Требование приоритета по §119 U.S.C. 35 (свода законов США).
Настоящая заявка на патент притязает на приоритет предварительной заявки с порядковым номером 60/421.309, называемой "MIMO WLAN System", зарегистрированной 25 октября 2002 г., право на которую передано правопреемнику настоящего изобретения, и которая включена в настоящее описание во всей своей полноте по ссылке.
Область техники, к которой относится изобретение
Настоящее изобретение, в основном, относится к связи и, более конкретно, к терминалу пользователя в системе связи с многоканальным входом, многоканальным выходом (МВМВ, MIMO).
Уровень техники
MIMO-система использует для передачи данных несколько (NT) передающих антенн и несколько (NR) приемных антенн и обозначается как система (NT, NR). MIMO-канал, сформированный NT передающими и NR приемными антеннами, может быть разложен на NS пространственных каналов, где NS≤min{NT, NR}. Для достижения большей общей пропускной способности для передачи NS независимых потоков данных могут использоваться NS пространственных каналов. В основном, для одновременной передачи и восстановления нескольких потоков данных пространственная обработка обычно выполняется в приемнике и может выполняться или не выполняться в передатчике.
Стандартная MIMO-система обычно использует определенную схему передачи для одновременной передачи нескольких потоков данных. Эта схема передачи может быть выбрана на основе компромисса между различными факторами, такими как требования к системе, количество обратной связи из приемника в передатчик, возможности передатчика и приемника и так далее. Передатчик, приемник и система, к тому же, разработаны для поддержки выбранной схемы передачи и функционирования в соответствии с ней. Указанная схема передачи обычно имеет предпочтительные признаки, а также неблагоприятные признаки, которые могут воздействовать на эффективность системы.
Следовательно, в технике существует потребность в терминале пользователя, выполненном с возможностью достижения повышенной эффективности.
Раскрытие изобретения
Здесь описан терминал пользователя, который поддерживает несколько режимов пространственного мультиплексирования (ПМ, SM) для повышенной эффективности и большей гибкости. Пространственное мультиплексирование относится к одновременной передаче нескольких потоков данных через несколько пространственных каналов MIMO-канала. Несколько режимов SM могут включать в себя (1) направленный режим, при котором осуществляется передача нескольких потоков данных по ортогональным пространственным каналам и (2) не направленный режим, при котором осуществляется передача нескольких потоков данных из нескольких антенн.
Терминал выбирает из нескольких поддерживаемых режимом SM режим SM для использования при передаче данных. Выбор режимов SM может основываться на различных факторах, таких как статус калибровки терминала, количество данных для передачи, параметры канала, возможности другого объекта связи и так далее. Для передачи данных несколько потоков данных кодируются и модулируются, в соответствии с их выбранными скоростями, для получения нескольких потоков символов данных. Затем, в соответствии с выбранным режимом SM, осуществляется пространственная обработка этих потоков символов данных для получения нескольких потоков символов передачи. Пространственная обработка передачи осуществляется матрицей направляющих векторов для направленного режима и единичной матрицей для не направленного режима. Потоки символов передачи передаются из нескольких антенн и через первую линию связи (например, обратную линию связи).
Для приема данных в соответствии с выбранным режимом SM осуществляется пространственная обработка нескольких потоков принятых символов для второй линии связи (например, прямой линии связи) для получения нескольких потоков восстановленных символов данных. Пространственная обработка приема может основываться на собственных векторах канала для направленного режима и матрицей пространственного фильтра для не направленного режима. Как описано ниже, матрица пространственного фильтра может быть выведенана основе различных способов пространственной обработки приемника. Затем потоки восстановленных символов данных демодулируются и декодируются в соответствии с их выбранными скоростями для получения нескольких потоков декодированных данных для второй линии связи. Терминал также передает/принимает пилот-сигналы и выбранные скорости для каждой линии связи.
Ниже более подробно описаны различные аспекты, варианты осуществления и признаки изобретения.
Краткое описание чертежей
Фиг. 1 изображает MIMO-систему.
Фиг. 2 изображает пространственную обработку в передатчике и приемнике для направленных и не направленных режимов.
Фиг. 3 и 4 изображают пространственную обработку в точке доступа и терминале пользователя для направленных и не направленных режимов, соответственно.
Фиг. 5 изображает блочную диаграмму терминала пользователя и точки доступа.
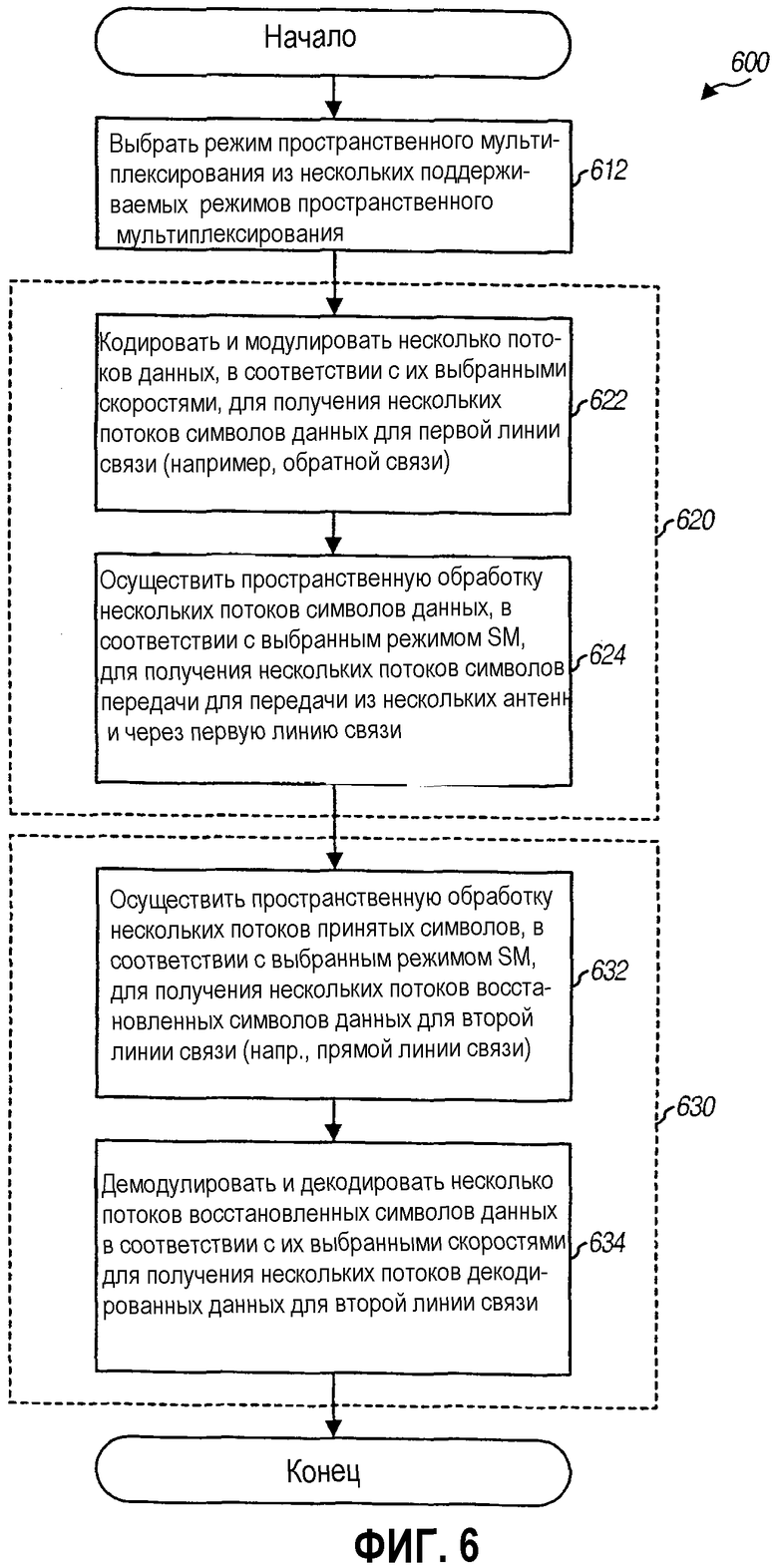
Фиг. 6 изображает процесс передачи и приема данных в MIMO-системе.
Подробное описание предпочтительных вариантов осуществления
Слово "возможный" используется здесь в значении "служащий в виде возможного варианта, примера или иллюстрации". Любой вариант осуществления, описанный здесь как "возможный", не должен обязательно рассматриваться как предпочтительный или имеющий преимущества перед другими вариантами осуществления.
Фиг. 1 изображает MIMO-систему 100 с точками доступа (ТД, AP) и терминалами пользователя (ТП, UT). Для простоты, на фиг. 1 изображена только одна точка 110 доступа. Точкой доступа, в основном, является стационарная станция, которая осуществляет связь с терминалами пользователя и, также, может быть определена как базовая станция или с использованием некоторой другой терминологии. Контроллер 130 системы соединен с точками доступа и обеспечивает их координацию и управление для них. Терминал пользователя может быть стационарным или мобильным и, также, может быть определен как мобильная станция, устройство радиосвязи или с использованием некоторой другой терминологии. Терминал пользователя может осуществлять связь с точкой доступа, в этом случае устанавливаются роли точки доступа и терминала пользователя. Терминал пользователя может также осуществлять равноправную связь с другим терминалом пользователя.
MIMO-системой 100 может быть система дуплексной передачи с временным разнесением каналов (ДВР, TDD) или система дуплексной передачи с частотным разнесением каналов (ДЧР, FDD). Для системы TDD прямая и обратная линия связи совместно используют один диапазон. Для системы FDD прямая и обратная линия связи используют разные диапазоны. Прямой линией связи является линия связи из точек доступа в терминалы пользователя, и обратной линией связи является линия связи из терминалов пользователя в точки доступа. Также MIMO-система 100 может использовать для передачи данных одну несущую или несколько несущих.
Для повышения эффективности и большей гибкости точка 110 доступа и терминал 120 пользователя, каждые, поддерживают несколько режимов пространственного мультиплексирования (ПМ, SM). Обычно направленный режим SM (или просто, направленный режим) может достигать лучшей эффективности, но может использоваться только, если передатчик имеет достаточную информацию о состоянии канала (ИСК, CSI) для ортогонализации пространственных каналов MIMO-канала через разложение или некоторый другой способ. Не направленный режим SM (или просто, не направленный режим) требует очень небольшого количества информации для одновременной передачи нескольких потоков данных через MIMO-канал, но эффективность может быть не такой хорошей, как у направленного режима. Применимый для использования режим SM может выбираться на основе различных факторов, как описано ниже.
В таблице 1 суммируются некоторые ключевые аспекты направленного и не направленного режимов. Каждый режим SM имеет различные возможности и требования.
Для направленного режима передатчик передает пилот-сигнал для обеспечения возможности оценки приемником MIMO-канала, и приемник передает обратно информацию о состоянии канала, достаточную для обеспечения возможности вывода передатчиком направляющих векторов. Или передатчик или приемник разлагает MIMO-канал на собственные моды, которые могут рассматриваться как ортогональные пространственные каналы. Приемник также передает обратно скорость для использования для каждой собственной моды. Передатчик и приемник, оба, выполняют пространственную обработку для передачи данных на собственных модах, как описано ниже.
Для не направленного режима передатчик передает пилот-сигнал для обеспечения возможности оценки приемником MIMO-канала. Приемник передает обратно скорость для использования для каждого пространственного канала. Передатчик передает данные (например, из своих антенн) без какой-либо пространственной обработки, и приемник выполняет пространственную обработку для восстановления переданных данных. Передача пилот-сигнала и пространственная обработка в передатчике и приемнике для направленного и не направленного режимов описаны ниже.
Требования на направленный и не направленный режимы
В последующем описании терминалом пользователя может быть передатчик и/или приемник и точкой доступа, аналогично, может быть передатчик и/или приемник. Равноправная связь может поддерживаться с использованием тех же базовых принципов.
1. Направленный режим
MIMO-канал, сформированный NT передающими антеннами, и NR приемными антеннами может описываться матрицей H характеристик каналов NR × NT, которая может быть выражена следующим образом:
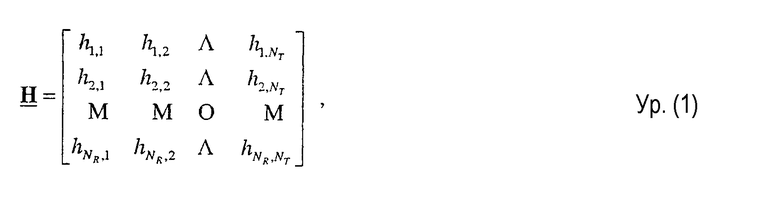
где элемент hi,j, для i=1...NR и j=1...NT, является соединением (т.е., комплексным усилением) между передающей антенной j и приемной антенной i. Для простоты, предполагается, что MIMO-канал имеет полный ранг NS≤NT≤NR.
Разложение одного значения может быть выполнено на H для получения NS собственных мод H, следующим образом:
H=UΣVH, Ур.(2)
где U является унитарнойматрицей (NR×NR) левых собственных векторов H,
Σ является диагональной матрицей (NR×NT) сингулярных значений H,
V является унитарной матрицей (NT×NT) правых собственных векторов H, и
"H" обозначает сопряженное транспонирование. Унитарная матрица М описывается свойством MHМ=I, где I является единичной матрицей. Столбцы унитарной матрицы ортогональны друг другу.
Правые собственные векторы H также определяются как направляющие векторы и могут использоваться для пространственной обработки передатчиком для передачи данных на NS собственных модах H. Левые собственные векторы H могут использоваться для пространственной обработки приемником для восстановления данных, переданных на NS собственных модах. Собственные моды могут рассматриваться как ортогональные пространственные каналы, полученные через разложение. Диагональными элементами Σ являются сингулярные значения H, которые представляют усиления канала для NS собственных мод.
В реальной системе может быть получена только оценка H, и могут быть выведены только оценки V, Σ и U. Из-за различных причин, таких как неточная оценка канала, NS пространственных каналов также обычно не полностью ортогональны друг другу. Для простоты, здесь в описании предполагается, что разложение и оценка канала осуществляются без ошибок. Кроме того, термин "собственная мода" охватывает случай, где делается попытка ортогонализировать пространственные каналы с использованием разложения, даже если попытка не может быть полностью успешной, например, из-за неточной оценки канала.
В таблице 2 суммируется пространственная обработка в передатчике и приемнике для направленного режима. В таблице 2 s является вектором с NS символами данных для передачи на NS собственных модах H, xst является вектором с NT символами передачи для передачи из NT передающих антенн, rst является вектором с NR принятыми символами, полученными из NR приемных антенн,  является вектором с NS восстановленными символами данных (т.е.,
является вектором с NS восстановленными символами данных (т.е.,  является оценкой s), и нижний индекс "st" обозначает направленный режим. Используемый здесь "символ данных" относится к символу модуляции для данных, и "символ пилот-сигнала" относится к символу модуляции для пилот-сигнала.
является оценкой s), и нижний индекс "st" обозначает направленный режим. Используемый здесь "символ данных" относится к символу модуляции для данных, и "символ пилот-сигнала" относится к символу модуляции для пилот-сигнала.
Пространственная обработка для направленного режима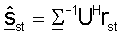
Разложение собственного значения может быть выполнено также на корреляционной матрице H, которая представлена R=HHH, следующим образом:
R=HHH=VΛVH, Ур. (3),
где Λ является диагональной матрицей собственных значений, которые являются квадратами сингулярных значений в Σ. Передатчик может выполнять пространственную обработку с использованием V для получения xst, и приемник может выполнять пространственную обработку с использованием VHHH для получения .
2. Не направленный режим
Для не направленного режима передатчик может передавать один поток символов данных из каждой передающей антенны. Пространственный канал для этого режима может соответствовать одной передающей антенне. Приемник выполняет пространственную обработку для выделения и восстановления переданного потока символов данных. Приемник может использовать различные способы обработки приемника, такие как способ инверсии корреляционной матрицы каналов (ИКМК, CCMI) (также известный как способ обращения в нуль незначащих коэффициентов (в матрице)), способ минимальной среднеквадратической ошибки (МСКО, MMSE), способ последовательного подавления помех (ППП, SIC) и так далее.
Таблица 3 суммирует пространственную обработку в передатчике и приемнике для не направленного режима. В таблице 3 xns является вектором с NT символами данных для передачи из NT передающих антенн, rns является вектором с NR принятыми символами, полученными из NR приемных антенн, Mccmi является матрицей пространственного фильтра для способа CCMI, Mmmse является матрицей пространственного фильтра для способа MMSE, Dmmse является диагональной матрицей для способа MMSE (которая содержит диагональные элементы MmmseH), и нижний индекс "ns" обозначает не направленный режим.
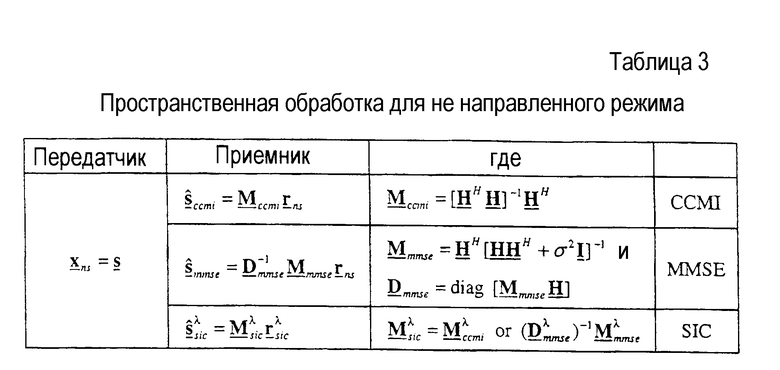
Для простоты, предполагается, что шум n MIMO-канала является аддитивным белым гауссовским шумом (АБГШ, AWGN) со средним значением в нуле, дисперсией σ2 и автоковариационной матрицей ϕnn=E[nnH]=σ2I.
Для способа SIC приемник обрабатывает NR принятых потоков символов на NS последовательных стадиях для восстановления одного потока символов данных на каждой стадии. Для каждой стадии λ, где λ=1...NS, приемник первоначально выполняет пространственную обработку на NR входных потоках символов для стадии λ с использованием CCMI, MMSE или некоторого другого способа и получает один поток восстановленных символов данных. NR принятых потоков символов являются NR входными потоками символов для стадии 1. Приемник далее обрабатывает (например, демодулирует, осуществляет обратное перемежение и декодирует) поток восстановленных символов данных для стадии λ для получения потока декодированных данных, оценивает помехи, вызываемые этим потоком, для других потоков символов данных, еще не восстановленных, и убирает оцененные помехи из NR входных потоков символов для стадии λ для получения NR входных потоков символов для стадии λ+1. Затем приемник повторяет идентичную обработку на NR входных потоках символов для стадии λ+1 для восстановления другого потока символов данных.
Для каждой стадии λ SIC-приемник выводит матрицу Mλ sic пространственного фильтра для этой стадии на основе сокращенной матрицы характеристик каналов Hλ и с использованием CCMI, MMSE или некоторого другого способа. Сокращенная матрица Hλ получается посредством удаления λ-1 столбцов в исходной матрице H, соответствующих λ-1 потокам символов данных, которые уже восстановлены. Матрица Mλ sic имеет размерность (NT-λ+1)×NR. Так как Hλ различна для каждой стадии, Mλ sic для каждой стадии также различна.
Приемник может использовать также другие способы пространственной обработки приемника для восстановления потоков переданных символов данных.
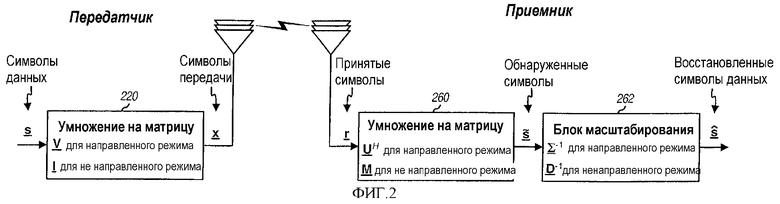
Фиг. 2 изображает пространственную обработку в передатчике и приемнике для направленного и не направленного режимов. В передатчике вектор s данных умножается блоком 220 либо на матрицу V для направленного режима, либо на единичную матрицу I для не направленного режима для получения вектора x символов передачи. В приемнике принятый вектор r символов умножается блоком 260 либо на матрицу UH для направленного режима, либо на матрицу М пространственного фильтра для не направленного режима для получения вектора обнаруженных символов  являющегося ненормализованной оценкой s. Матрица М может быть выведена на основе CCMI, MMSE или некоторого другого способа. Вектор
являющегося ненормализованной оценкой s. Матрица М может быть выведена на основе CCMI, MMSE или некоторого другого способа. Вектор  дополнительно масштабируется либо диагональной матрицей Σ-1 для направленного режима, либо диагональной матрицей D-1 для не направленного режима для получения вектора
дополнительно масштабируется либо диагональной матрицей Σ-1 для направленного режима, либо диагональной матрицей D-1 для не направленного режима для получения вектора  восстановленных символов данных, где D-1=I для способа CCMI и D-1=D-1 mmse для способа MMSE.
восстановленных символов данных, где D-1=I для способа CCMI и D-1=D-1 mmse для способа MMSE.
3. Дополнительная служебная сигнализация для направленного и не направленного режимов.
Направленный и не направленный режимы имеют различные требования на пилот-сигнал и дополнительную служебную сигнализацию, как отражено в таблице 1 и описано ниже.
A. Передача пилот-сигнала
Для обоих, направленного и не направленного, режимов передатчик может передавать MIMO пилот-сигнал (который является не направленным пилот-сигналом) для обеспечения возможности оценки приемником MIMO-канала и получения матрицы H. MIMO пилот-сигнал содержит NT ортогональных передач пилот-сигнала, передаваемых из NT передающих антенн, где может быть получена ортогональность по времени, частоте, коду или их комбинации. Для ортогональности кода NT передач пилот-сигнала могут передаваться одновременно из NT передающих антенн с передачей пилот сигнала из каждой антенны, "покрытой" отличной ортогональной последовательностью (например, Уолша). Приемник "снимает покрытие" принятых символов пилот-сигнала для каждой приемной антенны i теми же NT ортогональными последовательностями, используемыми передатчиком, для получения оценок комплексного усиления канала между приемной антенной i и каждой из NT передающих антенн. Покрытие в передатчике и снятие покрытия в приемнике выполняются, как в системе множественного доступа с кодовым разделением каналов (МДКР, CDMA). Для ортогональности частоты NT передачи пилот-сигнала для NT передающих антенн могут передаваться одновременно на различных поддиапазонах полной ширины полосы частот системы. Для ортогональности времени NT передач пилот-сигнала для NT передающих антенн может передаваться в различных временных интервалах. В любом случае, ортогональность среди NT передач пилот-сигнала обеспечивает возможность различения приемником передач пилот-сигнала из каждой передающей антенны.
Для направленного режима приемник передает обратно информацию о состоянии канала, достаточную для обеспечения возможности вывода передатчиком направляющих векторов. Приемник может передать эту информацию непосредственно (например, передавая элементы V) или в косвенной форме (например, передавая направленный или не направленный пилот-сигнал).
B. Управление/выбор скорости
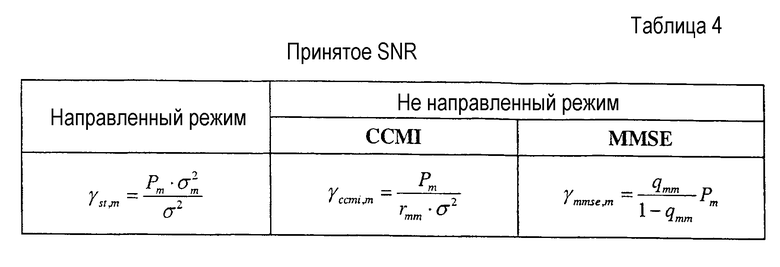
Приемник может оценивать принятое отношение "сигнала к шуму и помехам" (СШ, SNR) для каждого пространственного канала, который может соответствовать собственной моде для направленного режима или передающей антенне для не направленного режима. Принятое SNR зависит от режима SM и способа пространственной обработки, используемого передатчиком и приемником.
В таблице 4 суммируется принятое SNR для направленного и не направленного режимов. В таблице 4 Pm является мощностью передачи, используемой для пространственного канала m, σ2 является дисперсией шума, σm является сингулярным значением для собственной моды m (т.е., m-м элементом диагонали Σ), rmm является m-м элементом диагонали R (которая представлена R=HHH), qmm является m-м элементом диагонали Q, и γm является SNR для пространственного канала m. Принятые SNR для способа SIC зависят от способа пространственной обработки (например, CCMI или MMSE) и порядка, в котором восстанавливаются потоки данных. Действие SNR может быть определено как равное принятому SNR плюс SNR фактора потери мощности. SNR фактора потери мощности может быть установлено в положительное значение для учета ошибки оценки, вариации SNR во времени и так далее, но, также, может быть установлено в нуль.
MIMO-система может поддерживать набор скоростей. Каждая ненулевая скорость соответствует определенной скорости передачи данных или спектральной эффективности, определенной схеме кодирования, определенной схеме модуляции и определенному SNR, требуемому для получения целевого уровня выполнения (например, однопроцентной частоты пакетной ошибки (ЧПО, PER)). SNR, требуемое для каждой скорости, может быть определено компьютерным моделированием, эмпирическим измерением и так далее, и с предположением относительно канала AWGN. В таблице поиска (ТП, LUT) могут поддерживаться скорости, поддерживаемые системой, и требуемые для них SNR. Для каждого пространственного канала в качестве скорости для использования для пространственного канала выбирается самая высокая скорость в таблице поиска с требуемым SNR, которое не больше действующей SNR пространственного канала.
Для каждого пространственного канала или комбинации пространственных каналов может использоваться управление скоростью по замкнутому циклу. Приемник может оценивать полученный SNR для каждого пространственного канала, выбирать соответствующую скорость для пространственного канала и передавать выбранную скорость обратно. Передатчик может передавать каждый поток символов данных в соответствии с выбранной скоростью.
C. Выбор режима
Терминал 120 пользователя в любой заданный момент может использовать для связи либо направленный, либо не направленный режим. Выбор режима может быть сделан на основе различных факторов, таких как следующие.
Дополнительная служебная сигнализация - Направленный режим требует большего количества дополнительной служебной сигнализации, чем не направленный режим. Для направленного режима приемник должен передавать обратно достаточную информацию о состоянии канала, а также скорости для NS собственных мод. В некоторых случаях добавочная дополнительная служебная информация CSI не может поддерживаться или является не обоснованной. Для не направленного режима приемнику требуется передавать обратно только скорости для пространственных каналов, что представляет намного меньшее количество дополнительной служебной сигнализации.
Количество данных - Направленный режим, в основном, является более эффективным, но также требует большего количества этапов установки (например, оценка канала, разложение сингулярного значения и обратная связь CSI). Если требуется передача только небольшого количества данных, то более быстрой и более эффективной может быть передача этих данных с использованием не направленного режима.
Возможности - Терминал пользователя может осуществлять равноправную связь с другим терминалом пользователя, который поддерживает только один режим (например, или направленный, или не направленный режим). В этом случае два терминала могут осуществлять связь с использованием общего режима, поддерживаемого обоими терминалами пользователя.
Параметры канала - Направленный режим более просто может поддерживаться для статических каналов, медленно изменяющихся каналов и каналов с сильным компонентом линии прямой видимости (например, канала Раиса (Rician)).
SNR приемника - Направленный режим обеспечивает лучшую эффективность в условиях низкого SNR. Терминал пользователя может выбрать использование направленного режима, когда SNR понижается ниже некоторого порогового значения.
Статус калибровки - Направленный режим может быть выбран для использования, если передатчик и приемник "калиброваны" так, чтобы характеристики канала прямой и обратной линии связи были взаимнообратны. Как описано ниже, для направленного режима взаимнообратные прямая и обратная линии связи могут упростить передачу пилот-сигнала и пространственную обработку и для передатчика и для приемника.
Терминал пользователя, не являющийся мобильным и осуществляющий связь с одной точкой доступа, может длительное время использовать направленный режим. Терминал пользователя, являющийся мобильным и осуществляющий связь с различными объектами (например, различными точками доступа и/или другими терминалами пользователя), может использовать не направленный режим до момента времени, когда становится более выгодным использование направленного режима. Терминал пользователя также может, соответственно, переключаться между направленным и не направленным режимами. Например, терминал пользователя может использовать не направленный режим для малых пакетов данных (или коротких сеансов передачи данных) и в начале длинных пакетов данных (или длительных сеансов передачи данных), и может использовать направленный режим для остальной части длинных пакетов данных. В виде другого возможного варианта, терминал пользователя может использовать направленный режим для канала с относительно статическими параметрами и может использовать не направленный режим, когда параметры канала изменяются более быстро.
4. TDD MIMO-система
Ниже описан многорежимный терминал пользователя для возможной MIMO-системы беспроводной локальной сети (ЛСР, WLAN). В MIMO-системе WLAN используется ортогональное мультиплексирование деления частоты (ОМДЧ, OFDM), которое является способом модуляции нескольких несущих, эффективно разделяющим полную ширину полосы частот системы на несколько (NF) ортогональных поддиапазонов. При OFDM каждый поддиапазон сопоставлен соответствующей несущей, которая может быть модулирована данными.
Возможная MIMO-система WLAN является системой TDD. Обычно для системы TDD существует высокая степень корреляции между характеристиками прямой и обратной линий связи, так как эти линии связи совместно используют один частотный диапазон. Однако характеристики каналов передачи/приема в точке доступа обычно не идентичны характеристикам каналов передачи/приема в терминале пользователя. Отличия могут быть определены и учтены посредством калибровки. Тогда может быть принято, что полные характеристики прямой и обратной линий связи являются взаимнообратными (т.е., транспонированными). С взаимнообратными прямой и обратной линиями связи оценка канала и пространственная обработка для направленного режима могут быть упрощены.
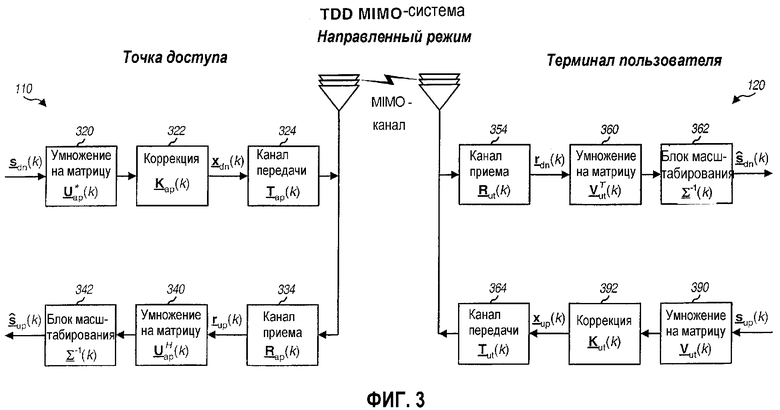
Фиг. 3 изображает каналы передачи/приема в точке 110 доступа и терминале 120 пользователя. В точке 110 доступа канал 324 передачи и канал 334 приема моделируются матрицами Tap(k) и Rap(k), соответственно, для каждого поддиапазона k. В терминале 120 пользователя канал 364 передачи и канал 354 приема моделируются матрицами Tut(k) и Rut(k), соответственно, для каждого поддиапазона k.
В таблице 5 суммируется калибровка и разложение сингулярного значения для прямой и обратной линий связи в MIMO-системе TDD WLAN. "Рабочие" характеристики канала прямой и обратной линий связи, Hedn(k) и Hedp(k), включают в себя характеристики соответствующих каналов передачи и приема. Диагональные матрицы коррекции Kap(k) и Кut(k) получаются посредством выполнения калибровки пилот-сигналами MIMO, передаваемыми и терминалом пользователя и точкой доступа. Характеристики "калиброванного" канала прямой и обратной линий связи, Hcdn(k) и Hcup(k), включают в себя матрицы коррекции и являются взаимнообратными (т.е. Hcup(k)=HT cdn(k), где "T" обозначает транспонирование).
Характеристики канала для MIMO-системы TDD WLAN







Так как Hcdn(k) и Hcup(k) взаимнообратные, то матрицы V* ut(k) и U* ap(k) левых и правых собственных векторов Hcdn(k) являются комплексно сопряженными матрицам Vut(k) и Uap(k) правых и левых собственных векторов _CUP (K). Матрица Uap(k) может использоваться точкой 110 доступа для пространственной обработки и передачи и приема. Матрица Vut(k) может использоваться терминалом 120 пользователя для пространственной обработки и передачи и приема.
Сингулярное разложение может выполняться независимо для каждого из NF поддиапазонов. Для каждого поддиапазона сингулярные значения в Σ(k) могут быть упорядочены от наибольшего до наименьшего, и собственные векторы в V(k) и U(k) могут быть упорядочены соответственно. "Широкополосная" собственная мода может быть определена как набор собственных мод одного порядка для всех NF поддиапазонов после упорядочения. Требуется выполнение разложения только или терминалом 120 пользователя, или точкой 110 доступа. Если оно выполняется терминалом 120 пользователя, то точке 110 доступа могут быть обеспечены матрицы Uap(k), для k=1...NF, либо непосредственно (например, посредством передачи элементов Uap(k)), или в косвенной форме (например, посредством передачи направленного пилот-сигнала).
В таблице 6 суммируется пространственная обработка в точке 110 доступа и терминале 120 пользователя для передачи и приема данных по прямой и обратной линиям связи в MIMO-системе TDD WLAN для направленного режима. В таблице 6 нижний индекс "up" обозначает обратную линию связи, и нижний индекс "dn" обозначает прямую линию связи.
Пространственная обработка для направленного режима в MIMO-системе TDD WLAN



Для направленного режима точка доступа может передавать по нисходящей линии связи пилот-сигнал MIMO. Терминал пользователя может оценивать калиброванный канал прямой линии связи на основе пилот-сигнала MIMO, выполнять сингулярное разложение и передавать направленный пилот-сигнал по обратной линии связи с использованием матрицы Vut(k). Направленным пилот-сигналом является пилот-сигнал, передаваемый на собственных модах, с использованием направляющих векторов, идентичных направляющим векторам, которые используются для передачи данных на собственных модах. Точка доступа может непосредственно оценивать матрицу Uap(k) на основе направленного пилот-сигнала обратной линии связи. Для направленного режима пилот-сигналы могут также передаваться иначе. Например, терминал пользователя может передавать пилот-сигнал MIMO, и точка доступа может передавать направленный пилот-сигнал. В виде другого возможного варианта, точка доступа и терминал пользователя, оба, могут передавать пилот-сигналы MIMO.
Для не направленного режима передатчик (точка доступа или терминал пользователя) может передавать пилот-сигнал MIMO наряду с передачей данных. Приемник выполняет пространственную обработку (например, с использованием CCMI, MMSE, SIC или некоторого другого способа) для восстановления потоков символов данных, как описано выше.
В таблице 7 суммируется вариант осуществления передачи пилот-сигнала и пространственной обработки для направленного и не направленного режимов для MIMO-системы TDD WLAN.
Передача данных в MIMO-системе TDD WLAN
UT передает направленный пилот-сигнал
UT принимает данные с использованием Vut(k)
UT принимает данные с использованием CCMI, MMSE, SIC и т.д.
UT передает направленный пилот-сигнал
AP принимает данные с использованием Uap(k)
AP принимает данные с использованием CCMI, MMSE, SIC и т.д.
Для направленного и для не направленного режимов приемник (точка доступа или терминал пользователя) может оценивать среднее принятое SNR для каждого широкополосного пространственного канала, например, усредняя принятые SNR (в dB) для NF поддиапазонов широкополосного пространственного канала. Широкополосный пространственный канал может соответствовать широкополосной собственной моде для направленного режима или передающей антенне для не направленного режима. Затем приемник вычисляет рабочее SNR для каждого широкополосного пространственного канала как сумму среднего принятого SNR плюс SNR фактора потери мощности. Затем приемник выбирает скорость для каждого широкополосного пространственного канала на основе рабочего SNR и таблицы поиска поддерживаемых скоростей и требуемых для них SNR.
Фиг. 3 изображает пространственную обработку в точке 110 доступа и терминале 120 пользователя для прямой и обратной линий связи для направленного режима в MIMO-системе WLAN. Для прямой линии связи в точке 110 доступа вектор символов данных sdn(k) умножается на матрицу U* ap(k) блоком 320 и дополнительно масштабируется матрицей коррекции Kap(k) блоком 322 для получения вектора символов передачи xdn(k) для прямой линии связи. В терминале 120 пользователя вектор принятых символов rdn(k) умножается на матрицу VT ut(k) блоком 360 и дополнительно масштабируется матрицей Σ-1(k) блоком 362 для получения вектора восстановленных символов данных  для прямой линии связи.
для прямой линии связи.
Для обратной линии связи в терминале 120 пользователя вектор символов данных sup(k) умножается на матрицу Vut(k) блоком 390 и дополнительно масштабируется матрицей коррекции Kut(k) модулем 392 для получения вектора символов передачи xup(k) для обратной линии связи. В точке 110 доступа принятый вектор символов rup(k) умножается на матрицу UH ap(k) блоком 340 и дополнительно масштабируется матрицей Σ-1(k) блоком 342 для получения вектора восстановленных символов данных  для обратной линии связи.
для обратной линии связи.
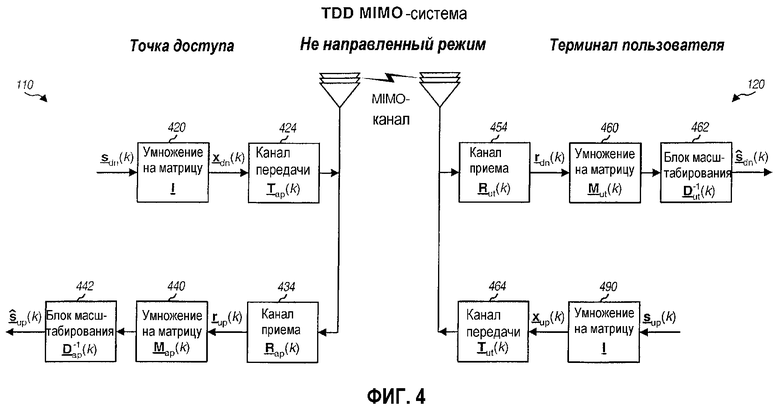
Фиг. 4 изображает пространственную обработку в точке 110 доступа и терминале 120 пользователя для передачи данных по прямой и обратной линиям связи для не направленного режима в MIMO-системе WLAN. Для прямой линии связи в точке 110 доступа вектор символов данных sdn(k) умножается на единичную матрицу I блоком 420 для получения вектора символов передачи xdn(k) для прямой линии связи. В терминале 120 пользователя принятый вектор символов rdn(k) умножается на матрицу пространственного фильтра Mut(k) блоком 460 и дополнительно масштабируется диагональной матрицей D-1 ut(k) блоком 462 для получения вектора восстановленных символов данных для прямой линии связи. Матрицы Mut(k) и
D-1 ut(k) выводятся на основе матрицы рабочих характеристик канала прямой линии связи Hedn(k) и c использованием CCMI, MMSE, SIC или некоторого другого способа.
Для обратной линии связи в терминале 120 пользователя вектор символов данных sup(k) умножается на единичную матрицу I блоком 490 для получения вектора символов передачи xup(k) для обратной линии связи. В точке 110 доступа принятый вектор символов rup(k) умножается на матрицу пространственного фильтра Map(k) блоком 440 и дополнительно масштабируется диагональной матрицей D-1 ap(k) блоком 442 для получения вектора восстановленных символов данных для обратной линии связи. Матрицы Map(k) и D-1 ap(k) выводятся на основе матрицы рабочих характеристик канала обратной линии связи Heup(k) и c использованием CCMI, MMSE, SIC или некоторого другого способа.
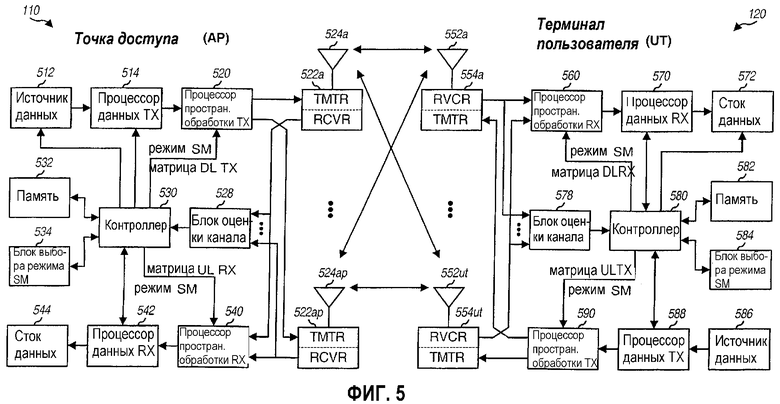
Фиг. 5 изображает блочную диаграмму точки 110 доступа и терминала 120 пользователя. На прямой линии связи, в точке 110 доступа, процессор 514 (для обработки) данных передачи (TX) принимает данные трафика из источника 512 данных и данные управления из контроллера 530. Процессор 514 данных TX обрабатывает (например, кодирует, перемежает и устанавливает соответствие символов) каждый из NS потоков данных на основе схем кодирования и модуляции, соответствующих скорости, выбранной для потока, для получения потока символов данных. Процессор 520 пространственной обработки TX принимает из процессора 514 данных TX NS потоков символов данных, выполняет пространственную обработку (как требуется) на символах данных, мультиплексирует в символы пилот-сигналов и подает на Nap антенны Nap потоков символов передачи. Обработка процессором 520 пространственной обработки TX зависит от того, выбран направленный или не направленный режим для использования, и может быть выполнена, как описано выше. Каждый блок 522 передатчика (TMTR) принимает и обрабатывает (например, модулирует OFDM и согласовывает) соответствующий поток символов передачи для формирования сигнала прямой линии связи. Nap блоков 522a передатчика через 522ap подают Nap сигналов прямой линии связи для передачи из Nap антенн 524a через 524ap, соответственно.
В терминале 120 пользователя Nut антенны 552a через 552ut принимают Nap сигналов прямой линии связи, и каждая антенна подает принятый сигнал в соответствующий блок 554 приемника (RCVR). Каждый блок 554 приемника выполняет обработку (например, согласование и демодуляцию OFDM), дополняющую для выполненной блоками 522 передатчика, и обеспечивает поток принятых символов. Процессор 560 пространственной обработки (RX) выполняет пространственную обработку на Nut потоках принятых символов из Nut блоков 554 приемника и обеспечивает NS потоков восстановленных символов данных. Обработка процессором 560 пространственной обработки RX зависит от того, выбран направленный или не направленный режим для использования, и может быть выполнена, как описано выше. Процессор 570 данных RX обрабатывает (например, устанавливает обратное соответствие, осуществляет обратное перемежение и декодирует) NS потоков восстановленных символов данных для получения NS потоков декодированных данных, которые могут быть поданы на сток 572 данных для хранения и/или в контроллер 580 для дальнейшей обработки.
Блок 578 оценки канала оценивает характеристику канала прямой линии связи на основе принятых символов пилот-сигнала и обеспечивает оценки канала, которые могут включать в себя оценки усиления канала, оценки SNR и так далее. Контроллер 580 принимает оценки канала, выводит матрицы, использованные процессором 560 пространственной обработки RX и процессором 590 пространственной обработки TX для пространственной обработки, и определяет соответствующую скорость для каждого потока символов данных, переданного по прямой линии связи. Скорости и данные обратной линии связи обрабатываются процессором 588 данных TX, пространственно обрабатываются (согласно требованиям) процессором 590 пространственной обработки TX, мультиплексируются с символами пилот-сигнала, согласуются Nut блоками 554a передатчика через 554ut и передаются через антенны 552a через 552ut.
В точке 110 доступа Nut переданных сигналов обратной линии связи принимаются антеннами 524, согласуются и демодулируются блоками 522 приемника и обрабатываются процессором 540 пространственной обработки RX и процессором 542 данных RX. Скорости подаются на контроллер 530 и используются для управления передачей данных по прямой линии связи.
Точка 110 доступа и терминал 120 пользователя могут выполнять подобную или разную обработку для передачи пилот-сигнала и данных обратной линии связи.
Контроллеры 530 и 580 управляют действием различных блоков обработки в точке 110 доступа и терминале 120 пользователя, соответственно. Блоки 534 и 584 выбора режимов SM выбирают соответствующий режим пространственного мультиплексирования для использования для точки 110 доступа и терминала 120 пользователя, соответственно, на основе различных факторов, таких как описаны выше. Блоки 532 и 582 памяти осуществляют хранение данных и программных кодов, используемых контроллерами 530 и 580, соответственно.
Фиг. 6 изображает блок-схему процесса 600 передачи и приема данных в MIMO-системе. Процесс 600 может выполняться терминалом пользователя и точкой доступа для передачи данных по прямой и обратной линиям связи.
Первоначально выбирается режим SM из нескольких поддерживаемых режимов SM, которые могут включать в себя направленный и не направленный режимы, описанные выше (этап 612). Выбор режима может основываться на статусе калибровки терминала, количестве данных для передачи, SNR и/или параметрах канала, возможности другого объекта, осуществляющего связь, и так далее. Выбранный режим SM также может изменяться в продолжение сеанса передачи данных.
Для передачи данных (блок 620) несколько потоков данных для первой линии связи (например, обратной линии связи) кодируются и модулируются, в соответствии с их выбранными скоростями, для получения нескольких потоков символов данных для первой линии связи (этап 622). Затем осуществляется пространственная обработка этих потоков символов данных, в соответствии с выбранным режимом SM, для получения нескольких потоков символов передачи для передачи из нескольких антенн и через первую линию связи (этап 624). Пространственная обработка передачи осуществляется с использованием матрицы направляющих векторов для направленного режима и единичной матрицы для не направленного режима.
Для приема данных (блок 630) осуществляется пространственная обработка, в соответствии с выбранным режимом SM, нескольких потоков принятых символов, полученных из нескольких антенн, для второй линии связи (например, прямой линии связи), для получения нескольких потоков восстановленных символов данных (этап 632). Пространственная обработка приема осуществляется с использованием матрицы собственных векторов для направленного режима и матрицы пространственного фильтра для не направленного режима. Матрица пространственного фильтра может быть выведена на основе CCMI, MMSE, SIC или некоторого другого способа. Затем потоки восстановленных символов данных демодулируются и декодируются, в соответствии с их выбранными скоростями, для получения нескольких потоков декодированных данных для второй линии связи (этап 634).
Передача данных в блоке 620 и прием данных в блоке 630 могут происходить одновременно или в разное время. Также передаются и принимаются пилот-сигналы и скорости для поддержания передачи и приема данных с выбранным режимом SM.
Многорежимный терминал и точка доступа, и способы передачи/приема данных, описанные здесь, могут быть реализованы различными средствами. Например, указанные объекты и способы могут быть реализованы в аппаратных средствах, программном обеспечении или в их комбинации. Для аппаратной реализации блоки обработки для указанных объектов и способов могут быть реализованы внутри одной или большего количества специализированных интегральных схем (СИС, ASIC), цифровых процессоров сигналов (ЦПС, DSP), цифровых устройств обработки сигналов (ЦУПС, DSPD), программируемых логических устройств (ПЛУ, PLD), программируемых пользователем вентильных матриц (ППВМ, FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных блоков, разработанных для выполнения описанных здесь функций, или их комбинации.
Для программной реализации описанные здесь способы могут быть реализованы модулями (например, процедурами, функциями и так далее), выполняющими описанные здесь функции. Программные коды могут храниться в блоке памяти (например, блоках памяти 532 и 582 на фиг. 5) и выполняться процессором (например, контроллерами 530 и 580). Блок памяти может быть реализован внутри процессора или быть внешним по отношению к процессору, в этом случае он может быть связанным с процессором посредством связи через различные средства, как известно в технике.
Заголовки включены здесь для ссылки на некоторые разделы и для их добавления в местоположение некоторых разделов. Указанные заголовки не предназначены для ограничения контекста понятий, описанных ниже, и эти понятия могут применяться в других разделах по всему описанию.
Описание раскрытых вариантов осуществления, приведенное выше, предоставлено для обеспечения возможности любому специалисту в данной области техники произвести или использовать настоящее изобретение. Для знающих технику очевидны различные модификации указанных вариантов осуществления, и определенные здесь общие принципы могут быть применены к другим вариантам осуществления, не удаляясь от сути и не выходя из контекста изобретения. Следовательно, настоящее изобретение предназначено для предоставления в широкой области, согласующейся с раскрытыми здесь принципами и новыми признаками, и не ограничивается раскрытыми здесь вариантами осуществления.
Изобретение относится к технике связи. Технический результат состоит в повышении эффективности использования терминала. Для этого в терминале пользователя, поддерживаются несколько режимов пространственного мультиплексирования (SM), таких как направленный режим и не направленный режим. Для передачи данных несколько потоков данных кодируются и модулируются в соответствии с их выбранными скоростями для получения нескольких потоков символов данных. Затем осуществляется пространственная обработка этих потоков, в соответствии с выбранным режимом SM (например, матрицей направляющих векторов для направленного режима и единичной матрицей для не направленного режима) для получения нескольких потоков символов передачи для передачи из нескольких антенн. Для приема данных осуществляется пространственная обработка нескольких потоков принятых символов, в соответствии с выбранным режимом SM (например, матрицей собственных векторов для направленного режима и матрицей пространственного фильтра для не направленного режима) для получения нескольких потоков восстановленных символов данных. 4 н. и 28 з.п. ф-лы, 6 ил., 7 табл.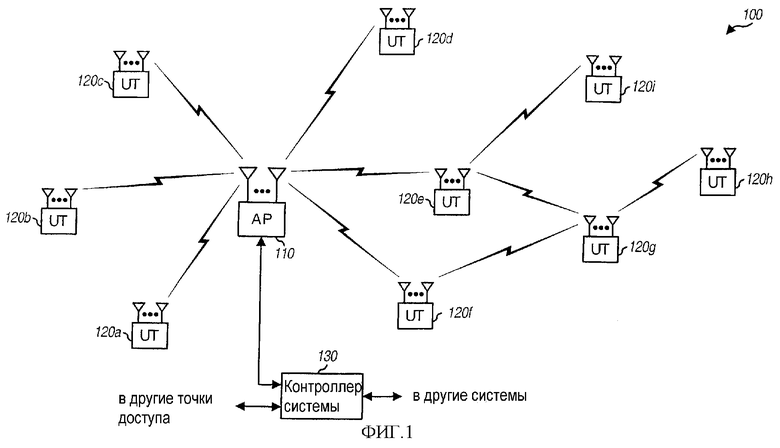
блок выбора режима, действующий для выбора режима пространственного мультиплексирования из нескольких режимов пространственного мультиплексирования, поддерживаемых терминалом, причем каждый из нескольких режимов пространственного мультиплексирования поддерживает одновременную передачу многих потоков символов данных через многие пространственные каналы MIMO-канала, сформированные несколькими антеннами в терминале,
процессор пространственной обработки передачи, действующий для пространственной обработки первых нескольких потоков символов данных, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков символов передачи для передачи из нескольких антенн и через первую линию связи, и
процессор пространственной обработки приема, действующий для пространственной обработки нескольких потоков принятых символов, полученных из нескольких антенн, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков восстановленных символов данных, которые являются оценками вторых нескольких потоков символов данных, переданных через вторую линию связи.
процессор пространственной обработки передачи является действующим для умножения первых нескольких потоков символов данных на матрицу направляющих векторов для направленного режима и на единичную матрицу для не направленного режима, и
процессор пространственной обработки приема является действующим для умножения нескольких потоков принятых символов на матрицу собственных векторов для направленного режима и на матрицу пространственного фильтра для не направленного режима.
блок оценки канала, действующий для оценки характеристики канала второй линии связи, и
контроллер, действующий для вывода матрицы пространственного фильтра на основе оцененной характеристики канала для второй линии связи.
процессор обработки данных передачи, действующий для кодирования и модуляции первых нескольких потоков данных, в соответствии с первыми несколькими скоростями, для получения первых нескольких потоков символов данных для первой линии связи, и
процессор данных приема, действующий для демодуляции и декодирования нескольких потоков восстановленных символов данных, в соответствии со вторыми несколькими скоростями, для получения нескольких потоков декодированных данных для второй линии связи.
пространственную обработку первых нескольких потоков символов данных, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков символов передачи для передачи из нескольких антенн и через первую линию связи, и
пространственную обработку нескольких потоков принятых символов, полученных из нескольких антенн, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков восстановленных символов данных, которые являются оценками вторых нескольких потоков символов данных, переданных через вторую линию связи.
средство выбора режима пространственного мультиплексирования из нескольких режимов пространственного мультиплексирования, причем каждый из нескольких режимов пространственного мультиплексирования поддерживает одновременную передачу многих потоков символов данных через многие пространственные каналы MIMO-канала,
средство пространственной обработки первых нескольких потоков символов данных, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков символов передачи,
средство передачи нескольких потоков символов передачи из нескольких антенн и через первую линию связи,
средство приема нескольких потоков принятых символов из нескольких антенн для второй линии связи, и
средство пространственной обработки нескольких потоков принятых символов, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков восстановленных символов данных, которые являются оценками вторые нескольких потоков символов данных, переданных через вторую линию связи.
средство оценки характеристики канала второй линии связи и
средство вывода матрицы пространственного фильтра на основе оцененной характеристики канала для второй линии связи.
блок выбора режима, действующий для выбора режима пространственного мультиплексирования из нескольких режимов пространственного мультиплексирования, поддерживаемых точкой доступа, причем каждый из нескольких режимов пространственного мультиплексирования поддерживает одновременную передачу многих потоков символов данных через многие пространственные каналы MIMO-канала, сформированные несколькими антеннами в точке доступа,
процессор пространственной обработки передачи, действующий для пространственной обработки первых нескольких потоков символов данных, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков символов передачи для передачи из нескольких антенн и через первую линию связи, и процессор пространственной обработки приема, действующий для пространственной обработки нескольких потоков принятых символов, полученных из нескольких антенн, в соответствии с выбранным режимом пространственного мультиплексирования, для получения нескольких потоков восстановленных символов данных, которые являются оценками вторых нескольких потоков символов данных, переданных через вторую линию связи.
процессор пространственной обработки приема является действующим для умножения нескольких потоков принятых символов на матрицу собственных векторов для направленного режима и на матрицу пространственного фильтра для не направленного режима.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ДОСТУПА АБОНЕНТСКИХ УСТРОЙСТВ К СИСТЕМЕ СВЯЗИ И СИСТЕМЫ СВЯЗИ К АБОНЕНТАМ, СПОСОБ ФУНКЦИОНИРОВАНИЯ УЗЛА СВЯЗИ В СИСТЕМЕ, СПОСОБ УПРАВЛЕНИЯ ДОСТУПОМ АБОНЕНТСКИХ УСТРОЙСТВ К СИСТЕМЕ СВЯЗИ, СИСТЕМА СВЯЗИ И УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ДОСТУПА К СИСТЕМЕ СВЯЗИ | 1994 |
|
RU2146418C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Устройство для контроля профиля сечений | 1982 |
|
SU1185048A1 |

