Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования.
Известен способ обнаружения точечного источника с помощью коррелятора сигналов антенной решетки с расщепленной характеристикой направленности. При такой обработке преобразователи антенной решетки разделяются на две группы, каждой из которых вводится фазовый сдвиг и линейное взвешивание выходных сигналов преобразователей. Выходные сигналы двух групп коррелируют и результаты суммируют в отводах линии задержки, квадрируют и регистрируют в координатах пеленг - время. Одним из главных недостатков этого способа является то, что при небольших отношениях сигнал-шум на выходах обеих решеток операция умножения при вычислении корреляции изменяет некоторые пороговые характеристики системы. Операция умножения может также вызвать появление ложных боковых лепестков, которые по существу являются пространственными аналогами результатов модуляции сигналов (Применение цифровой обработки сигналов, пер. с англ. под ред. Э.Опенгейма, М., Мир, 1980 г., стр.447, 448, 451).
Этот способ обнаружения можно улучшить при использовании согласованной с распределением на апертуре антенны и изменением во времени волновой картины наблюдаемого сигнала (Подводная акустика и обработка сигналов, пер. с англ. под ред. М.Бьерне. М., Мир, 1985 г., стр.325-328 и 415-418). В этом способе обнаружение шумящих объектов определяется кривизной волнового фронта и ограничивается его искажениями. Способ сложный, требует применения сложной дорогостоящей аппаратуры для введения управляемого амплитудно-фазового распределения.
Известен способ обнаружения шумящих объектов по патенту РФ 2110810 от 26.07.95 г., в котором шумы принимают двумя половинами антенны, разнесенной в пространстве по горизонту. Однако этот способ работоспособен при обнаружении объектов не одинакового типа, при их нахождении в ближней зоне акустической освещенности и мало достоверен при нахождении их в дальней зоне акустической освещенности из-за влияния явления вертикальной рефракции звука.
Наиболее близким по технической сущности к предлагаемому способу является способ обнаружения, изложенный в монографии Л.Кампа. Подводная акустика, пер. с англ. М., Мир, 1972 г., стр.262...263, в соответствии с которым с помощью антенны и энергетического приемника сигнала можно обнаружить цель в пассивном режиме путем сравнения отношения сигнал-помеха в зоне акустической освещенности с пороговым значением.
Звуковой сигнал принимают (фактически имеется в виду прием смеси сигнала шумоизлучения и помехи) антенной, которая предполагается слабо направленной в вертикальной плоскости и не различает углы прихода сигнала в вертикальной плоскости. Широкополосный сигнал с выхода веера горизонтальных пространственных каналов приемной антенны подается на энергетический приемник с заданным временем усреднения и панорамный индикатор с самопишущим прибором или с электронно-лучевой трубкой, причем используется модуляция яркости луча. Здесь и далее использованный термин "веер пространственных каналов" является обобщающим по отношению к классическому термину "многолучевой диаграммой направленности" (см. Применение цифровой обработки сигналов, пер. с англ. под ред. Э.Опенгейма, М., Мир, 1980 г., стр.467, 468), когда совокупность характеристик направленности смежных пространственных каналов расположены веером с дискретным по углу шагом.
Каждая развертка выходов веера на одном цикле обзора воспроизводится на индикаторе как линия, модулированная по яркости. Последующие развертки на циклах обзора смещаются вниз по отношению к предыдущим. Разрешающая ячейка, регистрирующая цель в пространственном канале веера, связана с отметкой, появляющейся на одинаковом расстоянии от края индикатора для каждой развертки. При этом типе развертки, если гидроакустик ждет появления на экране, например 20 всплесков яркости в каждом цикле обзора, он может наблюдать присутствие сигналов цели в виде вертикальных линий на индикаторе при пороге, когда половина разрешающих ячеек по времени дает на индикаторе отметки шума, а отметка "сигнал плюс шум" появляется в той ячейке пространственного канала, к которой он принадлежит приблизительно три четверти общего времени всех циклов обзора (Л. Камп «Подводная акустика», пер. с англ. М., Мир, 1972 г., стр.265...266).
Этот способ обнаружения содержит следующие операции:
- прием гидроакустического шумового сигнала с помощью приемной антенны с развитой апертурой в горизонтальной плоскости, причем антенна не обеспечивает разрешения по углу прихода в вертикальной плоскости траекторий лучей,
- частотно-временную обработку принятых шумовых сигналов для каждого пространственного канала наблюдения в горизонтальной плоскости,
- измерение уровня на выходе пространственного канала веера, включая накопление во времени, центрирование и нормирование в единицах отношения сигнал - помеха,
- развертывание на последовательных циклах обзора принятых сигналов пространственных каналов веера в горизонтальной плоскости на панорамном индикаторе в координатах угол - время.
В каждое данное мгновение указанные операции обеспечивают наблюдение только в определенном секторе углов, обнаружение осуществляется сравнением уровней шума по соседним направлениям по существу при однолучевом приеме многолучевого сигнала.
Способ хорошо работает в однородной среде и в условиях, когда можно пренебречь вкладом сигналов лучей, приходящих с других направлений в вертикальной плоскости после преломления в слоисто-неоднородной среде и отражений от границ. При этом наибольшей эффективности обнаружения достигают, уменьшая ширину и изменяя угловое положение максимума характеристики направленности в вертикальной плоскости.
В реальном море в акустическом поле, неоднородном и анизотропном, алгоритм показал неудовлетварительную работу, то есть давал большое количество ложных трасс отметок шума и неустойчиво обнаруживал слабые полезные сигналы.
Способ не учитывает влияния вертикальной рефракции звука и чрезвычайно сильно зависит от гидроакустических условий наблюдения шумящих объектов в слоисто-неоднородной среде; так, в летнее время дальность действия шумопеленгатора может иногда составлять всего 1000 м. Для отстройки от шумовых помех моря ширину характеристики направленности вертикальной плоскости выбирают так, чтобы сигналы, распространяющиеся по траекториям лучей других направлений, все же попали в пределы ширины характеристики направленности вертикальной плоскости. Однако перераспределение энергии между сигналами других направлений приводит к тому, что прием сигналов осуществляют, вводя "наклон", сдвиг, поворот оси характеристики направленности в вертикальной плоскости на возможные углы прихода полезного сигнала. На практике, если разрешающая способность приемной антенной системы в вертикальной плоскости равна ±δ, то время наблюдения, соответствующее лучу, середина которого расположена под углом места θ, должно удовлетворять требованиям на нижней границе ширины луча при угле θ-δ и на верхней границе при угле θ+δ.
Можно ориентировать ось характеристики направленности антенны каждый раз при помощи компенсатора на вертикальный угол "наклона" θ, равный ширине характеристики направленности в вертикальной плоскости. Такое решение приводит к успеху в период установления акустического контакта при обнаружении сигнала и на этапе наведения канала автосопровождения. В дальнейшем использование регулируемого угла "наклона" проблематично при замираниях на короткое время или при пропадании сигнала на длительное время и восстановлении слежения при появлении сигнала вновь.
Таким образом, желательно иметь способ обнаружения шумящих объектов, который одновременно позволил бы с большей достоверностью, чем в способе прототипа, определить наличие сигнала цели и длительно поддерживать акустический контакт с целью, уменьшив время пропадания сигнала и время потери акустического контакта.
Задачей заявляемого способа является повышение достоверности обнаружения и длительного поддержания контакта с целью путем учета гидроакустических условий наблюдения шумящих объектов и более полного накопления многолучевого сигнала по углу в вертикальной плоскости.
Для решения поставленной задачи в известный способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне, включающий прием шумового сигнала в горизонтальной плоскости под различными фиксированными углами в вертикальной плоскости, в котором осуществляют частотно-временную обработку принятых шумовых сигналов лучей в каждом пространственном канале наблюдения в горизонтальной плоскости, квадрируют, усредняют по времени, центрируют и нормируют шумовые сигналы к помехе, осуществляют накопление на последовательных циклах обзора отметок принятых, нормированных шумовых сигналов и принимают решение об его обнаружении путем сравнения с пороговым значением отношения сигнал-помеха при наличии коррелирующих отметок в смежных циклах, введены новые операции, а именно:
- прием шумовых сигналов статическим вертикальным веером одновременно в нескольких направлениях вертикальной плоскости каждого пространственного канала наблюдения в составе веера горизонтальной плоскости, тем более что современная вычислительная техника позволяет это сделать,
- оптимизацию приема для каждого горизонтального пространственного канала в наклоненных по вертикали веерах путем выбора наиболее вероятных углов приема в существующих гидроакустических условиях подводного наблюдения, для чего осуществляют:
- измерение скорости звука в воде в зависимости от глубины,
- измерение волнения поверхности моря,
- вычисление в каждом вертикально наклоненном пространственном канале уровня шумового сигнала на различных расстояниях и глубинах от точки приема по измеренным данным и по известным характеристикам дна, решая уравнение гидроакустики (Справочник по гидроакустике, Л., Судостроение, 1988 г., стр.525) в пассивном режиме для шумящего объекта с заданным уровнем шумоизлучения с учетом характеристик приемной системы,
- вычисление уровня шумов моря в каждом вертикальном пространственном канале с учетом характеристик приемной системы по измеренным данным и известным характеристикам дна,
- нормирование относительно расчетных шумов моря соответствующих вертикальных пространственных каналов расчетных уровней шумовых сигналов в каждом пространственном канале, полученных для заданных расстояний до шумящего объекта и глубин, вычисление для каждого расстояния и глубины шумящего объекта в вертикальных пространственных каналах отношения сигнал-помеха,
- обработку принимаемых шумовых сигналов с весами, пропорциональными расчетному отношению сигнал-помеха в вертикальных каналах, до межциклового накопления,
- суммирование с расчетными весами принятых нормированных к помехе шумовых сигналов вертикальных пространственных каналов.
Известно, что при измерениях в море гипотеза о сферическом законе расширения фронта волны с учетом фокусировки и поглощения энергии обеспечивает приемлемое соответствие полученным данным для самых разных условий. Существующие гидроакустические условия учитываются с точностью до аномалии распространения относительно однородной безграничной среды со сферическим законом распространения с учетом поглощения.
Для определения расчетного уровня сигнала шумящего объекта в пассивном режиме в зависимости от дистанции решают уравнение гидроакустики. Оно связывает технические характеристики гидроакустической аппаратуры шумопеленгаторной станции, параметры шумящего объекта взаимодействия, характер его расположения относительно приемной антенны и границ среды и особенности распространения сигналов и шумов в океане.
УИ-ПР=УШ-ПН+ПО=УП+ПО,
где УИ - уровень источника - интенсивность шумоизлучения на акустической оси в 1 м от источника,
ПР - потери распространения - величина ослабления сигнала при распространении в морской среде между точкой, находящейся в 1 м от источника, и удаленной точкой, в которой расположен фазовый центр приемной антенны,
УП - уровень помех - интенсивность помех на выходе приемника, равная разности интенсивности шумов моря (УШ) и показателя направленности (ПН),
ПО - порог обнаружения - отношение мощности сигнала определенной формы к мощности помехи. Упомянутые расчеты могут быть проведены по алгоритмам, приведенным, например, в книге Матвиенко В.Н., Тарасюка Ю.Ф. Дальность действия гидроакустических средств, Л., Судостроение, 1981 г., стр.212-214.
По результатам вычисления уровня осуществляют оптимизацию приема путем выбора в вертикальных статических веерах пространственных каналов ярусов для каждого расстояния и глубины шумящего объекта совокупности номеров, составляющих, например, от одного до девяти вертикальных пространственных каналов с расчетным отношением сигнал-помеха в каждом выше заданной величины, например, более 0.3...0.5 порога обнаружения. Выполняют перед обнаружителем на каждом цикле обзора весовое накопление по пространству путем весового суммирования с расчетными весами принятых нормированных к помехе шумовых сигналов лучей совокупности вертикальных пространственных каналов с выбранными номерами.
Регистрируется картина совокупности принимаемых сигналов на выходе приемной системы, для которых выполнены указанные выше процедуры.
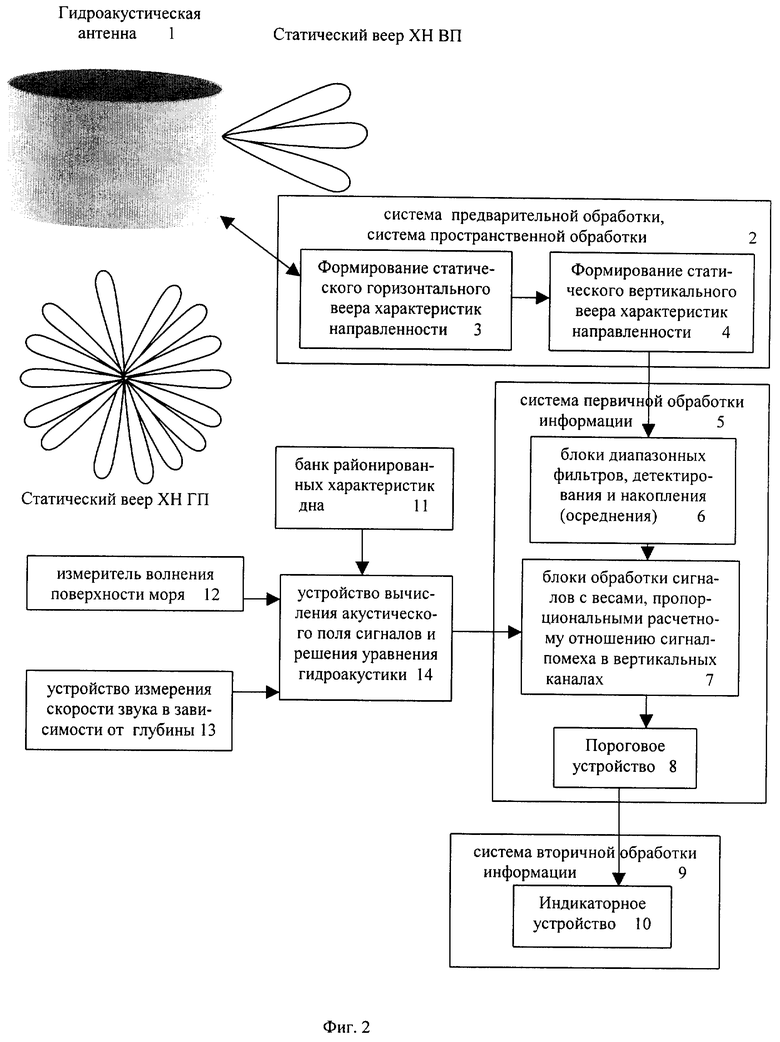
Предлагаемое изобретение иллюстрируется графическими изображениями, на которых показаны: на фиг.1 блок-схема способа обнаружения как последовательность операций, на фиг.2 блок-схема устройства, реализующего заявляемый способ.
На фиг.1 приведена блок-схема заявляемого способа как последовательность операций. Операция 1 предусматривает формирование вертикального Q и горизонтального Р статических вееров характеристик направленности и одновременный прием смеси сигнала шумоизлучения и помехи каждым из PQ пространственных каналов. Операция 2 предусматривает частотную обработку принятого сигнала каждого из PQ пространственных каналов.
Смысл операций 3, 4, 9 и 10 определяется их названиями.
Операция 5 предусматривает измерение волнения поверхности моря.
Совокупность операций 6 (6.1...6.А) реализуется путем предварительного расчета и запоминания уровней сигнала шумоизлучения в точке приема на выходах каналов вертикального веера дальностях, например, Ri=i ΔR (где ΔR - заранее выбранный шаг по дистанции, составляющий на практике 0,005...0,1 Rmax, где Rmax - максимально возможная дальность до источника шумоизлучения, i=1...N - целые числа, причем N ΔR=Rmax) и при заданных параметрах наклона спектра сигнала шумоизлучения (приведенного к расстоянию 1 м от источника) Vj, j=1...M. Рассчитываются уровни для всех сочетаний индексов i=1...N, j=1...M, чем обеспечивается выполнение операций 7 (7.1...7.А), при этом общее число уровней сигнала составляет А=N. М. Рассчитанные значения уровней (на частоте fk, где fk=k Δf, Δf - заранее выбран шаг по частоте; на практике может составлять от 50 до 100 Гц; целые числа находятся в диапазоне от kн до kв, при этом рабочий диапазон частот расположен в интервале от fkн до fkв) заносятся в долговременную (постоянную) память запоминающего устройства.
Совокупность операций 7 (7.1...7.А) реализуется путем предварительного расчета нормированных уровней сигнала шумоизлучения в точке приема на выходах каналов вертикального веера Wqk и запоминания номеров каналов ярусов, у которых отношение сигнал-помеха  больше заданного, для которых устанавливается вес Сq=Wq/Wmax, а для остальных - например, нулевой вес, Сr=0, r≠q.
больше заданного, для которых устанавливается вес Сq=Wq/Wmax, а для остальных - например, нулевой вес, Сr=0, r≠q.
Операции 8 (8.1...8.А) для уровней принятого сигнала с индексами i и j предусматривает вычисления по формуле в матричном виде  - вектор-строка весов, W={Wq} - вектор-столбец принятых сигналов.
- вектор-строка весов, W={Wq} - вектор-столбец принятых сигналов.
Операция 11 предусматривает измерение скорости звука в воде в зависимости от глубины. Операции 5 и 11 проводятся независимо от остальных операций и обеспечивают получение данных для вычислительных операций 6 и 7.
Способ обнаружения реализуется устройством - шумопеленгаторной станцией с системой пространственной обработки сигналов - УФХН (см. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. - СПб.: Наука, стр.53, рис.2.4) и устройствами измерения вертикального распределения скорости звука в воде (Справочник по гидроакустике, Л., Судостроение, 1988 г., стр.54...56), измерения волнения поверхности моря (Простаков А.Л. Электронный ключ к океану, Л., Судостроение, 1986, с.69) и хранения районированного банка характеристик дна.
Блок-схема устройства показана на фиг.2. Устройство обнаружения шумящих в море объектов фиг.2 состоит из многоэлементной, например, цилиндрической антенны 1, элементы которой соединены с системой предварительной обработки и системой пространственной обработки 2, в которую входят блоки формирования статического горизонтального 3 и статического вертикального 4 веера характеристик направленности, системой первичной обработки информации 5, в которую входят блоки 6 диапазонных фильтров, детектирования и накопления (осреднения), блоки 7 обработки сигналов с расчетными весами, пропорциональными расчетному отношению сигнал-помеха в вертикальных каналах, в которые поступают из блока 14 расчетные значения сигналов, и пороговое устройство 8, и системой вторичной обработки информации 9, в которую входит индикаторное устройство 10. В вычислительном устройстве 14 рассчитывается акустическое поле сигналов и решается уравнение гидроакустики по данным, поступающим от банка районированных характеристик дна 11, от измерителя волнения поверхности моря 12, от устройства измерения скорости звука в зависимости от глубины 13. В качестве устройства измерения скорости звука в зависимости от глубины 13 может быть применен, например, измеритель XSV ВМС США (Тарасюк Ю.Ф. Измеритель скорости звука XSV для ВМС США, Судостроение за рубежом, 1979, 4, с.90-93), измеритель волнения поверхности моря 12 (Простаков А.Л. Электронный ключ к океану, Л., Судостроение, 1986, с.69), банк районированных характеристик дна 11 (Океанографические таблицы, Л., Гидрометеоиздат, 1975 г.).
На индикаторном устройстве 10 регистрируется панорама совокупности принимаемых сигналов на выходе приемной системы, для которых выполнены указанные выше процедуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ В МЕЛКОМ И ГЛУБОКОМ МОРЕ | 2017 |
|
RU2653189C1 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования. Техническим результатом является повышение достоверности обнаружения и длительного поддержания контакта с целью. Способ включает прием первичного поля шумоизлучения объектов в горизонтальной плоскости (ГП), при котором осуществляют частотно-временную обработку принятых шумовых сигналов для каждого пространственного канала наблюдения в ГП, квадрируют, усредняют по времени, центрируют и нормируют сигналы к помехе, осуществляют накопление сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, при этом осуществляют прием шума статическим вертикальным веером одновременно в нескольких направлениях вертикальной плоскости (ВП) каждого ПКН в составе статического веера в ГП, оптимизируют прием каждым горизонтальным пространственным каналом (ПК) путем выбора наиболее вероятных углов приема в ВП для существующих гидроакустических условий подводного наблюдения, для чего измеряют волнение поверхности моря, измеряют скорость звука в воде в зависимости от глубины, рассчитывают в каждом вертикальном ПК уровень шумового сигнала в точке приема с заданными уровнями первичного поля шумоизлучения на различных расстояниях и горизонтах по измеренным данным и известным характеристикам дна, решая уравнение гидроакустики в пассивном режиме для отдельного объекта с учетом характеристик приемной системы, рассчитывают уровень шумов моря в каждом вертикальном ПК с учетом характеристик приемной системы по измеренным данным и известным характеристикам дна, нормируют относительно расчетных шумов моря в вертикальных ПК расчетные уровни сигналов в каждом ПК, полученные для заданных расстояний до расчетного шумящего объекта и горизонтов, рассчитывают для каждого расстояния и горизонта шумящего объекта в вертикальных ПК отношение сигнал-помеха, осуществляют обработку принимаемых шумов с весами, перед трассовым накоплением, и суммируют с расчетными весами. 2 ил.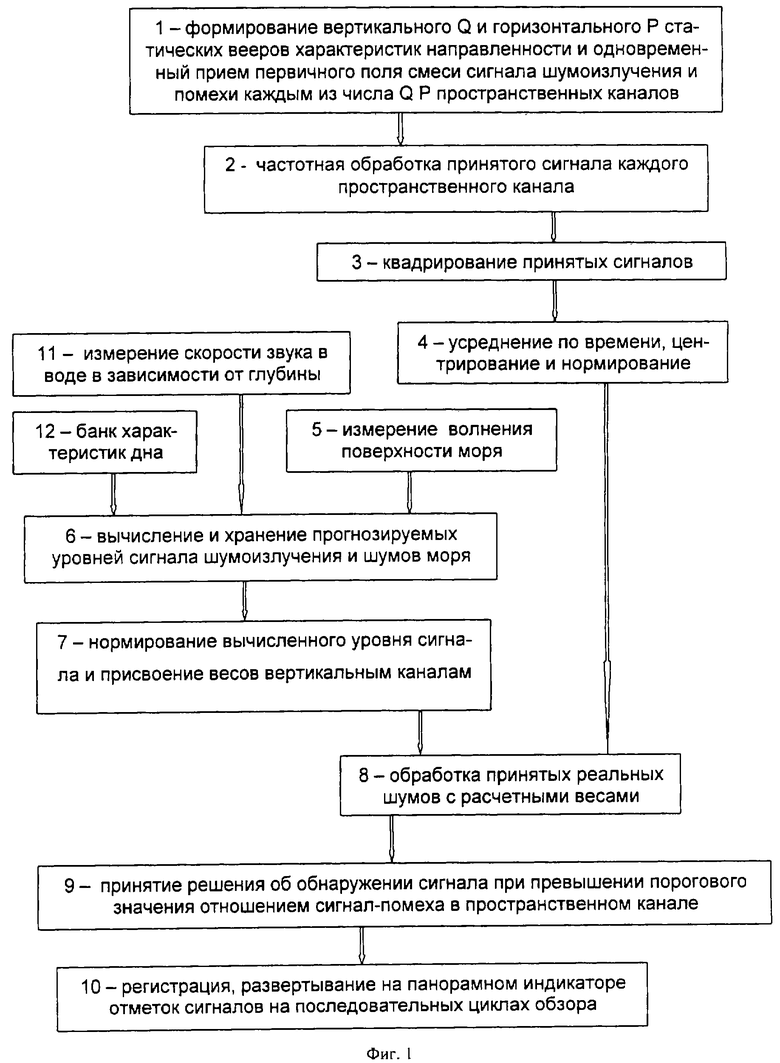
Способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне, включающий прием шумового сигнала в горизонтальной плоскости, при котором осуществляют частотно-временную обработку принятых шумовых сигналов для каждого пространственного канала наблюдения в горизонтальной плоскости, квадрируют, усредняют по времени, центрируют и нормируют шумовые сигналы к помехе, осуществляют накопление на последовательных циклах обзора принятых нормированных шумовых сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, отличающийся тем, что осуществляют прием шумового сигнала статическим вертикальным веером одновременно в нескольких направлениях вертикальной плоскости каждого пространственного канала наблюдения в составе статического веера в горизонтальной плоскости, оптимизируют прием каждым горизонтальным пространственным каналом путем выбора наиболее вероятных углов приема в вертикальной плоскости для существующих гидроакустических условий подводного наблюдения, для чего измеряют волнение поверхности моря, измеряют скорость звука в воде в зависимости от глубины, рассчитывают в каждом вертикальном пространственном канале уровень шумового сигнала на различных расстояниях и глубинах от точки приема по измеренным данным и по известным характеристикам дна, решая уравнение гидроакустики в пассивном режиме для шумящего объекта с заданным уровнем шумоизлучения с учетом характеристик приемной системы, рассчитывают уровень шумов моря в каждом вертикальном пространственном канале с учетом характеристик приемной системы по измеренным данным и известным характеристикам дна, нормируют относительно расчетных шумов моря в вертикальных пространственных каналах расчетные уровни шумовых сигналов в каждом пространственном канале, полученные для заданных расстояний до шумящего объекта и глубин, рассчитывают для каждого расстояния и глубины шумящего объекта в вертикальных пространственных каналах отношение сигнал-помеха, осуществляют обработку принимаемых шумовых сигналов с весами, пропорциональными расчетному отношению сигнал-помеха в вертикальных пространственных каналах, перед накоплением на последовательных циклах обзора, и суммируют с расчетными весами принятые нормированные к помехе шумовые сигналы вертикальных пространственных каналов.
| КАМП Л | |||
| Подводная акустика | |||
| - М.: Мир, 1972, с.262-263, 265-266 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2590032C1 |
| US 4173008 A, 30.10.1979 | |||
| JP 62002181 A, 08.01.1987 | |||
| US 4613867 A, 23.09.1986. | |||

