УРОВЕНЬ ТЕХНИКИ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в целом, относится к связи, и более конкретно - к способам выбора скоростей для передачи данных в системе связи со многими входами и многими выходами (МВМВ, MIMO).
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
MIMO-система использует для передачи данных множество (T) передающих антенн на передающей станции и множество (R) приемных антенн на принимающей станции. MIMO-канал, образованный посредством T передающих антенн и R приемных антенн, может быть разложен на S пространственных каналов, причем S<min{T,R}. S пространственных каналов могут использоваться для передачи данных параллельно, чтобы достигать более высокой производительности и/или избыточности для достижения более высокой надежности.
Каждый пространственный канал может испытывать на практике различные вредные условия канала, такие как, например, замирание, многолучевое распространение и влияние помех. S пространственных каналов могут испытывать на практике различные условия канала и могут достигать различных значений отношения (СШП, SNR) сигнала-к-шуму-и-помехе. SNR каждого пространственного канала определяет его способность передачи, которая обычно количественно (дискретно) определяется согласно конкретной скорости передачи данных, которая может надежно передаваться по пространственному каналу.
Выбор скорости передачи относится к процессу выбора подходящих скоростей для передачи данных, например, по пространственным каналам MIMO-канала. "Скорость передачи" может быть связана с конкретной скоростью передачи данных или скоростью передачи информационных битов, конкретной схемой кодирования или кодовой скоростью, конкретной схемой модуляции и так далее, чтобы использовать для потока данных. Для изменяемого во времени MIMO-канала условия канала изменяются во времени и значения SNR каждого пространственного канала также изменяются во времени. Различные SNR для различных пространственных каналов плюс изменяющийся во времени характер SNR для каждого пространственного канала усложняют выбор надлежащих скоростей передачи для пространственных каналов.
Следовательно, в области техники имеется потребность в способе для выбора скоростей передачи в MIMO-системе.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В настоящем документе описываются способы, предназначенные для выбора скоростей для передачи данных на собственных модах MIMO-канала. Собственную моду можно рассматривать в виде ортогонального пространственного канала, полученного путем разложения (декомпозиции) матрицы характеристик (откликов) канала для MIMO-канала. Способы могут использоваться для передачи данных по нисходящей линии связи от точки доступа (ТД, AP) на пользовательский терминал (ПТ, UT), передачи данных по восходящей линии связи от пользовательского терминала на точку доступа, и одноранговой передачи данных между двумя пользовательскими терминалами.
Согласно варианту осуществления изобретения описывается устройство, которое включает в себя канальный процессор и контроллер. Канальный процессор принимает пилот-сигнал (например, неуправляемый MIMO-пилот-сигнал) через первую линию связи (например, восходящую линию связи) и выводит оценку канала для первой линии связи. Контроллер принимает информацию обратной связи, указывающую качество канала второй линии связи (например, нисходящей линии связи), и выбирает скорости передачи для собственных мод второй линии связи на основании информации обратной связи и оценки канала.
Согласно другому варианту осуществления обеспечивается способ, в котором пилот-сигнал принимают через первую линию связи. Также принимается информация обратной связи, указывающая качество канала второй линии связи. Скорости передачи для собственных мод второй линии связи выбирают на основании информации обратной связи и пилот-сигнала.
Согласно следующему варианту осуществления описывается устройство, которое включает в себя средство для приема пилот-сигнала через первую линию связи, средство для приема информации обратной связи, указывающей качество канала второй линии связи, и средство для выбора скоростей передачи для собственных мод второй линии связи на основании информации обратной связи и пилот-сигнала.
Согласно очередному варианту осуществления обеспечивается способ, в котором первый неуправляемый MIMO-пилот-сигнал передается через нисходящую связь. Второй неуправляемый MIMO-пилот-сигнал и информацию обратной связи принимают через восходящую связь. Информация обратной связи указывает качество канала нисходящей связи, которое оценено на основании первого неуправляемого MIMO-пилот-сигнала. Скорости передачи для собственных мод нисходящей связи выбирают на основании информации обратной связи и второго неуправляемого MIMO-пилот-сигнала.
Согласно очередному варианту осуществления описывается устройство, которое включает в состав процессор пилот-сигнала, контроллер и пространственный процессор. Процессор пилот-сигнала формирует пилот-сигнал для передачи через первую линию связи. Контроллер посылает информацию обратной связи, указывающую качество канала второй линии связи. Пространственный процессор принимает передачу данных на собственных модах второй линии связи. Передачу данных посылают на скоростях передачи, выбранных на основании пилот-сигнала и информации обратной связи.
Согласно еще одному варианту осуществления обеспечивается способ, в котором пилот-сигнал передается через первую линию связи. Также посылается информация обратной связи, указывающая качество канала второй линии связи. Передачу данных, которая посылается на скоростях передачи, выбранных на основании пилот-сигнала и информации обратной связи, принимают на собственных модах второй линии связи.
Согласно очередному варианту осуществления описывается устройство, которое включает в себя средство для передачи пилот-сигнала через первую линию связи, средство для посылки информации обратной связи, указывающей качество канала второй линии связи, и средство для приема передачи данных на собственных модах для второй линии связи. Передачу данных посылают на скоростях передачи, выбранных на основании пилот-сигнала и информации обратной связи.
Различные аспекты и варианты осуществления изобретения подробно описываются ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - схема AP-инициированной передачи данных на собственных модах.
Фиг.2 - процесс осуществления передачи данных на собственных модах с низкими издержками.
Фиг.3 и 4 - две схемы AP-инициированной передачи данных на собственных модах с низкими издержками.
Фиг.5 - схема UT-инициированной передачи данных на собственных модах.
Фиг.6 - схема UT-инициированной передачи данных на собственных модах с низкими издержками.
Фиг.7 - процесс передачи данных на собственных модах с низкими издержками.
Фиг.8 - блок-схема узла доступа и пользовательского терминала.
ПОДРОБНОЕ ОПИСАНИЕ
Термин "примерный" используется в документе, чтобы означать "использующийся в качестве примера, экземпляра или иллюстрации". Любой вариант осуществления, описанный при этом в качестве "примерного", необязательно должен толковаться как предпочтительный или преимущественный перед другими вариантами осуществления.
Способы выбора скорости передачи, описанные в документе, могут использоваться для передачи данных по линиям нисходящей линии связи и восходящей линии связи. Нисходящая линия связи (или прямой канал) относится к линии связи от точки доступа на пользовательский терминал, и восходящая линия связи (или обратный канал) относится к линии связи от пользовательского терминала к точке доступа. Для ясности многое из нижеследующего описания предназначено для передачи данных нисходящей связи от точки доступа на пользовательский терминал. Точка доступа может также называться базовой станцией, базовой приемопередающей станцией и так далее. Пользовательский терминал также может называться мобильной станцией, пользовательским оборудованием, устройством беспроводной связи и так далее.
MIMO-канал нисходящей связи, образуемый T антеннами в точке доступа и R антеннами в пользовательском терминале, может быть описан посредством матрицы  откликов канала, имеющей размерность RxT, которая может быть выражена в виде:
откликов канала, имеющей размерность RxT, которая может быть выражена в виде:

причем элемент hi,j для i=1, ..., R и j=1, ..., T, является связностью или комплексным коэффициентом усиления между AP-антенной j и UT-антенной i. Для простоты полагают, что MIMO-канал будет с равномерным затуханием, и связность между каждой парой AP и UT антенн представлена с помощью одиночного комплексного коэффициента усиления hij.
Матрица  откликов канала может быть приведена к диагональному виду, чтобы получить S собственных мод или ортогональных пространственных каналов MIMO-канала нисходящей линии связи. Этой диагонализации можно достичь посредством выполнения либо разложения по сингулярным значениям, либо разложения по собственным значениям матрицы корреляции, которой является
откликов канала может быть приведена к диагональному виду, чтобы получить S собственных мод или ортогональных пространственных каналов MIMO-канала нисходящей линии связи. Этой диагонализации можно достичь посредством выполнения либо разложения по сингулярным значениям, либо разложения по собственным значениям матрицы корреляции, которой является  где
где  обозначает сопряженную транспонированную . Для ясности в нижеследующем описании используется разложение по сингулярным значениям. Разложение по сингулярным значениям для может быть выражено в виде:
обозначает сопряженную транспонированную . Для ясности в нижеследующем описании используется разложение по сингулярным значениям. Разложение по сингулярным значениям для может быть выражено в виде:

где  является унитарной матрицей RxR для левых собственных векторов ;
является унитарной матрицей RxR для левых собственных векторов ;
 является диагональной матрицей RxT сингулярных значений ; и
является диагональной матрицей RxT сингулярных значений ; и
 является унитарной матрицей TxT правых собственных векторов .
является унитарной матрицей TxT правых собственных векторов .
Унитарная матрица  описывается согласно свойству
описывается согласно свойству  где
где  является единичной матрицей. Столбцы унитарной матрицы являются ортогональными по отношению друг к другу, и каждый столбец имеет единичную мощность. Правые собственные векторы в
является единичной матрицей. Столбцы унитарной матрицы являются ортогональными по отношению друг к другу, и каждый столбец имеет единичную мощность. Правые собственные векторы в  могут использоваться для пространственной обработки, чтобы передавать данные на собственных модах
могут использоваться для пространственной обработки, чтобы передавать данные на собственных модах  Левые собственные векторы в могут использоваться для приемной пространственной обработки, чтобы восстанавливать передачу данных, посланную на собственных модах . Диагональная матрица содержит неотрицательные вещественные значения по диагонали и нули на других позициях. Эти диагональные элементы называются сингулярными (особыми) значениями и представляют коэффициент усиления канала для собственных мод. Разложение по сингулярным значениям описывает Gilbert Strang в "Linear Algebra and Its Applications" (Линейная алгебра и ее применения) во втором издании Academic Press, Second Edition, 1980.
Левые собственные векторы в могут использоваться для приемной пространственной обработки, чтобы восстанавливать передачу данных, посланную на собственных модах . Диагональная матрица содержит неотрицательные вещественные значения по диагонали и нули на других позициях. Эти диагональные элементы называются сингулярными (особыми) значениями и представляют коэффициент усиления канала для собственных мод. Разложение по сингулярным значениям описывает Gilbert Strang в "Linear Algebra and Its Applications" (Линейная алгебра и ее применения) во втором издании Academic Press, Second Edition, 1980.
Точка доступа выполняет пространственную обработку для собственного управления, как изложено ниже:

где  является вектором до S символов данных, подлежащих посылке на S собственных модах; и
является вектором до S символов данных, подлежащих посылке на S собственных модах; и
 является вектором с T символами передачи, подлежащими посылке от T AP-антенн.
является вектором с T символами передачи, подлежащими посылке от T AP-антенн.
Собственное управление относится к передаче данных на собственных модах MIMO-канала.
Как используется в документе, "символ данных" является символом модуляции, предназначенным для данных, "символ пилот-сигнала" является символом модуляции для пилот-сигнала, "символ передачи" является символом, подлежащим посылке от передающей антенны, "принятый символ" является символом, полученным от приемной антенны, и символ является комплексной величиной. Пилот-сигнал является передачей, которая известна априорно обеим станциям - и принимающей, и передающей. Пилот-сигнал также может называться зондирующим, обучающим (настроечным), опорной передачей, преамбулой и так далее. Для ясности в нижеследующем описании полагается, что на каждой собственной моде посылается один поток данных.
Принятые в пользовательском терминале символы могут быть выражены в виде:

где  является вектором с R принятыми символами от R UT-антенн;
является вектором с R принятыми символами от R UT-антенн;
 = • является эффективной матрицей откликов MIMO-канала для вектора ; и
= • является эффективной матрицей откликов MIMO-канала для вектора ; и
 является вектором шума.
является вектором шума.
Для простоты полагают, что шум будет аддитивным белым гауссовым шумом (АБГШ, AWGN) с вектором с нулевым средним и ковариационной матрицей  где
где  является дисперсией шума. Пользовательский терминал может восстанавливать переданные символы данных, используя различные методики приемной пространственной обработки, такие как методика полного указателя состояния канала (полного-CSI), методика минимальной среднеквадратической ошибки (МСКО, MMSE) и методика обращения в нуль (ZF) (незначащих коэффициентов в матрице).
является дисперсией шума. Пользовательский терминал может восстанавливать переданные символы данных, используя различные методики приемной пространственной обработки, такие как методика полного указателя состояния канала (полного-CSI), методика минимальной среднеквадратической ошибки (МСКО, MMSE) и методика обращения в нуль (ZF) (незначащих коэффициентов в матрице).
Пользовательский терминал может выводить матрицу пространственного фильтра на основании полного-CSI, MMSE или методики обращения в нуль, как изложено ниже:

где 
Пользовательский терминал может выполнять приемную пространственную обработку, как изложено ниже:

где  является матрицей пространственного фильтра, которая может быть равной
является матрицей пространственного фильтра, которая может быть равной  ,
,  ,
,  ;
;
 является вектором с наличием до S обнаруженных символов данных; и
является вектором с наличием до S обнаруженных символов данных; и
 является шумом после приемной пространственной обработки.
является шумом после приемной пространственной обработки.
Обнаруженные символы данных в являются оценками для переданных символов данных в  .
.
SNR для каждой собственной моды m, для m=1, ..., S, может быть выражено в виде:

где Pm является мощностью передачи, используемой для собственной моды m;
σm является сингулярным значением для собственной моды m, которая является m-ым диагональным элементом ;
qm является m-ым диагональным элементом  ; и
; и
rm - является m-ым диагональным элементом  .
.
SNRfci,m, SNRmmse,m, и SNRzf,m являются значением SNR для собственной моды m для способов полного-CSI, MMSE и обращения в нуль соответственно, и представлены в децибелах (дБ). Составляющую  часто называют принятым SNR. Составляющие SNRfci,m, SNRmmse,m, и SNRzf,m часто называют последетекторными SNR, которые являются значениями SNR после приемной пространственной обработки.
часто называют принятым SNR. Составляющие SNRfci,m, SNRmmse,m, и SNRzf,m часто называют последетекторными SNR, которые являются значениями SNR после приемной пространственной обработки.
Скорости передачи для собственных мод могут быть выбраны на основании значений SNR этих собственных мод. Выбор скорости передачи зависит от схемы выбора скорости передачи, поддерживаемой системой. В одной схеме выбора скорости передачи система позволяет, чтобы скорость передачи независимо выбиралась для каждой собственной моды на основании SNR этой собственной моды. Система может поддерживать набор скоростей, и каждая поддерживаемая скорость передачи может быть связана с конкретным минимальным SNR, требуемым для достижения указанного уровня рабочей характеристики, например, соответствующего 1% частоты (ЧОП, PER) появления ошибочных пакетов. Требуемый SNR для каждой поддерживаемой скорости передачи может быть получен посредством компьютерного моделирования, эмпирических измерений и так далее. Набор поддерживаемых скоростей и их требуемые SNR могут храниться в справочной таблице. SNR каждой собственной моды, SNRm, может сравниваться с требуемыми SNR для поддерживаемых скоростей, чтобы определить наивысшую скорость передачи Rm, поддерживаемую согласно этому SNRm. Скорость передачи Rm, выбранная для каждой собственной моды, связана с самой высокой скоростью передачи данных и требуемым SNR, которое меньше или равно SNRm, или SNRreq(Rm)≤SNRm.
В другой схеме выбора скорости передачи система позволяет, чтобы только некоторые комбинации скоростей использовались для передачи данных. Набор комбинаций скоростей передачи, разрешенных системой, часто называют набором с вектором квантованных скоростей передачи. Комбинация скоростей передачи может также называться схемой (СКМ, MCS) кодирования модуляции, или некоторой другой терминологией. Каждая разрешенная комбинация скоростей передачи связана с конкретным числом потоков данных для передачи, конкретной скоростью передачи для каждого потока данных и полной пропускной способностью (набором частот) для всех потоков данных. Значения SNR для собственных мод могут использоваться, чтобы выбрать одну из разрешенных комбинаций скоростей передачи.
Точка доступа использует нижеследующую информацию для передачи данных на собственных модах по MIMO-каналу нисходящей линии связи:
набор правых собственных векторов в ; и
набор скоростей для потоков данных, посылаемых на собственных модах.
Различные скорости передачи могут использоваться для различных собственных мод, поскольку эти собственные моды могут достигать различных SNR. Точка доступа может получать собственные векторы и скорости передачи для собственных мод различным образом.
В системе дуплексной (ДПВР, TDD) передачи с временным разделением нисходящая линия связи и восходящая линия связи совместно используют одну и ту же полосу частот, и можно полагать, что отклики канала нисходящей линии связи и восходящей линии связи будут обратными друг другу. То есть, если является матрицей откликов канала от антенной решетки X на антенную решетку Y, то взаимно-обратный канал имеет следствием, что связность от решетки Y на решетку X задается согласно  , где обозначает транспонирование
, где обозначает транспонирование  Однако отклики целей передачи и приема в точке доступа обычно отличаются от откликов цепей передачи и приема в пользовательском терминале. Может выполняться калибровка, чтобы получить матрицы коррекции, которые могут учитывать различия в откликах цепей передачи/приема на этих двух станциях. Применение матриц коррекции на этих двух станциях дает возможность, чтобы калиброванный отклик канала для одной линии связи был выражен в виде транспонирования калиброванного отклика канала для другой линии связи. Для простоты в нижеследующем описании полагается плоская частотная характеристика для цепей передачи/приема. Матрицей откликов канала нисходящей связи является
Однако отклики целей передачи и приема в точке доступа обычно отличаются от откликов цепей передачи и приема в пользовательском терминале. Может выполняться калибровка, чтобы получить матрицы коррекции, которые могут учитывать различия в откликах цепей передачи/приема на этих двух станциях. Применение матриц коррекции на этих двух станциях дает возможность, чтобы калиброванный отклик канала для одной линии связи был выражен в виде транспонирования калиброванного отклика канала для другой линии связи. Для простоты в нижеследующем описании полагается плоская частотная характеристика для цепей передачи/приема. Матрицей откликов канала нисходящей связи является  и матрицей откликов канала восходящей связи является
и матрицей откликов канала восходящей связи является  =.
=.
Разложение  и по сингулярным значениям может быть выражено в виде:
и по сингулярным значениям может быть выражено в виде:

где  является комплексно сопряженной для
является комплексно сопряженной для  Как показано в уравнении (12),
Как показано в уравнении (12),  и являются матрицами левого и правого собственных векторов
и являются матрицами левого и правого собственных векторов  и и
и и  являются матрицами левого и правого собственных векторов для .
являются матрицами левого и правого собственных векторов для .
Точка доступа выполняет пространственную обработку с помощью для передачи данных на собственных модах на пользовательский терминал. Пользовательский терминал выполняет приемную пространственную обработку с помощью  (или и ), чтобы восстановить передачу данных нисходящей связи. Одна станция может передавать неуправляемый MIMO-пилот-сигнал, который может использоваться другой станцией, чтобы получить оценку . Неуправляемый MIMO-пилот-сигнал является пилот-сигналом, состоящим из N передач пилот-сигналов, посланных от N антенн, где передача пилот-сигнала от каждой антенны является идентифицируемой посредством приемной станции. N=
(или и ), чтобы восстановить передачу данных нисходящей связи. Одна станция может передавать неуправляемый MIMO-пилот-сигнал, который может использоваться другой станцией, чтобы получить оценку . Неуправляемый MIMO-пилот-сигнал является пилот-сигналом, состоящим из N передач пилот-сигналов, посланных от N антенн, где передача пилот-сигнала от каждой антенны является идентифицируемой посредством приемной станции. N= для нисходящей связи неуправляемого MIMO-пилот-сигнала, посланного точкой доступа, и N=R для неуправляемого MIMO-пилот-сигнала восходящей связи, посланного пользовательским терминалом. Передающая станция может ортогонализировать передачи N пилот-сигналов в (1) кодовой области, используя различную ортогональную последовательность (например, последовательность Уолша) для каждой передачи пилот-сигнала, (2) частотной области путем посылки каждой передачи пилот-сигнала на другом частотном поддиапазоне, или (3) временной области путем посылки каждой передачи пилот-сигнала в другом временном интервале. В любом случае приемная станция способна получить оценку на основании неуправляемого MIMO-пилот-сигнала, принятого от передающей станции. Для простоты в нижеследующем описании полагается, что нет ошибок в оценке канала.
для нисходящей связи неуправляемого MIMO-пилот-сигнала, посланного точкой доступа, и N=R для неуправляемого MIMO-пилот-сигнала восходящей связи, посланного пользовательским терминалом. Передающая станция может ортогонализировать передачи N пилот-сигналов в (1) кодовой области, используя различную ортогональную последовательность (например, последовательность Уолша) для каждой передачи пилот-сигнала, (2) частотной области путем посылки каждой передачи пилот-сигнала на другом частотном поддиапазоне, или (3) временной области путем посылки каждой передачи пилот-сигнала в другом временном интервале. В любом случае приемная станция способна получить оценку на основании неуправляемого MIMO-пилот-сигнала, принятого от передающей станции. Для простоты в нижеследующем описании полагается, что нет ошибок в оценке канала.
Разложение по сингулярным значениям требует большого объема вычислений. Таким образом, может быть желательным, чтобы узел доступа выполнял разложение по сингулярным значениям, чтобы получать собственные векторы в  Узел доступа затем может передать управляемый MIMO-пилот-сигнал, который является пилотом-сигналом, посылаемым на собственных модах MIMO-канала. Управляемый MIMO-пилот-сигнал может быть сгенерирован, как изложено ниже:
Узел доступа затем может передать управляемый MIMO-пилот-сигнал, который является пилотом-сигналом, посылаемым на собственных модах MIMO-канала. Управляемый MIMO-пилот-сигнал может быть сгенерирован, как изложено ниже:

где  является правым собственным вектором для собственной моды m, который является m-ым столбцом ;
является правым собственным вектором для собственной моды m, который является m-ым столбцом ;
 является символом пилот-сигнала, переданным на собственной моде m; и
является символом пилот-сигнала, переданным на собственной моде m; и
 является вектором передачи для управляемого MIMO-пилот-сигнала для собственной моды m.
является вектором передачи для управляемого MIMO-пилот-сигнала для собственной моды m.
Точка доступа может передавать полный управляемый MIMO-пилот-сигнал на всех собственных модах в один или несколько (последовательных или непоследовательных) интервалах передачи символа.
Принятый управляемый MIMO-пилот-сигнал в пользовательском терминале может быть выражен как:

где  является принятым вектором для управляемого MIMO-пилот-сигнала для собственной моды m; и
является принятым вектором для управляемого MIMO-пилот-сигнала для собственной моды m; и
 является левым собственным вектором для собственной моды m, который является m-ым столбцом .
является левым собственным вектором для собственной моды m, который является m-ым столбцом .
Уравнение (14) показывает, что пользовательский терминал может получать на основании управляемого MIMO-пилот-сигнала от точки доступа (1) оценку , - один столбец за раз, и (2) оценку  - одно сингулярное значение
- одно сингулярное значение  за раз. Пользовательский терминал может получить оценки собственных векторов и сингулярных значений без необходимости выполнять разложение по сингулярным значениям.
за раз. Пользовательский терминал может получить оценки собственных векторов и сингулярных значений без необходимости выполнять разложение по сингулярным значениям.
Пользовательский терминал обычно выбирает скорости передачи для собственных мод MIMO-канала нисходящей линии связи и посылает выбранные скорости передачи обратно на точку доступа. Точка доступа обычно не может выбирать скорости передачи для MIMO-канала нисходящей связи на основании единственно MIMO-пилот-сигнала восходящей связи от пользовательского терминала из-за различных факторов, таких как, например, (1) различные уровни шума приемника в точке доступа и пользовательском терминале, (2) различные уровни помех, наблюдаемые точкой доступа и пользовательским терминалом, и/или (3) различных мощностей передачи, используемых для передачи MIMO-пилот-сигнала восходящей связи и данных нисходящей связи.
На Фиг.1 показан иллюстративный пилот-сигнал и схема 100 передачи данных, чтобы передавать данные на собственных модах MIMO-канала нисходящей связи. Временная диаграмма для точки доступа и временная диаграмма для пользовательского терминала необязательно вычерчены в масштабе по Фиг.1.
В начальной стадии точка доступа посылает на пользовательский терминал запрос пилот-сигнала, который может быть назван запросом пилот-сигнала (Pilot Req) или обучающим запросом (TRQ) (этап 110). Пользовательский терминал принимает запрос пилот-сигнала и в ответ передает неуправляемый MIMO-пилот-сигнал в зондирующем пакете (этап 112). Точка доступа принимает неуправляемый MIMO-пилот-сигнал, оценивает матрицу откликов канала H и осуществляет разложение  чтобы получить собственные векторы. Точка доступа затем передает управляемый MIMO-пилот-сигнал и запрос обратной связи по скорости, который может быть назван запросом скорости передачи (Rate Req) или запросом MCS (MRQ) (этап 114). Пользовательский терминал принимает управляемый MIMO-пилот-сигнал, оценивает SNR для каждой собственной моды на основании управляемого MIMO-пилот-сигнала и выбирает скорости передачи для собственных мод на основании значений SNR собственных мод. Пользовательский терминал затем посылает обратно выбранные скорости передачи для собственных мод (этап 116). Точка доступа от пользовательского терминала принимает выбранные скорости передачи, обрабатывает (например, кодирует и модулирует) данные на основании выбранных скоростей передачи и осуществляет пространственную обработку данных на основании собственных векторов. Точка доступа затем передает управляемые MIMO-пилот-сигналы и управляемые данные на пользовательский терминал (этап 118).
чтобы получить собственные векторы. Точка доступа затем передает управляемый MIMO-пилот-сигнал и запрос обратной связи по скорости, который может быть назван запросом скорости передачи (Rate Req) или запросом MCS (MRQ) (этап 114). Пользовательский терминал принимает управляемый MIMO-пилот-сигнал, оценивает SNR для каждой собственной моды на основании управляемого MIMO-пилот-сигнала и выбирает скорости передачи для собственных мод на основании значений SNR собственных мод. Пользовательский терминал затем посылает обратно выбранные скорости передачи для собственных мод (этап 116). Точка доступа от пользовательского терминала принимает выбранные скорости передачи, обрабатывает (например, кодирует и модулирует) данные на основании выбранных скоростей передачи и осуществляет пространственную обработку данных на основании собственных векторов. Точка доступа затем передает управляемые MIMO-пилот-сигналы и управляемые данные на пользовательский терминал (этап 118).
Схема 100 передачи дает возможность точке доступа передавать данные на надлежащих скоростях передачи на собственных модах без необходимости того, чтобы пользовательский терминал выполнял разложение по сингулярным значениям. Однако необходимы четыре служебных передачи для блоков 110-116 для того, чтобы передавать данные с наличием собственного управления в блоке 118. Эти четыре служебных передачи могут уничтожить (снизить) выигрыш в более высокой полной пропускной способности, достигнутой с помощью собственного управления. В качестве примера, для системы, в которой четыре служебных передачи требуют 264 микросекунд (мкс), при условии, что скоростью передачи необработанных данных с наличием собственного управления будет 140 Мбит/с, и при условии, что скорость передачи необработанных данных без собственного управления будет на 33% ниже, размер полезных данных должен превысить 8 килобайтов для того, чтобы скомпенсировать служебные сигналы, предназначенные для собственного управления. Для меньших размеров полезных данных рабочая характеристика лучше без собственного управления из-за более низких системных издержек.
На Фиг.2 показан процесс 200, предназначенный для передачи данных на собственных модах MIMO-канала нисходящей линии связи с низкими системными издержками. В начале точка доступа посылает запрос пилот-сигнала и информации обратной связи, например TRQ и MRQ (этап 212). Точка доступа также передает неуправляемый MIMO-пилот-сигнал нисходящей связи (DL), например, наряду с запросом пилот-сигнала и информации обратной связи (этап 214).
Пользовательский терминал принимает и обрабатывает неуправляемый MIMO-пилот-сигнал нисходящей связи и оценивает качество канала нисходящей связи, которое может быть определено количественно, как описано ниже (этап 216). Пользовательский терминал затем посылает на точку доступа информацию обратной связи, указывающую качество канала нисходящей связи (этап 218). Пользовательский терминал также передает неуправляемый MIMO-пилот-сигнал восходящей связи (UL), например, наряду с информацией обратной связи (этап 220).
Точка доступа принимает неуправляемый MIMO-пилот-сигнал восходящей связи, оценивает матрицу откликов канала на основании неуправляемого MIMO-пилот-сигнала и осуществляет разложение , чтобы получить собственные векторы и сингулярные значения для собственных мод (этап 222). Точка доступа также обрабатывает неуправляемый MIMO-пилот-сигнал восходящей связи и оценивает качество канала восходящей связи (этап 224). Точка доступа затем оценивает значения SNR для собственных мод на основании оцененного качества канала восходящей связи, сингулярных значений, и информации обратной связи от пользовательского терминала, как описано ниже (этап 226). Точка доступа выбирает скорости передачи для собственных мод на основании оцененных SNR для собственных мод (этап 228). Точка доступа затем обрабатывает (например, кодирует и модулирует) данные на основании выбранных скоростей передачи, чтобы получить символы данных (этап 230). Точка доступа выполняет пространственную обработку над символами данных с помощью собственных векторов , например, как показано в уравнении (3), и передает на пользовательский терминал управляемые данные и управляемый MIMO-пилот-сигнал нисходящей связи на собственных модах (этап 232). Точка доступа информирует пользовательский терминал о скоростях, используемых для текущей передачи данных нисходящей связи.
Пользовательский терминал принимает управляемый MIMO-пилот-сигнал нисходящей связи и оценивает эффективную матрицу  откликов канала (этап 234). Пользовательский терминал затем выполняет приемную пространственную обработку над данными передачи нисходящей связи с помощью , например, как показано в уравнениях (5)-(8) (этап 236). Пользовательский терминал обрабатывает (например, демодулирует и декодирует) обнаруженные символы данных на основании скоростей передачи, выбранных посредством точки доступа, чтобы получить декодированные данные (этап 238).
откликов канала (этап 234). Пользовательский терминал затем выполняет приемную пространственную обработку над данными передачи нисходящей связи с помощью , например, как показано в уравнениях (5)-(8) (этап 236). Пользовательский терминал обрабатывает (например, демодулирует и декодирует) обнаруженные символы данных на основании скоростей передачи, выбранных посредством точки доступа, чтобы получить декодированные данные (этап 238).
На Фиг.3 показана усовершенствованная схема 300 передачи пилот-сигнала и данных, которая может использоваться для процесса 200 по Фиг.2. Для схемы 300 точка доступа посылает запрос пилот-сигнала и информации обратной связи и неуправляемый MIMO-пилот-сигнал нисходящей связи в первой передаче служебных сигналов (этап 310). Первой передачей служебных сигналов может быть, например, сообщение «общего управления инициатора» (IAC) с установленными полями обучающего запроса (TRQ) и MCS-запроса (MRQ) (или IAC+TRQ+MRQ). Пользовательский терминал посылает неуправляемый MIMO-пилот-сигнал восходящей линии связи и информацию обратной связи во второй передаче служебных сигналов (этап 312). Второй передачей служебных сигналов может быть, например, сообщение «общего управления ответчика» (RAC) с установленным полем (MFB) обратной связи MCS, и дополнительно включающее в себя зондирующий пакет (или RAC+MFB+зондирующий пакет). Точка доступа затем передает управляемые MIMO-пилот-сигналы и управляемые данные на пользовательский терминал (этап 314).
Схема 300 передачи дает возможность точке доступа передавать данные на надлежащих скоростях передачи на собственных модах с использованием только двух служебных передач. Если сравнить схему 300 по Фиг.3 со схемой 100 по Фиг.1, то этапы 110 и 114 по Фиг.1 по существу объединены в блок 310 по Фиг.3, а этапы 112 и 116 по Фиг.1 по существу объединены в блок 312 по Фиг.3. Главным различием между двумя схемами является то, что пользовательский терминал посылает обратно (1) скорости передачи для собственных мод на этапе 116 (поскольку является доступным управляемый MIMO-пилот-сигнал) и (2) информацию обратной связи для MIMO-канала нисходящей связи на этапе 312 (поскольку является доступным неуправляемый MIMO пилот-сигнал). Для схемы 300 точка доступа выполняет дополнительную обработку, чтобы выбрать скорости передачи для передачи данных на собственных модах для нисходящей линии связи.
На этапе 214 по Фиг.2 и этапе 310 по Фиг.3 точка доступа посылает T передач пилот-сигналов от T AP-антенн для неуправляемого MIMO-пилот-сигнала нисходящей связи. Пользовательский терминал может оценивать SNR для каждой AP-антенны на основании передачи пилот-сигнала, принятой от этой AP-антенны. Значения SNR для T AP-антенн называются значениями SNR нисходящей связи и обозначаются как SNRdl,i для i=1, ..., T.
Пользовательский терминал может посылать информацию обратной связи в различных формах. В одном варианте осуществления информация обратной связи содержит дискретные значения SNR нисходящей линии связи. В другом варианте осуществления пользовательский терминал выводит среднее значение SNR нисходящей связи, как изложено ниже:

Информация обратной связи затем содержит дискретное значение SNRdl. Значения SNR нисходящей линии связи и среднее значение SNR нисходящей линии связи являются различными формами оценки SNR, предназначенной для нисходящей линии связи.
В следующем варианте осуществления пользовательский терминал выбирает набор скоростей на основании значений SNR нисходящей линии связи. Информация обратной связи содержит выбранные скорости передачи, которые могут рассматриваться в качестве грубых дискретных значений SNR нисходящей линии связи. В очередном варианте осуществления пользовательский терминал выбирает одиночную скорость передачи на основании среднего значения SNR нисходящей линии связи, и информация обратной связи содержит выбранную скорость передачи. В другом варианте осуществления пользовательский терминал выбирает комбинацию скоростей передачи на основании значений SNR нисходящей линии связи, и информация обратной связи содержит выбранную комбинацию скоростей передачи. В очередном варианте осуществления информация обратной связи содержит полную пропускную способность для выбранных скоростей или выбранной комбинации скорости передачи. В очередном варианте осуществления информация обратной связи содержит минимальный уровень шума или дисперсию  шума, наблюдаемую в пользовательском терминале.
шума, наблюдаемую в пользовательском терминале.
В еще одном варианте осуществления информация обратной связи содержит подтверждения (ACK) приема и/или отрицательного подтверждения (NAK) приема, посланные посредством пользовательского терминала для пакетов данных, принятых от точки доступа. Точка доступа может поддерживать контур управления мощностью, который корректирует целевое SNR для пользовательского терминала на основании принятых значений ACK/NAK. Точка доступа может использовать целевое SNR, чтобы выбирать подходящие скорости передачи для передачи по нисходящей линии связи, как описано ниже.
В целом, информация обратной связи может содержать любой тип информации, которая указывает качество канала нисходящей линии связи. Информация обратной связи может содержать информацию, посланную посредством одного или нескольких уровней, таким как физический уровень, канальный уровень и так далее.
Информация обратной связи может посылаться различным образом. В варианте осуществления информацию обратной связи посылают в сообщении, имеющем надлежащий формат и поля. Это сообщение может быть управляющим сообщением на уровне линии связи и может быть послано всякий раз, когда имеется информация обратной связи для посылки. В другом варианте осуществления информацию обратной связи посылают в одном или нескольких указанных полях кадра или пакета, например, на физическом уровне. Указанные поля могут быть доступными в каждом кадре или пакете, который передается, и могут быть установлены всякий раз, когда имеется информация обратной связи для посылки.
Точка доступа может выбирать скорости передачи для собственных мод различным образом, например, в зависимости от типа информации обратной связи, принятой от пользовательского терминала. Чтобы упростить выбор скорости передачи точкой доступа, может полагаться, что шум и помехи в пользовательском терминале будут приблизительно постоянными по размерности пространства, и также может полагаться, что шум и помехи в точке доступа будут приблизительно постоянными по всей размерности пространства.
В варианте осуществления значения SNR для собственных мод оценивают, как изложено ниже:
SNRfcsi,dl,m=SNRfcsi,ul,m-(SNRul-SNRdl)  Ур.(16)
Ур.(16)
где SNRdl является оценкой SNR для нисходящей линии связи;
SNRul является оценкой SNR для восходящей линии связи;
SNRfcsi,ul,m является SNR собственной моды m на восходящей линии связи; и
SNRfcsi,dl,m является оценкой SNR собственной моды m на нисходящей линии связи.
Значения SNR в уравнении (16) представлены все в децибелах. Точка доступа может получать SNRdl на основании информации обратной связи от пользовательского терминала и может получать SNRul на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи. Точка доступа может получить SNRfcsi,ul,m для каждой собственной моды посредством (1) разложения , чтобы получить сингулярные значения и (2) вычисления SNRfcsi,ul,m для m=1, ..., S, например, как показано в уравнении (9), где является дисперсией шума в точке доступа.
В другом варианте осуществления значения SNR собственных мод оценивают, как изложено ниже:
SNRfcsi,dl,m=SNRfcsi,ul,m-(SNRul-SNRdl)- SNRbo

 Ур.(17)
Ур.(17)
где SNRbo является коэффициентом потери мощности, используемым для учета ошибок оценки. Коэффициент потери мощности может быть выбран на основании различных рассмотрений, таких как, например, тип информации обратной связи (например, значения SNR или скоростей передачи), посланных пользовательским терминалом, «возраст» информации обратной связи и так далее.
В другом варианте осуществления информация обратной связи содержит одну или несколько скоростей, выбранных посредством пользовательского терминала. Точка доступа может преобразовывать скорости передачи в значения SNR и затем вычислять среднее значение SNR нисходящей линии связи на основании преобразованных значений SNR, как показано в уравнении (15). Точка доступа затем может использовать среднее значение SNR нисходящей линии связи, чтобы оценить значения SNR собственных мод, например, как показано в уравнении (16) или (17). В очередном варианте осуществления информация обратной связи содержит полную пропускную способность для нисходящей связи. Точка доступа может преобразовывать полную пропускную способность в полное SNR нисходящей связи. Точка доступа может также осуществлять вывод (получать) полного SNR восходящей линии связи и может использовать полные SNR нисходящей линии связи и восходящей линии связи, чтобы оценивать значения SNR собственных мод. В очередном варианте осуществления значения SNR собственных мод оценивают, как изложено ниже:

где ASYM (AP,UT) является параметром асимметричности, который указывает различие в принятом SNR в пользовательском терминале, когда точка доступа передает на пользовательский терминал на известном уровне мощности на известном канале. Например, точка доступа может быть оснащена четырьмя антеннами, передавать на 17 дБ/мВт и иметь коэффициент шума 6 дБ. Пользовательский терминал может быть оборудован двумя антеннами, передавать на 10 дБ/мВт и иметь коэффициент шума 10 дБ. Уровень (УПС, RSL) принятого сигнала, наблюдаемый в пользовательском терминале, когда точка доступа передает на полной мощности на канале без потерь, может быть вычислен в виде:

RSL, наблюдаемый в точке доступа, когда пользовательский терминал передает на полной мощности на канале без потерь, может быть вычислен в виде:

Параметр асимметричности ASYM(AP,UT) затем может быть вычислен как:

Параметр асимметричности также может быть определен на основании принятых значений SNR в точке доступа и пользовательском терминале, как изложено ниже:

где SNRap является оценкой SNR для восходящей линии связи, и SNRut является оценкой SNR для нисходящей линии связи.
Точка доступа может получить SNRap на основании неуправляемого MIMO-пилот-сигнала, принятого от пользовательского терминала. Точка доступа может получать SNRut на основании информации обратной связи (например, SNR, скорости передачи, ACK/NAK и так далее), посланной посредством пользовательского терминала. Например, SNRut может быть целевым SNR, который скорректирован на основании значений ACK/NAK, принятых от пользовательского терминала.
В целом, значения SNR собственных мод могут оцениваться различным образом на основании информации обратной связи и неуправляемого MIMO-пилот-сигнала восходящей связи, принятого от пользовательского терминала. Точка доступа для собственных мод выбирает скорости передачи на основании значений SNR собственных мод. Точка доступа может выбирать скорости передачи для каждой собственной моды на основании SNR этой собственной моды. Точка доступа также может выбирать комбинацию скоростей передачи на основании значений SNR всех собственных мод.
Для схемы 300 согласно Фиг.3 пользовательский терминал передает неуправляемый MIMO-пилот-сигнал и информацию обратной связи в одной передаче служебных сигналов. Пользовательский терминал также может посылать отдельно пилот-сигнал и информацию обратной связи.
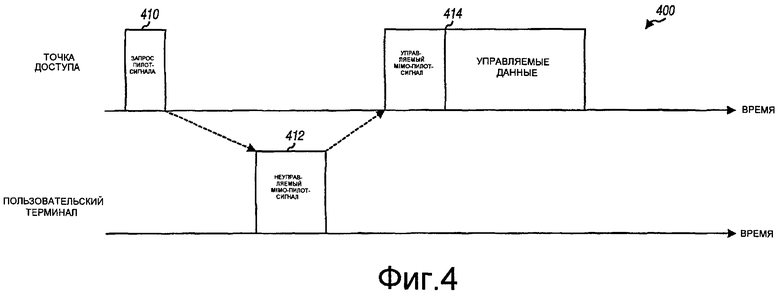
На Фиг.4 показана другая схема 400 передачи пилот-сигнала и данных для собственного управления по нисходящей линии связи с низкими системными издержками на передачу. Схема 400 может использоваться для сценария, в котором точка доступа уже имеет информацию обратной связи от пользовательского терминала, например, на основании предшествующей передачи данных на пользовательский терминал. Для схемы 400 точка доступа посылает запрос пилот-сигнала (этап 410). Пользовательский терминал принимает запрос пилот-сигнала и в ответ передает неуправляемый MIMO-пилот-сигнал восходящей линии связи (этап 412). Точка доступа оценивает матрицу откликов канала на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи, осуществляет разложение , чтобы получить собственные векторы и сингулярные значения, и вычисляет оценку SNR восходящей линии связи на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи. Точка доступа выбирает скорости передачи для собственных мод на основании сингулярных значений, оценки SNR восходящей связи и информации обратной связи, уже доступной в точке доступа. Точка доступа может использовать соответствующий коэффициент потери мощности в уравнении (17), чтобы учитывать «возраст» информации обратной связи. Например, прогрессивно более высокий коэффициент потери мощности может использоваться для прогрессивно более «старой» информации обратной связи. Точка доступа затем передает управляемые MIMO-пилот-сигналы и управляемые данные на пользовательский терминал (этап 414).
Схемы 100, 300 и 400 предназначены для передачи данных нисходящей линии связи, инициированной точкой доступа. Передача данных по нисходящей линии связи также может быть инициирована посредством пользовательского терминала.
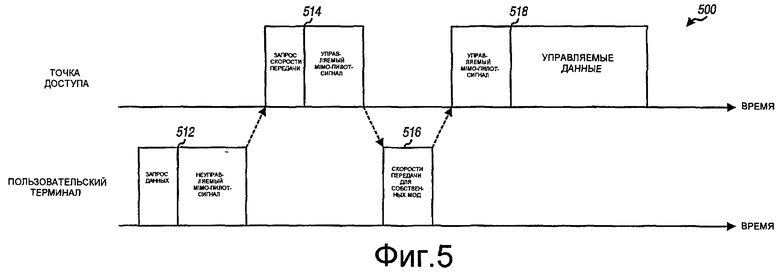
На Фиг.5 показана схема 500 передачи пилот-сигнала и данных для UT-инициированной передачи управляемых данных по нисходящей линии связи. В схеме 500 пользовательский терминал посылает запрос передачи данных нисходящей линии связи и неуправляемого MIMO-пилот-сигнала восходящей связи (этап 512). Точка доступа выводит собственные векторы на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи, посылает запрос пилот-сигнала и информации о скорости передачи, и передает управляемый MIMO-пилот-сигнал нисходящей линии связи (этап 514). Пользовательский терминал осуществляет оценку значений SNR собственных мод на основании управляемого MIMO-пилот-сигнала нисходящей линии связи, выбирает скорости передачи для собственных мод на основании значений SNR собственных мод и посылает выбранные скорости передачи (этап 516). Точка доступа обрабатывает данные на основании скоростей передачи, выбранных посредством пользовательского терминала и передает управляемый MIMO-пилот-сигнал нисходящей линии связи и управляемые данные на пользовательский терминал (этап 518). Схема 500 согласно Фиг.5 является подобной схеме 100 по Фиг.1, за исключением того, что в схеме 500 передача данных нисходящей линии связи инициирована по запросу данных, посылаемого пользовательским терминалом, а не по запросу пилот-сигнала, посылаемого в схеме 100 точкой доступа. Схема 500 требует трех служебных передач для поддержки собственного управления по нисходящей линии связи.
На Фиг.6 показана усовершенствованная схема 600 передачи пилот-сигнала и данных UT-инициированных передач управляемых данных по нисходящей линии связи с низкими системными издержками. В схеме 600 пользовательский терминал посылает запрос передачи данных нисходящей связи, неуправляемого MIMO-пилот-сигнала восходящей линии связи, и, возможно, информации обратной связи (этап 612). Информация обратной связи может содержать (1) минимальный уровень шума или дисперсию шумов, наблюдаемую пользовательским терминалом, (2) значения SNR собственных мод, оцененные в предшествующей передаче данных нисходящей линии связи, или (3) некоторую другую информацию, указывающую качество канала нисходящей линии связи. Точка доступа вычисляет собственные векторы и сингулярные значения на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи и выбирает скорости передачи для собственных мод на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи и информации обратной связи. Точка доступа затем обрабатывает данные на основании выбранных скоростей передачи и передает на пользовательский терминал управляемый MIMO-пилот-сигнал нисходящей связи и управляемые данные (этап 614). Схема 600 требует одиночной передачи служебных сигналов, чтобы поддерживать собственное управление на нисходящей связи.
Способы выбора скорости передачи могут использоваться для передачи данных нисходящей связи от точки доступа на пользовательский терминал, как описано выше. Эти способы также могут использоваться для передачи данных восходящей линии связи от пользовательского терминала к точке доступа и для одноранговой передачи данных, например от одного пользовательского терминала на другой пользовательский терминал. В целом, передающая станция может быть точкой доступа или пользовательским терминалом, и приемная станция также может быть точкой доступа или пользовательским терминалом. При использовании способов, описанных в документе, необходимо, чтобы только передающая станция выполняла разложение, и требуются низкие системные издержки для собственного управления.
На Фиг.7 показан процесс 700 для осуществления передачи данных на собственных модах при низких системных издержках. Пилот-сигнал (например, неуправляемый MIMO-пилот-сигнал) принимают через первую линию связи (например, восходящую линию связи) (этап 712). Принимают также информацию обратной связи, указывающую качество канала второй линии связи (например, нисходящей линии связи) (этап 714). Пилот-сигнал и информация обратной связи могут приниматься, исходя из одиночной передачи или многократных передач. Пилот-сигнал и информация обратной связи могут посылаться в ответ на запрос пилот-сигнала и информации обратной связи, как показано на Фиг.3, или могут посылаться наряду с запросом данных, как показано на Фиг.6. Информация обратной связи может быть вычислена на основании пилот-сигнала, переданного через вторую линию связи, как показано на Фиг.3. В любом случае скорости передачи для собственных мод второй линии связи выбирают на основании информации обратной связи и пилот-сигнала, принятого через первую линию связи, например, как описано выше для процесса 200 по Фиг.2 (этап 716). Данные обрабатывают на основании выбранных скоростей передачи и передают на собственных модах второй линии связи (этап 718).
Способы выбора скорости передачи, описанные в настоящем документе, могут использоваться для MIMO-систем с одной или многими несущими. Многие несущие могут обеспечиваться посредством мультиплексирования (МОЧР, OFDM) с ортогональным частотным разделением сигналов или некоторыми другими конструктивными решениями. OFDM эффективно делит полную пропускную способность системы на множество (K) ортогональных поддиапазонов, которые также называют тональными сигналами, поднесущими, элементами кодированного сигнала и частотными каналами. С наличием OFDM каждый поддиапазон связан с соответствующей поднесущей, которая может быть модулирована данными.
Для MIMO-системы, которая использует OFDM, матрица откликов канала (k) может быть получена для каждого поддиапазона k и разложена, чтобы получить собственные моды этого поддиапазона. Сингулярные значения в каждой диагональной матрице (k), для k=1, ..., K, могут быть упорядочены так, что первый столбец содержит наибольшее сингулярное значение, второй столбец содержит следующее по порядку наибольшее сингулярное значение и так далее, или σ1(k)≥σ2(k)≥...≥σs(k), где σm(k) является сингулярным значением в m-ом столбце (k) после упорядочения. Когда сингулярные значения в каждой матрице (k) являются упорядоченными, собственные векторы (или столбцы) матрицы (k) для этого поддиапазона также являются упорядоченными соответственно. Широкополосная собственная мода может быть определена в виде набора таким же образом упорядоченной собственной моды для всех K поддиапазонов после выполнения упорядочения, например, широкополосная собственная мода m включает в себя собственную моду m всех K поддиапазонов. Каждая широкополосная собственная мода связана с набором из K собственных векторов для K поддиапазонов. Выбор скорости передачи может быть выполнен для S широкополосных собственных мод, например, подобно описанному выше для MIMO-системы с одной несущей.
На Фиг.8 показана блок-схема точки 810 доступа и пользовательского терминала 850. В точке 810 доступа процессор 820 данных/пилот-сигнала принимает данные трафика от источника 812 данных, обрабатывает (например, кодирует, осуществляет перемежение и модулирует) данные трафика и обеспечивает символы данных. На каждой собственной моде может быть послан один поток данных, и каждый поток данных может быть кодирован и модулирован на основании скорости передачи, выбранной для этого потока/собственной моды. Процессор 820 также формирует символы пилот-сигнала для неуправляемого и управляемого MIMO-пилот-сигналов. Пространственный процессор 830 передачи данных (TX) выполняет пространственную обработку над символами данных и пилот-сигналов с помощью собственных векторов и выдает T потоков символов передачи на T передатчиков (передающих устройств) (TMTR) 832a-832t. Каждое передающее устройство 832 приводит в требуемое состояние соответственный поток символов передачи и формирует соответствующий модулированный сигнал. T модулированных сигналов от передающих устройств 832a-832t передаются от T антенн 834a-834t соответственно.
В пользовательском терминале 850 R антенн 852a-852r принимают модулированные сигналы, переданные посредством точки 810 доступа, и каждая антенна поставляет принятый сигнал на соответствующее устройство (RCVR) 854 приемника. Каждое устройство 854 приемника выполняет обработку, взаимно дополнительную (комплементарную) по отношению к таковой, выполняемой устройствами передатчика 832, и выдает принятые символы. Приемный (RX) пространственный процессор 860 выполняет пространственную согласованную (синхронизированную) фильтрацию над принятыми символами от всех R устройств 854 приемника на основании матрицы пространственного фильтра и выдает обнаруженные символы данных. Приемный RX-процессор 870 данных обрабатывает (например, демодулирует, осуществляет обратное перемежение и декодирует) обнаруженные символы данных и выдает декодированные данные.
Контроллеры 840 и 880 управляют действием различных устройств обработки в точке 810 доступа в пользовательском терминале 850 соответственно. Запоминающие устройства 842 и 882 хранят данные и программные коды, используемые контроллерами 840 и 880 соответственно.
Для выбора скорости передачи канальный процессор 878 оценивает качество канала нисходящей линии связи и обеспечивает оценку качества канала нисходящей линии связи. Контроллер 880 обеспечивает информацию обратной связи, указывающую качество канала нисходящей линии связи. Информация обратной связи и символы пилот-сигнала для неуправляемого MIMO-пилот-сигнала обрабатываются процессором 890 данных/пилот-сигнала и пространственным TX-процессором 892, чтобы сформировать R потоков символов передачи. R устройств 854a-854r передатчика приводят в требуемое состояние R потоков символов передачи и формируют R модулированных сигналов, которые посылаются через R антенн 852a-852r.
В точке доступа 810 модулированные сигналы от пользовательского терминала 850 принимаются посредством T антенн 834 и обрабатываются посредством T устройств приемников 832, чтобы получить принятые символы. Принятые символы дополнительно обрабатываются пространственным RX-процессором 844 и RX-процессором 842 данных, чтобы получить информацию обратной связи от пользовательского терминала 850. Канальный процессор 838 принимает неуправляемый MIMO-пилот-сигнал от пользовательского терминала 850 и вычисляет оценку канала для восходящей связи. Оценка канала может содержать матрицу откликов канала и оценку качества канала восходящей линии связи. Канальный процессор 838 осуществляет разложение , чтобы получить собственные векторы и сингулярные значения для собственных мод и выдает собственные векторы на пространственный TX-процессор 830. Контроллер 840 принимает оценку качества канала восходящей линии связи и сингулярные значения от канального процессора 838 и информацию обратной связи от RX-процессора 846 данных, оценивает значения SNR собственных мод, выбирает скорости передачи для собственных мод и подает выбранные скорости передачи на TX-процессор 820 данных.
Обработка для передачи данных на собственных модах MIMO-канала восходящей линии связи может быть выполнена способом, подобным вышеописанному для нисходящей линии связи.
Описанные в документе способы выбора скорости передачи могут быть осуществлены с помощью различных средств. Например, эти способы могут быть реализованы в виде аппаратных средств, программного обеспечения, или их комбинации. Для аппаратной реализации различные устройства в точке доступа могут быть осуществлены в рамках одной или нескольких единиц проблемно-ориентированных интегральных микросхем (ПОИМ, ASIC), цифровых процессоров (ЦПС, DSP), устройств (УЦОС, DSPD) цифровой обработки сигналов, программируемых логических устройств (ПЛУ, PLD), программируемых вентильных матриц (ПВМ, FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, электронных устройств, других электронных устройств, разработанных для выполнения функций, описанных в документе, или их комбинации. Различные устройства в пользовательском терминале также могут быть реализованы в рамках одной или нескольких единиц ASIC, DSP, процессоров и так далее.
Для программной реализации выполнения способы могут быть осуществлены с помощью модулей (например, процедур, функций и так далее), которые выполняют функции, описанные в документе. Программные коды могут храниться в запоминающем устройстве (например, запоминающем устройстве 842 или 882 на Фиг.8) и исполняться посредством процессора (например, контроллера 840 или 880). Запоминающее устройство может быть реализовано в процессоре или может быть внешним для процессора, в каковом случае оно может быть связно соединено с процессором через различные средства, как известно в области техники.
Предшествующее описание раскрытых вариантов осуществления представлено, чтобы дать возможность любому специалисту в данной области техники создавать или использовать настоящее изобретение. Различные модификации для этих вариантов осуществления будут без труда очевидны специалистам в данной области техники, и общие принципы, определенные в данном документе, могут применяться к другим вариантам осуществления без выхода за рамки существа или объема изобретения. Таким образом, не подразумевается, что настоящее изобретение ограничивается вариантами осуществления, показанными в документе, а должно соответствовать самому широкому объему, совместимому с принципами и признаками новизны, раскрытыми в документе.





Изобретение относится к способам выбора скоростей для передачи данных в системе связи со многими входами и многими выходами (MIMO). Техническим результатом является обеспечение простого и эффективного способа выбора скоростей передачи в MIMO-системе. Указанный технический результат достигается тем, что точка доступа передает неуправляемый MIMO-пилот-сигнал через нисходящую линию связь. Пользовательский терминал осуществляет оценку качества канала нисходящей линии связи на основании неуправляемого MIMO-пилот-сигнала нисходящей линии связи и передает неуправляемый MIMO-пилот-сигнал и информацию обратной связи, указывающую качество канала нисходящей линии связи. Точка доступа осуществляет оценку качества канала восходящей линии связи и получает матрицу откликов канала на основании неуправляемого MIMO-пилот-сигнала восходящей линии связи, осуществляет разложение матрицы откликов канала, чтобы получить собственные векторы и коэффициент усиления канала для собственных мод нисходящей линии связи, и выбирает скорости передачи для собственных мод на основании оценки качества канала восходящей линии связи, коэффициента усиления канала для собственных мод и информации обратной связи. Точка доступа обрабатывает данные на основании выбранных скоростей передачи и передает управляемые данные и управляемый MIMO-пилот-сигнал на собственных модах с помощью собственных векторов. 8 н. и 25 з.п. ф-лы, 8 ил.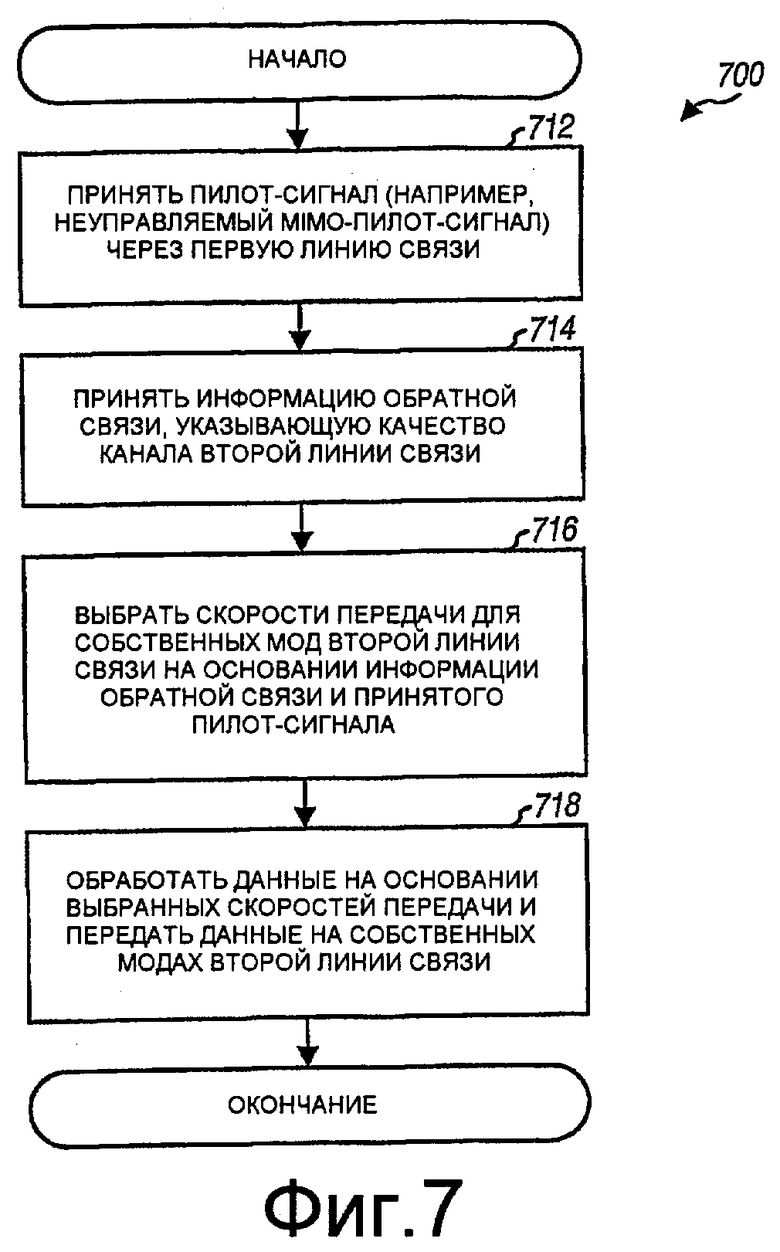
1. Устройство выполнения выбора скорости передачи, содержащее: канальный процессор, чтобы принимать первый пилот-сигнал через первую линию связи между упомянутым устройством и беспроводной станцией и вычислять оценку канала для первой линии связи, причем канальный процессор оценивает качество канала первой линии связи на основании первого пилот-сигнала; и контроллер, чтобы принимать информацию обратной связи, указывающую качество канала второй линии связи между упомянутым устройством и упомянутой беспроводной станцией, и выбирать скорости передачи для собственных мод второй линии связи на основании информации обратной связи и оценки канала, причем контроллер оценивает значения отношения сигнала к шуму и помехе (SNR) собственных мод на основании оценки качества канала первой линии связи и информации обратной связи и дополнительно выбирает скорости передачи для собственных мод на основании значений SNR собственных мод.
2. Устройство по п.1, в котором контроллер посылает запрос пилот-сигнала и информацию обратной связи, и при этом первый пилот-сигнал и информация обратной связи посылаются в ответ на запрос.
3. Устройство по п.1, дополнительно содержащее: процессор пилот-сигнала, чтобы формировать второй пилот-сигнал для передачи через вторую линию связи, и при этом информация обратной связи вычисляется на основании второго пилот-сигнала.
4. Устройство по п.1, в котором канальный процессор получает матрицу откликов канала и оценку значения SNR для первой линии связи на основании первого пилот-сигнала и осуществляет разложение матрицы откликов канала, чтобы получить коэффициенты усиления канала для собственных мод, и при этом контроллер оценивает значения SNR собственных мод на основании коэффициентов усиления канала для собственных мод, оценки значения SNR для первой линии связи и информации обратной связи.
5. Устройство по п.1, в котором контроллер выбирает скорость передачи для каждой собственной моды на основании значения SNR собственной моды.
6. Устройство по п.1, в котором контроллер выбирает комбинацию скоростей передачи для собственных мод на основании значений SNR собственных мод.
7. Устройство по п.1, в котором информация обратной связи содержит оценку значения отношения SNR для второй линии связи.
8. Устройство по п.1, в котором информация обратной связи содержит по меньшей мере одну скорость передачи или полную пропускную способность для второй линии связи.
9. Устройство по п.1, в котором информация обратной связи содержит подтверждения или отрицательные подтверждения для пакетов данных.
10. Устройство по п.1, в котором первый пилот-сигнал и информация обратной связи принимаются из одиночной передачи, посланной через первую линию связи.
11. Устройство по п.1, в котором информация обратной связи принимается для предшествующей передачи данных, посланной через вторую линию связи.
12. Устройство по п.1, дополнительно содержащее: процессор данных, чтобы обрабатывать данные на основании скоростей передачи, выбранных для собственных мод; и пространственный процессор, чтобы осуществлять пространственную обработку данных для передачи на собственных модах.
13. Устройство выполнения выбора скорости передачи, содержащее:
канальный процессор, чтобы принимать первый пилот-сигнал через первую линию связи и вычислять оценку канала для первой линии связи; и контроллер, чтобы принимать информацию обратной связи, указывающую качество канала второй линии связи и выбирать скорости передачи для собственных мод второй линии связи на основании информации обратной связи и оценки канала, причем первый пилот-сигнал является неуправляемым пилот-сигналом системы со многими входами и многими выходами (MIMO), посылаемым от первого множества антенн и принимаемым через второе множество антенн.
14. Способ выполнения выбора скорости передачи посредством первой беспроводной станции, содержащий этапы, на которых: принимают первый пилот-сигнал через первую линию связи между первой беспроводной станцией и второй беспроводной станцией и оценивают качество канала первой линии связи на основании первого пилот-сигнала; принимают информацию обратной связи, указывающую качество канала второй линии связи между первой беспроводной станцией и второй беспроводной станцией; оценивают значения отношения сигнала к шуму и помехе (SNR) собственных мод на основании оценки качества канала первой линии связи и информации обратной связи; и выбирают скорости передачи для собственных мод второй линии связи на основании информации обратной связи и значений SNR собственных мод.
15. Способ по п.14, дополнительно содержащий этапы, на которых: посылают запрос пилот-сигнала и информации обратной связи, и при этом первый пилот-сигнал и информацию обратной связи посылают в ответ на запрос.
16. Способ по п.14, дополнительно содержащий этапы, на которых: передают второй пилот-сигнал через вторую линию связи, и при этом информацию обратной связи вычисляют на основании второго пилот-сигнала.
17. Способ по п.14, в котором оценивание значений SNR собственных мод содержит этапы, на которых: получают матрицу откликов канала для первой линии связи на основании первого пилот-сигнала, осуществляют разложение матрицы откликов канала, чтобы получить коэффициенты усиления канала для собственных мод, и вычисляют значения SNR собственных мод на основании коэффициентов усиления канала для собственных мод, оценки качества канала первой линии связи и информации обратной связи.
18. Устройство выполнения выбора скорости передачи, содержащее: средство приема первого пилот-сигнала через первую линию связи между упомянутым устройством и станцией и оценки качества канала первой линии связи на основании первого пилот-сигнала; средство приема информации обратной связи, указывающей качество канала для второй линии связи между упомянутым устройством и упомянутой станцией; средство оценки значений отношения сигнала к шуму и помехе (SNR) собственных мод второй линии связи на основании оценки качества канала первой линии связи и информации обратной связи; и средство выбора скоростей для собственных мод второй линии связи на основании информации обратной связи и значений SNR собственных мод.
19. Устройство по п.18, дополнительно содержащее: средство посылки запроса пилот-сигнала и информации обратной связи, и при этом первый пилот-сигнал и информация обратной связи посылаются в ответ на запрос.
20. Устройство по п.18, дополнительно содержащее: средство передачи второго пилот-сигнала через вторую линию связи, и при этом информация обратной связи вычисляется на основании второго пилот-сигнала.
21. Устройство по п.18, в котором средство оценки значений SNR собственных мод содержит средство получения матрицы откликов канала для первой линии связи на основании первого пилот-сигнала, средство разложения матрицы откликов канала, чтобы получить коэффициенты усиления канала для собственных мод, и средство вычисления значений SNR собственных мод на основании коэффициентов усиления канала для собственных мод, оценки качества канала первой линии связи и информации обратной связи.
22. Способ выполнения выбора скорости передачи в системе связи со многими входами и многими выходами (MIMO), содержащий этапы, на которых: передают первый неуправляемый MIMO-пилот-сигнал через нисходящую линию связи; принимают второй неуправляемый MIMO-пилот-сигнал и информацию обратной связи через восходящую линию связи, при этом информация обратной связи указывает качество канала нисходящей линии связи, оцененное на основании первого неуправляемого MIMO-пилот-сигнала; и выбирают скорости передачи для собственных мод нисходящей линии связи на основании информации обратной связи и второго неуправляемого MIMO-пилот-сигнала.
23. Способ по п.22, в котором выбор скоростей передачи для собственных мод нисходящей линии связи содержит этапы, на которых: оценивают качество канала восходящей линии связи на основании второго неуправляемого MIMO-пилот-сигнала, получают матрицу откликов канала для восходящей линии связи на основании второго неуправляемого MIMO-пилот-сигнала, осуществляют разложение матрицы откликов канала, чтобы получить коэффициенты усиления канала для собственных мод, оценивают значения отношения SNR собственных мод на основании оценки качества канала восходящей линии связи, коэффициентов усиления канала для собственных мод и информации обратной связи, и выбирают скорости передачи для собственных мод на основании значений SNR собственных мод.
24. Устройство выполнения выбора скорости передачи, содержащее: процессор пилот-сигнала, чтобы формировать первый пилот-сигнал для передачи через первую линию связи между упомянутым устройством и станцией; контроллер, чтобы посылать информацию обратной связи, указывающую качество канала второй линии связи между упомянутым устройством и упомянутой станцией; и пространственный процессор, чтобы принимать передачу данных на собственных модах второй линии связи, при этом передача данных посылается на скоростях передачи, выбранных на основании первого пилот-сигнала и информации обратной связи.
25. Устройство по п.24, в котором контроллер принимает запрос пилот-сигнала и информации обратной связи и посылает первый пилот-сигнал и информацию обратной связи в ответ на запрос.
26. Устройство по п.24, дополнительно содержащее: канальный процессор, чтобы принимать второй пилот-сигнал через вторую линию связи и вычислять оценку значения отношения сигнала к шуму и помехе (SNR) для второй линии связи на основании второго пилот-сигнала, и при этом контроллер формирует информацию обратной связи на основании оценки значения SNR.
27. Устройство по п.24, в котором процессор пилот-сигнала формирует первый пилот-сигнал в виде неуправляемого пилот-сигнала системы со многими входами и многими выходами (МIМО), пригодного для передачи от множества антенн.
28. Способ выполнения выбора скорости передачи, содержащий этапы, на которых: передают первый пилот-сигнал через первую линию связи; посылают информацию обратной связи, указывающую качество канала второй линии связи; и принимают передачу данных на собственных модах второй линии связи, при этом передачу данных посылают на скоростях передачи, выбранных на основании первого пилот-сигнала и информации обратной связи.
29. Способ по п.28, дополнительно содержащий этап, на котором: принимают запрос пилот-сигнала и информации обратной связи, и при этом первый пилот-сигнал и информацию обратной связи посылают в ответ на запрос.
30. Способ по п.28, дополнительно содержащий этапы, на которых: принимают второй пилот-сигнал через вторую линию связи; вычисляют оценку значения отношения сигнала к шуму и помехе (SNR) для второй линии связи на основании второго пилот-сигнала; и формируют информацию обратной связи на основании оценки значения SNR.
31. Устройство выполнения выбора скорости передачи, содержащее: средство передачи первого пилот-сигнала через первую линию связи между упомянутым устройством и станцией; средство посылки информации обратной связи, указывающей качество канала второй линии связи между упомянутым устройством и упомянутой станцией; и средство приема передачи данных на собственных модах второй линии связи, при этом передача данных посылается на скоростях передачи, выбранных на основании первого пилот-сигнала и информации обратной связи.
32. Устройство по п.31, дополнительно содержащее: средство приема запроса пилот-сигнала и информации обратной связи, и при этом первый пилот-сигнал и информация обратной связи посылается в ответ на запрос.
33. Устройство по п.31, дополнительно содержащее: средство приема второго пилот-сигнала через вторую линию связи; средство вычисления оценки значения отношения сигнала к шуму и помехе (SNR) для второй линии связи на основании второго пилот-сигнала; и средство формирования информации обратной связи на основании оценки значения SNR.
| US 2004136349 A1, 15.07.2007 | |||
| WO 2004038985 A2, 06.05.2004 | |||
| US 6433737 B2, 13.08.2002 | |||
| WO 2004002047 A1, 31.12.2003 | |||
| US 6785341 B2, 31.08.2004 | |||
| US 6141567 A, 31.10.2000 | |||
| US 6131016 A, 10.10.2000 | |||
| УСТРОЙСТВО МОБИЛЬНОЙ СВЯЗИ С МНОЖЕСТВОМ ПЕРЕДАЮЩИХ И ПРИЕМНЫХ АНТЕНН И СООТВЕТСТВУЮЩИЙ СПОСОБ МОБИЛЬНОЙ СВЯЗИ | 2003 |
|
RU2238611C1 |
| БЫСТРОДЕЙСТВУЮЩЕЕ УПРАВЛЕНИЕ МОЩНОСТЬЮ В МОБИЛЬНОЙ СИСТЕМЕ СВЯЗИ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ С ПЕРЕМЕННОЙ СКОРОСТЬЮ ПЕРЕДАЧИ ДАННЫХ | 1996 |
|
RU2193820C2 |
| RU 2003135853 A, 20.04.2005. | |||

