Заявление приоритета в соответствии с 35 U.S.C. §119
Настоящая Заявка на патент притязает на приоритет Предварительной заявки серийный номер 60/569201, озаглавленной "Transmission Mode Selection and Rate Selection for a Wireless Communication System", зарегистрированной 7 мая 2004 года и назначенной правопреемнику этой заявки, и таким образом явно содержится в данном документе по ссылке.
Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к обмену данными, и более конкретно, к выбору режима и скорости передачи в системе беспроводной связи.
Предшествующий уровень техники
Беспроводная система с несколькими входами и несколькими выходами (MIMO) использует несколько (NT) передающих антенн в передающем объекте и несколько (NR) принимающих антенн в принимающем объекте для передачи данных. MIMO-канал, сформированный NT передающими и NR принимающими антеннами, может быть разложен на NS пространственных каналов, где NS min {NT, NR}. NS пространственных каналов может быть использовано, чтобы передавать данные параллельно, чтобы достичь более высокой пропускной способности, и/или дополнительно, чтобы достичь большей надежности.
Каждый пространственный канал может сталкиваться с различными разрушительными состояниями канала, такими как, к примеру, эффекты затухания, многолучевого распространения и помех. NS пространственных каналов могут сталкиваться с различными состояниями канала и могут достигать различных соотношений "сигнал-помехи-и-шум" (SNR). SNR каждого пространственного канала определяет его пропускную способность, которая типично количественно оценивается конкретной скоростью передачи данных, которая может надежно обеспечиваться в пространственном канале. Для изменяющегося во времени MIMO-канала характеристики канала изменяются во времени, и SNR каждого пространственного канала также изменяется во времени. Различные SNR для различных пространственных каналов плюс изменяющийся во времени характер SNR для каждого пространственного канала затрудняет эффективную передачу данных в MIMO-системе.
Следовательно, в данной области техники существует потребность в методиках эффективной передачи данных в изменяющейся во времени беспроводной системе.
Сущность изобретения
В данном документе описываются методики выбора надлежащего режима передачи и одной или более надлежащих скоростей передачи данных в системе беспроводной связи (к примеру, MIMO). Согласно варианту осуществления изобретения, предусмотрен способ, в котором определяется "возраст" информации канала, доступной для использования при передаче данных посредством беспроводного канала. Режим передачи выбирается из нескольких режимов передачи на основе "возраста" информации канала. Данные передаются посредством беспроводного канала в соответствии с выбранным режимом передачи.
Согласно еще одному другому варианту осуществления, описано устройство, которое включает в себя контроллер и пространственный процессор. Контроллер определяет "возраст" информации канала, доступной для использования при передаче данных посредством беспроводного канала, и выбирает режим передачи из нескольких режимов передачи на основе "возраста" информации канала. Пространственный процессор выполняет пространственную обработку данных в соответствии с выбранным режимом передачи.
Согласно еще одному варианту осуществления, описано устройство, которое включает в себя средство определения "возраста" информации канала, доступной для использования при передаче данных посредством беспроводного канала, и средство для выбора режима передачи из нескольких режимов передачи на основе "возраста" информации канала.
Согласно еще одному другому варианту осуществления изобретения, предусмотрен способ, в котором получается информация состояния канала, указывающая качество принимаемого сигнала беспроводного канала, используемого для передачи данных. Определяется "возраст" информации состояния канала. По меньшей мере, одна скорость выбирается для передачи данных посредством беспроводного канала на основе информации состояния канала и "возраста" информации состояния канала.
Согласно еще одному другому варианту осуществления, описано устройство, которое включает в себя контроллер и процессор данных. Контроллер получает информацию состояния канала, указывающую качество принимаемого сигнала беспроводного канала, используемого для передачи данных, определяет "возраст" информации состояния канала и выбирает, по меньшей мере, одну скорость для передачи данных посредством беспроводного канала на основе информации состояния канала и "возраста" информации состояния канала. Процессор данных обрабатывает данные в соответствии с, по меньшей мере, одной скоростью, выбранной контроллером.
Согласно еще одному варианту осуществления, описано устройство, которое включает в себя средство получения информации состояния канала, указывающей качество принимаемого сигнала беспроводного канала, используемого для передачи данных, средство определения "возраста" информации состояния канала и средство выбора, по меньшей мере, одной скорости для передачи данных посредством беспроводного канала на основе информации состояния канала и "возраста" информации состояния канала.
Согласно еще одному варианту осуществления, предусмотрен способ, в котором определяется "возраст" информации канала, доступной для использования при передаче данных посредством беспроводного канала. Режим передачи выбирается из нескольких режимов передачи на основе "возраста" информации канала. Получается информация состояния канала, указывающая качество принимаемого сигнала беспроводного канала. Определяется "возраст" информации состояния канала. По меньшей мере, одна скорость выбирается для передачи данных на основе информации состояния канала и "возраста" информации состояния канала. Данные передаются посредством беспроводного канала в соответствии с режимом передачи и, по меньшей мере, одной скоростью, выбранной для передачи данных.
Далее подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Фиг.1A и 1B иллюстрирует две примерные схемы передачи пилот-сигналов (контрольных сигналов) и данных.
Фиг.2 иллюстрирует структуру кадра, которая может использоваться для MIMO-системы.
Фиг.3 иллюстрирует процесс выбора режима передачи данных.
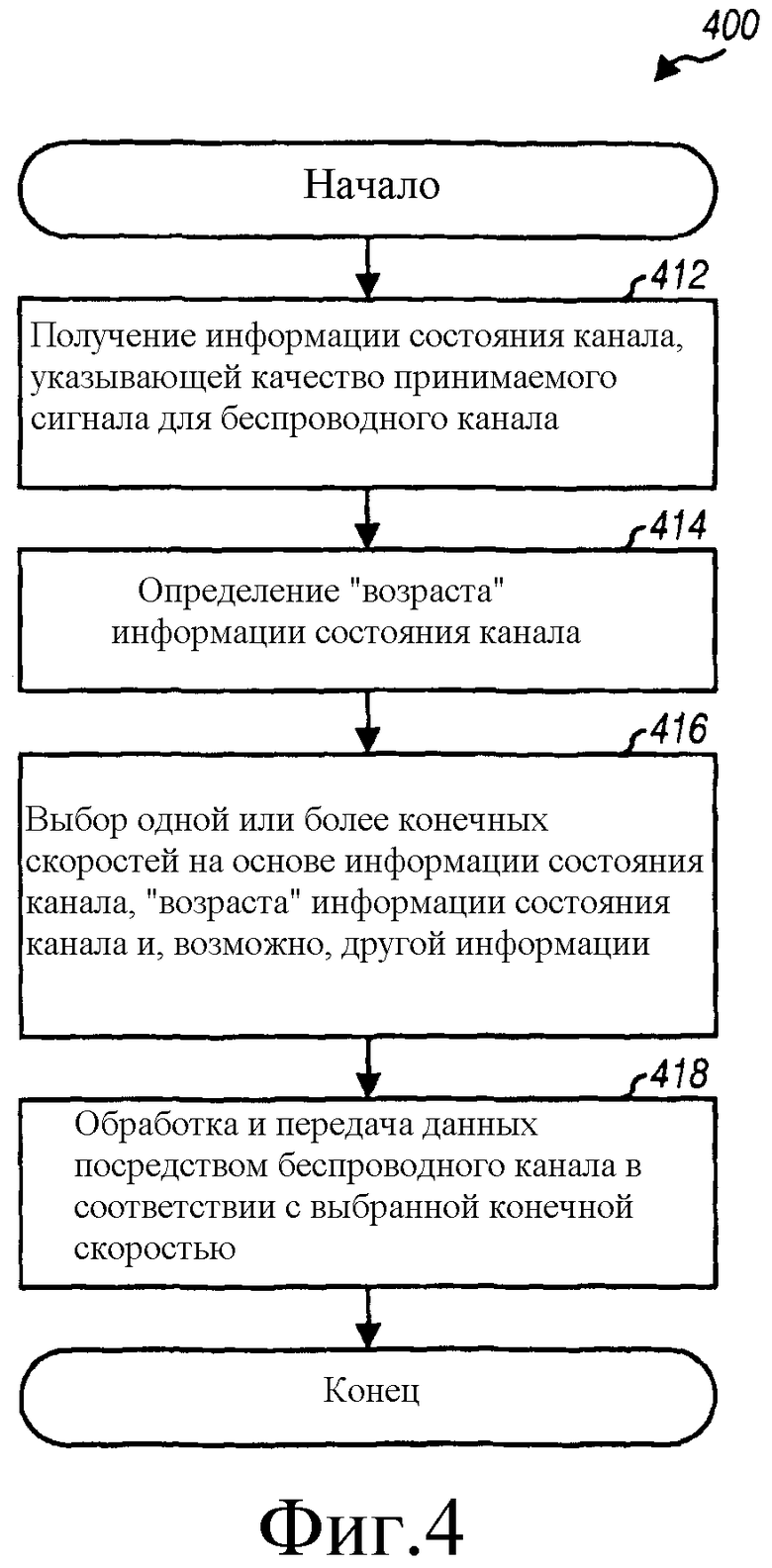
Фиг.4 иллюстрирует процесс выбора скорости(ей) передачи данных.
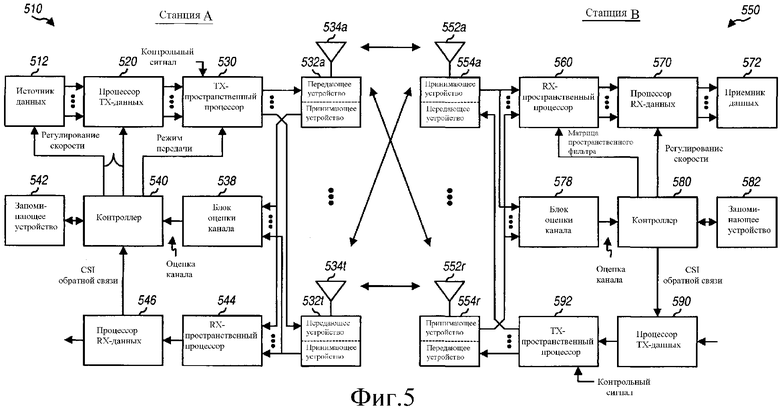
Фиг.5 иллюстрирует блок-схему станций A и B.
Подробное описание изобретения
Слово "примерный" используется в данном документе, чтобы обозначать "служащий в качестве примера, отдельного случая или иллюстрации". Любой вариант осуществления, описанный в данном документе как "примерный", необязательно должен быть истолкован как предпочтительный или выгодный по сравнению с другими вариантами осуществления.
Описанные в данном документе методики выбора режима и скорости передачи могут использоваться в различных системах беспроводной связи. Эти методики могут использоваться в системах как с одной несущей, так и с несколькими несущими. Эти методики также могут использовать в системах дуплекса с временным разделением каналов (TDD) и системах дуплекса с частотным разделением каналов (FDD). В FDD-системе нисходящей линии связи (или прямой линии связи) и восходящей линии связи (или обратной линии связи) выделяются различные частотные диапазоны, и характеристики канала одной линии связи могут не коррелировать в достаточной степени с характеристиками канала другой линии связи. В TDD-системе нисходящая и восходящая линия связи совместно используют один частотный диапазон, и обычно существует определенная степень корреляции между характеристиками канала нисходящей и восходящей линии связи. Передача контрольных сигналов, оценка канала и пространственная обработка может выполняться таким образом, чтобы использовать преимущество этой корреляции. Для простоты режим и скорость передачи описываются далее для примерной TDD MIMO-системы с одной несущей. Также для простоты станция A является передающим объектом, а станция B является принимающим объектом для передачи данных от станции A к станции B. Каждая станция может быть точкой доступа (которая также упоминается как базовая станция) или абонентским терминалом (который также упоминается как мобильная станция, абонентское оборудование, беспроводное устройство и т.д.).
Примерная MIMO-система поддерживает несколько режимов передачи для повышения производительности и большей гибкости. Каждый режим передачи позволяет выполнять пространственную обработку (если выполняет) различными способами и может требовать (а может и не требовать) информации состояния канала для пространственной обработки. В табл.1 приведены некоторые примерные режимы передачи и их краткие описания.
Управляемый режим использует информацию канала (к примеру, собственные векторы) для передачи данных по ортогональным пространственным каналам (или "собственным модам") MIMO-канала. Неуправляемый режим не требует какой-либо информации канала для передачи данных по пространственным каналам MIMO-канала.
MIMO-система может использовать пространственное кодирование с расширением спектра для неуправляемого режима, чтобы повысить производительность. При пространственном кодировании с расширением спектра станция A выполняет пространственную обработку с помощью различных матриц управления так, чтобы передача данных обнаруживала множество эффективных каналов и не "застревала" на реализации с одним каналом плохого качества в течение долгого периода времени. Следовательно, производительность не задается состоянием канала в наихудшем случае.
Каждый режим передачи имеет различные технические характеристики и требования. Управляемый режим типично позволяет достигать более высокой производительности и может использоваться в том случае, если станция A имеет достаточно информации канала для передачи данных по ортогональным пространственным каналам. Неуправляемый режим не требует информации канала, но производительность его не может достигать производительности управляемого режима. Надлежащий режим передачи может выбираться для использования в зависимости от доступной информации канала, технических характеристик станций A и B, системных требований и т.п.
В управляемом режиме данные передаются по NS собственных мод MIMO-канала, сформированного посредством NT передающих антенн в станции A и NR принимающих антенн в станции B. MIMO-канал может характеризоваться посредством матрицы H характеристик канала NRxNT, которая может быть "диагонализируема" для получения NS собственных мод MIMO-канала. Эта диагонализация может достигаться посредством выполнения либо разложения по сингулярным числам матрицы H, либо разложения по собственным значениям корреляционной матрицы H, которая равна R=HHH, где HH означает транспонирование сопряженных величин H. Разложение по сингулярным числам матрицы может быть выражено следующим образом:
где
U - это унитарная матрица NRxNR левых собственных векторов H;
Σ - это диагональная матрица NRxNT сингулярных чисел H; и
V - это унитарная матрица NTxNT правых собственных векторов H.
Унитарная матрица M характеризуется свойством MHM = I, где I - это единичная матрица. Столбцы унитарной матрицы являются ортогональными относительно друг друга. Правые собственные векторы в V могут использоваться при пространственной обработке посредством станции A для передачи данных по NS собственных мод H. Левые собственные векторы в U могут использоваться при пространственной обработке в принимающем устройстве посредством станции B для восстановления данных, передаваемых по NS собственных мод. Диагональная матрица Σ содержит неотрицательные действительные значения вдоль диагонали и нули - в остальной части. Эти диагональные записи известны как сингулярные числа H и представляют усиления передачи канала для NS собственных мод. Диагональные элементы Σ могут упорядочиваться от наибольшего к наименьшему, и столбцы V и U могут упорядочиваться соответствующим образом, как описано ниже. Разложение по сингулярным числам матрицы описано автором Gilbert Strang в "Linear Algebra and Its Applications", вторая редакция, Academic Press, 1980. Станция A выполняет пространственную обработку для управляемого режима следующим образом:
где
s - это вектор с максимум NS символами данных, которые должны отправляться по NS собственных мод; и
xs - это вектор с NT передаваемыми символами, которые должны отправляться из NT передающих антенн.
При использовании в данном документе "символ данных" - это символ модуляции данных, "контрольный символ" ("пилот-символ") - это символ модуляции контрольного сигнала (пилот-сигнала) (т.е. данные, известные заранее обеим станциям A и B), "передаваемый символ" - это символ для отправки от передающей антенны, а "принимаемый символ" - это символ, получаемый от принимающей антенны.
Принимаемые символы в станции B могут быть выражены следующим образом:
где
rs- это вектор с NR принимаемыми символами для NR принимающих антенн;
Hs eff = H · V- это эффективная матрица характеристик MIMO-канала, обнаруживаемая посредством s для управляемого режима; и
n - это вектор шума.
Для простоты пусть шумом будет аддитивный белый гауссов шум (AWGN) с вектором нулевого среднего и ковариационной матрицей φnn = σ2 noise · I, где σ2 noise - это дисперсия шума. Станция B может восстанавливать символы данных в s с помощью различных методик обработки принимающего устройства.
Станция B может выполнять полностью-CSI пространственную обработку для управляемого режима следующим образом:
где
ss fcsi- это вектор с максимум NS "обнаруженных" символов данных, которые являются оценками максимум NS символов данных в s; и
nfcsi- это шум после пространственной обработки принимающего устройства.
Альтернативно, станция B может выполнять пространственную обработку по методике минимальной среднеквадратической ошибки (MMSE) следующим образом:
где
Ms mmse = [Hs eff H · Hs eff + σ2 noise · I]-1 · Hs eff H - это матрица пространственного MMSE-фильтра;
Qs mmse = Ms mmse · Hs eff;
Ds mmse = [diag [Qs mmse]]-1 - это диагональная матрица; и
ns mmse- это MMSE-фильтрованный шум для управляемого режима.
Матрица пространственного фильтра Ms mmseминимизирует среднеквадратическую ошибку между оценками символов из пространственного фильтра и символами данных в s. Оценки символов из пространственного фильтра являются ненормализованными оценками символов данных. Умножение с матрицей масштабирования Ds mmse предоставляет нормализованные оценки символов данных.
Для неуправляемого режима с пространственным кодированием с расширением спектра станция A выполняет пространственную обработку следующим образом:
где
Vss - это матрица управления NTxNT для пространственного кодирования с расширением спектра; и
xu - это вектор с NT передаваемыми символами для неуправляемого режима.
При пространственном кодировании с расширением спектра каждый символ данных в s пространственно кодируется с расширением спектра с помощью соответствующего столбца Vss. Матрица Vss типично изменяется по времени и/или частоте, но известна обеим станциям A и B. Каждый передаваемый символ в xu включает в себя компонент каждого из NS символов данных в s.
Принимаемые символы в станции B для неуправляемого режима могут быть выражены следующим образом:
где
ru - это вектор с NR принимаемыми символами для NR принимающих антенн; и
Hu eff = H · Vss- это эффективная матрица характеристик MIMO-канала, обнаруживаемая посредством s для неуправляемого режима с пространственным кодированием с расширением спектра.
Станция B может выполнять пространственную обработку по методике обращения корреляционной матрицы канала (CCMI), которая также зачастую упоминается как форсирование нуля, следующим образом:
где
Mu ccmi = [Hu eff H · Hu eff]-1 · Hu eff H - это матрица пространственного CCMI-фильтра; и
nu ccmi- это CCMI-фильтрованный шум для неуправляемого режима.
Альтернативно, станция B может выполнять пространственную обработку MMSE следующим образом:
где
Mu mmse = [Hu eff H·Hu eff + σ2 noise·I]-1Hu eff H - это матрица пространственного MMSE-фильтра;
Qu mmse = Mu mmse·Hu eff;
Du mmse = [diag [Qu mmse]]-1; и
nu mmse- это MMSE-фильтрованный шум для неуправляемого режима.
Как показано в уравнениях (5) и (8), станция B может выполнять пространственную обработку MMSE в управляемом и неуправляемом режиме. Тем не менее, для управляемого и неуправляемого режима используются различные матрицы Hs eff и Hu eff, соответственно.
Если пространственное кодирование с расширением спектра не используется в неуправляемом режиме, то вектор передачи может быть выражен следующим образом: xu = s. Станция B может восстанавливать символы данных в s с помощью пространственной обработки принимающего устройства CCMI или MMSE. Тем не менее, матрица пространственного фильтра должна выводиться на основе H вместо Hu eff.
Станция A выполняет пространственную обработку с помощью V для управляемого режима. Станция B выполняет пространственно согласованную фильтрацию с помощью U (или с помощью H и V) для управляемого режима и с помощью H и Vss для неуправляемого режима. Оценка H может быть получена одной станцией на основе "неуправляемого MIMO"-контрольного сигнала, отправленного другой станцией. Неуправляемый MIMO-контрольный сигнал - это контрольный сигнал, состоящий из N передач контрольных сигналов, отправляемых из N передающих антенн, где передача контрольного сигнала от каждой передающей антенны идентифицируется принимающим объектом, N = NT, если неуправляемый MIMO-контрольный сигнал отправляется станцией A, и N = NR, если неуправляемый MIMO-контрольный сигнал отправляется станцией B. Это может быть выполнено, например, посредством использования различных ортогональных последовательностей для передачи контрольных сигналов из каждой передающей антенны и/или отправки передачи контрольных сигналов для каждой передающей антенны по отдельному частотному поддиапапазону. Неуправляемый MIMO-контрольный сигнал может быть выражен следующим образом:

где
 - это контрольный символ, который должен быть передан в периоде символа i;
- это контрольный символ, который должен быть передан в периоде символа i;
 - это вектор с N элементарными сигналами для N передающих антенн в периоде символа i; и
- это вектор с N элементарными сигналами для N передающих антенн в периоде символа i; и
 - это вектор передачи для неуправляемого MIMO-контрольного сигнала в периоде символа i.
- это вектор передачи для неуправляемого MIMO-контрольного сигнала в периоде символа i.
Например, если N = 4, то четыре вектора Уолша w(0) = [1 1 1 1]T, w(1) = [1 -1 1 -1]T, w(2) = [1 1 -1 -1]T и w(3) = [1 -1 -1 1]T могут использоваться для четырех периодов символа, где "T" обозначает транспонирование. Полный неуправляемый MIMO-контрольный сигнал может отправляться в N (последовательных или непоследовательных) периодах символа или в одном периоде символа для каждого элементарного сигнала ортогональной последовательности. После приема полного неуправляемого MIMO-контрольного сигнала принимающий объект может выполнять дополнительную обработку с принятым контрольным сигналом для оценки H. Для простоты далее предполагается отсутствие ошибок в оценке канала.
В TDD-системе может быть сделано допущение, что характеристики канала нисходящей и восходящей линии связи являются обратными друг другу. Т.е. если H представляет матрицу характеристик канала от антенной решетки X до антенной решетки Y, то взаимный канал предполагает, что соединение от матрицы Y к матрице X задается посредством HT. Тем не менее, характеристики цепей передачи и приема в станции A типично отличаются от характеристик цепей передачи и приема в станции B. Можно выполнить калибровку для получения матриц корректировки, которые могут учитывать разницу характеристик цепей передачи и приема двух станций. Применение матриц корректировки в этих двух станциях позволяет выразить характеристику калиброванного канала одной линии связи как транспонирование характеристики калиброванного канала другой линии связи. Для простоты далее в описании предполагается плоская частотная характеристика каналов приема и передачи, Hab = H - это матица характеристик канала для линии связи от станции A к станции B, а Hba = HT - это матрица характеристик канала для линии связи от станции B к станции A.
Разложение по сингулярным числам матриц Hab и Hbaможет быть выражено следующим образом:
где V* - это комплексно-сопряженная матрица от V. Как показано в уравнении (11), U и V - это матрицы левых и правых собственных векторов Hab, а V* и U* - это матрицы левых и правых собственных векторов Hba. Станции A и B могут использовать матрицы V и U*, соответственно, для пространственной обработки с целью передачи данных в управляемом режиме.
Вследствие взаимного канала одна станция может выполнять разложение по сингулярным числам матрицы для получения V или U*. Затем эта станция может передавать "управляемый MIMO-контрольный сигнал", который является контрольным сигналом, отправляемым по собственным модам MIMO-канала. После этого другая станция может оценивать матрицу собственных векторов на основе управляемого MIMO-контрольного сигнала.
Станция A может передавать управляемый MIMO-контрольный сигнал следующим образом:
где
vm - это m-ный собственный вектор/столбец V;
pm- это контрольный символ, который должен передаваться по m-ной собственной моде Hab; и
xs pilot,m- это вектор передачи управляемого MIMO-контрольного сигнала для m-ной собственной моды.
Принимаемый управляемый MIMO-контрольный сигнал в станции B может быть выражен следующим образом:
где rs pilot,m- это принимаемый вектор управляемого MIMO-контрольного сигнала для m-ной собственной моды;
σm- это m-ный диагональный элемент Σ; и
um - это m-ный собственный вектор/столбец U.
Уравнение (13) показывает, что станция B может получить оценку U, по одному столбцу за раз, на основе управляемого MIMO-контрольного сигнала, отправляемого станцией A. Станция A может отправить полный управляемый MIMO-контрольный сигнал по всем NS собственным модам в одном или более (последовательных или непоследовательных) периодах символов. Станция B также может передать управляемый MIMO-контрольный сигнал станции A аналогичным образом с помощью столбцов U*.
Контрольные сигналы и данные могут передаваться различными способами в MIMO-системе. В управляемом режиме станция A использует информацию канала (или информацию "собственного управления") для передачи данных по собственным модам MIMO-канала. Информация канала может быть в форме H (которая может быть получена из неуправляемого MIMO-контрольного канала, отправленного станцией B) или в форме U или V (которая может быть получена из неуправляемого MIMO-контрольного канала, отправленного станцией B). Станция B также использует информацию канала (к примеру, H, U или V для управляемого режима и H для неуправляемого режима) для восстановления передачи данных от станции A. В обоих режимах станция B может оценивать принимаемые SNR пространственных каналов, определять скорости, поддерживаемые принимаемыми SNR, и отправлять либо принимаемые SNR, либо поддерживаемые скорости к станции A. Затем станция A может выбирать надлежащий режим передачи и надлежащие скорости передачи данных станции B на основе принимаемой информации обратной связи и, возможно, другой информации. Для понятности скорости, выбираемые станцией B, упоминаются как начальные скорости, а скорости, выбираемые станцией A, упоминаются как конечные скорости. Также для простоты в последующем описании предполагается, что станция B отправляет информацию скорости (вместо информации SNR) обратно стации A.
Фиг.1A иллюстрирует примерную схему 100 передачи контрольных сигналов и данных в MIMO-системе. Сначала станция A передает неуправляемый MIMO-контрольный сигнал (этап 112). Станция B принимает и обрабатывает неуправляемый MIMO-контрольный сигнал и получает оценку матрицы характеристик канала H (этап 114). Станция B также оценивает принимаемые SNR пространственных (ортогональных или неортогональных) каналов MIMO-канала на основе принимаемого контрольного сигнала (этап 116). Станция B также определяет либо начальную скорость для каждой собственной моды (для управляемого режима), либо одну начальную скорость для MIMO-канала (для неуправляемого режима) на основе принимаемых SNR (также этап 116). Начальные скорости применяются для передачи данных от станции A к станции B.
Станция B передает либо неуправляемый MIMO-контрольный сигнал, либо управляемый MIMO-контрольный сигнал с помощью собственных векторов, выведенных из H (этап 118). Станция A принимает и обрабатывает управляемый или неуправляемый MIMO-контрольный сигнал для получения оценки канала для линии связи от станции A к станции B (этап 120). Станция B также отправляет начальные скорости станции A (этап 122). Станция A принимает начальные скорости и определяет режим передачи и конечные скорости для использования при передаче данных к станции B, как описано ниже (этап 124). После этого станция A передает данные станции B с помощью выбранного режима передачи и конечных скоростей (этап 126). Станция B принимает и обрабатывает передачу данных от станции A (этап 128).
Фиг.1B иллюстрирует другую примерную схему 102 передачи контрольных сигналов и данных в MIMO-системе. Сначала станция B передает неуправляемый MIMO-контрольный сигнал (этап 112). Станция A принимает и обрабатывает неуправляемый MIMO-контрольный сигнал и получает оценку матрицы характеристик канала H (этап 114). Далее станция A передает либо неуправляемый MIMO-контрольный сигнал, либо управляемый MIMO-контрольный сигнал с помощью собственных векторов, выведенных из H (этап 118). Станция B принимает и обрабатывает управляемый или неуправляемый MIMO-контрольный сигнал для получения оценки канала для линии связи от станции A к станции B (этап 120). Оставшаяся обработка на этапах 116, 122, 124, 126 и 128 - такая же, как описанные выше для фиг.1A.
Как показано на фиг.1A и 1B, контрольные сигналы могут передаваться различными способами, чтобы станции A и B могли получать оценку канала для линии связи от станции A к станции B. Обе станции могут передавать неуправляемый MIMO-контрольный сигнал. Альтернативно, одна станция может передавать неуправляемый MIMO-контрольный сигнал, а другая станция может передавать управляемый MIMO-контрольный сигнал. В этом случае станция A или B может передавать неуправляемый MIMO-контрольный сигнал так, как показано на фиг.1A и 1B.
Фиг.2 иллюстрирует примерную структуру 200 кадра, которая может использоваться для MIMO-системы. Передача данных осуществляется в кадрах, при этом каждый кадр охватывает конкретный период времени (к примеру, 2 мс). Каждый кадр может разбиваться на (1) фазы нисходящей линии связи, в ходе которой данные и контрольные сигналы могут отправляться по нисходящей линии связи, и (2) фазу восходящей линии связи, в ходе которой данные и контрольные сигналы могут отправляться по восходящей линии связи. Для каждого кадра MIMO-контрольный сигнал может отправляться или не отправляться по нисходящей линии связи и MIMO-контрольный сигнал может отправляться или не отправляться по восходящей линии связи.
Станция B может оценивать принимаемые SNR пространственных каналов на основе управляемого или неуправляемого MIMO-контрольного сигнала, принимаемого от станции A. Принимаемый SNR зависит от пространственной обработки, выполняемой станциями A и B.
Для управляемого режима с полностью-CSI пространственной обработкой принимающего устройства SNR каждой собственной моды может быть выражен следующим образом:

где
Pm(n) - это мощность передачи, используемая для m-ной собственной моды в кадре n;
σm- это m-ный диагональный элемент Σ(n) для кадра n; и
SNRfcsi,m(n) - это SNR m-ной собственной моды в кадре n.
NS собственных мод позволяют получать различные SNR. Следовательно, различные скорости могут использоваться для потоков данных, отправляемых по этим собственным модам.
Для управляемого и неуправляемого режима с пространственной обработкой принимающего устройства MMSE SNR каждого пространственного канала может быть выражен следующим образом:
 для i = 1 ... NS, уравнение (15)
для i = 1 ... NS, уравнение (15)
где
qm(n) - это m-ный диагональный элемент Qs mmseили Qu mmse для кадра n; и
SNRmmse,m(n) - это SNR m-го пространственного канала в кадре n.
Для неуправляемого режима с пространственной обработкой принимающего устройства CCMI SNR каждого пространственного канала может быть выражен следующим образом:
 для i = 1 ... NS, уравнение (16)
для i = 1 ... NS, уравнение (16)
где
rm(n)- это m-ный диагональный элемент [Ru eff]-1 и Ru eff = Hu eff H·Hu eff для кадра n; и
SNRccmi,m(n) - это SNR m-ного пространственного канала в кадре n.
В вышеприведенных уравнениях величина Pm(n)/σ2 noise- это SNR (в единице линейных измерений) до пространственной обработки в принимающем устройстве. Величины SNRfcsi,m(n), SNRmmse,m(n) и SNRccmi,m(n) - это SNR (в децибелах, дБ) после пространственной обработки в принимающем устройстве, и они также упоминаются как принимаемые SNR. В последующем описании SNR относится к принимаемому SNR, если не указано иное.
Для неуправляемого режима с пространственным кодированием с расширением спектра NS пространственных каналов достигают аналогичных SNR благодаря пространственному кодированию с расширением спектра с помощью матрицы Vss. Следовательно, одинаковая скорость может использоваться для всех потоков данных, отправляемых по этим пространственным каналам. С помощью пространственного кодирования с расширением спектра каждый символ данных передается по всем NS пространственным каналам и соблюдается средний SNR для всех пространственных каналов, который может быть выражен следующим образом:
 уравнение (17)
уравнение (17)
 , уравнение (18)
, уравнение (18)
Усреднение SNR может выполняться в единице линейных измерений, как показано в уравнениях (17) и (18), или в дБ.
Для управляемого режима станция B может определить начальную скорость для каждой собственной моды на основе своего SNRm(n), который может быть равен SNRfcsi,m(n), вычисленному так, как показано в уравнении (14), или равен SNRmmse,m(n), вычисленному так, как показано в уравнении (15). MIMO-система может поддерживать набор скоростей, и каждая скорость может быть ассоциативно связана с конкретной скоростью передачи данных, конкретной схемой кодирования, конкретной схемой модуляции и конкретным минимальным SNR, необходимым для достижения указанного требуемого уровня производительности (к примеру, 1% частоты ошибок по пакетам). Требуемый SNR для каждой ненулевой скорости может быть получен посредством моделирования на вычислительных машинах, эмпирических измерений и т.д. Набор поддерживаемых скоростей и их требуемые SNR могут храниться в таблице соответствия. SNRm(n) для каждой собственной моды может предоставляться в таблицу соответствия, которая затем возвращает скорость Rm(n), поддерживаемую этим SNR. Скорость Rm(n) ассоциативно связывается с наибольшей скоростью передачи данных и требуемым SNR, который меньше или равен SNRm(n), или SNRreq(Rm(n))SNRm(n).
Для неуправляемого режима станция B может определить начальную скорость для MIMO-канала на основе своего SNR(n), который может быть равен SNRmmse(n), вычисленному так, как показано в уравнении (17), или равен SNRccmi(n), вычисленному так, как показано в уравнении (18). SNR(n) может быть предоставлен в таблицу соответствия, которая затем возвращает скорость R(n), поддерживаемую MIMO-каналом в неуправляемом режиме для этого SNR. Одинаковые или различные таблицы соответствия могут использоваться для управляемого и неуправляемого режима.
Станция B может выполнять начальное определение режима и скорости передачи для использования при передаче данных от станции A к станции B. Станция A может сделать окончательное определение режима и скорости передачи для использования при этой передаче данных на основе информации обратной связи, принимаемой от станции B, и другой значимой информации.
Станция A может выбрать, какой режим передачи использовать для передачи данных, на основе времени существования ("возраста") информации канала, доступной в текущем кадре, и возможно, другой информации, касающейся MIMO-канала. Характеристики MIMO-канала могут изменяться во времени вследствие ряда факторов, например, затухания, многолучевого распространения и помех. Для варьирующейся во времени системы точность и надежность информации канала снижается со временем. При использовании неточной или ненадежной информации канала для передачи данных можно получить неоптимальную производительность. Поскольку информация канала извлекается из MIMO-контрольного сигнала, "возраст" информации канала может определяться на основе "возраста" MIMO-контрольного сигнала, используемого для извлечения информации канала. "Возраст" MIMO-контрольного сигнала может определяться так, как описано ниже.
MIMO-контрольный сигнал может передаваться в каждом кадре или периодически через каждые несколько кадров, или нерегулярно. Станция A может выводить оценку H на основе неуправляемого MIMO-контрольного сигнала, принимаемого от станции B, и может разлагать H для получения матрицы V собственных векторов, используемой при передаче данных по собственным модам MIMO-канала. Станция A также может получить собственные векторы непосредственно из управляемого MIMO-контрольного сигнала, принимаемого от станции B. Тем не менее, этот управляемый MIMO-контрольный сигнал передается станцией B с помощью собственных векторов в U, которые выводятся из оценки H, полученной станцией B из неуправляемого MIMO-контрольного сигнала, отправленного станцией A. Таким образом, собственные векторы V, получаемые станцией A из управляемого MIMO-контрольного сигнала, отправляемого станцией B, по сути, выводятся из неуправляемого MIMO-контрольного сигнала, отправляемого станцией A. Качество собственных векторов в V, выведенных из управляемого MIMO-контрольного сигнала, принимаемого от станции B, таким образом, зависит от (и оптимально исключительно в зависимости от) качества соответствующего неуправляемого MIMO-контрольного сигнала, отправляемого станцией A, из которого извлекаются H и U.
Станция A может отслеживать то, когда MIMO-контрольные сигналы передаются и принимаются от станции B. Например, станция A может фиксировать (1) время, когда передается каждый неуправляемый MIMO-контрольный сигнал, (2) время, когда передается каждый управляемый MIMO-контрольный сигнал, (3) когда принимается каждый неуправляемый MIMO-контрольный сигнал, и (4) время, когда принимается каждый управляемый MIMO-контрольный сигнал. Эта запись может храниться в различных форматах. Например, запись может содержать, для каждого кадра n, четыре записи для упомянутых четырех событий MIMO-контрольных сигналов. Если MIMO-контрольный сигнал не передан или не принят в данном кадре n, то запись времени по этому MIMO-контрольному сигналу для предыдущего кадра n-1 может быть скопирована и сохранена для кадра n. С помощью этого формата записи в любом данном кадре n станция A может легко определить (1) время, когда передан последний (самый недавний) неуправляемый MIMO-контрольный сигнал, который обозначается  ,(2) время, когда передан последний управляемый MIMO-контрольный сигнал, который обозначается
,(2) время, когда передан последний управляемый MIMO-контрольный сигнал, который обозначается  , (3) время, когда принят последний неуправляемый MIMO-контрольный сигнал, который обозначается
, (3) время, когда принят последний неуправляемый MIMO-контрольный сигнал, который обозначается  , и (4) время, когда принят последний управляемый MIMO-контрольный сигнал, который обозначается
, и (4) время, когда принят последний управляемый MIMO-контрольный сигнал, который обозначается  .Станция A может использовать эту информацию для определения "возраста" и качества доступной в данный момент информации канала.
.Станция A может использовать эту информацию для определения "возраста" и качества доступной в данный момент информации канала.
Табл. 2 содержит список переменных, используемых в описании ниже.

 получен станцией A.
получен станцией A.
Станция A может определить "возраст" информации канала, доступной в текущем кадре n (или "текущей информации канала") следующим образом. Если текущая информация канала извлекается из неуправляемого MIMO-контрольного сигнала, принимаемого от станции B, то "возраст" этой информации равен "возрасту" неуправляемого MIMO-контрольного сигнала. Тем не менее, возникает задержка du pilotна обработку неуправляемого MIMO-контрольного сигнала, чтобы получить информацию канала, или, эквивалентно, информация канала доступна через d u pilot секунд после приема неуправляемого MIMO-контрольного сигнала. Таким образом, последний неуправляемый MIMO-контрольный сигнал, который мог использоваться для извлечения текущей информации канала, принят, по меньшей мере, d u pilot секундназад и может быть определен следующим образом:
 , уравнение (19)
, уравнение (19)
Если последний неуправляемый MIMO-контрольный сигнал для текущего кадра n принят, по меньшей мере,  секунд назад, то этот неуправляемый MIMO-контрольный сигнал использовался для извлечения текущей информации состояния канала. Тем не менее, если последний неуправляемый MIMO-контрольный сигнал для текущего кадра n принят менее чем секунд назад, то этот неуправляемый MIMO-контрольный сигнал не использовался для извлечения текущей информации состояния канала. Уравнение (19) определяет самый последний кадр i, в котором мог использоваться последний неуправляемый MIMO-контрольный сигнал этого кадра i с целью извлечения текущей информации канала. "Возраст" текущей информации канала, полученной из неуправляемого MIMO-контрольного сигнала, затем может быть выражен следующим образом:
секунд назад, то этот неуправляемый MIMO-контрольный сигнал использовался для извлечения текущей информации состояния канала. Тем не менее, если последний неуправляемый MIMO-контрольный сигнал для текущего кадра n принят менее чем секунд назад, то этот неуправляемый MIMO-контрольный сигнал не использовался для извлечения текущей информации состояния канала. Уравнение (19) определяет самый последний кадр i, в котором мог использоваться последний неуправляемый MIMO-контрольный сигнал этого кадра i с целью извлечения текущей информации канала. "Возраст" текущей информации канала, полученной из неуправляемого MIMO-контрольного сигнала, затем может быть выражен следующим образом:
 уравнение (20)
уравнение (20)
где
i - это индекс кадра, определенный посредством уравнения (19); и
Ageu = -, если неуправляемый MIMO-контрольный сигнал не принят.
Если текущая информация канала получается из управляемого MIMO-контрольного сигнала, принимаемого от станции B, то "возраст" этой информации равен "возрасту" соответствующего неуправляемого MIMO-контрольного сигнала, из которого получен управляемый MIMO-контрольный сигнал. Возникает задержка  на обработку станцией A управляемого MIMO-контрольного сигнала, принимаемого от станции B, и возникает задержка
на обработку станцией A управляемого MIMO-контрольного сигнала, принимаемого от станции B, и возникает задержка  на обработку станцией B соответствующего неуправляемого MIMO-контрольного сигнала, отправляемого станцией A. Таким образом, последний неуправляемый MIMO-контрольный сигнал, который мог использоваться для получения текущей информации канала, принят, по меньшей мере,
на обработку станцией B соответствующего неуправляемого MIMO-контрольного сигнала, отправляемого станцией A. Таким образом, последний неуправляемый MIMO-контрольный сигнал, который мог использоваться для получения текущей информации канала, принят, по меньшей мере,  назад и может быть определен следующим образом:
назад и может быть определен следующим образом:

Уравнение (21) определяет самый последний кадр j, в котором мог использоваться последний неуправляемый MIMO-контрольный сигнал этого кадра j с целью получения текущей информации канала. "Возраст" текущей информации канала, полученной из управляемого MIMO-контрольного сигнала, затем может быть выражен следующим образом:
 уравнение (22)
уравнение (22)
где
j - это индекс кадра, определенный посредством уравнения (21); и
Ages = -, если управляемый MIMO-контрольный сигнал не принят.
"Возраст" текущей информации канала, Agech_inf(n), далее может быть выражен следующим образом:
После этого может быть выбран режим передачи на основе "возраста" текущей информации канала следующим образом:
 Режим передачи также можно выбирать на основе другой значимой информации. Например, может учитываться меняющийся во времени характер MIMO-канала. Если MIMO-канал является относительно статичным (к примеру, для стационарных станций A и B), то информация канала может быть относительно точной и достоверной в течение большего периода времени. Наоборот, если MIMO-канал изменяется достаточно быстро (к примеру, для мобильных станций A и B), то информация канала может быть точной в течение меньшего периода времени. Изменяющийся во времени характер MIMO-канала может рассматриваться при вычислении "возраста" информации канала и порога "возраста" Thsteer age. Например, Ageu и Ages может быть функцией от типа канала (к примеру, с быстрым или медленным затуханием), различные пороги "возраста" могут использоваться для различных типов каналов, и т.д.
Режим передачи также можно выбирать на основе другой значимой информации. Например, может учитываться меняющийся во времени характер MIMO-канала. Если MIMO-канал является относительно статичным (к примеру, для стационарных станций A и B), то информация канала может быть относительно точной и достоверной в течение большего периода времени. Наоборот, если MIMO-канал изменяется достаточно быстро (к примеру, для мобильных станций A и B), то информация канала может быть точной в течение меньшего периода времени. Изменяющийся во времени характер MIMO-канала может рассматриваться при вычислении "возраста" информации канала и порога "возраста" Thsteer age. Например, Ageu и Ages может быть функцией от типа канала (к примеру, с быстрым или медленным затуханием), различные пороги "возраста" могут использоваться для различных типов каналов, и т.д.
Станция A может выбирать конечные скорости передачи данных в станцию B на основе "возраста" базового MIMO-контрольного сигнала, используемого для извлечения начальных скоростей. Фактические скорости, поддерживаемые линией связи от станции A к B, зависят от принимаемых SNR в станции B, которые могут быть оценены на основе либо управляемого MIMO-контрольного сигнала, либо неуправляемого MIMO-контрольного сигнала, принимаемого от станции A. Принимаемые SNR могут преобразовываться в начальные скорости, которые могут отправляться обратно в станцию A. Станция A может оценить принимаемые SNR в станции B на основе начальных скоростей, полученных от станции B. Например, станция A может предоставить каждую начальную скорость обратной таблице соответствия, которая затем может предоставить требуемый SNR для начальной скорости. Набор SNR, доступных станции A в текущем кадре n (или "текущая информация SNR"), обозначается как SNR(A ← B,n) и получается в момент времени tsnr(A ← B,n).
Возникает задержка dsnr(1) на обработку станцией B управляемого или неуправляемого MIMO-контрольного сигнала для оценки принимаемых SNR, выведение начальных скоростей и отправку начальных скоростей обратно станции A и (2) на обработку станцией A начальных скоростей для получения текущей информации SNR. Таким образом, последний MIMO-контрольный сигнал, который мог использоваться для получения текущей информации SNR, отправлен станцией A, по меньшей мере, dsnrсекундназад и может быть определен следующим образом:

Уравнение (25) определяет самый последний кадр k, в котором мог использоваться последний управляемый или неуправляемый MIMO-контрольный сигнал этого кадра k с целью получения текущей информации SNR. "Возраст" текущей информации SNR далее может быть выражен следующим образом:

где
k - это индекс кадра, определенный посредством уравнения (25).
Конечные скорости могут выбираться на основе текущей информации SNR, "возраста" информации SNR и, возможно, другой информации. Например, если "возраст" текущей информации SNR превышает порог "возраста" SNR (или Agesnr_inf(n) >Thsnr age), то информацию SNR можно считать слишком старой и не принимать во внимание. В этом случае наиболее надежный режим передачи и минимальная скорость (к примеру, минимальная скорость в неуправляемом режиме) может использоваться для передачи данных станции B. Если "возраст" текущей информации SNR меньше порога "возраста" SNR, то SNR, полученные станцией A, могут корректироваться на основе "возраста" информации SNR, и скорректированные SNR затем могут использоваться для выбора конечных скоростей. Корректировка SNR может выполняться различными способами.
Если для использования выбран управляемый режим, то станция A может принимать начальную скорость для каждой собственной моды m, определять требуемый SNR для каждой собственной моды на основе начальной скорости для этой собственной моды и корректировать требуемый SNR для каждой собственной моды на основе "возраста" информации SNR. Например, откат SNR, SNRage_bo(n), может быть рассчитан на основе линейной функции "возраста" следующим образом:
 уравнение (27)
уравнение (27)
где
SNRadj_rate- это частота корректировки SNR (к примеру, SNRadj_rate = 50 дБ/с).
Затем откорректированный SNR для каждой собственной моды может быть вычислен следующим образом:
 уравнение (28)
уравнение (28)
где
SNRreq,m(n) - это требуемый SNR для каждой собственной моды m (полученный из начальной скорости);
SNRs bo - это откат для управляемого режима (к примеру, SNRs bo = 0 дБ); и
SNRs adj,m(n) - это откорректированный SNR собственной моды m для управляемого режима.
Станция A может предоставлять скорректированный SNR для каждой собственной моды в таблицу соответствия, которая затем предоставляет конечную скорость для этой собственной моды. Станция A может использовать ту же таблицу соответствия, которую использовала станция B для получения начальной скорости каждой собственной моды, или другую таблицу соответствия.
Если неуправляемый режим выбран для использования, то станция A может принимать начальную скорость для каждой собственной моды и может определять одну конечную скорость передачи данных в неуправляемом режиме. Откорректированный SNR для каждой собственной моды может быть вычислен следующим образом:
 уравнение (29)
уравнение (29)
где
SNRu bo - это откат для неуправляемого режима (к примеру, SNRu bo = 3 дБ); и
SNRu adj,m(n) - это откорректированный SNR собственной моды m для неуправляемого режима.
SNRu bo может использоваться для того, чтобы учитывать различные факторы, к примеру, общую мощность передачи, распределяемую по всем NS пространственным каналам (даже для неоптимальных), потерю производительности вследствие варьирования SNR в каждом пакете данных, и т.п. SNRu bo, SNRs bo и SNRadj_rateмогут определяться посредством моделирования на вычислительных машинах, эмпирических измерений и т.д.
Число пространственных каналов для использования при передаче данных в текущем кадре n, Nsch(n), может быть определено посредством подсчета числа "оптимальных" собственных мод с откорректированными SNR больше порога SNR, SNRth. Для каждой собственной моды m, если SNRu adj,m(n) SNRth, то собственная мода m подсчитывается для Nsch(n). Число пространственных каналов для использования в неуправляемом режиме, таким образом, меньше или равно числу собственных мод, или Nsch(n)NS.Средний SNR для неуправляемого режима, SNRavg(n), может быть вычислен следующим образом:
 уравнение (30)
уравнение (30)
Станция B выбирает начальную скорость каждой собственной моды на основе того допущения, что все NS собственных мод используются для передачи данных и что равная мощность передачи используется для всех собственных мод. Если менее NS пространственных каналов используется для неуправляемого режима, то большая мощность передачи может быть использована для каждого выбранного пространственного канала. Первый член правой части уравнения (30) вычисляет использование более высокой мощности передачи для каждого пространственного канала, если менее NS пространственных каналов выбрано для использования. Второй член правой части уравнения (30) - это средний SNR (в дБ) для Nsch(n) пространственных каналов, выбранных для использования в кадре n.
Станция A может предоставлять средний SNR в таблицу соответствия, которая затем предоставляет конечную скорость для неуправляемого режима. Станция A может использовать ту же таблицу соответствия, которую использовала станция B для получения начальной скорости неуправляемого режима, или другую таблицу соответствия.
Альтернативно, станция A может принимать одну начальную скорость для неуправляемого режима от станции B. В этом случае станция A может определять требуемый SNR для неуправляемого режима на основе начальной скорости, корректировать требуемый SNR на основе "возраста" информации SNR и определять конечную скорость неуправляемого режима на основе откорректированного SNR.
В управляемом и неуправляемом режимах конечные скорости также могут определяться на основе другой важной информации, к примеру, изменяющегося во времени характера MIMO-канала. Например, откат SNR, SNRage_bo(n), или порог "возраста", Thrate age, может быть функцией от типа канала (к примеру, с быстрым или медленным затуханием). Для простоты откат SNR вычислен на основе линейной функции от "возраста", как показано в уравнении (27). В общем, откат SNR может быть линейной или нелинейной функцией от "возраста" или других параметров.
Фиг.3 иллюстрирует блок-схему последовательности операций процесса 300 выбора режима передачи данных в беспроводной системе. Сначала получается информация канала, используемая для передачи данных посредством беспроводного канала (этап 312). В MIMO-системе информация канала может содержать собственные векторы, используемые для передачи данных по собственным модам MIMO-канала, и может быть получена из управляемого или неуправляемого MIMO-контрольного сигнала. Определяется "возраст" информации канала (этап 314). Это может выполняться посредством определения "возраста" (к примеру, неуправляемого MIMO)-контрольного сигнала, из которого получается информация канала. После этого выбирается режим передачи из нескольких поддерживаемых режимов передачи на основе "возраста" информации канала и, возможно, другой информации (к примеру, изменяющейся во времени характеристики MIMO-канала, технических характеристик принимающего объекта и т.д.) (этап 316). Данные затем обрабатываются и передаются посредством беспроводного канала в соответствии с выбранным режимом передачи (этап 318).
Для простоты вышеприведенное описание рассматривает примерную MIMO-систему, которая поддерживает два режима передачи: управляемый режим и неуправляемый режим. В целом, система может поддерживать любой режим передачи и любое число режимов передачи. Например, система может поддерживать режим передачи, при котором данные передаются по ортогональным пространственным каналам с пространственным кодированием с расширением спектра, режим передачи, при котором данные передаются по ортогональным пространственным каналам без пространственного кодирования с расширением спектра (управляемый режим), режим передачи, при котором данные передаются по пространственным каналам с пространственным кодированием с расширением спектра (неуправляемый режим), режим передачи, при котором данные передаются по пространственным каналам без пространственного кодирования с расширением спектра, режим передачи, при котором данные передаются по одному оптимальному пространственному каналу без пространственного кодирования с расширением спектра, режим передачи, при котором данные передаются от одной передающей антенны и т.д., либо их сочетание.
Фиг.4 иллюстрирует блок-схему последовательности операций процесса 400 осуществления выбора скорости в беспроводной системе. Сначала получается информация состояния канала, указывающая качество принимаемого сигнала беспроводного канала, используемого для передачи данных (этап 412). Информация состояния канала может быть в форме принимаемых SNR, начальных скоростей и т.д. и может определяться принимающим объектом и отправляться передающим объектом. Определяется "возраст" информации состояния канала (этап 414). Это может выполняться посредством определения "возраста" (к примеру, управляемого или неуправляемого MIMO)-контрольного сигнала, из которого выводится информация состояния канала. После этого выбирается одна или более конечных скоростей на основе информации состояния канала, "возраста" информации состояния канала и, возможно, другой информации (этап 416). Например, конечные скорости могут быть определены на основе режима передачи, выбранного для использования (к примеру, управляемого или неуправляемого режима), коэффициента отката, который зависит от "возраста" информации состояния канала (к примеру, SNRage_bo(n)), коэффициента отката, который зависит от выбранного режима передачи (к примеру, SNRs bo или SNRu bo), изменяющейся во времени характеристики беспроводного канала и т.д. Данные затем обрабатываются и передаются посредством беспроводного канала в соответствии с выбранными конечными скоростями (этап 418).
Описанные в данном документе методики выбирают режим передачи и конечные скорости передачи данных на основе наиболее актуальной информации, доступной в передающей станции A, и "возраста" этой информации. Информация канала, используемая для выбора режима передачи, и информация состояния канала, используемая для выбора скорости, может выводиться из одних или различных MIMO-контрольных сигналов. Различные режимы и скорости передачи могут выбираться для различных кадров на основе информации вследствие "возраста" информации и, возможно, других факторов.
Как упоминалось выше, методики выбора режима и скорости передачи могут использоваться для MIMO-системы с несколькими несущими. Несколько несущих может быть предоставлено посредством мультиплексирования с ортогональным частотным разделением каналов (OFDM) или каких-либо других структур. OFDM эффективно разбивает общую полосу пропускания системы на несколько (NF) ортогональных поддиапазонов, которые также упоминаются как тоны, вспомогательные несущие, приемники и частотные каналы. В OFDM каждый поддиапазон ассоциативно связан с соответствующей вспомогательной несущей, которая может быть модулирована данными. В MIMO-системе, использующей OFDM, пространственная обработка может выполняться по каждому из поддиапазонов, используемых для передачи данных.
В управляемом режиме матрица характеристик каналаH(k,i) может быть получена для каждого поддиапазона k в периоде символа i и разложена для получения NS собственных мод этого поддиапазона. Сингулярные значения в каждой диагональной матрице Σ(k, i), для k = 1... NF, могут быть упорядочены таким образом, что первый столбец содержит наибольшее сингулярное значение, второй столбец содержит следующее наибольшее сингулярное значение и т.д., или σ1(k, i) σ2(k, i) ... σNs(k, i), где σm(k, i)- это сингулярное значение в m-ном столбце Σ(k, i) после упорядочивания. Когда сингулярные значения для каждой матрицы Σ(k, i) упорядочены, собственные векторы (или столбцы) ассоциативно связанных матриц V(k, i) и U(k, i) для этого поддиапазона также упорядочиваются соответствующим образом. "Широкополосная" собственная мода может задаваться как набор собственной моды того же порядка по всем NF поддиапазонам после упорядочивания. M-ная широкополосная мода, таким образом, включает в себя m-ную собственную моду всех поддиапазонов. Каждая широкополосная собственная мода ассоциативно связана с соответствующим набором NF собственных векторов для NF поддиапазонов. Далее может выполняться выбор режима и скорости передачи для NS широкополосных собственных мод, к примеру, аналогично тому, как описано выше для MIMO-системы с одной несущей.
Фиг.5 иллюстрирует блок-схему передающей станции A 510 и принимающей станции B 550. В станции A 510 процессор 520 данных передачи (TX) принимает данные трафика от источника 512 данных, обрабатывает (к примеру, форматирует, кодирует, перемежает и модулирует) данные трафика и предоставляет символы данных. В управляемом режиме один поток данных может отправляться по каждой собственной моде, и каждый поток данных может кодироваться и модулироваться на основе конечной скорости, выбираемой для этого потока/собственной моды. В неуправляемом режиме несколько потоков данных может отправляться по нескольким пространственным каналам, и одна конечная скорость может использоваться для всех потоков. TX-пространственный процессор 530 выполняет пространственную обработку символов данных и контрольных символов для обеспечения выбранного режима передачи и предоставляет NT потоков символов передачи в NT передающих устройств (TMTR) 532a-532t. Каждое передающее устройство 532 принимает и приводит к соответствующим параметрам надлежащий поток символов передачи, чтобы сгенерировать соответствующий модулированный сигнал. NT модулированных сигналов из передающих устройств 532a-532t передаются через NT антенн 534a-534t, соответственно.
В станции B 550 NR антенн 552a-552r принимают модулированные сигналы, передаваемые станцией A, и каждая антенна предоставляет принимаемый сигнал соответствующему принимающему устройству (RCVR) 554. Каждое принимающее устройство 554 выполняет обработку, комплементарную обработке, выполняемой передающими устройствами 532, и предоставляет принимаемые символы. Принимающий (RX) пространственный процессор 560 выполняет пространственно согласованную фильтрацию принимаемых символов от всех NR принимающих устройств 554 на основе матрицы пространственного фильтра M(n) и предоставляет обнаруженные символы данных. Матрица M(n) выводится на основе выбранного режима передачи и методики обработки приема, выбранной для использования (к примеру, полностью-CSI, MMSE или CCMI). Процессор 570 RX-данных (приема) обрабатывает (к примеру, выполняет обратное символьное преобразование, обратное перемежение и декодирование) обнаруженных символов данных и предоставляет декодированные данные в станцию B.
Блоки 538 и 578 оценки канала выполняют оценку канала станций A и B, соответственно. Контроллеры 540 и 580 управляют работой различных блоков обработки в станциях A и B, соответственно. Запоминающие устройства 542 и 582 сохраняют данные и программный код, используемый контроллерами 540 и 580, соответственно.
Для выбора режима и скорости передачи блок 578 оценки канала может оценить характеристику MIMO-канала от станции A к станции B и принятые SNR пространственных каналов MIMO-канала. Контроллер 580 может определять начальные скорости на основе принимаемых SNR и предоставлять обратно CSI, который может содержать начальные скорости. Предоставляемый обратно CSI обрабатывается процессором 590 TX-данных и дополнительно мультиплексируется с помощью контрольных символов и пространственно обрабатывается для управляемого или неуправляемого режима посредством TX-пространственного процессора 592 для генерирования NR потоков передаваемых символов.
После этого NR передающих устройств 554a-554r приводит к соответствующим параметрам NR потоков передаваемых символов для генерирования NR модулированных сигналов, которые отправляются посредством NR антенн 552a-552r.
В станции A 510 модулированные сигналы из станции B принимаются посредством NT антенн 534 и обрабатываются посредством NT принимающих устройств 532 для получения принимаемых символов для станции B. Принимаемые символы дополнительно обрабатываются RX-пространственным процессором 544 и процессором 546 RX-данных для получения CSI обратной связи от станции B. Контроллер 540 принимает CSI обратной связи, выбирает режим передачи и конечные скорости для использования при передаче данных в станцию B, предоставляет регулирование скорости в источник данных 512 и процессор 520 TX-данных и предоставляет выбранный режим передачи и информацию канала (к примеру, собственные векторы) TX-пространственному процессору 530.
Описанные в данном документе методики выбора режима и скорости передачи могут быть реализованы различными средствами. Например, эти методики могут быть реализованы в аппаратных средствах, программном обеспечении или их сочетании. При реализации в аппаратных средствах блоки обработки, используемые для осуществления выбора режима и скорости передачи, могут быть реализованы в одной или более специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем матричных БИС (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, предназначенных, чтобы выполнять описанные в данном документе функции, или их сочетании.
При реализации в программном обеспечении методики выбора режима и скорости передачи могут быть реализованы с помощью модулей (к примеру, процедур, функций и т.п.), которые выполняют описанные в данном документе функции. Программные коды могут быть сохранены в запоминающем устройстве (к примеру, в запоминающем устройстве 542 и/или 580 на фиг.5) и приведены в исполнение блоком обработки (к примеру, контроллером 540 и/или 860). Запоминающее устройство может быть реализовано в процессоре или внешне по отношению к процессору, причем во втором случае оно может быть подсоединено к процессору с помощью различных средств, известных в данной области техники.
Предшествующее описание раскрытых вариантов осуществления предоставлено для того, чтобы дать возможность любому специалисту в данной области техники создавать или использовать настоящее изобретение. Различные модификации в этих вариантах осуществления должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам осуществления без отступления от духа и области применения изобретения. Таким образом, настоящее изобретение не предназначено, чтобы быть ограниченным показанными в данном документе вариантами осуществления, а должно удовлетворять самой широкой области применения, согласованной с принципами и новыми признаками, раскрытыми в данном документе.



Изобретение относится к технике связи. Технический результат состоит в повышении эффективности передачи в изменяющейся во времени беспроводной системе. Для этого при выборе режима передачи, используемого при передаче данных посредством MIMO-канала от станции А к станции В, станция А получает информацию канала, используемую для пространственной обработки, и определяет "возраст" этой информации. Станция А выбирает один из нескольких режимов передачи на основе "возраста" информации канала и, возможно, другой информации (к примеру, характеристики затухания MIMO-канала). Для выбора скоростей, используемых при передаче данных, станция А получает информацию состояния канала (CSI), указывающую качество принимаемого сигнала для MIMO-канала, к примеру, принимаемые SNR или "начальные" скорости. Станция А определяет "возраст" CSI и выбирает одну или более "конечных" скоростей на основе CSI, "возраста" CSI, выбранного режима передачи и, возможно, другой информации. Станция А обрабатывает данные в соответствии с выбранным режимом передачи и конечными скоростями и передает обработанные данные станции В. 4 н. и 25 з.п. ф-лы, 6 ил.
получают информацию о состоянии канала, указывающую качество принятых по беспроводному каналу сигналов;
получают информацию канала, используемую для передачи данных по собственным модам канала с несколькими входами и несколькими выходами (MIMO), из управляемого или неуправляемого MIMO-контрольного сигнала;
определяют время существования упомянутой информации канала и информации о состоянии канала;
выбирают режим передачи из множества режимов передачи на основе времени существования информации канала; и
выбирают по меньшей мере одну скорость для передачи данных на основе информации о состоянии канала и времени существования информации о состоянии канала, причем данные передаются через беспроводной канал в соответствии с выбранным режимом передачи и по меньшей мере одной скоростью, выбранной для передачи данных.
получают собственные векторы, используемые для передачи данных по множеству ортогональных пространственных каналов MIMO канала, при этом упомянутая информация канала содержит собственные векторы.
определяют время существования контрольного сигнала, используемого для получения информации канала и информации о состоянии канала, при этом время существования информации канала и информации о состоянии канала определяется на основе времени существования контрольного сигнала.
определяют упомянутый порог на основе функции изменяющейся во времени характеристики беспроводного канала.
определяют коэффициент отката на основе времени существования информации о состоянии канала, при этом упомянутая, по меньшей мере, одна скорость дополнительно выбирается на основе коэффициента отката.
определяют коэффициент отката на основе режима передачи, выбранного для использования при передаче данных, при этом множество режимов передачи поддерживается упомянутой системой, и при этом упомянутая, по меньшей мере, одна скорость дополнительно выбирается на основе коэффициента отката.
информация о состоянии канала содержит множество начальных скоростей для множества пространственных каналов MIMO канала, по одной начальной скорости для каждого пространственного канала.
определяют требуемое отношение "сигнал-помехи-и-шум" (SNR) для каждого из множества пространственных каналов на основе начальной скорости пространственного канала,
определяют откат SNR на основе времени существования множества начальных скоростей,
определяют откорректированный SNR для каждого из множества пространственных каналов на основе требуемого SNR пространственного канала и отката SNR, и
определяют конечную скорость для каждого из множества пространственных каналов на основе откорректированного SNR для пространственного канала, при этом данные передаются по множеству пространственных каналов MIMO канала с помощью множества конечных скоростей, определенных для множества пространственных каналов, и при этом, по меньшей мере, одна скорость, выбранная для передачи данных, содержит множество конечных скоростей.
определяют требуемое отношение "сигнал-помехи-и-шум" (SNR) для каждого из множества пространственных каналов на основе начальной скорости пространственного канала,
определяют откат SNR на основе времени существования множества начальных скоростей,
определяют откорректированный SNR для каждого из множества пространственных каналов на основе требуемого SNR пространственного канала и отката SNR,
определяют средний SNR для множества откорректированных SNR, определенных для множества пространственных каналов, и
определяют конечную скорость для множества пространственных каналов на основе среднего SNR, при этом данные передаются по множеству пространственных каналов с использованием конечной скорости, определенной для множества пространственных каналов, и
при этом по меньшей мере одна скорость, выбранная для передачи данных, содержит конечную скорость.
контроллер, выполненный с возможностью получения информации о состоянии канала, указывающей качество принятых по беспроводному каналу сигналов, получения информации канала, используемой для передачи данных по собственным модам канала с несколькими входами и несколькими выходами (MIMO), из управляемого или неуправляемого MIMO-контрольного сигнала, определения времени существования упомянутой информации канала и информации о состоянии канала, выбора режима передачи из нескольких режимов передачи на основе времени существования информации канала, выбора по меньшей мере одной скорости для передачи данных на основе информации о состоянии канала и времени существования информации о состоянии канала; и
пространственный процессор для выполнения пространственной обработки данных в соответствии с выбранным режимом передачи и по меньшей мере одной скоростью, выбранной для передачи данных.
информация о состоянии канала содержит множество начальных скоростей для множества пространственных каналов MIMO канала, по одной начальной скорости для каждого пространственного канала.
средство для получения информации о состоянии канала, указывающей качество принятых по беспроводному каналу сигналов;
средство для получения информации канала, используемой для передачи данных по собственным модам канала с несколькими входами и несколькими выходами (MIMO), из управляемого или неуправляемого MIMO-контрольного сигнала;
средство для определения времени существования упомянутой информации канала и информации о состоянии канала;
средство для выбора режима передачи из нескольких режимов передачи на основе времени существования информации канала;
средство для выбора по меньшей мере одной скорости для передачи данных на основе информации о состоянии канала и времени существования информации о состоянии канала; и причем данные передаются через беспроводной канал в соответствии с выбранным режимом передачи и по меньшей мере одной скоростью, выбранной для передачи данных.
средство для определения времени существования контрольного сигнала, используемого для получения информации канала и информации о состоянии канала, при этом время существования информации канала и информации о состоянии канала определяется на основе времени существования контрольного сигнала.
средство для определения коэффициента отката на основе времени существования информации о состоянии канала, при этом упомянутая, по меньшей мере, одна скорость дополнительно выбирается на основе коэффициента отката.
информация о состоянии канала содержит множество начальных скоростей для множества пространственных каналов MIMO канала, по одной начальной скорости для каждого пространственного канала.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ И СИСТЕМА С МНОГОКАНАЛЬНЫМ ДОСТУПОМ И СПЕКТРОМ РАСШИРЕНИЯ СООБЩЕНИЯ ДЛЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ МЕЖДУ МНОЖЕСТВОМ СТАНЦИЙ С ИСПОЛЬЗОВАНИЕМ КОДОВОГО РАЗДЕЛЕНИЯ СИГНАЛОВ СВЯЗИ СПЕКТРА РАСШИРЕНИЯ | 1991 |
|
RU2104615C1 |

