Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования.
Известен способ обнаружения пространственно-временных шумовых сигналов, основанный на многоканальном по пространству полностью адаптивном приеме шумовых сигналов и адаптивном подавлении шумов помех с использованием оценки коэффициентов корреляции акустических помех, см. В.А.Лазуткин. Статистические методы обработки гидроакустических сигналов. Киев: Наукова думка. 1987. Гл.1, р.2, 3; В.Н.Фомин. Рекуррентное оценивание и адаптивная фильтрация. М.: Наука, 1984. с.87-88; «Подводная акустика и обработка сигналов» под ред. Л.Бьерне, М.: Мир, 1985, с.300-301 и с.321-323; A.M.Vural, Effects of perturbations on the performance of optimum/adaptive array // IEEE Transactions, 1979, vol. AES-15, #1, p.76-87. Одним из главных недостатков этого способа является то, что в некоторых случаях высокая стоимость может препятствовать применению полностью адаптивной системы или просто не возникает надобность в таких характеристиках, которые она может обеспечить.
Известно упрощение этого способа обнаружения и уменьшения стоимости (за счет уменьшения и степени оптимальности). Способ упрощают при использовании анализа положения фронта волны (интенсивных направленных шумовых помех) и обработки либо в пространстве элементов дискретной гидроакустической антенны либо в пространстве лучей (пространственных каналов) в так называемых системах с частично заданной структурой, см. цитируемую книгу под ред. Л.Бьерне, М.: Мир, 1985, с.284-286, а также А.Б.Бэггеройер. Обработка сигналов в гидролокации // Применение цифровой обработки сигнала, под ред. Э.Оппенгейма. М.: Мир. 1980, р.6.4; patent 3763490 US, 1973, Adaptive beamformer and signal processor for sonar.
Этот анализ базируется на представлении поля сигналов с использованием плоских волн, см. Ю.Г.Сосулин, Ю.Н.Паршин. Оценочно-корреляционно-компенсационные алгоритмы обнаружения многомерных сигналов. Радиотехника и электроника. 1981. Вып.26. №8. С.1635-1643, а также: R.R.Ramseyer, S.D.Morgera. A distributed microprocessor architecture far fixed and mobile acoustic array adaptive beamforming. IEEE Journal of oceanic engineering. 1979. Vol.OE-4, # 2. p.46-51; D.J.Chapman. Partial adapting for the large array // IEEE transaction on AP, 1976, vol.24, #5, p.685-696; D.A.Gray. Formulation of the maximum signal-to-noise ratio array processor in beam space // JASA, 1982, v.72, #4, p.1195-1201.
Все эти способы имеют недостатки, связанные с условиями функционирования системы обнаружения с частично заданной структурой. В неблагоприятных условиях, которые определяются особенностями помехи и наличием интенсивных направленных источников помех, акустикой окружающей среды (профиль скорости звука, глубина и наклон дна и т.п.), их эффективность может резко ухудшиться. Недостатком указанных способов является необходимость либо наличия нескольких ориентированных в пространстве приемных каналов сопровождения по пеленгу волновых фронтов источников шумоизлучения, либо наличия многоканальных корреляторов шумовых сигналов всей дискретной апертуры гидроакустической антенны. Следствием указанных факторов являются высокие затраты на реализацию способа обнаружения и относительно низкая устойчивость и достоверность обнаружения.
Наиболее близким по технической сущности к заявляемому способу является способ обнаружения, изложенный в заявке РФ №2005113369/09(015399) от 03.05.2005 г. (решение от 21.09.2006 г. о выдаче патента). Шумовой сигнал принимают (фактически имеется ввиду прием смеси сигнала шумоизлучения и помехи) антенной, которая предполагается остро направленной в вертикальной и горизонтальной плоскости.
В способе-прототипе реализуются операции приема шумовых сигналов в горизонтальной и вертикальной плоскости многоэлементной антенной решеткой гидролокатора и осуществляют первичную обработку, для чего:
преобразуют в цифровую форму напряжения шумовых сигналов антенной решетки, выполняют преобразование Фурье отсчетов напряжений шумовых сигналов антенной решетки, вычисляют для каждого из полученных частотных отсчетов амплитудные и фазовые коэффициенты синфазного сложения напряжений сигналов антенной решетки, суммируют выходные напряжения сигналов антенной решетки с постоянными весами, равными произведению амплитудных и фазовых коэффициентов, чем образуют пространственные каналы наблюдения в горизонтальной и вертикальной плоскостях, осуществляют оптимизированную частотно-временную обработку принятых шумовых сигналов для каждого пространственного канала наблюдения в горизонтальной плоскости;
после этого квадрируют и осуществляют вторичную обработку на каждом цикле обзора, для чего:
суммируют по всем частотным отсчетам выходные напряжения образованных пространственных каналов в фиксированном частотном диапазоне, усредняют по времени, центрируют и нормируют шумовые сигналы к помехе, осуществляют наблюдение на каждом цикле обзора полученных отметок принятых шумовых сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха.
Оптимизированная частотно-временная обработка заключается в том, что:
осуществляют прием шумового сигнала статическим вертикальным веером одновременно в нескольких направлениях вертикальной плоскости каждого пространственного канала наблюдения в составе статического веера в горизонтальной плоскости, оптимизируют прием каждым горизонтальным пространственным каналом путем выбора наиболее вероятных углов приема в вертикальной плоскости для существующих гидроакустических условий подводного наблюдения для чего:
осуществляют обработку принимаемых шумовых сигналов с весами, пропорциональными расчетному отношению сигнал-помеха в вертикальных пространственных каналах, перед накоплением на последовательных циклах обзора и суммируют с расчетными весами принятые нормированные к помехе шумовые сигналы вертикальных пространственных каналов.
Способ хорошо работает при изотропной шумовой помехе и при анизотропных шумах моря, в условиях, когда можно пренебречь вкладом интенсивных помех направленных источников, приходящих с других направлений в горизонтальной плоскости. При этом наибольшей эффективности обнаружения шумовых сигналов достигают при максимизации коэффициента концентрации и коэффициента помехоустойчивости в направлении приема шумового сигнала. Здесь и далее использованный термин "коэффициент помехоустойчивости" является обобщающим по отношению к классическому термину "коэффициент концентрации" (см. Справочник по гидроакустике, Л.: Судостроение, 1988, с.305, 308-309). Помехоустойчивость антенны в дальнем анизотропном поле помех может определяться в этом случае через пространственный спектр поля распределенных помех.
Недостатком способа является то, что этот способ не позволяет обеспечить одновременно максимизацию указанных коэффициентов. К недостаткам прототипа относится низкая избирательность к помехе направленных источников вследствие ограничений габаритов антенны на носителях и наличия флуктуации волновых фронтов источников в большом пространственном интервале. Кроме того, отсутствует обеспечение селекции направленных шумовых помех, ориентированной на получение высокого разрешения. Весовое суммирование, примененное в прототипе, приводит к успеху в условиях относительно слабых направленных шумовых помех. Использование обработки с постоянными весовыми коэффициентами проблематично при сближении сигнала по углу с направленными шумовыми помехами или при воздействии интенсивных шумовых помех, что приводит к пропаданию сигнала на длительное время.
Задачей изобретения является: повышение избирательности к помехе направленных источников при наличии указанных ограничений, обеспечение селекции направленных шумовых помех, ориентированной на получение высокого разрешения, т.е. создание способа обнаружения шумящих объектов, который одновременно позволил бы с большей достоверностью, чем в способе прототипа определить наличие шумового сигнала цели и длительно поддерживать акустический контакт с целью, уменьшив время маскирования помехой и пропадания сигнала с потерей акустического контакта.
Техническим результатом заявляемого способа является повышение достоверности обнаружения и длительного поддержания контакта цели путем учета гидроакустических условий наблюдения шумящих объектов и более полной селекции шумовых сигналов в аддитивной смеси направленных шумовых помех по углу в вертикальной или горизонтальной плоскости.
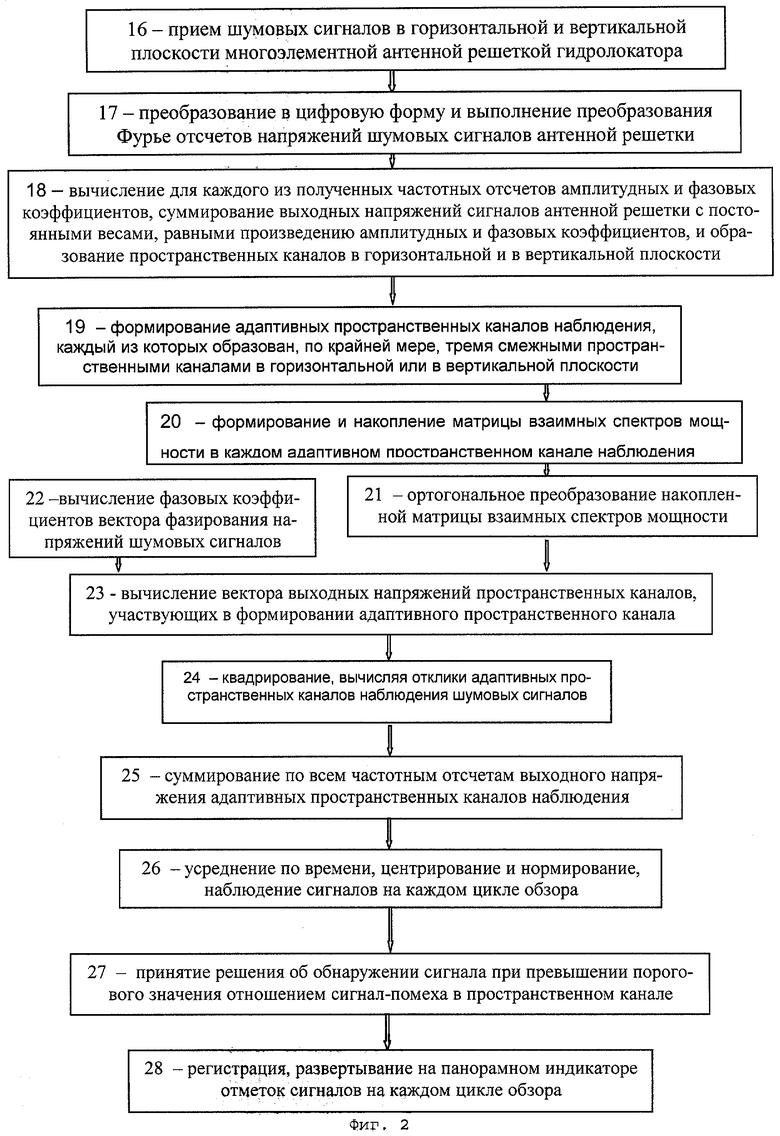
Для обеспечения указанного технического результата в способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне, при котором принимают шумовые сигналы в горизонтальной и вертикальной плоскостях многоэлементной антенной решеткой гидролокатора и осуществляют первичную обработку, для чего:
преобразуют в цифровую форму напряжения шумовых сигналов антенной решетки, выполняют преобразование Фурье отсчетов напряжений шумовых сигналов антенной решетки,
вычисляют для каждого из полученных частотных отсчетов амплитудные и фазовые коэффициенты синфазного сложения напряжений сигналов антенной решетки,
суммируют выходные напряжения сигналов антенной решетки с постоянными весами, равными произведению амплитудных и фазовых коэффициентов, чем образуют пространственные каналы наблюдения в горизонтальной и вертикальной плоскостях,
квадрируют и осуществляют вторичную обработку на каждом цикле обзора, для чего:
суммируют по всем частотным отсчетам выходные напряжения образованных пространственных каналов в фиксированном частотном диапазоне,
усредняют по времени, центрируют и нормируют шумовые сигналы к помехе,
осуществляют наблюдение на каждом цикле обзора полученных отметок принятых шумовых сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха,
введены новые признаки, а именно, на каждом цикле обзора до квадрирования для каждого частотного отсчета формируют адаптивные пространственные каналы наблюдения, каждый из которых образован, по крайней мере, тремя смежными пространственными каналами в горизонтальной или в вертикальной плоскостях, для чего:
формируют взаимные спектры мощности между шумовыми сигналами пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения,
накапливают взаимные спектры мощности шумовых сигналов для заданного времени накопления,
составляют матрицу накопленных взаимных спектров мощности шумовых сигналов и осуществляют ортогональное преобразование матрицы,
вычисляют векторы фазовых коэффициентов синфазного сложения сигналов пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения,
вычисляют вектор выходных напряжений пространственных каналов, участвующих в формировании адаптивного пространственного канала путем решения векторно-матричного уравнения, записанного для ортогонально преобразованной матрицы накопленных взаимных спектров мощности и вектора фазовых коэффициентов синфазного сложения,
квадрирование производят, вычисляя отклик полученного адаптивного пространственного канала наблюдения, который равен обратной величине, равной сумме квадратов элементов вектора выходных напряжений,
а вторичную обработку осуществляют для выходных напряжений адаптивных пространственных каналов наблюдения.
Известно, что введение весовой обработки шумовых сигналов по адаптивному алгоритму позволяет повысить избирательность к помехе направленных источников при наличии указанных выше ограничений, обеспечить селекцию направленных шумовых помех, ориентированной на получение высокого разрешения. Однако адаптация, произведенная по полной схеме, то есть при большом количестве пространственных каналов многоэлементной антенной решетки гидролокатора, сильно усложняет процедуру и увеличивает время вычислительных операций пространственно - частотно - временной обработки с адаптацией.
Предлагаемый способ обнаружения шумовых сигналов, благодаря тому, что корреляционная матрица шумовых сигналов может быть сокращена до размеров пространства сигналов, позволяет выполнять обработку информации, поступающей от смежных пространственных каналов в уменьшенном количестве, с помощью адаптивных устройств упрощенной структуры.
Предлагаемое изобретение иллюстрируется графическими изображениями, на которых показаны: на фиг.1 - блок-схема устройства, реализующего заявляемый способ, на фиг.2 - блок-схема способа обнаружения как последовательность операций.
Способ обнаружения реализуется устройством - шумопеленгаторной станцией с системой пространственной обработки сигналов - УФХН (см. "Гидроакустические средства...", Карякин Ю.А., Смирнов С.А., Яковлев Г.Н., 2005 г., стр.173, рис.2.5).
Устройство обнаружения шумящих в море объектов фиг.1 состоит из многоэлементной, например, цилиндрической гидроакустической антенны 1. Элементы антенны соединены с устройством предварительной обработки, далее - с системами пространственной обработки блока 2, затем первичной обработки информации 5.1...5.А и системой вторичной обработки информации 11.
Предлагаемый способ осуществляется с помощью приемной системы следующим образом.
Шумовые сигналы принимаются многоэлементной гидроакустической антенной 1 в горизонтальной и в вертикальной плоскости. В блоках 2-4 (операции 16-18, фиг.2) формируют статический горизонтальный и вертикальный веер соответственно М и N характеристик направленности. Шумовые сигналы принимают каждым из А=М*N пространственных каналов, которые получены для частоты fk (где fk=kΔf, Δf - заранее выбранный шаг по частоте в результате выполнения в блоке 2 операции 17 преобразования Фурье отсчетов напряжений шумовых сигналов). Целые числа k находятся в интервале от kн до kв, при этом фиксированный частотный диапазон расположен в интервале от  до
до 
Далее в блоках 6 (6.1...6.А) производят формирование А (операция 19, фиг.2) адаптивных пространственных каналов наблюдения, каждый из которых образован, по крайней мере, тремя смежными пространственными каналами в горизонтальной Q=3 или в вертикальной плоскости R=3. При этом используют выходы смежных пространственных каналов, разнесенные по углу в горизонтальной или вертикальной плоскости обзора, по крайней мере, на ширину характеристики направленности для k-той частотной составляющей. Согласно результатам проведенного моделирования заявляемого способа целесообразен выбор каналов с данным разнесением по углу, так как при большем разнесении уменьшается помехоустойчивость обнаружителя, а при меньшем - понижается устойчивость адаптивного алгоритма, возникают ложные сигналы.
Затем в блоках 7 (7.1...7.А) производят в каждом из А адаптивных пространственных каналов формирование и накопление в течение заданного времени взаимных спектров мощности  шумовых сигналов пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения. При этом составляют матрицу ФПК размера соответственно Q×Q или R×R накопленных взаимных спектров мощности
шумовых сигналов пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения. При этом составляют матрицу ФПК размера соответственно Q×Q или R×R накопленных взаимных спектров мощности  шумовых сигналов (операция 20, фиг.2).
шумовых сигналов (операция 20, фиг.2).
В блоках 8 (8.1...8.А) осуществляют ортогональное преобразование матрицы ФПК (операция 21), используя процедуры треугольного разложения матрицы на множители  и
и  в матричном виде
в матричном виде
где 
 - нижняя и верхняя треугольные матрицы с элементами, вычисленными по алгоритму квадратного корня (см. например, в книге Б.П.Демидовича и И.А.Марона "Основы вычислительной математики", М., Гос. изд. физ. - мат. л-ры, 1963, стр.287-288).
- нижняя и верхняя треугольные матрицы с элементами, вычисленными по алгоритму квадратного корня (см. например, в книге Б.П.Демидовича и И.А.Марона "Основы вычислительной математики", М., Гос. изд. физ. - мат. л-ры, 1963, стр.287-288).
В блоках 15 (15.1...15.А) вычисляют фазовые коэффициенты соответственно Рq(ϕ0, θ0, k) или Рr(ϕ0, θ0, k) и формируют вектор с элементами Рq(ϕ0, θ0, k) или Рr(ϕ0, θ0, k) синфазного сложения сигналов в плоской волне для фазовых центров Q или R пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения. Возможен также очевидный вариант реализации, при котором элемент Рq(ϕ0, θ0, k) и Рr(ϕ0, θ0, k) вычисляют, например, как характеристику направленности антенной решетки для плоской волны (операция 22). Упомянутые расчеты могут быть проведены по алгоритмам, приведенным, например, в книге Матвиенко В.Н., Тарасюка Ю.Ф. "Дальность действия гидроакустических средств", Л., Судостроение, 1981 г., стр.212-214. Совокупность операций 22 в блоках 15 (15.1...15.А) реализуется путем предварительного расчета и запоминания фазовых коэффициентов. Рассчитанные значения фазовых коэффициентов Рq(ϕ0, θ0, k) и Рr(ϕ0, θ0, k) заносятся в долговременную (постоянную) память запоминающего устройства.
Операции 22 в блоках 15 (15.1...15.А) проводят независимо от остальных операций и обеспечивают получение данных для вычислительных операций 23.
В блоках 9 (9.1...9.А) вычисляют на k-той частоте совокупность Q или R спектральных откликов  или
или  образующих соответственно вектор
образующих соответственно вектор  или
или  выходных напряжений пространственных каналов, участвующих в формировании адаптивного пространственного канала (операция 23). Вычисление осуществляют по формуле в векторно-матричном виде
выходных напряжений пространственных каналов, участвующих в формировании адаптивного пространственного канала (операция 23). Вычисление осуществляют по формуле в векторно-матричном виде  где соответственно Р={Рq(ϕ0,θ0,k)} или Р={Pr(ϕ0,θ0,k} - вектор-столбец фазовых коэффициентов,
где соответственно Р={Рq(ϕ0,θ0,k)} или Р={Pr(ϕ0,θ0,k} - вектор-столбец фазовых коэффициентов,  - нижняя треугольная матрица ортогонального разложения матрицы взаимных спектров мощности ФПК. Упомянутые расчеты могут быть проведены по алгоритмам, приведенным, например, в упомянутой книге Б.П.Демидовича и И.А.Марона, глава VIII, §2.
- нижняя треугольная матрица ортогонального разложения матрицы взаимных спектров мощности ФПК. Упомянутые расчеты могут быть проведены по алгоритмам, приведенным, например, в упомянутой книге Б.П.Демидовича и И.А.Марона, глава VIII, §2.
В блоках 10 (10.1...10.А) вычисляют для k-той частотной составляющей отклик каждого из А адаптивных пространственных каналов наблюдения  в горизонтальной или вертикальной плоскости (операция 24), равный обратной величине суммы квадратов элементов вектора выходных напряжений, для горизонтальной плоскости по формуле
в горизонтальной или вертикальной плоскости (операция 24), равный обратной величине суммы квадратов элементов вектора выходных напряжений, для горизонтальной плоскости по формуле
или для вертикальной плоскости по формуле
В блоке 12 суммируют по всем частотным отсчетам отклики каждого из А адаптивных пространственных каналов наблюдения в фиксированном частотном диапазоне  усредняют по времени, центрируют и нормируют, производят наблюдение сигналов на каждом цикле обзора (операции 25 и 26).
усредняют по времени, центрируют и нормируют, производят наблюдение сигналов на каждом цикле обзора (операции 25 и 26).
Принимают решение об обнаружении сигнала в блоке 13 при превышении порогового значения отношением сигнал-помеха в пространственном канале (операция 27); регистрация, развертывание на панорамном индикаторе отметок сигналов на каждом цикле обзора реализуется в блоке 14 (операция 28).
Результаты моделирования заявляемого способа показали, что применение управления амплитудно-фазовым распределением по адаптивному алгоритму смежных пространственных каналов, которые уже обладают высокой пространственной избирательностью к распределенной помехе, обеспечивают большую помехоустойчивость, чем применение управления амплитудно-фазовым распределением слабо направленных приемников антенной решетки.
Это позволило обнаруживать шумящие объекты с большей достоверностью, чем в способе прототипа, раньше определять наличие сигнала цели и длительно поддерживать акустический контакт с целью, уменьшив время маскирования помехой и время пропадания сигнала с потерей акустического контакта. При этом сохраняется высоким коэффициент концентрации гидроакустической антенны.
Наряду с упомянутым выше моделированием заявляемого объекта с имитацией сигналов и помех была проведена обработка и записей реальных сигналов и помех, выполненных в натурных условиях, которая подтвердила полученные результаты моделирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ НАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2515179C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК ПО ГОРИЗОНТАЛЬНОМУ И ВЕРТИКАЛЬНОМУ УГЛУ | 2011 |
|
RU2492498C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования. Достигаемым техническим результатом изобретения является повышение достоверности обнаружения и длительного поддержания контакта с шумящей движущейся в море целью. Способ включает прием шумовых сигналов статическим веером характеристик направленности в горизонтальной и вертикальной плоскости, частотно-временную обработку в каждом пространственном канале наблюдения, квадрирование, усреднение по времени, центрирование и нормирование сигналов к помехе, наблюдение на текущем цикле обзора принятых нормированных сигналов и принятие решения об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, при этом на каждом цикле обзора для каждого частотного отсчета формируют адаптивные пространственные каналы наблюдения, каждый из которых образован, по крайней мере, тремя смежными пространственными каналами в горизонтальной или в вертикальной плоскости. 2 ил.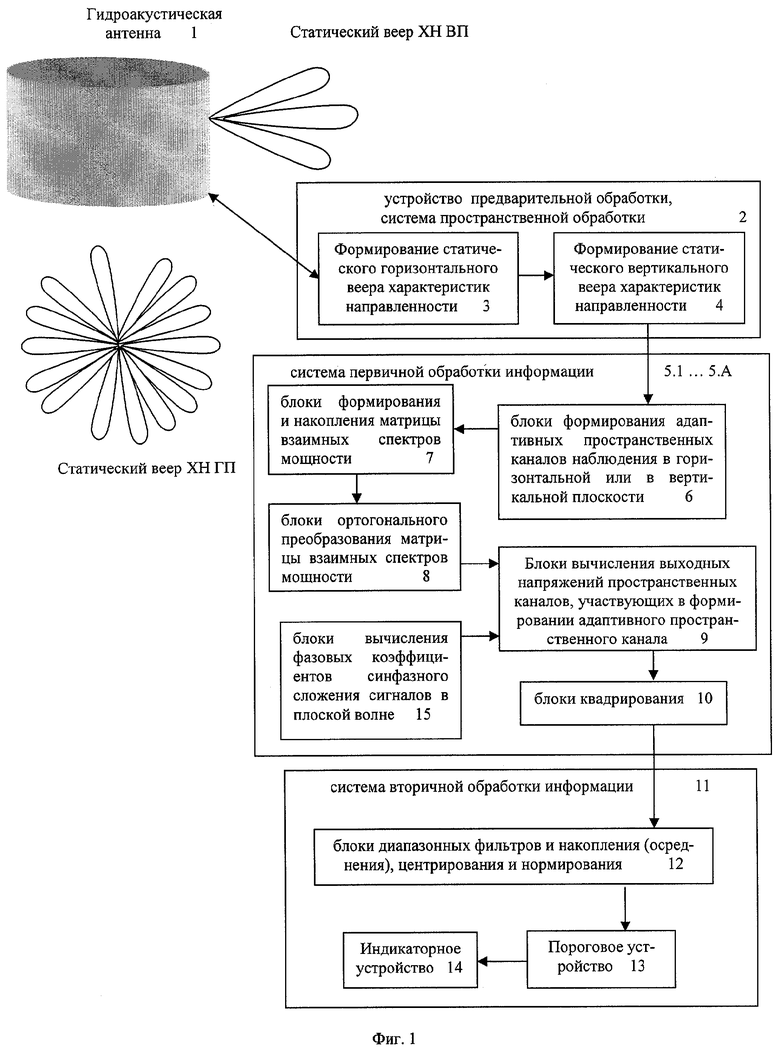
Способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне, при котором принимают шумовые сигналы в горизонтальной и вертикальной плоскостях многоэлементной антенной решеткой гидролокатора и осуществляют первичную обработку, для чего преобразуют в цифровую форму напряжения шумовых сигналов антенной решетки, выполняют преобразование Фурье отсчетов напряжений шумовых сигналов антенной решетки, вычисляют для каждого из полученных частотных отсчетов амплитудные и фазовые коэффициенты синфазного сложения напряжений сигналов антенной решетки, суммируют выходные напряжения сигналов антенной решетки с постоянными весами, равными произведению амплитудных и фазовых коэффициентов, чем образуют пространственные каналы наблюдения в горизонтальной и вертикальной плоскостях, квадрируют и осуществляют вторичную обработку на каждом цикле обзора, для чего суммируют по всем частотным отсчетам выходные напряжения образованных пространственных каналов в фиксированном частотном диапазоне, усредняют по времени, центрируют и нормируют шумовые сигналы к помехе, осуществляют наблюдение на каждом цикле обзора полученных отметок принятых шумовых сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, отличающийся тем, что на каждом цикле обзора до квадрирования для каждого частотного отсчета формируют адаптивные пространственные каналы наблюдения, каждый из которых образован, по крайней мере, тремя смежными пространственными каналами в горизонтальной или в вертикальной плоскости, для чего формируют взаимные спектры мощности между шумовыми сигналами пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения, накапливают взаимные спектры мощности шумовых сигналов для заданного времени накопления, составляют матрицу накопленных взаимных спектров мощности шумовых сигналов и осуществляют ортогональное преобразование матрицы, вычисляют векторы фазовых коэффициентов синфазного сложения сигналов пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения, вычисляют вектор выходных напряжений пространственных каналов, участвующих в формировании адаптивного пространственного канала путем решения векторно-матричного уравнения для ортогонально преобразованной матрицы накопленных взаимных спектров мощности и вектора фазовых коэффициентов синфазного сложения сигналов, квадрирование производят, вычисляя отклик полученного адаптивного пространственного канала наблюдения, равного обратной величине суммы квадратов элементов вектора выходных напряжений, а вторичную обработку осуществляют для выходных напряжений адаптивных пространственных каналов наблюдения.
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| RU 94036232 А1, 20.07.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| АВТОМАТИЗИРОВАННАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ УПАКОВКИ РАДИОАКТИВНЫХ ОТХОДОВ | 1992 |
|
RU2012081C1 |
| US 3774159, 20.11.1973 | |||
| JP 2006250830, 21.09.2006. | |||

