 отрицательное значение предыдущего сигнала u2(tj) преобразовывают в положительное. С выхода инвертора 6 значение сигнала u2(tj) поступает на вход сумматора 7. В то же время с выхода устройства выборки-хранения 5 (УВХ 2) значение сигнала u1(tj) поступает на второй вход сумматора 7, в программаторы 15 (П 4), 19 (П 6) и 20 (П 7). С помощью сумматора 7 определяют разность значений сигналов u1(tj)-u2(tj). С выхода сумматора 7 разность значений сигналов u1(tj)-u2(tj) поступает в программатор 8 (П 1). Одновременно значение сигнала i2(tj) поступает в блок выборки-хранения 11 (УВХ 3), а значение сигнала i1(tj) поступает в блок выборки-хранения 12 (УВХ 4). Значения сигналов, записанные в блоки выборки-хранения 11 (УВХ 3) и 12 (УВХ 4), хранят там, как текущие. Затем с выхода устройства выборки-хранения 11 (УВХ 3) сигнал i2(tj) поступает в программаторы 8 (П 1), 19 (П 6), 20 (П 7), в программатор действующих значений 18 (ПДЗ 2) и на инвертор 13. С помощью инвертора 13 отрицательное значение предыдущего сигнала i2(tj) преобразовывают в положительное. С выхода инвертора 13 значение сигнала i2(tj) поступает на вход сумматора 14. В то же время с выхода устройства выборки-хранения 12 (УВХ 4) значение сигнала i1(tj) поступает в программаторы 19 (П 6), 20 (П 7) и на второй вход сумматора 14. С помощью сумматора 14 определяют разность значений сигналов i1(tj)-i2(tj). С выхода сумматора 14 разность значений сигналов i1(tj)-i2(tj) поступает в программатор 15 (П 4) и программатор действующих значений 17 (ПДЗ 1). С помощью первого программатора 8 (П 1) определяют значения потери активной мощности ΔP12 на продольном активном сопротивлении R1 линии электропередачи и потери реактивной мощности ΔQ12 на продольном реактивном сопротивлении X1 линии:
 (табл.2),
(табл.2),
 (табл.2).
(табл.2).
С выходов первого программатора 8 (П 1) значения потерь активной и реактивной мощностей поступают на входы второго программатора 9 (П 2). В то же время с помощью второго программатора действующих значений 18 (ПДЗ 2) определяют действующее значение сигнала I2:
 (табл.2).
(табл.2).
С выхода второго программатора действующих значений 18 (ПДЗ 2) значение сигнала I2 поступает на вход второго программатора 9 (П 2). С помощью второго программатора 9 (П 2) определяют значения продольных активного R1 реактивного X1 сопротивлений линии электропередачи (фиг.6):
 (табл.2),
(табл.2),
 (табл.2).
(табл.2).
Одновременно с помощью шестого программатора 19 (П 6) определяют значение коэффициента сдвига фазы тока β1 и коэффициента сдвига фазы напряжения βU:
 (табл.2);
(табл.2);
 (табл.3).
(табл.3).
В то же время с помощью седьмого программатора 20 (П 7) определяют значение коэффициента затухания тока αI и коэффициента затухания напряжения αU:
или  (табл.3)
(табл.3)
или 
(табл.3);
или  (табл.3)
(табл.3)
или  (табл.3).
(табл.3).
С помощью четвертого программатора 15 (П 4) определяют значения потери активной мощности ΔP0 на поперечном активном сопротивлении R0 линии электропередачи и потери реактивной мощности ΔQ0 на поперечном реактивном сопротивлении X0 линии:
 (табл.2),
(табл.2),
 (табл.2).
(табл.2).
С выходов четвертого программатора 15 (П 4) значения потерь активной и реактивной мощностей поступают на входы пятого программатора 16 (П 5). В то же время с помощью первого программатора действующих значений 17 (ПДЗ 1) определяют действующее значение сигнала I0:
 (табл.2).
(табл.2).
С выхода первого программатора действующих значений 17 (ПДЗ 1) значение сигнала I0 поступает на вход пятого программатора 16 (П 5). С помощью пятого программатора 16 (П 5) определяют значения поперечных активного R0, реактивного Х0 сопротивлений линии электропередачи (фиг.6):
 (табл.2),
(табл.2),
 (табл.2).
(табл.2).
С выходов программаторов 9 (П 2), 19 (П 6), 20 (П 7) и 16 (П 5) значения сигналов R1, X1, R0, X0, βU, βI, αU, αI поступают на входы третьего программатора 10 (П 3). В третий программатор 10 (П 3) вводят значение длины линии электропередачи L. С помощью третьего программатора 10 (П 3) определяют значения этих сигналов на единицу длины линии электропередачи:
 (табл.3),
(табл.3),  (табл.3);
(табл.3);
 (табл.3),
(табл.3),  (табл.3);
(табл.3);
или  (табл.3), или
(табл.3), или  (табл.3);
(табл.3);
или  (табл.3), или
(табл.3), или  (табл.3);
(табл.3);
 (табл.3),
(табл.3),  (табл.3).
(табл.3).
Таким образом, получен простой, точный и информативный способ определения текущих первичных и вторичных параметров линии электропередачи для построения ее прямой Г-образной адаптивной модели.
Табл. 1
Табл.2



Изобретение относится к области систем обработки информации и может быть использовано при функциональном контроле и диагностировании ЛЭП. Способ определения текущих первичных и вторичных параметров электрического режима линии электропередачи для построения ее прямой Г-образной адаптивной модели заключается в том, что проводят измерение мгновенных значений сигналов тока и напряжения. Эти массивы отсчетов мгновенных значений тока и напряжения в начале  ,
,  и в конце линии электропередачи
и в конце линии электропередачи  ,
,  , полученные в одни и те же моменты времени tj=t1, t2,..., tN, с шагом дискретизации
, полученные в одни и те же моменты времени tj=t1, t2,..., tN, с шагом дискретизации  , где Т - период сигнала тока/напряжения; N - число отсчетов на периоде Т, передают линии в ее начало по каналу связи. Далее по измеренным массивам отсчетов мгновенных значений тока и напряжения сохраняют пары цифровых отсчетов токов и напряжений как текущие, определяют разность пар текущих цифровых отсчетов токов и напряжений. Затем определяют значение потери активной мощности на активном сопротивлении продольной ветви линии электропередачи, одновременно определяя действующее значение сигнала в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви. Далее определяют значение активного и реактивного сопротивлений продольной ветви линии электропередачи. Затем определяют значение потери активной мощности на активном сопротивлении поперечной ветви линии электропередачи, одновременно определяя действующее значение сигнала тока в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви. Далее определяют значение активного и реактивного сопротивлений поперечной ветви линии электропередачи. Затем дополнительно одновременно определяют значения коэффициентов затухания тока и напряжения и значения коэффициентов сдвига фазы тока и сдвига фазы напряжения. Далее одновременно определяют на единицу длины линии электропередачи значения активных и реактивных сопротивлений продольной и поперечной ветвей, значения коэффициентов затухания тока и напряжения, значения коэффициентов сдвига фазы тока и сдвига фазы напряжения, которые принимают в качестве конечных результатов. Технический результат - упрощение, повышение точности и информативности. 6 ил., 3 табл.
, где Т - период сигнала тока/напряжения; N - число отсчетов на периоде Т, передают линии в ее начало по каналу связи. Далее по измеренным массивам отсчетов мгновенных значений тока и напряжения сохраняют пары цифровых отсчетов токов и напряжений как текущие, определяют разность пар текущих цифровых отсчетов токов и напряжений. Затем определяют значение потери активной мощности на активном сопротивлении продольной ветви линии электропередачи, одновременно определяя действующее значение сигнала в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви. Далее определяют значение активного и реактивного сопротивлений продольной ветви линии электропередачи. Затем определяют значение потери активной мощности на активном сопротивлении поперечной ветви линии электропередачи, одновременно определяя действующее значение сигнала тока в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви. Далее определяют значение активного и реактивного сопротивлений поперечной ветви линии электропередачи. Затем дополнительно одновременно определяют значения коэффициентов затухания тока и напряжения и значения коэффициентов сдвига фазы тока и сдвига фазы напряжения. Далее одновременно определяют на единицу длины линии электропередачи значения активных и реактивных сопротивлений продольной и поперечной ветвей, значения коэффициентов затухания тока и напряжения, значения коэффициентов сдвига фазы тока и сдвига фазы напряжения, которые принимают в качестве конечных результатов. Технический результат - упрощение, повышение точности и информативности. 6 ил., 3 табл.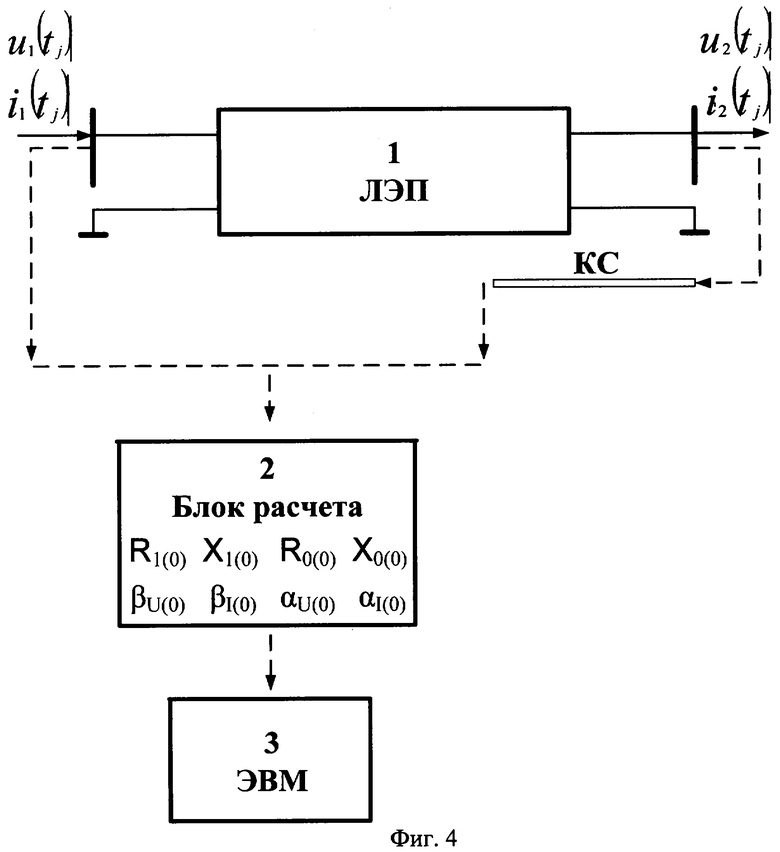
Способ определения текущих первичных и вторичных параметров линии электропередачи для построения ее прямой Г-образной адаптивной модели, заключающийся в том, что проводят измерение мгновенных значений сигналов напряжения и тока, эти массивы отсчетов мгновенных значении тока и напряжения в начале  ,
,  и в конце линии электропередачи
и в конце линии электропередачи  ,
,  , полученные в одни и те же моменты времени tj=t1, t2,..., tN, с шагом дискретизации
, полученные в одни и те же моменты времени tj=t1, t2,..., tN, с шагом дискретизации  ,
,
где Т - период сигнала тока/напряжения;
N - число отсчетов на периоде Т,
передают с конца линии в ее начало по каналу связи, по измеренным массивам отсчетов мгновенных значений тока и напряжения сохраняют пары цифровых отсчетов токов и напряжений как текущие, определяют разность пар текущих цифровых отсчетов токов и напряжений, определяют значение потери активной мощности на активном сопротивлении продольной ветви линии электропередачи, одновременно определяя действующее значение сигнала в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви, затем определяют значение активного и реактивного сопротивлений продольной ветви линии электропередачи, далее определяют значение потери активной мощности на активном сопротивлении поперечной ветви линии электропередачи, одновременно определяя действующее значение сигнала тока в ней и значение потери реактивной мощности на реактивном сопротивлении этой ветви, затем определяют значение активного и реактивного сопротивлений поперечной ветви линии электропередачи, отличающийся тем, что дополнительно одновременно определяют значения коэффициентов затухания тока и напряжения и значения коэффициентов сдвига фазы тока и сдвига фазы напряжения, затем одновременно определяют на единицу длины линии электропередачи значения активных и реактивных сопротивлений продольной и поперечной ветвей, значения коэффициентов затухания тока и напряжения, значения коэффициентов сдвига фазы тока и сдвига фазы напряжения, которые принимают в качестве конечных результатов.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕКУЩИХ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОГО РЕЖИМА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ДЛЯ ПОСТРОЕНИЯ ЕЕ Г-ОБРАЗНОЙ АДАПТИВНОЙ МОДЕЛИ | 2005 |
|
RU2289823C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕКУЩИХ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОГО РЕЖИМА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ДЛЯ ПОСТРОЕНИЯ ЕЕ АДАПТИВНОЙ МОДЕЛИ | 2005 |
|
RU2282201C1 |
| Устройство для подачи грузов на транспортер | 1931 |
|
SU27340A1 |
| Способ регулирования мощности емкостной компенсации | 1988 |
|
SU1610541A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| US 4851782 A, 25.07.1989. | |||

