Изобретение относится к лазерной дальнометрии и может быть использовано для измерения расстояний до различных объектов на транспорте, в строительстве, машиностроении и других областях.
Известны лазерные дальномеры времяпролетного типа, в которых расстояние до объекта определяется по времени запаздывания отраженного от объекта светового сигнала [1]. Недостатком таких дальномеров является невысокая точность.
Известны лазерные дальномеры, измеряющие расстояние до объекта по изменению фазы непрерывного модулированного светового сигнала при прохождении им двойного измеряемого расстояния [2, 3]. Они характеризуются сложностью схемной реализации, которая увеличивается при повышении требований к точности измерений.
Известны также лазерные дальномеры, в которых расстояние до объекта определяется по изменению частоты отраженного сигнала [4, 5]. Основной недостаток дальномеров указанного типа обусловлен нелинейной частотной характеристикой источника излучения, что, в конечном итоге, ограничивает предельно достижимую точность измерений.
Наиболее близким устройством к заявляемому техническому решению является лазерный дальномер, включающий источник излучения, выполненный в виде полупроводникового лазера, канал управления источником излучения, содержащий генератор импульсов тока накачки и инвертор, канал калибровки, выполненный в виде поворотной призмы для ввода части излучения в устройство сравнения эталонного и отраженного сигналов, канал измерения, фотоприемник, частотомер и блок обработки данных [6]. Расстояние до объекта в указанном устройстве определяется по частоте следования световых импульсов, генерируемых лазером, значение которой зависит от расстояния до объекта, и по частоте калибровочного сигнала, соответствующей некоторому калиброванному расстоянию.
Недостатком указанного дальномера, принятого за прототип, является ограниченный динамический диапазон (диапазон измеряемого расстояния до объекта). Минимальная величина измеряемого расстояния составляет не менее 1 м, так как практически дальномер не может работать на частотах выше 150 МГц. Это обусловлено следующим. Измеряемая в указанном дальномере эталонная частота Fo (частота калибровки), соответствующая некоторому известному (калиброванному) расстоянию Lo, обратно пропорциональна суммарному времени распространения сигнала в оптическом тракте (поворотной призме) - τ0, и во внутренних электрических цепях - τсх. Значение τсх можно оценить в 1 мкс, что соответствует некоторой эквивалентной длине Lэкв cx, которая в известном устройстве значительно больше калиброванного расстояния Lo, равного пути, проходимому светом в поворотной призме. Малая величина Lo обусловлена фактическим отсутствием в канале калибровки оптической линии задержки, поскольку поворотная призма ввиду своей малой длины (а реализовать указанный дальномер с поворотной призмой достаточно большой длины не представляется возможным) не может рассматриваться как линия задержки. Поэтому при процедуре калибровки, проводимой в устройстве-прототипе и заключающейся в измерении частоты Fo, соответствующей некоторому расстоянию Lo, даже при допущении, что τ0<<τсх, погрешность измерения частоты Fo и, соответственно, измеряемого расстояния будет определяться, по крайней мере, значением τ0.
Отметим, что выбор больших значений Fo нецелесообразен, поскольку при этом затрудняется реализация схемной части дальномера.
Отсутствие задержки отраженного от объекта сигнала в канале измерения может приводить к ситуации, когда при небольшой величине измеряемого расстояния частота отраженного от объекта сигнала Fc будет практически равна эталонной частоте Fo, что, в свою очередь, приведет к ухудшению точности измерений.
Максимальное измеряемое расстояние в известном дальномере определяется мощностью полупроводникового лазера, а другой тип лазера, например газоразрядный или твердотельный лазер, не представляется возможным использовать из-за сложности управления источником накачки на высоких частотах (около 10 МГц). Схема управления лазерным генератором в известном устройстве практически применима только к полупроводниковым лазерам, питание которых осуществляется невысоким напряжением (до 5 В). При включении и выключении, например, газоразрядного лазера приведенная схема управления неприменима, так как коммутация высоковольтного напряжения порядка 10-15 кВ с частотой несколько десятков мегагерц является очень сложной технической задачей.
Техническим результатом заявляемого устройства является расширение динамического диапазона лазерного дальномера с сохранением высокой точности измерений.
Указанный технический результат достигается тем, что лазерный дальномер, включающий источник излучения, генерирующий световые импульсы с эталонной частотой Fo и сигнальной частотой Fc, канал калибровки, канал измерения, фотоприемник, частотомер, канал управления источником излучения, содержащий инвертор и блок управления и питания, и блок обработки данных, при этом выход фотоприемника подсоединен к входам инвертора и частотомера, выход инвертора связан с первым входом блока управления и питания, а выход частотомера подключен к блоку обработки данных, снабжен первой оптической линией задержки, размещенной в канале калибровки, второй оптической линией задержки, размещенной в канале измерения, первым оптическим затвором, установленным в канале калибровки, вторым оптическим затвором, установленным в канале измерения, и таймером, при этом первый и второй выходы таймера подсоединены, соответственно, к первому и второму оптическим затворам, третий выход подключен ко второму входу блока управления и питания, первая и вторая оптические линии задержки выполнены в виде волоконных световодов, длины которых Lo и Lc, соответственно, выбираются из условия

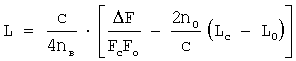
а частоты Fc и Fo связаны с измеряемым расстоянием L соотношением

где с - скорость света, ΔF=Fc-Fo, n0 - показатель преломления световодов, nв - показатель преломления воздуха.
Источник излучения выполнен в виде лазера с модулированной амплитудой излучения.
Лазерный дальномер снабжен светоделительной пластиной, расположенной между источником излучения и первой оптической линией задержки.
Канал измерения снабжен приемной оптической системой для фокусировки отраженного от объекта излучения во вторую оптическую линию задержки, при этом приемная оптическая система выполнена в виде линзы со сквозным осевым отверстием, а входная линза второй оптической линии задержки расположена на оптической оси приемной оптической системы.
Волоконные световоды снабжены входными и выходными линзами.
Инвертор выполнен в виде логического элемента ИЛИ.
Изобретение иллюстрируется чертежом, на котором схематически изображен заявляемый лазерный дальномер.
Лазерный дальномер включает источник излучения с модулированной амплитудой излучения 1, выполненный в виде твердотельного или газового лазера, снабженного модулятором, который может быть выполнен в виде акусто-оптического затвора или ячейки Керра, или в виде полупроводникового лазера; светоделительную пластину 2, первую оптическую линию задержки 3, расположенную в канале калибровки, вторую оптическую линию задержки 4, расположенную в канале измерения и осуществляющую задержку отраженного от объекта сигнала, оптические затворы 5 и 6, подсоединенные, соответственно, к первому и второму выходам таймера 7 и размещенные, соответственно, перед первой и второй линиями задержки 3 и 4; приемную оптическую систему, выполненную в виде линзы 8 со сквозным осевым отверстием, фотоприемник 9, канал управления источником излучения 10, включающий инвертор 11, выполненный на логическом элементе ИЛИ, при этом вход инвертора 11 соединен с выходом фотоприемника 9, а выход подключен к первому входу блока управления и питания 12, второй вход которого соединен с третьим выходом таймера 7, а выход связан с источником излучения 1; частотомер 13, вход которого подключен к выходу фотоприемника 9, а выход связан с входом блока обработки сигнала 14. Первая и вторая оптические линии задержки 3 и 4 выполнены в виде волоконных световодов длиной Lo и Lc, соответственно. Для повышения точности измерений желательно выбрать длину первого световода 3 Lo, удовлетворяющей условию Lo=Lэкв cx, что соответствует значению эталонной частоты

Выбор требуемой длины Lo производится до начала работы дальномера, например, путем перебора нескольких световодов с различными длинами или посредством использования световода с изменяющейся оптической длиной (последний режим можно осуществить путем использования клина) или измерением интенсивности оптического излучения на различных участках световода по ходу распространения светового сигнала. Типичная длина волоконных световодов 3 и 4 с учетом фактических значений τcx в электрических цепях дальномера составляет 1-3 м, что позволяет компактно разместить световоды в пространстве (путем свертывания в кольцо, например, диаметром 15 см, и последовательного наложения колец друг на друга, аналогично пружине) и получить величину Fo меньше 100 МГц, что является вполне приемлемым с точки зрения реализации схемной части дальномера. Волоконные световоды 3 и 4 изготавливаются из кварцевого стекла или полимерного материала, и вблизи торцов световодов размещаются линзы для фокусировки излучения в канал световода. Входная линза 15 второй оптической линии задержки 4 расположена на оптической оси приемной оптической системы, что обеспечивает осевое расположение входа световода 4 по отношению к линзе 8. В этом случае не происходит смещения отраженного светового сигнала по отношению к входу световода 4, что способствует расширению динамического диапазона измеряемого расстояния. При приближении объекта происходит увеличение доли отраженного сигнала и одновременно увеличивается диаметр светового пятна, который становится больше диаметра входной апертуры световода 4, а величина входного сигнала остается практически постоянной во всем диапазоне измеряемых расстояний.
Расстояние между источником излучения 1 и светоделительной пластиной 2 выбирается равным расстоянию между светоделительной пластиной 2 и входной линзой световода 4. Это позволяет определить искомое расстояние L до объекта 16 как расстояние между источником излучения 1 и светоделительной пластиной 2.
Для корректировки ухода частоты при изменении окружающей температуры на входе световода 4 (перед линзой 15 или после нее) может быть установлен оптический клин.
Лазерный дальномер работает следующим образом. С таймера 7 на блок управления и питания 12 подается сигнал логической «1», включающий блок 12. В результате источник излучения 1 начинает генерировать световое излучение. Часть излучения посредством светоделительной пластины 2 направляется на вход световода 3 (в этом режиме посредством таймера 7 затвор 4 закрыт, затвор 3 открыт и отраженное от объекта 16 излучение не поступает на фотоприемник 9). Пройдя через световод 3, излучение попадает на фотоприемник 9. С выхода фотоприемника 9 электрический сигнал в виде логической «1» поступает на вход инвертора 11, который в этом случае вырабатывает на своем выходе сигнал логического «0». С выхода инвертора 11 сигнал логического «0» приходит на блок управления и питания 12, который прекращает генерацию излучения источником 1. Как следствие, на вход инвертора 11 спустя некоторое время, равное времени прохождения светом расстояния (Lo+Lэкв cx), поступает сигнал логического «0», и на выходе инвертора 11 формируется сигнал логической «1», приводящий к возобновлению генерации излучения источником 1. В результате возникает импульсная генерация с эталонной частотой Fo и частотомер 13 регистрирует последовательность световых импульсов с частотой Fo, обратно пропорциональной длине Lo световода 3. После измерения величины Fo в течение определенного промежутка времени, задаваемого таймером 7, открывается затвор 4 и закрывается затвор 3. С выхода фотоприемника 9 электрический сигнал в виде логической «1» поступает на вход инвертора 11, который в этом случае вырабатывает на своем выходе сигнал логического «0». С выхода инвертора 11 сигнал логического «0» приходит на блок управления и питания 12, который прекращает генерацию излучения источником 1. Как следствие, на вход инвертора 11 спустя некоторое время поступает сигнал логического «0», и на выходе инвертора 11 формируется сигнал логической «1», приводящий к возобновлению генерации излучения источником 1. В результате возникает импульсная генерация с сигнальной частотой Fc, регистрируемой частотомером 13. Частота Fc обратно пропорциональна суммарной длине Lс второй линии задержки 4, двойному расстоянию L от источника излучения 1 до объекта 16 и эквивалентной длине Lэкв cx.
Зондирующие световые импульсы с частотой Fc, отражаясь от светоделительной пластины 2, проходят через сквозное отверстие в объективе 8 к объекту 16. Размер сквозного отверстия в линзе 8 выбирается примерно равным диаметру лазерного пучка, формируемого излучателем 1. Отраженное от объекта 16 излучение собирается линзой 8 и фокусируется на входную апертуру световода 4 при помощи линзы 15. Прошедший по световоду 4 отраженный оптический сигнал поступает на фотоприемник 9. С помощью частотомера 13 измеряется частота Fc. В блоке обработки данных 14 рассчитывается разностная частота (Fc-Fo) и по измеренным данным и заранее известным величинам Lc, Lo, с, n0 и nв определяется по формуле (2) расстояние L до объекта 16.
Использование изобретения позволяет значительно расширить динамический диапазон и повысить точность измерений. В частности, при использовании в качестве источника излучения полупроводникового лазера, динамический диапазон измерения составляет, по оценкам авторов, от 30 см до 500 м.
Оценим точность измерений при работе заявляемого дальномера на минимальном и максимальном расстоянии. Абсолютная погрешность измерений может быть оценена с помощью следующей формулы:

Если время отклика электрической схемы дальномера не превышает 10 нс, что соответствует эквивалентной длине Lэкв cx ˜3 м, при работе на минимальном расстоянии, равном 30 см, частота Fo составит около 100 МГц, частота Fc может быть выбрана равной 90 МГц. При этих параметрах погрешность измерения δLmin не превышает 0,1 мм, а при работе на максимальном расстоянии δLмакс=1 мм.
Источники информации
1. Патент РФ №2140622, кл. G01C 3/08, 1999 г.
2. Патент США №6483595, НКИ 356/607, 2002 г.
3. Патент США №7023531, НКИ 356/5.01, 2006 г.
4. Патент США №6147638, НКИ 342/109, 2000 г.
5. Патент США №7139446, НКИ 385/12, 2006 г.
6. Патент РФ №2164005, кл. G01C 3/08, 2000 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕТОДАЛЬНОМЕР | 1998 |
|
RU2164005C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2408842C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭЛЕКТРОННО-ОПТИЧЕСКОГО ТАХЕОМЕТРА | 1994 |
|
RU2097694C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2057285C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2002 |
|
RU2273824C2 |
| Способ измерения линейной скорости объекта и оптико-волоконный измеритель линейной скорости | 1982 |
|
SU1075814A1 |
| Способ определения времени распространения электромагнитных колебаний оптического диапазона | 1990 |
|
SU1810865A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2007 |
|
RU2343413C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2007 |
|
RU2340871C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2013 |
|
RU2535240C1 |
Лазерный дальномер содержит источник излучения, светоделительную пластину, первую оптическую линию задержки, расположенную в канале калибровки, вторую оптическую линию задержки, расположенную в канале измерения, первый и второй оптические затворы, размещенные перед первой и второй линиями задержки, соответственно, приемную оптическую систему, выполненную в виде объектива, фотоприемник, таймер, частотомер, канал управления источником излучения, содержащий инвертор и блок управления и питания, и блок обработки данных. Технический результат: расширение динамического диапазона лазерного дальномера с сохранением высокой точности измерений. 4 з.п. ф-лы, 1 ил.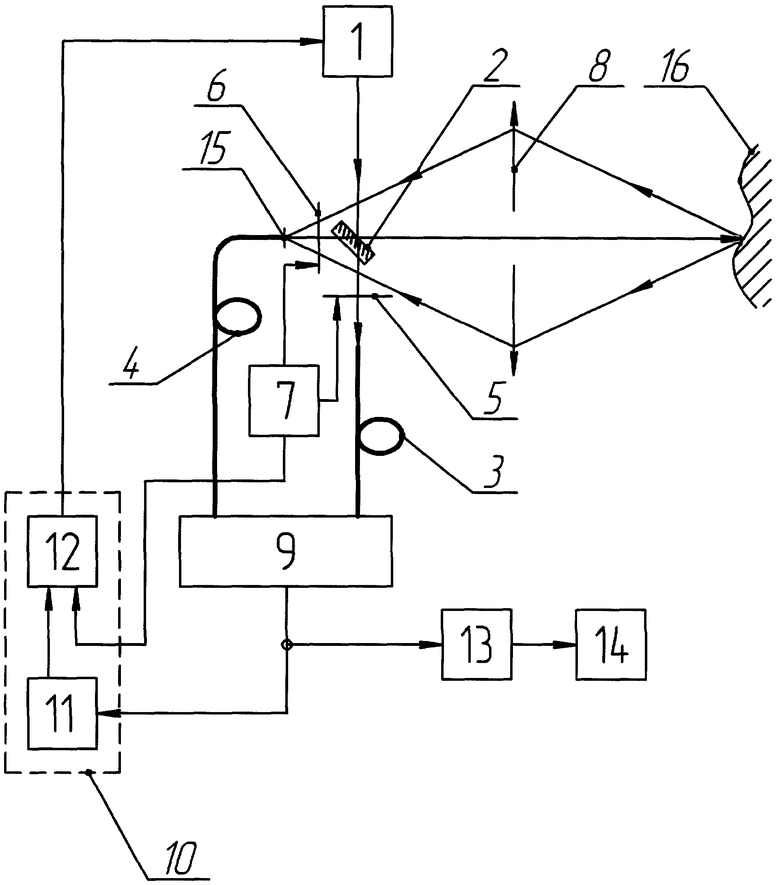
Lo≤Lc,
а частоты Fc и Fo связаны с измеряемым расстоянием L соотношением
 ,
,
где с - скорость света, ΔF=Fc-Fo, n0 - показатель преломления световодов, nв -показатель преломления воздуха.
| СВЕТОДАЛЬНОМЕР | 1998 |
|
RU2164005C2 |
| ФЕМТОСЕКУНДНЫЙ ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2000 |
|
RU2228517C2 |
| Способ изготовления пластической массы | 1927 |
|
SU18851A1 |
| JP 6281738 А, 07.10.1994 | |||
| JP 2001082921 А, 30.03.2001. | |||

