Изобретение относится к гидроакустике, технической акустике и может быть использовано для построения гидроакустических систем обнаружения шумящих целей бортовыми (или иными) антеннами с существенно не идентичными характеристиками направленности пространственных каналов в анизотропном поле помех.
Известны способ и устройство обнаружения, изложенные в монографии [1], которые используются как прототип в большинстве патентов, касающихся обнаружения шумящих морских объектов, в соответствии с которым с помощью антенны и энергетического приемника сигнала можно обнаружить цель в пассивном режиме путем сравнения отношения сигнал/помеха в зоне акустической освещенности с пороговым значением.
Звуковой сигнал принимают (фактически имеется в виду прием смеси сигнала шумоизлучения и помехи) антенной в системе с многолучевой диаграммой. Широкополосный сигнал с выхода веера горизонтальных пространственных каналов приемной антенны подается на энергетический приемник с заданным временем усреднения и панорамный индикатор, причем используется модуляция яркости луча. Здесь и далее использованный термин «веер пространственных каналов» является обобщающим по отношению к классическому термину «многолучевая диаграмма направленности» [2], когда совокупность смежных пространственных каналов расположена веером с дискретным по углу шагом.
Каждая развертка выходов веера на одном цикле обзора воспроизводится на индикаторе как линия, модулированная по яркости или амплитуде. Последующие развертки на циклах обзора смещаются вниз по отношению к предыдущим. Разрешающая ячейка, регистрирующая цель в пространственном канале веера, связана с отметкой, появляющейся на одинаковом расстоянии от края индикатора для каждой развертки.
Решение об обнаружении принимает гидроакустик по всплескам яркости или амплитуды в каждом цикле обзора. Наблюдение в этом случае осуществляется при пороге, когда, например, половина разрешающих ячеек по времени дает на индикаторе отметки помехи, а отметка «сигнал плюс помеха» появляется в той ячейке пространственного канала, к которой он принадлежит, приблизительно три четверти общего времени всех циклов обзора [1].
Этот способ обнаружения содержит следующие операции:
- прием гидроакустического шумового сигнала с помощью приемной антенны с развитой апертурой в горизонтальной плоскости,
- частотно-временную обработку принятых шумовых сигналов для каждого пространственного канала наблюдения в горизонтальной плоскости, включающую квадрирование и усреднение в полосе частот,
- измерение уровня на выходе пространственного канала веера, включая накопление во времени, центрирование и нормирование в единицах отношения сигнал/помеха,
- развертывание на последовательных циклах обзора принятых сигналов пространственных каналов веера в горизонтальной плоскости на панорамном индикаторе в координатах угол - время. Обнаружение при этом на одном цикле обзора осуществляется оператором сравнением уровней процесса по соседним направлениям.
Выход в текущий момент времени всех пространственных каналов (ПК) после детектирования и накопления по времени далее называется прединдикаторным процессом (ПИП).
Рассмотренный способ может быть реализован с помощью устройства обнаружения гидроакустических сигналов, структурная схема которого приведена в [3, стр. 53]. Устройство для обнаружения сигналов содержит последовательно соединенные акустическую приемную антенну, блок предварительной обработки гидроакустической информации (включающий усиление, фильтрацию и аналого-цифровое преобразование), блок пространственной обработки сигналов - систему формирования веера пространственных каналов, блок частотно-временной обработки, включающий квадратичное детектирование и интегрирование процессов на выходе блока пространственной обработки, блок принятия решения о наличии сигнала - пороговое устройство, индикаторное устройство. Это устройство является ближайшим аналогом заявляемого.
Способ и устройство хорошо работают в однородной среде и в условиях, когда можно пренебречь влиянием условий распространения звука. В реальном море в акустическом поле, неоднородном и анизотропном, алгоритм показал неудовлетворительную работу, давал большое количество ложных сигналов - отметок помехи и неустойчиво обнаруживал слабые полезные сигналы.
При создании автоматических обнаружителей возможны два независимых подхода к улучшению качества обнаружения шумящих объектов:
- улучшение качества обнаружения для одного цикла развертки (одноактное обнаружение);
- увеличение фактического времени накопления за счет накопления во времени текущей информации о сигнале, что позволяет с большей достоверностью определить наличие сигнала цели и длительно поддерживать акустический контакт с целью.
Второй подход при использовании автоматического одноактного обнаружения использован в [4]: на каждом цикле обзора для каждого канала наблюдения в горизонтальной плоскости центрируют и нормируют сигналы к помехе, осуществляют наблюдение отметок принятых шумовых сигналов всей совокупности пространственных каналов в горизонтальной плоскости и принимают решение о его обнаружении путем сравнения с пороговым значением отношения сигнал/помеха, в процессе приема осуществляют накопление энергии сигнала на нескольких циклах обзора за счет сопровождения информационных параметров шумового сигнала.
Способ хорошо зарекомендовал себя при приеме сигналов осесимметричными антеннами, характеристики которых не зависят от направления обзора, и при приеме сигналов в небольшом диапазоне углов. Однако, при использовании антенн иных форм, характеристики направленности которых в различных направлениях наблюдения не идентичны, а сектор обзора достаточно широкий, потеря возможности обнаружения сигнала цели происходит уже на первом этапе - при одноактном обнаружении, поскольку контрастность отметки слабого сигнала на фоне даже небольшой анизотропии помех снижается, и сигнал не обнаруживается. Кроме того, при приеме реальных сигналов не гарантируется отсутствие сосредоточенных источников помехи, также снижающих контрастность сигнала, принимаемого на фоне их бокового анизотропного поля.
Для подобных обнаружителей необходима оценка характеристик помехи и сигнала, и отношение сигнал/помеха является одним из основных параметров, на основе которых реализуются алгоритмы обнаружения, определяется помехоустойчивость систем обнаружения и их основные характеристики, такие как вероятность правильного обнаружения и вероятность ложной тревоги.
В [5, стр. 24-33] описаны наиболее распространенный способ и соответствующее ему устройство оценки уровня помехи и отношения сигнал/помеха, при котором в каждом канале обнаружения производится измерение энергии смеси сигнала с помехой и отдельно энергии помехи, после чего определяется искомое отношение сигнал/помеха на выходе системы после обработки суммарного процесса. В [6] для увеличения дальности действия системы шумопеленгования предложен аналогичный способ оценки уровня помехи и отношения сигнал/помеха для сформированных пространственных каналов для вертикальной антенной решетки.
Недостатком этих способов является необходимость измерения как энергии принятого на фоне помехи сигнала, так и отдельно энергии помехи, что до обнаружения сигнала шумоизлучения подводных и надводных объектов в реальных условиях практически невозможно. Общим недостатком методов, использующих при обнаружении отношение сигнал/помеха, также является необходимость оценивать уровень сигнала как разность между уровнем прединдикаторного процесса, полученного для смеси сигнала и помехи, и уровнем прединдикаторного процесса в ситуации отсутствия сигнала (оценка энергии помехи), а при несинхронных измерениях этих величин появляются дополнительные ошибки, определяемые случайным характером и временной нестационарностью как помехи, так и сигнала. Кроме того, в этом случае появляется нелинейная операция - деление на уровень помехи, которая также может приводить к дополнительным ошибкам оценивания отношения сигнал/помеха, и, как следствие, к потере контакта с целью.
Указанных недостатков частично лишен принятый за прототип способ обнаружения, изложенный в работе [7, стр. 62-67], основанный на сравнении решающей статистики - значений прединдикаторного процесса в каждом сформированном пространственном канале наблюдения - с рассчитываемым для этого канала порогом обнаружения:
h=m0+σ0Ф-1(1-РЛТ)=m0+kσ0,
где h - порог обнаружения, m0 и σ0 - математические ожидания и дисперсии предындикаторного процесса в ситуации отсутствия сигнала,  - функция распределения гауссовского распределения, Ф-1 - обозначение для обратной к Ф функции (такой, что Ф(Ф-1(x))=x), РЛТ - заданная вероятность ложной тревоги, k=Ф-1(1-РЛТ) - константа, зависящая от величины вероятности ложных тревог.
- функция распределения гауссовского распределения, Ф-1 - обозначение для обратной к Ф функции (такой, что Ф(Ф-1(x))=x), РЛТ - заданная вероятность ложной тревоги, k=Ф-1(1-РЛТ) - константа, зависящая от величины вероятности ложных тревог.
Недостатком данного способа обнаружения сигналов является то, что он сформулирован для одного пространственного канала наблюдения, и его использование в многоканальной системе требует корректных оценок помехи - ее среднего и дисперсии в каждом таком канале.
Различные способы оценки отношения сигнал/помеха [5, 6], содержащие оценку помехи, требуют либо существенного усложнения аппаратуры, либо хорошо работают только в условиях изотропного поля помех, либо вообще не реализуемы в реальных условиях. В связи с этим при построении тракта обнаружения в системе с бортовой антенной с существенно неидентичными характеристиками сформированных каналов возникла необходимость получения корректных оценок помехи для сложных помехосигнальных ситуаций в условиях анизотропного поля помех.
Задачей изобретения является автоматическое (без участия оператора) одноактное обнаружение акустических сигналов, принимаемых бортовой антенной с существенно неидентичными характеристиками пространственных каналов на фоне анизотропных нестационарных помех в режиме реального времени без отдельного измерения помехи для выработки порога обнаружения.
Технический результат заключается в достижении следующих эффектов: повышение достоверности обнаружения сигналов, уменьшение вероятности пропуска «слабых» сигналов, обеспечение заданного уровня вероятности ложных тревог, упрощение аппаратуры обработки, возможность функционирования обнаружителя в автоматическом режиме в системах обнаружения с бортовыми антенными решетками, характеристики которых не идентичны, но близки, без отдельного измерения уровня помех, что позволяет работать в режиме реального времени, в том числе при анизотропном поле помех.
Для обеспечения указанного технического результата в способ обнаружения шумящих в море объектов бортовой антенной, включающий прием первичного поля шумоизлучения объектов статическим веером характеристик направленности, частотно-временную обработку в каждом пространственном канале наблюдения, квадрирование и усреднение в полосе обработки частот ΔF и по времени на интервале длительности Т, получая тем самым массив оценок энергии смеси сигнала с помехой по множеству сформированных пространственных каналов  (где I – число пространственных каналов наблюдения в статическом веере) и принятие решения об обнаружении путем сравнения с пороговым значением, введены новые признаки, а именно: осуществляют разбиение массива U на N непересекающихся групп, в каждой группе с номером n находят минимум Pn массива U и его местоположение Sn, находят массив миноранты Wi как массив, заполненный значениями результата кусочно-линейной интерполяции между найденными точками минимумов входной развертки, выбираемых в точках расположения исходных ПК, выполняют эти операции Q раз (Q≥3) для разных значений N, определяют в каждом пространственном канале минимум по Q минорантам и строят по ним новый массив обобщенной миноранты
(где I – число пространственных каналов наблюдения в статическом веере) и принятие решения об обнаружении путем сравнения с пороговым значением, введены новые признаки, а именно: осуществляют разбиение массива U на N непересекающихся групп, в каждой группе с номером n находят минимум Pn массива U и его местоположение Sn, находят массив миноранты Wi как массив, заполненный значениями результата кусочно-линейной интерполяции между найденными точками минимумов входной развертки, выбираемых в точках расположения исходных ПК, выполняют эти операции Q раз (Q≥3) для разных значений N, определяют в каждом пространственном канале минимум по Q минорантам и строят по ним новый массив обобщенной миноранты  формируют массив
формируют массив  умножая значения М на константу, зависящую от полосы обработки частот ΔF и времени накопления Т массива U, порог обнаружения в каждом пространственном канале рассчитывают по формуле
умножая значения М на константу, зависящую от полосы обработки частот ΔF и времени накопления Т массива U, порог обнаружения в каждом пространственном канале рассчитывают по формуле  - константа, зависящая от требуемой величины вероятности ложных тревог, Ф-1 - обозначение функции, обратной к функции распределения гауссовского распределения
- константа, зависящая от требуемой величины вероятности ложных тревог, Ф-1 - обозначение функции, обратной к функции распределения гауссовского распределения  а решение об обнаружении принимают, сравнивая значения Ui с порогом
а решение об обнаружении принимают, сравнивая значения Ui с порогом  в каждом пространственном канале (здесь и далее в соответствии с общепринятыми обозначениями жирным шрифтом обозначены массивы).
в каждом пространственном канале (здесь и далее в соответствии с общепринятыми обозначениями жирным шрифтом обозначены массивы).
При наличии в секторе обзора двух и более сигналов наилучший результат достигается при введении в указанный выше способ дополнительных операций: по каждой из Q минорант производят проверку всех найденных минимумов на наличие ложных, вызванных близким соседством пары сильных сигналов. Это осуществляется поиском и исключением таких минимумов, которые превышают соседние (слева и (или) справа) на величину больше  где constδ - величина, выбираемая из априорных предположений о характере анизотропии поля помех.
где constδ - величина, выбираемая из априорных предположений о характере анизотропии поля помех.
Заявленный технический результат будет достигнут, если в устройство обнаружения шумящих в море объектов, содержащее последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок предварительной обработки гидроакустической информации, блок формирования веера пространственных каналов, блок формирования прединдикаторного процесса (ПИП), блок принятия решения - пороговое устройство, ввести дополнительно следующие блоки: спецпроцессор, который для трех различных разбиений множества всех ПК на непересекающиеся группы содержит три блока формирования массивов миноранты, каждый в виде ветки последовательно соединенных блоков: блока нахождения минимумов ПИП, блока отбраковки ложных минимумов и блока линейной интерполяции для формирования миноранты для всех ПК при данном разбиении на группы, при этом вход каждого блока нахождения минимумов ПИП соединен с соответствующим выходом блока формирования ПИП, также спецпроцессор содержит последовательно соединенные блок формирования обобщенной миноранты и блок оценки среднего и среднеквадратического отклонения (СКО) уровня помехи и выработки порога обнаружения в каждом пространственном канале; при этом выход каждого из блоков формирования массивов миноранты соединен с соответствующим входом блока формирования обобщенной миноранты, а выход блока оценки среднего и СКО уровня помехи и выработки порога обнаружения, соединен с первым входом блока принятия решения об обнаружении - порогового устройства, второй вход которого соединен с выходом блока формирования ПИП.
Предлагаемый способ и устройство обнаружения основаны на априорных предположениях о характере помехи. Прединдикаторные процессы являются результатом накопления по времени на интервале длительностью Т (сек) и по полосе ΔF квадратов гауссовских комплексных случайных величин, чье нормированное распределение подчиняется закону  (хи-квадрат с двумя степенями свободы) со средним, совпадающим с дисперсией. Полагая помеху на интервале Т стационарной с равномерным спектром, после накопления в полосе и по времени постоянная составляющая помехи
(хи-квадрат с двумя степенями свободы) со средним, совпадающим с дисперсией. Полагая помеху на интервале Т стационарной с равномерным спектром, после накопления в полосе и по времени постоянная составляющая помехи  и ее среднеквадратическое отклонение
и ее среднеквадратическое отклонение  связаны соотношением
связаны соотношением 
При большом числе пространственных каналов, изотропном поле помех, большом времени накопления и широкой полосе обработки, так что  и, следовательно, при поэлементном сравнении Е>>δ, минимумы прединдикаторных процессов (миноранта) после усреднения могут рассматриваться как приближенная оценка Е. Если
и, следовательно, при поэлементном сравнении Е>>δ, минимумы прединдикаторных процессов (миноранта) после усреднения могут рассматриваться как приближенная оценка Е. Если

где Ω - множество номеров пространственных каналов, по которым ищется минимум/максимум массива Е, то, распространяя этот подход на анизотропное поле помех, и пренебрегая на некотором подмножестве соседних ПК анизотропией, можно рассматривать минимум как оценку среднего на этом подмножестве. Для оценки анизотропного поля помех для остальных пространственных каналов, не совпадающих с точками минимумов, используется линейная интерполяция.
Таким образом, заранее производится разбиение множества всех ПК на N непересекающихся подмножеств (групп), с формированием массивов, элементы которых определяют размер групп для вычисления миноранты. Размер группы выбирается с учетом ширины характеристики направленности (ХН): ширина сектора, образованного осями крайних ПК, входящих в группу, должна быть больше ширины главного лепестка ХН, так как в ситуации наличия в некоторых каналах сигнала при оценивании уровня помехи необходимо обеспечить отсутствие минимумов, принадлежащим сигнальным участкам. Следует учесть, что если для круговых цилиндрических антенн размер группы - величина постоянная, то для бортовых и протяженных антенн она существенно зависит от отклонения ПК от нормали к антенне и должна определяться отдельно для каждой конфигурации антенны. Указанный технический результат достигается за счет одновременного (синхронного) анализа энергий суммарного процесса по множеству сформированных пространственных каналов, часть из которых содержит только помеху (возможно, анизотропную по пространству), и связи вероятностных характеристик (среднего и дисперсии) энергии процессов на выходе сформированных пространственных каналов с учетом большого интервала накопления по времени и по полосе частот.
В качестве оценки среднего значения помехи может приниматься увеличенная миноранта  где ConstEX - величина, лежащая в пределах (1-1,3), а оценка СКО помехи в каждом канале определяется как
где ConstEX - величина, лежащая в пределах (1-1,3), а оценка СКО помехи в каждом канале определяется как  Диапазон значений константы ConstEX определяется тем, что элементы массива миноранты М, будучи случайными величинами, могут отличаться от нужной оценки среднего значения помехи на величину до 3⋅СКО, соответственно значения смещения могут лежать в диапазоне (1-1,3)⋅СКО с известными для нормального закона вероятностями. На практике выбор значения ConstEX определяется критериями предпочтительности вероятности пропуска сигнала или ложной тревоги (соответственно несколько завышенный или заниженный порог).
Диапазон значений константы ConstEX определяется тем, что элементы массива миноранты М, будучи случайными величинами, могут отличаться от нужной оценки среднего значения помехи на величину до 3⋅СКО, соответственно значения смещения могут лежать в диапазоне (1-1,3)⋅СКО с известными для нормального закона вероятностями. На практике выбор значения ConstEX определяется критериями предпочтительности вероятности пропуска сигнала или ложной тревоги (соответственно несколько завышенный или заниженный порог).
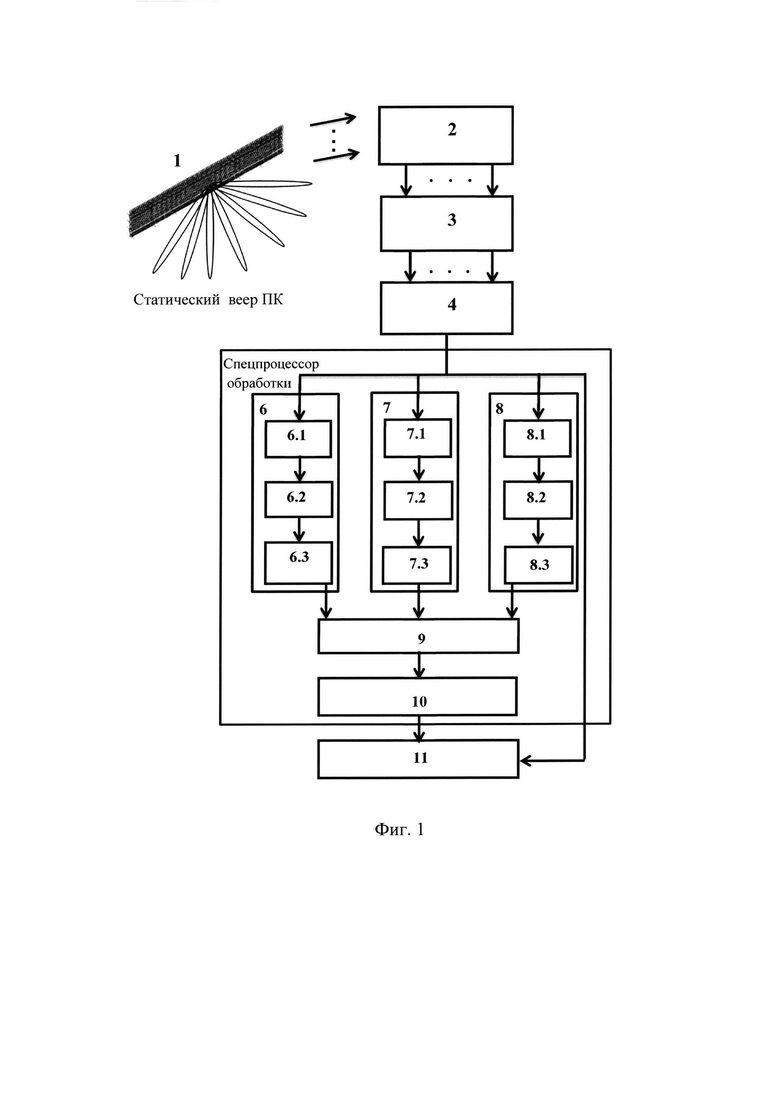
Сущность изобретения поясняется фиг. 1-3, где фиг. 1 - блок-схема реализации предложенного устройства в системе с бортовой антенной при трех различных наборах групп (число наборов Q=3 - выбрано для простоты и наглядности схемы), фиг. 2-3 - результат применения способа оценки уровня помехи при многоканальном обнаружении при наличии в секторе обзора приемной системы двух сильных сигналов на фоне анизотропной распределенной помехи.
Устройство, реализующее предлагаемый способ обнаружения сигналов, приведено на фиг. 1 и содержит следующие блоки:
- многоэлементную антенну 1 с существенно неидентичными характеристиками направленности пространственных каналов, например, бортовую, выходы которой соединены со входами блока 2 - блока предварительной обработки гидроакустической информации, выходы которого соединены со входами блока 3 - блока формирования веера пространственных каналов в горизонтальной (и возможно, в вертикальной) плоскости; выходы блока 3 поступают в блок 4 - блок формирования прединдикаторного массива U={Ui}, выход которого соединен с входами блоков 6, 7 и 8 спецпроцессора 5 - блоки формирования трех массивов минорант для трех различных вариантов разбиения массива U на группы, в каждом из блоков 6, 7 и 8 независимо выполняется последовательно одна и та же цепочка действий, но для различных заранее заданных разбиений массива U на группы: блоки 6.1, 7.1 и 8.1 - блоки нахождения минимумов массива U в непересекающихся группах каналов, блоки 6.2, 7.2 и 8.2 - блоки отбраковки так называемых ложных минимумов, вызванных близким соседством пары сильных сигналов, и не связанных с уровнем помехи в данном ПК, блоки 6.3, 7.3 и 8.3 - блоки формирования массивов миноранты, выходы которых поступают в блок 9; последовательно соединенные блок 9 - блок формирования массива обобщенной миноранты; блок 10 - блок оценивания среднего и СКО помехи и выработки порога обнаружения; блок 11 - блок принятия решения об обнаружении сигнала при превышении прединдикаторным процессом порогового значения, на второй вход которого поступает выход блока 4.
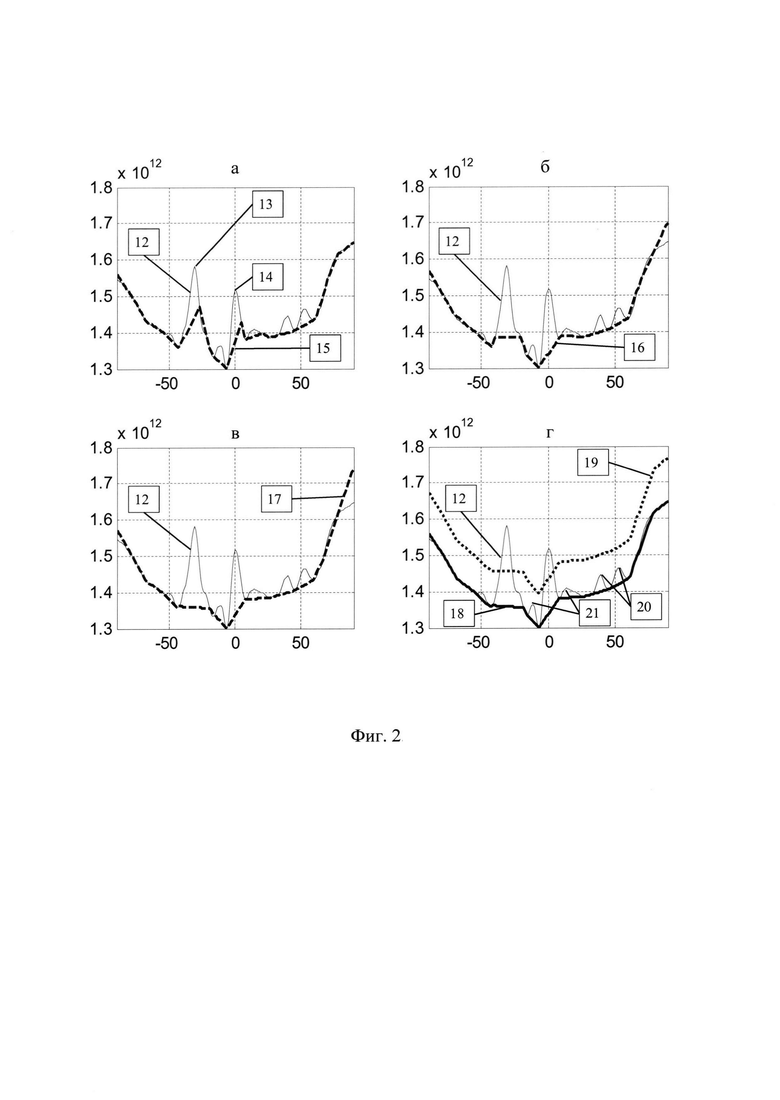
На фиг. 2: в координатах направление (в градусах) - уровень процесса (в условных единицах) изображены: 12 - прединдикаторный массив U с выхода блока 4 при наличии на входе антенны 1 двух сильных сигналов, принимаемых на фоне анизотропной по пространству помехи, 13 - локальный максимум предындикаторного процесса, соответствующий первому сигналу, 14 - локальный максимум предындикаторного процесса, соответствующий второму сигналу, 15 - оценка анизотропной составляющей помехи - миноранта с минимальным размером групп (фиг. 2а - число групп N=26), 16 - миноранта для групп среднего размера (фиг. 2б - число групп N=20), 17 - миноранта с самым большим размером групп (фиг. 2в - N=15), 18 - обобщенная миноранта (фиг. 2г), 19 - порог обнаружения в каждом канале обзора, построенный по предлагаемому способу, а также 20 и 21 - локальные максимумы массива U, не превысившие порога обнаружения.
На фиг. 3: в координатах направление (в градусах) - уровень процесса (в условных единицах) изображены: 22 - исходный прединдикаторный массив U при наличии на входе антенны 1 двух сильных сигналов с близких направлений на фоне анизотропной помехи, 23 - локальный максимум прединдикаторного процесса, соответствующий первому сигналу, 24 - локальный максимум прединдикаторного процесса, соответствующий второму сигналу, 25 - миноранта с минимальным размером групп, 26 - миноранта 25 после отбраковки ложных минимумов (фиг. 3а - число групп N=26), 27 - миноранта для групп среднего размера (фиг. 3б - число групп N=20), 28 - та же миноранта после отбраковки ложных минимумов, 29 - миноранта с самым большим размером групп (фиг. 3в - N=15), 30 - миноранта 29 после отбраковки ложных минимумов, 31 - обобщенная миноранта (фиг. 3г), 32 - обобщенная миноранта после отбраковки ложных минимумов, 33 - порог обнаружения в каждом канале обзора, построенный по предлагаемому способу.
Действие предлагаемого способа обнаружения сигналов можно показать на примере работы заявленного устройства, схема которого показана на фиг. 1.
В блоке 1 принятые многоэлементной бортовой гидроакустической антенной акустические сигналы, содержащие шумы моря (изотропная помеха) и сигналы локальных источников излучения, преобразуются в электрические сигналы. В блоке 2 сигналы проходят первичную обработку: усиление, частотную фильтрацию, цифровое преобразование, ограничение полосы частот, преобразование Фурье (ПФ) с заданным интервалом ТПФ, в результате которого на выходах блока 2, соединенных с соответствующими входами блока 3, получают сигналы в частотной области. В блоке 3 формируют веер пространственных каналов, оси ХН которых ориентированы в направлениях αпкi в секторе наблюдения αmin ≤ αпкi ≤ αmax с заданной угловой дискретностью Δα, получая в результате на каждой дискретной частоте ПФ ƒr=rΔƒ, для каждого направления αпкi выходной сигнал с сумматора антенны xi(ƒr). В блоке 4 выходы сформированных пространственных каналов xi(ƒr) квадрируют, на каждом цикле ПФ суммируют по частоте ƒr в пределах полосы частот от ƒн до ƒв (здесь «н» - значение нижней границы частот, «в» - значение верхней границы чатот) с заданной частотной характеристикой h(ƒr) и накапливают во времени на заданном интервале Т, получая прединдикаторный массив U. В блоках 6, 7 и 8 осуществляют параллельно формирование трех массивов минорант для трех различных заранее заданных наборов групп, например, минимальной длины (блок 6, с числом групп N1), средней (блок 7, число групп N2) и максимальной длины (блок 8, число групп N3). Для этого в идентичных по структуре блоках 6.1, 7.1 и 8.1 производят разбиение массива U на непересекающиеся группы в соответствии с заданным набором групп, в каждой такой группе (для числа групп N=Nq, q=1, 2, 3) последовательно находят минимумы и их положение в массиве U:  - значение минимума в n-ой группе,
- значение минимума в n-ой группе,  - номер канала, в котором этот минимум найден, n=1…N, N - число групп. В идентичных по структуре блоках 6.2, 7.2 и 8.2 осуществляется отбраковка части выделенных в блоках 6.1, 7.1 и 8.1 минимумов - так называемых ложных минимумов, вызванных близким соседством пары сильных сигналов, и не связанных с уровнем помехи в данном ПК. Это осуществляется поиском и исключением таких минимумов, которые превышают соседние (слева и (или) справа) минимумы на величину больше
- номер канала, в котором этот минимум найден, n=1…N, N - число групп. В идентичных по структуре блоках 6.2, 7.2 и 8.2 осуществляется отбраковка части выделенных в блоках 6.1, 7.1 и 8.1 минимумов - так называемых ложных минимумов, вызванных близким соседством пары сильных сигналов, и не связанных с уровнем помехи в данном ПК. Это осуществляется поиском и исключением таких минимумов, которые превышают соседние (слева и (или) справа) минимумы на величину больше  где constδ - величина, выбираемая из априорных предположений о характере анизотропии поля помех, T - время осреднения, ΔF=ƒB - ƒH - полоса обработки частот.
где constδ - величина, выбираемая из априорных предположений о характере анизотропии поля помех, T - время осреднения, ΔF=ƒB - ƒH - полоса обработки частот.
В блоках 6.3, 7.3 и 8.3 формируются 3 отдельные массива миноранты, для чего строятся ломаные линии, соединяющие точки минимумов, которые и являются искомым массивом миноранты для каждого разбиения массива U на Nq (q=1…3) непересекающихся групп, причем вычисление значений в каналах, отличных от Sn, производится путем линейной интерполяции:

В блоке 9 формируется массив обобщенной миноранты М={Mi} как минимальное значение из трех минорант, вычисленных в блоках 6, 7 и 8, т.е. для каждого ПК с номером i по  находится:
находится:  где q=1, 2, 3.
где q=1, 2, 3.
В блоке 10 производится оценка среднего и СКО шума, и выработка порога обнаружения. Для этого за оценку постоянной составляющей принимается массив увеличенной миноранты:  где ConstEX - величина, лежащая в пределах (1-1,3), оценка СКО помехи в каждом канале определяется как
где ConstEX - величина, лежащая в пределах (1-1,3), оценка СКО помехи в каждом канале определяется как  и вычисляется порог обнаружения на данном цикле обработки, равный
и вычисляется порог обнаружения на данном цикле обработки, равный  где k=Ф-1(1-РЛТ) - константа, зависящая от требуемой величины вероятности ложных тревог.
где k=Ф-1(1-РЛТ) - константа, зависящая от требуемой величины вероятности ложных тревог.
В блоке 11 принимается решение об обнаружении сигнала в i-ом пространственном канале при превышении величиной Ui порогового значения порог(i).
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств. Многоэлементные антенны шумопеленгования известны, например, из [8], при этом антенные модули могут быть выполнены согласно [9] или [10], а блок формирования веера характеристик направленности согласно [11]. Остальные блоки, в том числе вновь создаваемые, могут быть выполнены в модулях программируемых спецпроцессоров сигналов и в модулях универсальной части цифрового вычислительного комплекса [12].
Работоспособность предлагаемого способа, основанного на определении порога обнаружения в каждом ПК, иллюстрируют 2 численных примера, полученные по результатам моделирования системы обнаружения шумовых сигналов с бортовой антенной: на фиг. 2 и 3 изображен процесс формирования оценки постоянной составляющей помехи и порога обнаружения на выходе многоканальной системы обнаружения с использованием 3-х различных минорант.
В первом примере использованы следующие исходные данные: длина линейной приемной антенны ~7λср, где λср - длина волны на средней частоте, полоса обработки 1 октава,  угловое положение первого источника сигнала - минус 30° от нормали к антенне, при использовании постоянной k=3 вероятность ложных тревог не более 0,0013, вероятность правильного обнаружения равна 0,9726; угловое положение 2 источника сигнала - по нормали к антенне, вероятность его правильного обнаружения равна 0,6368.
угловое положение первого источника сигнала - минус 30° от нормали к антенне, при использовании постоянной k=3 вероятность ложных тревог не более 0,0013, вероятность правильного обнаружения равна 0,9726; угловое положение 2 источника сигнала - по нормали к антенне, вероятность его правильного обнаружения равна 0,6368.
Как видно из приведенных на фиг.2 графиков, миноранты 15 и 16 ошибочно оценивают уровень помехи в окрестностях сигналов, включая часть сигнального отклика в оценку распределенной помехи, а миноранта 17 дает завышенную оценку помехи на краю сектора обзора.
Обобщенная миноранта 18 улучшает качество оценки формы анизотропии поля помех, и характер этой кривой близок к оценке постоянной составляющей распределенной помехи на выходе многоканальной приемной системы. В результате рассчитанный в каждом канале на данном цикле обработки порог обнаружения 19 позволяет обнаружить сигналы 13 и 14, а локальные максимумы 20 и 21 процесса 12 оказываются ниже его.
Вероятность правильного обнаружения сигналов при использовании расчета порога обнаружения по предлагаемому способу равна 0,9664 для первого сигнала и 0,7019 для второго при вероятности ложной тревоги РЛТ=0,0013 (при одноактном обнаружении).
Для иллюстрации работоспособности способа обнаружения, основанного на определении порога с дополнительной отбраковкой ложных минимумов, выбрана ситуация, когда сигнальные отклики двух источников накладываются друг на друга: угловое положение 1 источника сигнала 30° от нормали к антенне при ширине сигнального отклика на уровне 0,7 приблизительно 8,6°, вероятность правильного обнаружения равна 0,9726 (при k=3 и РЛТ=0,0013), угловое положение 2 источника сигнала 40° от нормали к антенне при ширине сигнального отклика 9,7°, вероятность его правильного обнаружения равна 0,9999.
По рисункам на фиг. 3 видно, что миноранты 25, 27, 29 и построенная по ним обобщенная миноранта 31 дают завышенную оценку уровня помехи в области углов, близких к углам прихода двух сигналов, и особенно в области между ними, что приводит к увеличению порога обнаружения, и, соответственно, резкому падению вероятности правильного обнаружения сигналов - 0,0037 для первого сигнала и 0,5 - для второго. При использовании предлагаемого способа отбраковки ложных минимумов, связанных с близким соседством пары сильных сигналов, миноранты 26, 28, 30 и обобщенная миноранта 32 на фиг. 3 дают в этих областях оценку уровня помехи, близкую к реальной, а вне сигнальной области оценки постоянной составляющей помехи совпадают с 31. В результате применения процедуры отбраковки ложных минимумов вероятность правильного обнаружения обоих сигналов вырастает до 0,9999.
Таким образом, результаты моделирования демонстрируют возможность корректного оценивания уровня помехи и определения порога обнаружения в режиме реального времени в системах автоматического обнаружения с бортовой антенной, обеспечивая обнаружение сигналов с высокой вероятностью правильного обнаружения и с вероятностью ложной тревоги, не превышающей заданный уровень.
Источники информации
1. Л. Камп «Подводная акустика», пер. с англ. М., Мир, 1972, стр. 262-266.
2. Применение цифровой обработки сигналов, пер. с англ. под ред. Э. Опенгейма, М., Мир, 1980, стр. 467-468.
3. Корякин Ю.А., Смирнов С.А., Яковлев Г.Н. Корабельная гидроакустическая техника: состояние и актуальные проблемы. - СПб.: Наука. 2004, стр. 53.
4. Подгайский Ю.П., Антипов В.А., Величкин С.М., Янпольская А.А. Способ обнаружения шумящих в море объектов. Патент RU 2300118, G01S 3/80 от 16.08.2006.
5. Банк М.У. Параметры бытовой приемно-усилительной аппаратуры и методы их измерения. - М.: Радио и связь, 1982, стр. 24-33.
6. Method for increasing passive sonar operating distance by means of shallow sound field characteristics. Patent CN №104765039(B), опубликован 13.06.2017.
7. Гусев В.Г. Системы пространственно-временной обработки гидроакустической информации. - Л.: Судостроение, 1988.
8. Литвиненко СЛ. Сферическая гидроакустическая антенна. Патент РФ №2515133 от 10.05.2014. МПК G01S 15/00.
9. Смарышев М.Д., Черняховский А.Е., Иванов A.M., Шатохин А.В., Селезнев И.А., Никандров В.А., Маляров К.В., Барсуков Ю.В. Антенный модуль с цифровым выходом. Патент РФ №2539819 от 27.01.2015. МПК H04R 1/44.
10. Величкин С.М., Дудаков О.Н., Леоненок Б.И., Павлов Р.П., Попов В.П., Цыганов Н.А., Михайлов Г.А. Многоэлементный линейный модуль гидроакустической приемной антенны. Патент РФ №2269875 от 10.02.2006. МПК H04R 1/44.
11. Баскин В.В., Гришман Г.Д., Казаков М.Н., Криницкий A.M., Леоненок Б.И., Смарышев М.Д. Способ формирования частотно независимой характеристики направленности рабочим сектором многоэлементной гидроакустической приемной круговой антенны. Патент РФ №2293449 от 10.02.2007. МПК H04R 1/44, G01S 15/02.
12. Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисе А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. Патент РФ №2207620 от 10.03.2003. МПК G06F 15/16, G01S 15/88.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
Изобретение относится к гидроакустике, технической акустике и может быть использовано для построения гидроакустических систем обнаружения шумящих целей бортовыми (или иными) антеннами с существенно не идентичными характеристиками направленности пространственных каналов и/или в анизотропном поле помех. Особенностью заявленного способа обнаружения является то, что требуемые для принятия решения об обнаружении сигнала пороги вырабатываются на каждом цикле обработки в каждом канале обзора, для чего производится оценка аналога миноранты для прединдикаторных процессов смеси сигнала с шумом, по которой производится оценка среднего и среднеквадратического отклонения шума. Достигаемым техническим результатом является повышение достоверности автоматического обнаружения сигналов в системах обнаружения с бортовыми антенными решетками по совокупности сформированных пространственных каналов, характеристики которых не идентичны, но близки, без отдельного измерения помехи, что позволяет работать в режиме реального времени и без усложнения аппаратуры, в том числе при анизотропном поле помех. 2 н. и 1 з.п. ф-лы, 3 ил.
1. Способ обнаружения шумящих в море объектов бортовыми антеннами, включающий прием первичного поля шумоизлучения объектов статическим веером характеристик направленности, частотно-временную обработку в каждом пространственном канале (ПК) наблюдения, квадрирование и усреднение в полосе частот ΔF и по времени на интервале длительности Т, получение тем самым оценки энергии смеси сигнала с помехой по множеству сформированных пространственных каналов  где I - число ПК в статическом веере, и принятие решения об обнаружении путем сравнения элементов U с пороговым значением, отличающийся тем, что на каждом цикле обзора для выработки порога в каждом сформированном канале получают оценки среднего и дисперсии энергии помехи, используя для этого массив оценок энергии смеси сигнала и помехи, для чего осуществляют разбиение массива U на N непересекающихся групп, в каждой группе с номером n находят минимум Рn массива U и его местоположение Sn, находят массив миноранты Wi как массив, заполненный значениями результата кусочно-линейной интерполяции между найденными точками минимумов входной развертки, выбираемых в точках расположения исходных ПК, повторяют эти операции в количестве Q раз, где Q≥3, для разных значений N, определяют в каждом пространственном канале минимум по Q минорантам и строят по ним новый массив обобщенной миноранты
где I - число ПК в статическом веере, и принятие решения об обнаружении путем сравнения элементов U с пороговым значением, отличающийся тем, что на каждом цикле обзора для выработки порога в каждом сформированном канале получают оценки среднего и дисперсии энергии помехи, используя для этого массив оценок энергии смеси сигнала и помехи, для чего осуществляют разбиение массива U на N непересекающихся групп, в каждой группе с номером n находят минимум Рn массива U и его местоположение Sn, находят массив миноранты Wi как массив, заполненный значениями результата кусочно-линейной интерполяции между найденными точками минимумов входной развертки, выбираемых в точках расположения исходных ПК, повторяют эти операции в количестве Q раз, где Q≥3, для разных значений N, определяют в каждом пространственном канале минимум по Q минорантам и строят по ним новый массив обобщенной миноранты  формируют массив
формируют массив  умножая значения М на константу, зависящую от полосы обработки частот ΔF и времени накопления Т массива U, порог обнаружения в каждом пространственном канале рассчитывают по формуле
умножая значения М на константу, зависящую от полосы обработки частот ΔF и времени накопления Т массива U, порог обнаружения в каждом пространственном канале рассчитывают по формуле  где k=Ф-1(1-РЛТ) - константа, зависящая от требуемой величины вероятности ложных тревог, Ф-1 - обозначение функции, обратной к функции распределения гауссовского распределения
где k=Ф-1(1-РЛТ) - константа, зависящая от требуемой величины вероятности ложных тревог, Ф-1 - обозначение функции, обратной к функции распределения гауссовского распределения  а решение об обнаружении принимают, сравнивая значения Ui с порогом
а решение об обнаружении принимают, сравнивая значения Ui с порогом  в каждом пространственном канале.
в каждом пространственном канале.
2. Способ по п. 1, отличающийся тем, что для каждого массива миноранты дополнительно после нахождения всех минимумов производят проверку на наличие ложных минимумов, вызванных близким соседством пары сильных сигналов и превышающих соседние слева и (или) справа на величину, большую  где constδ - величина, выбираемая из априорных предположений о характере анизотропии поля помех, Т - время осреднения, ΔF - полоса обработки частот.
где constδ - величина, выбираемая из априорных предположений о характере анизотропии поля помех, Т - время осреднения, ΔF - полоса обработки частот.
3. Устройство обнаружения шумящих в море объектов бортовой антенной, содержащее последовательно соединенные многоэлементную акустическую приемную антенну шумопеленгования, блок предварительной обработки гидроакустической информации, блок формирования веера пространственных каналов (ПК), блок формирования прединдикаторного процесса (ПИП), блок принятия решения - пороговое устройство, отличающееся тем, что в него дополнительно введен спецпроцессор, который для трех различных разбиений множества всех ПК на непересекающиеся группы содержит три блока формирования массивов миноранты, каждый в виде ветки последовательно соединенных блоков: блока нахождения минимумов ПИП, блока отбраковки ложных минимумов и блока линейной интерполяции для формирования миноранты для всех ПК при данном разбиении на группы, при этом вход каждого блока нахождения минимумов ПИП соединен с соответствующим выходом блока формирования ПИП, также спецпроцессор содержит последовательно соединенные блок формирования обобщенной миноранты и блок оценки среднего и среднеквадратического отклонения (СКО) уровня помехи и выработки порога обнаружения в каждом пространственном канале; при этом выход каждого из блоков формирования массивов миноранты соединен с соответствующим входом блока формирования обобщенной миноранты, а выход блока оценки среднего и СКО уровня помехи и выработки порога обнаружения соединен с первым входом блока принятия решения об обнаружении - порогового устройства, второй вход которого соединен с выходом блока формирования ПИП.
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
| Способ обнаружения шумящих объектов в мелком и глубоком море | 2019 |
|
RU2702917C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2699923C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| CN 104765039 B, 13.06.2017 | |||
| CN 1246615 A, 08.03.2000. | |||

