Предшествующий уровень техники
Передатчики регулируемого параметра используются для измерения регулируемых параметров и обеспечения электрических выходов, которые представляют собой значения регулируемых параметров. Поскольку электронные и измерительные компоненты в передатчиках регулируемых параметров все более и более миниатюризируются и добавляются дополнительные функции к передатчикам, электрическая схема внутри передатчика становится очень компактной, вызывая проблемы с управлением дополнительной мощностью, шумом и помехами внутри передатчика.
В двухпроводных передатчиках HART, которые также включают в себя линию приемопередачи локальной сети контроллеров (CAN), существует проблема с шумом, который воздействует на электрическую схему датчика нижнего уровня. Следовательно, в электрической схеме датчика в миниатюрных двухпроводных передатчиках регулируемых параметров, которые включают в себя двустороннюю линию передачи CAN, существует необходимость обеспечить лучшую защиту от шума.
Существует также проблема с удовлетворением подачи питания, необходимого электрической схеме CAN и другой электрической схеме передатчика, от цепи питания, которая не соответствует нуждам подачи питания.
Следовательно, необходимы передатчики, которые решают эти проблемы. Варианты осуществления настоящего изобретения обеспечивают решения этих и других проблем, а также предлагают другие преимущества по сравнению с уровнем техники.
Сущность изобретения
Раскрывается передатчик регулируемого параметра (переменной процесса), содержащий выходную схему передатчика, которая обеспечивает двунаправленные линии приемопередачи сигналов HART и локальной сети контроллеров. Выходная схема передатчика также содержит контакты подключения схемы датчика.
Изолированная схема подключена к контактам подключения схемы датчика. Изолированная схема содержит электрическую схему датчика, измеряющую регулируемый параметр (переменную процесса). Изолированная схема далее содержит гальванический изолирующий барьер, который гальванически изолирует электрическую схему датчика от линий приемопередачи HART и локальной сети контроллеров.
Другие особенности и преимущества, которые характеризуют варианты осуществления настоящего изобретения, будут очевидны после прочтения последующего подробного описания и просмотра сопутствующих чертежей.
Краткое описание чертежей
Фиг. 1 иллюстрирует электрические соединения между платами схем в двухпроводном передатчике регулируемых параметров, который включает в себя линии приемопередачи HART и CAN.
Фиг. 2 иллюстрирует блок-схему платы датчика в передатчике регулируемого параметра.
Фиг. 3 иллюстрирует схему платы RFI в передатчике регулируемого параметра.
Фиг. 4 иллюстрирует электрическую схему локальной сети контроллеров (CAN) на выходной плате в передатчике регулируемого параметра.
Фиг. 5А и 5В иллюстрируют электрическую схему доминантно-рецессивного управления CAN на плате CAN в передатчике регулируемого параметра.
Фиг. 6 иллюстрирует гальванически изолированную двустороннюю последовательную схему связи.
Фиг. 7 иллюстрирует гальванически изолированное питание.
Фиг. 8 наглядно иллюстрирует передатчик регулируемого параметра.
Фиг. 9А и 9В иллюстрируют упрощенную схему передатчика регулируемого параметра, характеризующегося многоуровневой подачей питания.
Фиг. 10 иллюстрирует ограничитель тока для рецессивного каскада схемы CAN.
Фиг. 11 иллюстрирует электрическую схему питания, используемую при сохранении данных конфигурации CAN.
Фиг. 12 иллюстрирует электрическую схему питания, которая изолирует импульсные всплески.
Фиг. 13 иллюстрирует упрощенную временную диаграмму подачи энергии передатчика, который включает в себя схему CAN.
Подробное описание предпочтительных вариантов осуществления
В вариантах осуществления, описанных ниже, уменьшаются проблемы, связанные с управлением энергией, шумом и помехами в высокоплотной электрической схеме в передатчике регулируемого параметра с двусторонней линией CAN. Электрическая схема измерения низкого уровня используется для заземления, а гальванический изолирующий барьер обеспечивается между электрической схемой измерения и двусторонними линиями связи HART и локальной сети контроллеров (CAN). Двусторонние линии связи HART и CAN не способны вносить шум в электрические схемы измерения низкого уровня, и передатчик может получить преимущество миниатюризации компонент, позволяющее создать компактный передатчик.
Многоуровневая подача питания позволяет току протекать через электрическую схему CAN, а другим нагрузкам передатчика превысить минимальное значение тока контура через повторное использование тока.
Фиг. 1 иллюстрирует схему внутреннего соединения промышленного передатчика 100 регулируемого параметра согласно примерному варианту осуществления. Передатчик 100 регулируемого параметра включает в себя печатные платы, такие как плата 200 датчика, плата 300 RFI, выходная плата 400 и плата 500 CAN, которые электрически соединены для обеспечения функций передатчика. Передатчик 100 соединен с входным патрубком 102 жидкой среды и распознает параметры процесса, такие как давление, температура, расход или другие параметры, технологической жидкой среды во входном патрубке 102 среды.
Передатчик 100 включает в себя контурные выводы 104 и 106 для подключения к промышленной цепи управления процессом (показана на Фиг. 3), которая является внешней для передатчика 100. Передатчик 100 может включать в себя вывод 108 заземления для подключения передатчика 100 к заземлению (показано на Фиг. 3). Передатчик включает в себя корпус 112, который подключен к заземлению посредством вывода 108 заземления. Корпус 112 может быть подключен к заземлению через входной патрубок 102. Передатчик 100 включает в себя приемопередающий вывод 114 CAN для подключения одного или нескольких устройств CAN (показано на Фиг. 3), которые являются внешними для передатчика 100.
Контурные выводы 104 и 106 представляют собой двусторонние линии связи HART для соединения с внешним устройством, которое совместимо с линией связи HART. Вывод 114 CAN представляет собой двустороннюю линию локальной сети контроллеров для соединения с внешним устройством, которое совместимо с линией связи CAN.
В предпочтительном варианте осуществления выводы 104, 106, 108 и 114 представляют собой тонкопроволочные выводы, однако также могут быть использованы другие устройства электрического соединения, такие как навинчивающиеся клеммы, сжимаемые клеммы, многоштыревые разъемы и другие.
Передатчик 100 представляет собой двухпроводной передатчик в связи с тем, что он представляет собой электронный передатчик, который использует два провода питания 104 и 106 для передачи сигналов. Двухпроводной передатчик 100 также включает в себя вывод 108 заземления и вывод 114 приемопередачи CAN.
Плата 500 CAN включает в себя контакты J4A-1 - J4A-8, которые подключаются посредством разъема 502 к соответствующим пронумерованным контактам J4-1 - J4-8 на выходной плате 400. Плата 200 датчика включает в себя контакты J5-1 - J5-8, которые подключаются разъемом 202 к соответствующим пронумерованным контактам J2-1 - J2-8 на выходной плате 400. Контакты J5-1 - J5-8 платы датчика содержат контакты подключения схемы датчика. Плата 200 датчика предпочтительно включает в себя гальванический барьер 204, который изолирует электрическую схему платы датчика, которая соединена с разъемом 202, от изолированной схемы 201 на плате 200 датчика, которая соединена с заземлением. Плата 200 датчика содержит изолированную схему, соединенную с контактами подключения схемы датчика.
Выходная плата 400 включает в себя контакты J1-1 - J1-8, которые подключаются разъемом 402 к соответствующим пронумерованным контактам J1-1 - J1-8 на плате 300 RFI. Разъемы 202, 402 и 502 могут содержать гибкие плоские кабели с контактами в ряд или другие известные разъемы, чтобы создать соединение между печатными платами.
Примеры электрической схемы на печатных платах 200, 300, 400 и 500 описываются ниже со ссылками на Фиг. 2-7, 9-12. Специалисту будет понятно, что компоновка, показанная на Фиг. 1, является лишь примерной и что число и тип печатных плат в передатчике может меняться от того, что показано, в зависимости от конкретного регулируемого параметра, который измеряется, и нужд конкретного применения.
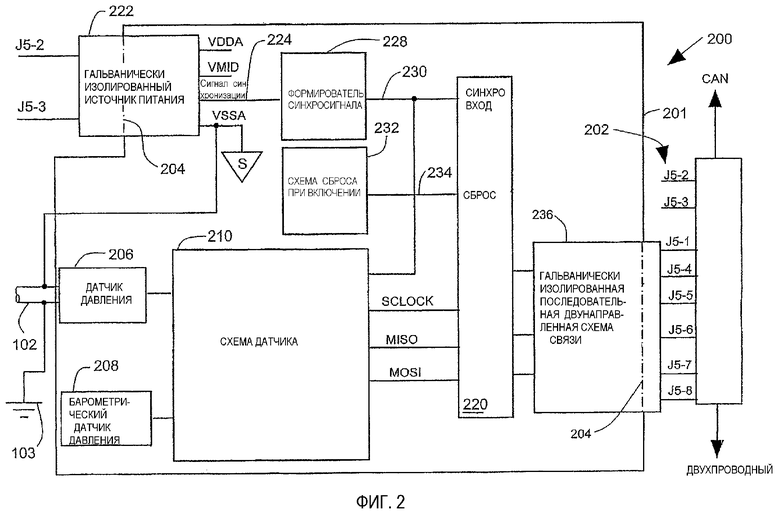
Фиг. 2 иллюстрирует блок-схему примерного осуществления платы 200 датчика. Изолированная схема 201 на плате 200 датчика гальванически изолируется от контактов J5-1 - J5-8. Датчик 206 давления соединен с патрубком 102 технологической линии для измерения давления процесса. Патрубок 102 обычно включает в себя металлический патрубок с резьбой, который соединяется с заземлением 103. Между патрубком 102 и датчиком 206 давления существует необходимость в гидроразъеме. Будет существовать разность потенциалов из-за шумовой связи между заземлением и электрической схемой датчика, если электрическая схема датчика будет иметь омические соединения с линией передачи CAN вместо гальванической развязки. Второй датчик 208 давления предпочтительно содержит датчик абсолютного давления и измеряет барометрическое давление или второе давление процесса. Хотя датчики 206 и 208 показаны как включенные в плату 200 датчика, специалисту будет понятно, что расположение и число датчиков может изменяться в зависимости от типа регулируемого параметра, который измеряется, и что датчики могут быть расположены на печатной плате, как показано, или могут альтернативно быть смонтированы на корпусе 112 передатчика (Фиг. 1).
Датчики 206 и 208 подключены к схеме 210 датчика, которая возбуждает датчики 206 и 208, обеспечивает данные на линиях 214 и 216 и соединяет выходы датчика с микроконтроллером 220 через последовательную шину SPI связи, которая включает в себя линии SCLOCK, MISO и MOSI, как показано на Фиг. 2. Схема 210 датчика предпочтительно содержит многоканальную схему аналого-цифрового конвертора сигма-дельта. Микроконтроллер 220 предпочтительно содержит микроконтроллер National Semiconductor COP8SGE728M8, запрограммированный чтобы обеспечить преобразование протокола связи с протокола SPI на протокол SCI.
Гальванически изолированный источник 222 питания возбуждает изолированную электрическую схему 201 на плате 200 датчика питающими шинами VDDA, VMID и VSSA и также обеспечивает сигнал 224 синхронизации. Гальванически изолированный источник 222 питания включает в себя изолирующий трансформатор (такой, как показан на Фиг. 7), который является частью гальванического изолирующего барьера 204, который гальванически изолирует контакты J5-1 - J5-8, которые опосредованно соединены с линиями передачи HART и CAN, от изолирующей электрической схемы 201 нижнего уровня на плате 200 датчика. Электрическая схема 201 нижнего уровня на плате 200 датчика соединена с корпусом 112, который обычно соединен с заземлением 103.
Контакты J5-2,3 на источнике 222 питания подключены к электрической схеме (на выходной плате 400), которые именуются контурными контактами 104 и 106. Гальваническая изоляция, обеспеченная изоляцией в изолирующем трансформаторе, формирует электрически изолирующий барьер между контактами J5-2,3 и заземлением 103.
Сигнал 224 синхронизации поступает на формирователь 228 синхросигнала. Формирователь 228 синхронизации обеспечивает вывод 230 синхросигнала, пригодного для использования в качестве ввода синхронизации микроконтроллера 220 (преобразователь протокола) и схемы 210 датчика. Схема 232 сброса по включению питания обеспечивает сигнал 234 сброса по включению питания для входа сброса микроконтроллера 220.
Питающая шина VSSA предпочтительно соединена с корпусом 112, так что корпус 100 передатчика и патрубок 102 не способны производить емкостной шум от среды, окружающей передатчик 100, на электрической схеме нижнего уровня на плате 200 датчика. При таком расположении электрическая схема низкого уровня на плате 200 датчика эффективно окружается электростатическим шитом, который представляет собой металлический корпус 112.
Микроконтроллер 220 (преобразователь протокола) подает входные и выходные данные для платы 200 датчика через гальванически изолированную последовательную двустороннюю схему 236 связи. Схема 236 включает в себя изолирующий трансформатор (такой, как показан на Фиг. 6), который является частью гальванического барьера 204. Гальванический барьер 204 изолирует электрическую схему на плате 200 датчика от контактов J5-1 - J5-8. При гальванической изоляции в передатчике 100 не существует электрических токопроводящих дорожек между контактами J5-1 - J5-8 и электрической схемой нижнего уровня на плате 200 датчика. Гальванический изолирующий барьер позволяет электрической схеме нижнего уровня на плате 200 датчика быть соединенной с заземленным металлическим корпусом 112 для защиты от шума, в то время как схемы высшего уровня в передатчике 100 подключаются к контурным клеммам 104 и 106, чтобы избежать побочных токов заземления. Гальванический изолирующий барьер 204 предотвращает побочные токи заземления между токовым контуром и заземлением. Гальваническая изоляция может также быть выполнена использованием оптических изоляторов вместо изолирующего трансформатора. Однако информация и питание проходят через гальванический барьер, а электрические токи блокируются и не проходят через гальванический барьер.
Фиг. 3 иллюстрирует примерный вариант осуществления платы 300 RFI. Плата 300 RFI подключена через двухпроводную цепь 301 управления процессом к контурному приемнику 302, который находится за пределами передатчика 100. Контурный приемник 302 обычно представляет собой входной канал системы управления процессом, который предоставляет ток, возбуждающий передатчик 100. Контурный приемник 302 предпочтительно распознает величину контурного тока в передах 4-20 мА, управляемого передатчиком 100. Контурный ток представляет собой скорректированный измеренный регулируемый параметр процесса, который измеряется датчиком 206 (Фиг. 2). Контурный приемник 302 также предпочтительно обменивается с передатчиком 100 двусторонними цифровыми сигналами связи HART. Эти цифровые сигналы связи HART накладываются на ток 4-20 мА и находятся в полосе частот, которая не мешает распознаваемой величине тока 4-20 мА.
Плата 300 RFI также подключена к внешнему устройству 304 CAN. Как показано, внешнее устройство 304 CAN подключено к минусовой цепи через линию 307. П-фильтр 311 фильтрует выходные RFI на линии 306 CAN. Внешнее устройство 304 CAN является внешним по отношению к передатчику 100 и обменивается данными с передатчиком 100 с помощью последовательного протокола связи локальной цепи контроллеров (CAN). Внешнее устройство 304 CAN может быть промышленным устройством любого типа, которое может использоваться в соединении с передатчиком 100. Внешнее устройство 304 CAN может, например, содержать датчик температуры, для обеспечения передатчика 100 данными коррекции температуры. Внешнее устройство 304 CAN может также содержать местный контроллер, который принимает данные регулируемого параметра от передатчика 100. Внешнее устройство 304 CAN может также содержать другой передатчик, конструкция которого подобна конструкции передатчика 100. Передатчик 100 таким образом имеет первую возможность двусторонней последовательной связи на большое расстояние, используя протокол HART в цепи 301 управления процессом, и также имеет вторую возможность двусторонней связи на короткое расстояние, используя протокол CAN в местном двухпроводном соединении на линиях 305 и 307.
Плата 300 RFI подключена к внешнему устройству 304 CAN по линии 306 до контакта J1-8 на выходной плате 400 (Фиг. 1). Сигналы связи от устройства 402 CAN проходят через линию 306 и также направляются на выходную плату 400 к контакту J4A-3 на плате 500 CAN (фиг. 1).
Ток из цепи 301 обработки переносится платой 300 RFI на выходную плату 400 (Фиг. 1) с помощью контактов J1-2 и J1-3 на плате 300 RFI. Плата 300 RFI включает в себя фильтр 308 высокочастотных помех (RFI), который фильтрует выходные RFI и который подводит контурный ток из контурного приемника 302 к контактам J1-1,3. Фильтр 308 RFI создан, чтобы разрешить прохождение высокочастотной наложенной цифровой связи HART, которая находится в диапазоне низких частот. Части 310 и 312 схем питания располагаются на плате 300 RFI, чтобы обеспечивать прямое термическое соединение между частями 310, 312 и корпусом 112 для хорошего теплоотвода. Соединение 309 заземления в фильтре RFI соединено с заземлением 103 с помощью монтажного зажима WP5. Соединение 309 заземления также подключается к корпусу 112 с помощью монтажного зажима WP14.
Фиг. 4 иллюстрирует примерный вариант осуществления вспомогательной схемы 403 CAN на выходной плате 400. Вспомогательная схема 403 CAN работает вместе с электрической схемой на плате 500 CAN (описано ниже вместе с Фиг. 5А и 5В), чтобы обеспечить двустороннюю связь, поддерживающую протокол связи CAN, для осуществления связи с внешним устройством 304 CAN (Фиг. 3).
Вспомогательная схема 403 CAN включает в себя микроконтроллер 404. В предпочтительном варианте осуществления микроконтроллер 404 является 8-битовым микроконтроллером типа ATMEGA103L. Микроконтроллер 404 вдобавок к управлению вспомогательной электрической схемой 403 CAN также предпочтительно обеспечивает управление для платы 200 датчика и частей выходной платы 400, которые поддерживают 4-20 мА ток на выходе и выходы последовательной связи HART.
Вспомогательная схема 403 CAN также содержит контроллер 406 CAN. В предпочтительной компоновке контроллер 406 CAN является контроллером типа MCP2510 от Microchip Technology Inc. Чандлер, Аризона. Контроллер 406 CAN принимает CAN-форматированные сообщения по линии 408 CANRX и передает CAN-форматированные сообщения на выходе 410 TXCAN. В вентильной схеме 412 выход 410 TXCAN объединяется с вентильным выходом 414 KEYS от микроконтроллера 404. При активации выход KEYS показывает, что микроконтроллер 404 находится в процессе приема кодированной конфигурационной информации через интерфейс локального оператора (LOI). Вентильная схема 412 предотвращает передачу CAN-форматированного сообщения к линии 416 CANTXO, пока реализуется процесс конфигурирования с помощью ключей на LOI. Пример LOI описан вместе с Фиг. 4 в патенте США № 6484107 В1, Roper et al. Патент США № 6484107 В1, Roper et al введен сюда полностью. LOI является внешним по отношению к передатчику и может подключиться к дополнительному выводу 813 (Фиг. 8) для связи с микроконтроллером (таким как микроконтроллер 852 на Фиг. 9В).
Контроллер 406 CAN обменивается данными (которые не имеют CAN форматирования) с микроконтроллером 404 с помощью последовательной шины связи SPI, которая включает в себя линию 418 MOSI и линию 420 MISO. Микроконтроллер 404 также применяет сигнал CSCAN выбора микросхемы к контроллеру 406 CAN для управления обменом данными с контроллером 406 CAN. Контроллер 406 CAN передает микроконтроллеру 404 сигнал CANINT 422 прерывания, когда выполняется передача CAN.
Микроконтроллер 404 подает к контроллеру 406 CAN сигнал CANRESET сброса во время, когда питание прикладывается к передатчику 100 от двухпроводной цепи.
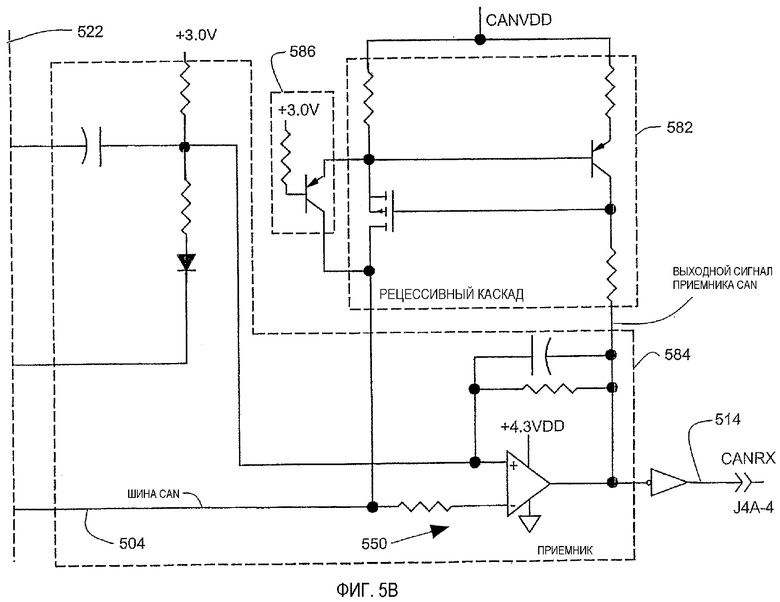
Фиг. 5А и 5В иллюстрируют примерный вариант осуществления электрической схемы на плате 500 CAN. Электрические схемы на Фиг. 5А и 5В лучше понимаются, когда Фиг. 5А и 5В соединяются вместе по пунктирным линиям 520 и 522, чтобы сформировать единую схему по Фиг. 5А и 5В. В предпочтительной компоновке электрическая схема, показанная на Фиг. 5А и 5В, содержит доминантно-рецессивную схему управления CAN такого типа, как описано в упомянутой выше заявке на патент США № 10/236874, озаглавленной «Физический уровень малой мощности для шины в промышленном передатчике», поданной 06.09.2002.
На Фиг. 5А иллюстрируется схема 580 доминантного каскада. На Фиг. 5В иллюстрируются схема рецессивного каскада 582, приемник 584 и схема 586 запуска.
На Фиг. 3 двунаправленные сигналы CAN передавались внешним устройством 304 CAN по линии 306 к контактам J1-8 на плате 300 RFI. Контакт J1-8 на плате 300 RFI соединен с контактом J1-8 на выходной плате 400, как показано на Фиг. 1. Контакт J1-8 на выходной плате 400 соединен через проводник 426 (Фиг. 4) с контактом J4-3 на выходной плате 400. Контакт J4-3 на выходной плате соединен с контактом J4A-3 на плате 500 CAN, как показано на Фиг. 5А. Внешнее устройство 304 CAN таким образом соединяется через наборы проводников и контактов с проводником 504, как показано на Фиг. 5А.
На Фиг. 5А защитный или ограничительный диоды 506 и 508 соединены с проводником 504, чтобы ограничить напряжение на проводнике 504 до пределов приблизительно +3,7 - -0,7. Эта схема ограничения ограничивает шум и нет помех для сигналов связи CAN с нормальными уровнями.
Когда вентильная схема 412 (Фиг. 4) генерирует исходящие передачи CAN на линии CANTXO, эти исходящие передачи CAN могут проводиться через разъем J4-5 (Фиг. 4) и разъем J4A-5 (Фиг. 5А) к линии 510 (CANTXO) на Фиг. 5А. На Фиг. 5А электрическая схема усиливает относительно низкий сигнал CANTXO передач CAN на линии 510, чтобы увеличить уровень мощности, который подается по линии 512 к линии 504 и к внешнему устройству 304 CAN. Когда внешнее устройство 304 CAN генерирует передачи CAN, которые прибывают к передатчику 100, то усилитель 550 на Фиг. 5В принимает прибывшие передачи CAN на линии 504 и усиливает сигналы, обеспечивая сигнал CANRX на линии 514. Сигнал CANRX пропускается разъемом J4A-4 (Фиг. 5В) к разъему J4-4 (Фиг. 4) к линии 408 (Фиг. 4) и обеспечивает сигнал CANRX контроллеру 406 CAN.
На Фиг. 5А сигнал CANTXO подается к входу инвертора 532. Конструкция инвертора 532 подразумевает, что передний и задний края четко определены и что сигнал на выходе инвертора 532 имеет низкое сопротивление. Выход инвертора 532 подключен к схеме 580 доминантного каскада, который включает в себя MOSFET 538.
Фиг. 6 иллюстрирует пример гальванически изолированной последовательной двунаправленной схемы связи, адаптированной для использования в схемах, показанных на Фиг. 2. Схема 600 включает в себя трансформатор 602, который включает в себя первую обмотку 604, которая гальванически изолируется от второй обмотки 606 изоляционными материалами трансформатора. Изоляционный материал формирует часть гальванического барьера 204, который гальванически изолирует изолированную электрическую схему 201 нижнего уровня (Фиг. 2) от электрической схемы с контурами высокого уровня, которая управляет линиями приемопередачи HART и CAN (Фиг. 1). Сигнал, подаваемый через гальванический барьер 204, является скорее магнитным, чем электрическим, чтобы обеспечить электрическую развязку.
Микроконтроллер 220 (Фиг. 2 и 6) подключен к усилителю 610, который управляет обмоткой 604 с последовательным сигналом связи для передачи выходных данных и команд с платы датчика. Соответствующий последовательный сигнал связи, магнитно индуцированный в обмотке 606, подает данные и команды от платы датчика через формирующую схему 612 к выходной плате. Выходная плата подключается к усилителю 620, который управляет обмоткой 606 с последовательным сигналом связи для передачи выходных данных и команд с выходной платы. Соответствующий последовательный сигнал связи, магнитно индуцируемый в обмотке 604, подает данные и команды от выходной платы через формирующую схему 622 к плате датчика. Таким образом связь является двусторонней (двунаправленной), проходящей через схему 600.
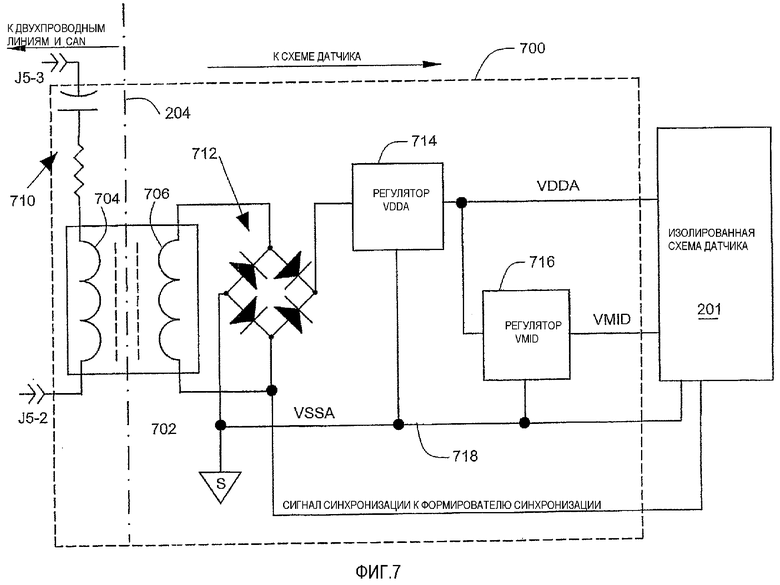
Фиг. 7 иллюстрирует пример гальванически изолированной схемы 700 питания, адаптированной для использования в схемах, показанных на Фиг. 2. Схема 700 включает в себя трансформатор 702, который включает в себя первую или первичную обмотку 704, которая гальванически изолирована от вторичной обмотки 706 изоляционными материалами трансформатора. Изоляционный материал формирует часть гальванического барьера 204, который гальванически изолирует изолированную электрическую схему 201 нижнего уровня (Фиг. 2) от электрической схемы с контурами высокого уровня, которая управляет двусторонними линиями HART и CAN (Фиг. 1). Энергия, передаваемая через гальванический барьер 204, является магнитной, нежели электрической, чтобы обеспечить электрическую развязку.
Трансформатор 702 принимает ток питания на контактах J5-3 и J5-2. Резистивно-емкостная цепь 710 подключена последовательно с первичной обмоткой 704 для лучшего согласования трансформатора для его управления по контактам J5-3 и J5-2. Вторичная обмотка 706 подключается к мостовому выпрямителю 712. Мостовой выпрямитель 712 выпрямляет выходной сигнал вторичной обмотки 706 и применяет выпрямленный выходной сигнал к первой цепи 714 регулятора, которая генерирует первое напряжение питания нижнего уровня VDDA. VDDA должно быть меньше, чем 5,5 В, чтобы обеспечить низкое энергопотребление. VDDA подключена ко второму регулятору 716, который генерирует второе напряжение питания низкого уровня VMID. VMID предпочтительно должно быть меньше, чем 2,3 В. Общий проводник на плате 718 датчика подключен к мостовому выпрямителю 712, регуляторам 714 и 716 и к изолированной электрической схеме 201.
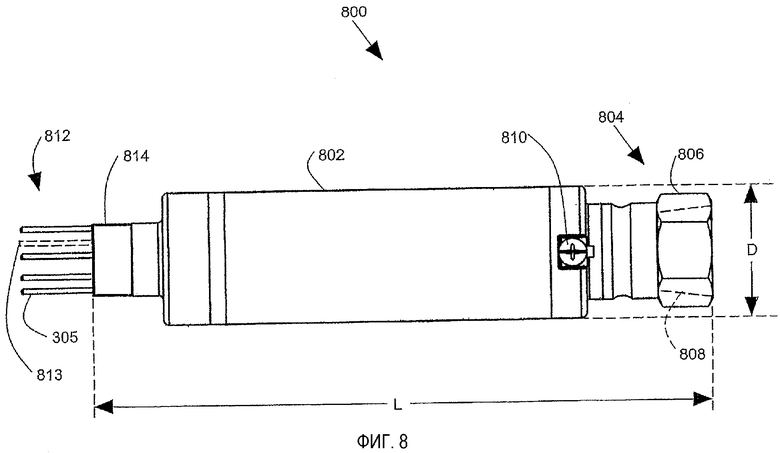
Фиг. 8 наглядно иллюстрирует передатчик 800 с регулируемым параметром. Передатчик 800 включает в себя в основном цилиндрическое основное тело 802 корпуса. На первом конце основного тела 802 корпуса патрубок 804 среды включает в себя внешнюю шестигранную поверхность 806 для захвата гаечным ключом и внутреннее отверстие 808 с резьбой для навинчивания на технологическую трубу (не показано), которая доставляет жидкость передатчику 800. Винт 810 заземления обеспечивается на основном теле 802 для необязательного подключения провода заземления между основным телом и винтом заземления.
На втором конце передатчика 800 имеется четыре тонкопроволочных вывода 812, появляющихся из герметичного электрического проходного разъема 814. Тонкопроволочные выводы 812 включают в себя выводы LOOP+, LOOP-, CAN и GROUND. Тонкопроволочные выводы могут быть удобно и экономично соединены с внешней проводкой с помощью соединения скруткой, по резьбе и обжимом соединяемых элементов.
Платы электрических схем внутри корпуса 802 закрываются от окружающей атмосферы. Корпус 802 используется как электростатический щит для схем низкого уровня внутри корпуса 802. В предпочтительном варианте осуществления корпус 802 имеет длину L, которая меньше 19 см (7,5 дюймов), а в диаметре D - меньше 5 см (2 дюйма).
Проблема шумовой связи в компактно упакованном передатчике с двусторонним выходом CAN решена, и может быть использован компактный корпус передатчика.
Фиг. 9А-9В, взятые вместе, иллюстрируют упрощенную схему варианта осуществления передатчика 820 с регулируемым параметром, которая выделяет основные особенности многоуровневой подачи питания в передатчике 820. Фиг. 9А-9В будут лучше понятны, когда они будут совмещены вместе по пунктирной линии 822 для формирования единой схемы компоновки элементов для многоуровневой подачи питания.
Передатчик 820 запитывается с помощью подключенных выводов WP1 WP2 передатчика к двум проводам токовой цепи 824 от четырех до двадцати миллиампер на левой стороне Фиг. 9А. Токовая цепь (контур) 824 содержит источник 826 питания DC (постоянного тока), соединенный последовательно с сопротивлением 828 нагрузки. Передатчик 820 работает как контроллер тока, который регулирует контурный ток ILOOP в токовой цепи 824 до уровня тока, представляющего регулируемый параметр 825, измеренный передатчиком 820 регулируемого параметра. В предпочтительном варианте осуществления токовая цепь 824 также переносит двунаправленные сигналы связи HART, которые накладываются на контурный ток ILOOP.
Величина подачи питания, которое доступно из токовой цепи 824 для запитки передатчика 820, сильно ограничена, а наиболее сильно ограничена, когда контурный ток ILOOP находится на нижнем пределе в четыре миллиампера. На нижнем пределе общее значение тока, протекающего через передатчик, равняется 4,000 мА и не может быть увеличено (для того, чтобы обеспечить необходимой подачей энергии передатчик), поскольку уровень тока используется как представление регулируемого параметра 825.
В одном варианте осуществления токовая цепь 824 может быть основана на обеспечении минимального напряжения на выводах WP1, WP2, но не более чем 12 В при худших условиях. Однако напряжение, поддерживаемое токовой цепью 824 на выводах WP1, WP2, является нерегулируемым и может достигнуть уровня примерно до 42,4 В в зависимости от переменных факторов, таких как регулирование источника питания 826, сопротивления контурной проводки и уровня тока 4-20 мА.
Электронная электрическая схема в передатчике 820 требует напряжение источника питания, которое регулируется для безотказной работы. Соответственно, передатчик 820 включает в себя первый регулятор 830 напряжения. Для того чтобы максимизировать энергию, доступную для электронной электрической схемы в передатчике 820, первый регулятор 830 напряжения настраивается, чтобы обеспечить наиболее возможно (регулируемый) выходной сигнал 840, который может быть надежно сгенерирован из минимального неотрегулированного напряжения, примененного к выводам WP1, WP2. Принимая во внимание перепады напряжения, которые вносятся дросселями 832, 834 RFI, защитным диодом 836 обратной полярности и токочувствительным резистором 838, наиболее возможное отрегулированное напряжение в первом варианте осуществления равняется, примерно, 9,5 В по отношению к точке 831 сложения тока, также называемой RETURN 831.
В этом варианте осуществления из 4 мА тока, доступного из токовой цепи 824, только примерно 3,1 мА тока доступно на первом выводе 840 напряжения первого регулятора 830 напряжения. Оставшиеся 0,9 мА тока сохраняются для поддержания достаточного тока, протекающего через составной транзистор 842 с объединенными коллекторами, для гарантии того, что контурный ток ILOOP может быть промодулирован передатчиком 820, чтобы выработать сигнал HART +/-0,5 мА на слабом токе в 3,6 мА, обычно свойственном низкоуровневой сигнализации. Стандарт, установленный NAMUR (Normenarbeitsgemeinshaft fur Mess- und Regeltechnik der chemischen Industrie), требует, чтобы ток цепи на 4-20 мА уменьшился до 3,6 мА или ниже, чтобы отобразить состояние сигнализации передатчика. Когда передатчик находится в этом состоянии сигнализации, модуляция HART может использовать ток ниже на дополнительные 0,5 мА. Источники питания передатчика должны быть установлены только на 3,1 мА тока в наихудшем случае. Разнообразные функции источника питания передатчика необходимы для уменьшения тока, чтобы он составлял менее чем 3,1 мА, и затем передатчик 820 выравнивает ток I1 (протекающий через составной транзистор 842 с объединенными коллекторами) так, чтобы контурный ток находился в пределах 4-20 мА, что показывает уровень регулируемого параметра, и также на уровне 3,6 мА, что показывает состояние сигнализации.
В одном варианте осуществления доступная общая мощность на первом выходе 840 напряжения равняется приблизительно Р=VI=(9,5 В)(3,1 мА)=29,45 мВт. Эта доступная общая мощность является достаточной, выражена в количестве милливатт, чтобы запитать нагрузку 844 контура локальной сети контроллеров (CAN) наряду с другими нагрузками передатчика, такими как нагрузка 846 аналогового контура, нагрузка 848 контура управления трансформатором, нагрузка 850 modac и нагрузка 852 контура цифровой обработки микрокомпьютера.
MODAC 850 представляет собой схему, которая сочетает функции MODEM и DAC. MODEM распознает модуляцию HART в измеренном напряжении в точке 831. MODEM также передает модуляцию HART составному транзистору 842 с объединенными коллекторами через усилитель 811 (Фиг. 9А). DAC преобразует цифровое представление регулируемого параметра (обеспеченное схемой 852 микроконтроллера (uC)) в аналоговый ток для использования для ввода в контроллер 843 контурного тока.
Однако найдено, что характеристики напряжения и тока (нагрузочная характеристика) нагрузок контура передатчика плохо соответствуют характеристике напряжения и тока (характеристика подачи питания) первого регулятора 830 напряжения. Нагрузки контура передатчика требуют вспомогательных токов, которые добавляют до примерно 4,1 мА, значительно превышая 3,1 мА, доступных из первого регулятора 830 напряжения. Нагрузка 844 электрической схемы CAN, в частности, требует около 0,6 мА при наихудших условиях, когда внешнее устройство CAN потребляет 0,5 мА. Специалисту будет понятно, что конкретные уровни тока, описанные в этих применениях, являются только примерными и что другие уровни тока могут быть использованы при различиях в конструкции в объеме стандарта 4-20 мА, стандарта 3,6 мА NAMUR и стандарта модуляции HART +/- 0,5 мА. Предел вспомогательного тока устанавливается так, чтобы не нарушить функционирование токового контура в пределах этих стандартов.
Нагрузки (844, 846, 848 и 850) контура передатчика также требуют регулируемых вспомогательных напряжений, обычно находящихся в пределах около 5,2-3,0 В, что много меньше, чем обычные 9,5 В, обеспеченные первым регулятором 830 напряжения.
Таким образом, существует полное несовпадение между характеристиками напряжения и тока токовой цепи 824 и характеристиками напряжения и тока нагрузок 844, 846, 848 и 850 контура передатчика. Характеристики токовой цепи 824 фиксируются многолетними индустриальными стандартами, которые основаны на физике конструктивно безопасных электрических схем и, как показывает практика, не могут быть значительно изменены. Характеристики нагрузок 844, 846, 848 и 850 фиксируются доступными интегральными схемами нижнего уровня и не существует, таким образом, практической возможности для изменения характеристик нагрузок. Эта проблема усугубляется тем, что контурный ток ILOOP должен быть измерен и обеспечен отклик (обратная связь), чтобы обеспечить точное соответствие контурного тока регулируемому параметру 825, который измеряется передатчиком. Чтобы обеспечить отклик токочувствительный резистор 838 обеспечивается для принятия тока I1 (протекающего через составной транзистор 842 с объединенными коллекторами), тока I2 (используемого для питания первого регулятора 830 напряжения) и тока I3 (используемого для питания второго регулятора 854). Контроллер 843 контурного тока управляет током I1 на основе отклика так, что контурный ток ILOOP находится на надлежащем уровне для отображения регулируемого параметра 825.
Положительный вывод WP1 и отрицательный вывод WP2 переносят контурный ток ILOOP в передатчик 820 и из передатчика 820. Внутри передатчика 820 контурный ток ILOOP делится на несколько компонент тока, которые включают в себя первый ток I1, второй ток I2, третий ток I3 и четвертый ток I4. В основном, ILOOP=I1+I2+I3+I4, за исключением небольших постоянных токов смещения, которые могут протекать, но которые не вносят ошибку в контурный ток, поскольку их эффективно удаляет калибровка.
Передатчик 820 включает в себя контроллер 843 контурного тока. Контроллер 843 контурного тока включает в себя токочувствительный резистор 838. По резистору 838 протекает первый ток I1, второй ток I2 и третий ток I3. Резистор 838 разработан для снятия напряжения в точке 831, которое возвращается по линии 845 обратной связи ко входу контроллера 843 контурного тока. Контроллер 843 контурного тока управляет первым током I1, как функцией регулируемого параметра 825 (вход обеспечивается с помощью MODAC 850) и измеренного напряжения в точке 831. Резистор 838 измерения тока, однако, не переносит ток I4. Ток I4 обходит резистор измерения тока и возвращается непосредственно к отрицательному выводу WP2.
Передатчик 820 включает в себя первый регулятор 830 напряжения, который подключен к положительному выводу WP1 для подачи питания. Первый регулятор 830 напряжения обеспечивает первый выходной сигнал 840 напряжения. Первый регулятор 830 напряжения питается током I2. Ток I2 проходит через первый регулятор 830 напряжения и возвращается к отрицательному выводу WP2, проходя через резистор 838 измерения тока.
Передатчик 820 включает в себя второй регулятор 854 напряжения, который подключен к первому выводу 840 напряжения для подачи питания. Второй регулятор 854 напряжения обеспечивает второй выход 856 напряжения. Второй регулятор 854 напряжения питается третьим током I3. Третий ток I3 протекает по линии 855 от второго регулятора 854 к резистору 838 измерения тока.
Передатчик 820 включает в себя первую нагрузку 848 (нагрузка 848 контура управления трансформатором, которая управляет трансформатором, таким как показано на Фиг. 7), которая потребляет первый ток 849 нагрузки, который протекает между первым выходом 840 напряжения и вторым выходом 856 напряжения.
Передатчик включает в себя вторую нагрузку, которая включает в себя нагрузку 844 локальной сети контроллеров, а также нагрузки 846, 850 и 852. Вторая нагрузка также включает в себя несколько небольших постоянных токов смещения, которые возвращаются к общему проводу. Вторая нагрузка потребляет второй ток 858 нагрузки, который протекает между вторым выходом 856 напряжения и выводом COMMON, который подключен к отрицательному выводу WP2 через дроссель 834. Второй ток 858 нагрузки обходит резистор 838 измерения тока.
Второй регулятор 854 обеспечивает только часть второго тока 858 нагрузки (I4). Первый ток 849 нагрузки, после протекания через первую нагрузку 848, также протекает через вторую нагрузку. Ток, используемый первой 848 нагрузкой, эффективно повторно используется второй нагрузкой, поскольку первая и вторая нагрузки размещаются последовательно или, другими словами, последовательно включенные. Это повторное использование первого тока нагрузки уменьшает величину тока, который необходимо обеспечить второму регулятору. Резистор 860 тока нагрузки обеспечивает второй ток нагрузки. Второй регулятор регулирует напряжение в точке 862 для фиксации напряжения предпочтительно на уровне 4,3 В. Второе напряжение 856 таким образом включает в себя две компоненты напряжения. Второе напряжение 856 включает в себя отрегулированную компоненту, которая обычно равняется 4,3 В. Второе напряжение 856 также включает в себя компоненту регулируемого напряжения, которое изменяется в зависимости от падения напряжения на резисторе 860. Падение напряжения на резисторе 860 таким образом включает в себя компоненту, которая пропорциональна второму току 858 нагрузки.
Контроллер 843 контурного тока принимает второе напряжение 856 на линии 857. Контроллер 843 контурного тока воспринимает второе напряжение 856 для коррекции первого тока I1 для второго тока 858 нагрузки, который обходит резистор 838 измерения тока. Контроллер 843 контурного тока таким образом управляет током I1, как функцией регулируемого параметра, контурным током, принятым резистором 838, и так же, как функция второго тока нагрузки, даже несмотря на то, что второй ток нагрузки не протекает через резистор 838. Многоуровневое размещение первой и второй нагрузок позволяет напряжениям нагрузок быть сложенными для лучшего согласования доступного регулируемого напряжения. Многоуровневое размещение первой и второй нагрузок позволяет части доступного регулируемого тока протекать через первую и вторую нагрузки, эффективно повторно используя ток и позволяет общему току нагрузки превышать доступный отрегулированный ток из контура. Передатчик 820 таким образом способен поддержать нагрузку локальной сети контроллеров (CAN) вместе с другими нагрузками передатчика без превышения ограничений по току и напряжению токового контура 824.
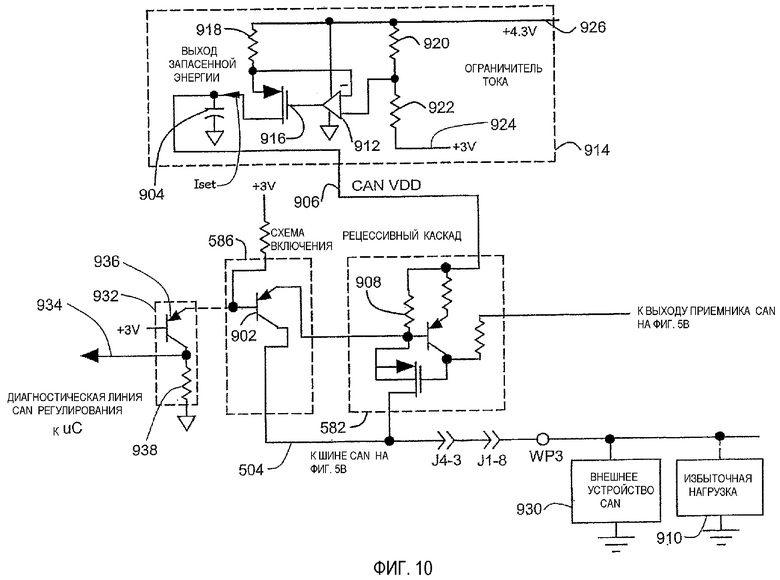
Фиг. 10 иллюстрирует ограничитель 914 тока CAN, который ограничивает величину тока, которую рецессивный каскад 582 (также показанный на Фиг. 5А) может подавать на шину 504 CAN (также показанной на Фиг. 5А). Ссылочные позиции и терминология, использованная на Фиг. 10, представляют собой такие же ссылочные позиции и терминологию, используемую на Фиг. 5В, идентифицируют одинаковые или подобные параметры.
Энергия DC обеспечивается на внешние устройства CAN (такие, как LCD) через шину 504 CAN всякий раз, когда шина 504 CAN находится в рецессивном состоянии (высокий уровень, обычно +3 В). В течение доминантного состояния (низкий уровень, обычно +1 В), конденсатор 904 большой емкости заряжается и затем надлежащая зарядка становится доступной при большом импульсе тока для шины 504 CAN, как только шина 504 CAN возвращается в рецессивное состояние.
Мощность физического уровня CAN обеспечивается через ограничитель 914 тока, который предназначен для ограничения тока, который потребляет рецессивный каскад 582 от вспомогательного проводника 906 (CAN VDD) до фиксированного предела. В одном предпочтительном варианте осуществления фиксированный передел равняется 500 мкА. Этот ограничитель 914 тока гарантирует, что перегруженная или закороченная шина 504 CAN не вынудит передатчика выйти из его намеченного диапазона токов 4-20 мА токовой цепи (такой, как токовая цепь 824 на Фиг. 10). Ограничитель 914 тока ограничивает постоянный ток, доступный для шины 504 CAN, чтобы предотвратить перегрузку или закорачивание на шине 504 CAN из-за создания различного уровня ошибок на 4-20 мА токовой цепи передатчика. Конденсатор 904 большой емкости хранит заряд, когда шина 504 CAN имеет низкий уровень. Когда шина 504 CAN имеет высокий уровень, заряд передается внешнему устройству 930 CAN, которое подпитывается посредством шины 504 CAN.
Ограничитель 914 тока содержит операционный усилитель 912. Операционный усилитель 912 представляет собой компоненту ввода/вывода (I/O) сигнала с равной напряжению питания амплитудой, которая управляет полевым транзистором (FET) 916, чтобы установить предел тока. Ограничитель 914 тока содержит резистор 918, который контролирует ток, протекающий от шины 926 +4,3 В к линии 906 CAN VDD. Ограничитель 914 тока содержит резисторы 920 и 922, которые формируют делитель напряжения, который устанавливает предел тока, предназначенный для усилителя 912. Ограничитель 914 тока располагается между линией 924 (+3 В) и линией 926 (+4,3 В), чтобы гарантировать правильную последовательность запуска передатчика, как будет подробнее описано ниже со ссылкой на Фиг. 13.
Чтобы эффективно обеспечить мощностью второстепенную нагрузку на шине 504 CAN, физический уровень сохраняет заряд, пока шина 504 CAN находится на нижнем уровне и передает заряд на шину 504 CAN, когда шина 504 CAN переключается обратно на верхний уровень. Конденсатор 904 большой емкости осуществляет указанное выше.
Поскольку конденсатор 904 заряжается через FET 916, который ограничивает ток, напряжение на конденсаторе 904 уменьшается моментально, когда шина 504 CAN забирает пиковый ток из него. В одном варианте осуществления конденсатор 904 является достаточно большим в значении, чтобы поддержать 3,0 В рабочего напряжения в течение связи. Это гарантирует, что внешнее устройство CAN, такое как LCD, имеет достаточное вспомогательное напряжение для работы. Заряд конденсатора 904 пополняется между пакетами связи.
Чтобы запуститься должным образом, когда мощность сначала применяется к (или) восстанавливается из закороченной шины 504 CAN, схема 586 запуска обеспечивает альтернативный путь, который поставляет ток для шины 504 CAN. Для удовлетворения этого требования транзистор 902 p-n-p на схеме 586 запуска включается, чтобы обеспечить мощностью шину 504 CAN, после того как конденсатор 904 большой емкости полностью зарядится. Схема 586 запуска используется шиной CAN при запуске или при неисправностях, после того как шина была закорочена на землю. Схема 586 запуска обеспечивает правильное включение питания и эффективное использование энергии, позволяя конденсатору 904 большой емкости полностью зарядиться до обеспечения любым током шины 504 CAN. Физический уровень CAN выключает рецессивный каскад 582, когда шина 504 CAN находится на нижнем уровне, чтобы сохранить ток. Это формулирует задачу при запуске или после того, как шина была закорочена на землю. Поскольку шина находится на нижнем уровне в любом из этих случаев, то рецессивный каскад 582 будет выключен. Ничто не будет поднимать уровень шины до высокого для запуска или восстановления из закороченного состояния. Биполярный транзистор 902 p-n-p обеспечивает путь повышения напряжения для выполнения этой функции. Эмиттер транзистора 902 подключается к линии 906 (CAN VDD) через резистор 908, база транзистора 902 подключается к +3 В (либо непосредственно, как показано, либо через резистор), а коллектор транзистора 902 подключается к шине 504 CAN. В этом варианте осуществления, как только линия 906 достигла примерно 3,6 В, транзистор 902 будет включаться и ток потечет к шине 504 CAN. Это создает 3,6 В на шине 906, которые являются достаточными для требований физического уровня. Как только шина 906 находится на уровне 3,6 В, конденсатор 904 полностью заряжается так, чтобы негде было хранить дополнительный заряд. Это допустимо для тока питания для шины 504 CAN, как механизм повышения напряжения.
Если шина 504 CAN нагрузилась избыточной нагрузкой 910, то ток будет течь к заземлению, а линия 906 будет зафиксирована на 3,6 В. Если не существует нагрузки DC на шине, то ток будет течь через соединение база/эмиттер транзистора 902 и в шине +3,0 В, чтобы быть повторно использованным. Дополнительное преимущество заключается в том, что физический уровень потребляет фиксированный ток в течение всего времени, так что схема ограничения DC питания не является динамическим применением и поэтому сохраняются переключаемые нагрузки, ассоциированные с последовательной шиной, изолированной от внутренней шины +4,3 В и от электрической схемы обратной связи. Это позволяет использовать относительно медленный маломощный операционный усилитель 912.
Дополнительная схема 932 диагностики может быть добавлена к схеме, показанной на Фиг. 10. Схема 932 диагностики подключена к электрической схеме подачи питания CAN и обеспечивает диагностический выходной сигнал 934, который показывает состояние регулируемой мощности, подаваемой на шину CAN на линии 504. Если существует избыточная нагрузка 910 (такая, как избыточная емкость кабеля), диагностический выходной сигнал 934 может оповещать оператора о проблеме. Нагрузка является избыточной, когда она превышает предельный ток Iset 0,5 мА, который установлен ограничителем 914 тока. Диагностический выходной сигнал 934 предпочтительно подается на микроконтроллер, который представляет собой часть цифровых схем 852 uC на Фиг. 9В.
В предпочтительном варианте осуществления диагностический выходной сигнал 932 содержит транзистор 936 p-n-p, эмиттер которого соединен с базой транзистора 902, база подключена к +3 В и коллектор подключен к резистору 938, который подключен к общему DC. Диагностический выход 934 подключен к месту соединения резистора 938 и коллектора транзистора 936.
Фиг. 11 иллюстрирует электрическую схему источника питания, который легко настраивается для использования в передатчиках, таких как показаны на Фиг. 9А-9В, 10. Ссылочные позиции, используемые на Фиг. 11, которые представляют собой такие же ссылочные позиции, используемые на Фиг. 9А-9В и 10, относятся к одинаковым или подобным параметрам.
Внешнее устройство 930 CAN имеет определенные особенности, которые могут быть запрограммированы или сконфигурированы при запуске и которые могут быть повторно сконфигурированы время от времени в течение использования. Данные конфигурации CAN переносятся к внешнему устройству 930 CAN по шине 504 CAN для конфигурирования внешнего устройства 930 CAN.
Данные конфигурации CAN передаются по двухпроводной цепи 4-20 мА, которая питает передатчик с помощью протокола HART. Modac 850 принимает сообщения HART, которые включают в себя данные конфигурации CAN, демодулирует сообщения HART и предоставляет данные конфигурации CAN микроконтроллеру 950. Микроконтроллер 950 передает данные конфигурации CAN к схеме 952 EEPROM, в которой они долговременно сохраняются как сохраненные данные 954 конфигурации CAN. Как только внешнее устройство 930 CAN конфигурируется, то затем другое устройство HART (в основном система управления процессом), подключенное к двухпроводной цепи 4-20 мА, может обмениваться данными с внешним устройством 930 CAN.
Каждый раз, когда шина 504 CAN повторно запускается, микроконтроллер 950 автоматически извлекает текущую версию данных конфигурации CAN из схемы 952 EEPROM и затем использует схему 956 CAN для передачи текущей версии данных конфигурации CAN внешнему устройству 930 CAN.
Время от времени может возникнуть мгновенная потеря мощности («brown-outs») «частичное затемнение» на двухпроводной цепи 4-20 мА, которая питает передатчик. Если случается один из этих «brown-outs», когда микроконтроллер 950 записывает данные конфигурации CAN в EEPROM 952, то запись данных может быть не завершена, а сохраненные данные 954 конфигурации CAN могут быть искаженными или устаревшими. После этого происшествия система управления процессом может затем попробовать осуществить связь со внешним устройством 930 CAN, предполагая, что внешнее устройство 930 CAN в настоящий момент сконфигурировано, когда фактически внешнее устройство 930 имеет искаженную или устаревшую конфигурацию. Неправильное срабатывание системы управления может быть результатом этого несоответствия предположительных и действительных данных конфигурации CAN. Чтобы уменьшить возможность такого несоответствия, электрическая схема, описанная ниже, предназначается для предотвращения такого несоответствия.
Шина источника питания +3 В обеспечивается конденсатором 958 сохранения мощности, который медленно уменьшает напряжение питания +3 В и поддерживает достаточно долго питание +3 В для полного выполнения записи данных конфигурации CAN в EEPROM 952, после того как прекращается подача питания. Первое отрегулированное напряжение 840 (+9,5 В) обеспечивается только маленьким запасанием энергии, так что питание + 9,5 В быстро уменьшается, когда контурная подача энергии прекращается.
Питание +9,5 В контролируется резистивным делителем напряжения, который включает в себя резисторы 960 и 962. Компаратор 964 имеет первый вход, подключенный к выходу 966 резистивного делителя напряжения, и имеет второй вход, на который подано фиксированное опорное напряжение 968. Компаратор 964 сравнивает выход 966 резистивного делителя напряжения с фиксированным опорным напряжением. Выход 970 компаратора показывает, что контурная подача питания прервана. Выход 970 компаратора подключен к FET 972, который обеспечивает выход 974 «brown-out» для микроконтроллера 950, который включается, когда контурная подача питания прервана.
Когда выход 974 «brown-out» включается, микроконтроллер 950 отвечает двумя действиями. В первом действии микроконтроллер 950 устанавливает флаг аварийной сигнализации с помощью осуществления связи HART для системы управления процессом. Флаг остается установленным и далее существует обмен данными HART, флаг включается в обмен данными, оповещая оператора, что существует состояние «brown-out». Аварийная сигнализация предупреждает систему управления процессом о возможности того, что данные конфигурации CAN могут быть искажены из-за «brown-out». Когда восстанавливается питание, система управления процессом отвечает повторной передачей данных конфигурации CAN. Во втором действии микроконтроллер 950 отвечает задержкой других задач микроконтроллера и быстро заканчивает запись сохраняемых данных 954 конфигурации CAN, пока питание +3 В все еще доступно из-за накопления энергии в конденсаторе 958. Эти два действия гарантируют, что конфигурация внешних устройств CAN не является устаревшей или искаженной из-за «brown-out».
Фиг. 12 иллюстрирует электрическую схему источника питания, которая пригодна для использования в передатчиках, таких как показаны на Фиг. 9А-9В, 10 и 11. Ссылочные позиции, используемые на Фиг. 12, которые представляют собой такие же ссылочные позиции, как используемые на Фиг. 9А-9В, 10 и 11, относятся к одинаковым или подобным элементам.
Цифровая электрическая схема и электрическая схема микроконтроллера (такие, как цифровая электрическая схема и электрическая схема микроконтроллера 852, показанная на Фиг. 9В) в передатчике потребляют токи из источника питания +3 В, которые включают в себя относительно большие импульсные пики тока. Эти относительно большие импульсные пики тока могут вызывать неустойчивость на выходе схемы 1000 регулятора напряжения +3 В. Импульсное искажение от одной схемы может действовать как входной шум для других схем, подключенных к питанию +3 В. В частности, микрокомпьютер 950, EEPROM 952 и переключатели 1002 и 1004, основанные на эффекте Холла, имеют тенденцию генерировать шумовые выбросы.
Регулятор 1000 +3 В обеспечивает выход регулятора, который подключен через резистор 1006 к шине +3 В. Резистор 1006 имеет сопротивление 10 Ом. Шина +3 В шунтируется конденсатором 1008 накопления энергии. Конденсатор 1008 накопления энергии обычно имеет емкость примерно 22 микрофарады. Компоновка резистора 1006 и конденсатора 1008 формирует низкочастотной RC фильтр, который имеет тенденцию к расстройке или разъединению регулятора 1000 от его нагрузки на шине +3 В. Компоновка с RC фильтром имеет тенденцию к улучшению стабильности выхода регулятора.
Шина +3 В подключена к микроконтроллеру с помощью низкочастотного RC фильтра, который содержит резистор 1010 и конденсатор 1012. Резистор 1010 обычно имеет сопротивление 150 Ом, а конденсатор имеет емкость, обычно 1 микрофараду. Эта компоновка имеет тенденцию к изолированию шины +3 В от шумовых выбросов, генерируемых микроконтроллером 950, и, наоборот.
Шина +3 В подключена к EEPROM 952 с помощью низкочастотного RC фильтра, который содержит резисторы 1014, 1016 и конденсатор 1018. Резистор 1014 обычно имеет сопротивление 270 Ом, а конденсатор 1018 обычно имеет емкость 47 микрофарад. Резистор 1016 обычно имеет сопротивление 47 Ом и ограничивает ток для конденсатора 1018. Эта компоновка имеет тенденцию к изолированию шины +3В от шумовых выбросов, генерируемых EEPROM 952, и, наоборот.
Шина +3 В выборочно подключена к переключателям 1002 и 1004 с эффектом Холла с помощью FET 1020. Микроконтроллер 950 инициирует выход SWSTART на линии 1022, чтобы включить FET 1020 и подключить шину +3В к линии 1024. RC цепочки 1026 и 1028 подключают подачу питания на линии 1024 к переключателям 1002 и 1004 с эффектом Холла. Переключатели 1002 и 1004 с эффектом Холла могут быть активированы карманным магнитом, чтобы вручную установить временной интервал и обнуление для контурного тока. Переключатели 1002 и 1004 с эффектом Холла имеют тенденцию к уменьшению больших токовых выбросов из шины питания при активации.
Фиг. 13 иллюстрирует упрощенную временную диаграмму подачи питания на электрическую схему передатчика, такую как электрическая схема, показанная на Фиг. 9А, 9В, 11 и 12. На Фиг. 13 горизонтальная ось представляет собой время, а вертикальные оси представляют, имеется ли полная подача энергии для каждого из представленных сигналов. «Высокий» уровень показывает, что сигнал достиг полного уровня подачи питания, а «низкий» уровень показывает меньшую, чем полная, подачу энергии.
Временная диаграмма показывает последовательность полной подачи питания шинами питания в передатчике так, чтобы распределение энергии в течение включения и выключения смещалось вперед, побуждая микроконтроллер раньше включаться, и также смещалось вперед при отключении микроконтроллера в течение выключения. Микроконтроллер включает в себя последовательность программного обеспечения «начального запуска», которая дольше, чем последовательность запуска для других электрических схем в передатчике.
Важно запустить контроллер микроконтроллера и управлять MODAC, прежде чем источник питания 4,3 В установится в свое полное значение. Это распределение позволяет избегать контроллеру, имеющему контурный ток, потреблять начальный выброс тока перегрузки, который может быть неправильно истолкован внешней цепью управления, а именно как сигнал сигнализации.
Также важно для микроконтроллера выполнить сохранение данных конфигурации CAN, когда существует «brown-out» или отключается подача питания. Как объяснялось ранее со ссылкой на Фиг. 11, ослабевание сигналов первого выхода (+9,5В) микроконтроллера для выполнения сохранения данных конфигурации CAN и большая емкость конденсатора 958 позволяет микроконтроллеру 950 работать достаточно долго, чтобы завершить сохранение прежде, чем напряжение шины +3 В уменьшится так, что микроконтроллер больше не сможет работать.
Последовательность иллюстрируется для управляющей цепи процесса, которая первоначально выключена, затем осуществляется полная подача питания на 1052 и затем подача питания уменьшается на 1054. Переходной участок на 1054 является примером «brown-out» или разрыва контурной подачи энергии.
Когда цепь сначала подпитывается на 1052, регулятор, который обеспечивает подачей энергии микроконтроллер (например, регулятор 1000 на Фиг. 12 или регулятор +3 В на Фиг. 9В), заряжает относительно большие емкости конденсаторов (например, конденсаторы 1008, 1012 и 1018 на Фиг. 12) так, чтобы входное питание для регулятора (например, шина +4,3 В на Фиг. 9В и 12) интенсивно загружалось. Выходной сигнал регулятора +3 В переходит в регулирование в 1056 на Фиг. 13. Далее, в последовательности питание +4,3 В подается на схемы CAN и аналоговые схемы на 1058 и 1060. Наконец, первое регулируемое напряжение (+9,5 В) переходит в регулирование на 1062.
Когда полная энергия для цепи теряется на 1054, питание шины +9 В быстро уменьшается и микроконтроллер принимает флаг «brownout» на 1064, сигнализирующий микроконтроллеру завершить происходящее сохранение конфигурации CAN. Электрическая схема, показанная на Фиг. 11, иллюстрирует генерирование такого флага «brownout». Далее в последовательности напряжение шины 4,3 В падает, а электрическая схема CAN и аналоговая электрическая схема перестают получать энергию на 1066 и 1068. Наконец, микроконтроллер перестает получать энергию последним на 1070.
Хотя настоящее изобретение описано со ссылкой на предпочтительные варианты осуществления, специалисту будет понятно, что изменения могут быть сделаны по форме и деталям без выхода из объема изобретения.









Использование: для измерения и передачи регулируемых параметров. Технический результат заключается в повышении качества и помехозащищенности передачи. Передатчик регулируемого параметра (100), который предпочтительно включает в себя выходную схему (400, 300), которая обеспечивает двунаправленные линии связи HART и локальной сети контроллеров (LOOP+, LOOP-, CAN, GROUND). Выходная схема передатчика включает в себя контакты подключения схемы датчиков (202). Изолированная схема (201) подключена к контактам подключения схемы датчиков. Изолированная схема включает в себя схему датчика, измеряющего переменную процесса. Изолированная схема далее содержит гальванически изолирующий барьер (204), который гальванически изолирует электрическую схему датчика от двунаправленных линий связи HART и локальной сети контроллеров. Многоуровневая подача питания (Фиг.9А, 9В) обеспечивает управление питанием. Другие объекты могут включать в себя диагностический выход (934) ограничителя тока локальной сети контроллеров, временную последовательность включения и выключения микроконтроллера, интерфейс местного оператора и управление питанием. 5 н. и 22 з.п. ф-лы, 15 ил.
| DE 19622295 A, 21.03.2002 | |||
| ТРЕХПРОВОДНОЙ ПЕРЕДАТЧИК | 1992 |
|
RU2111543C1 |
| RU 98108150 A, 10.02.2000 | |||
| Способ получения производных 6-гидразино-пиридо-(2,1- @ )-хиназолин-11-она или их солей | 1981 |
|
SU1192614A3 |

