Изобретение относится к лазерной дальнометрии и может быть использовано для измерения расстояний до различных объектов на транспорте, в строительстве, машиностроении и других областях.
Известен способ измерения расстояния, в котором дальность до объекта определяется по времени запаздывания отраженного от объекта импульсного светового сигнала [1-3]. Недостатком указанного способа является невысокая абсолютная точность при измерении малых расстояний.
Известен также способ измерения расстояния по запаздыванию фазы модулированного светового сигнала при прохождении им двойного измеряемого расстояния [4-7]. Недостатком известного способа является его сложность, которая возрастает при повышении требований к точности измерений.
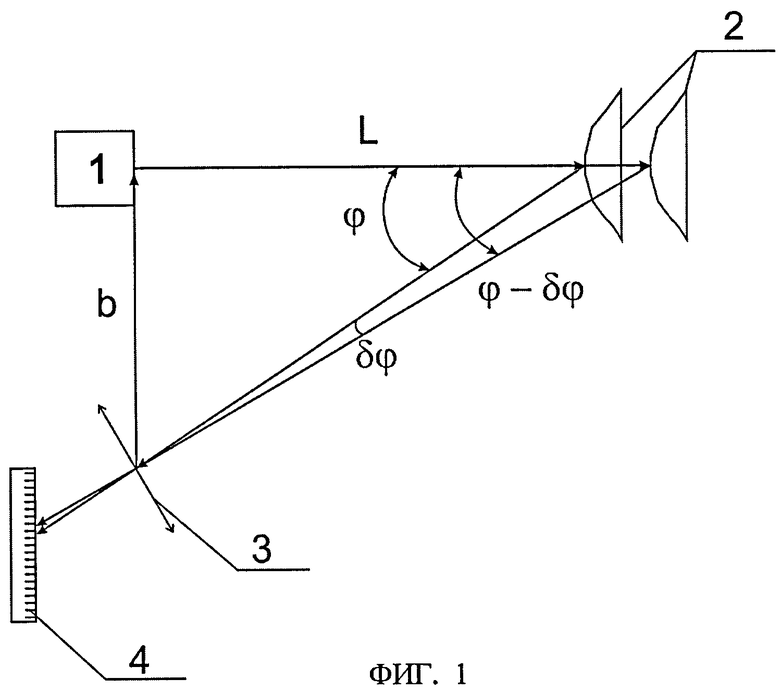
Наиболее близким техническим решением к заявляемому способу является способ измерения расстояния по триангуляционной схеме (фиг.1), в котором направляют на объект зондирующее излучение, генерируемое источником излучения, регистрируют фотоприемником отраженное от объекта излучение и определяют расстояние до объекта L по триангуляционной формуле L=b/tgφ, где b - расстояние от выходной апертуры источника излучения до фотоприемника в направлении, перпендикулярном к направлению зондирующего излучения (база триангуляции), φ - угол триангуляции между направлением зондирующего излучения и направлением отраженного от объекта излучения на фотоприемник. Устройство для осуществления указанного способа содержит источник лазерного излучения и фотоприемник, регистрирующий отраженное от объекта излучение [8].
Недостатком известного способа и устройства является невысокая точность измерений малых расстояний (меньших 1 м), определяемая точностью измерения угла триангуляции. Так, в частности, погрешность измерения расстояния L~100 мм при базе триангуляции b, равной 100 мм, фокусном расстоянии линзы, расположенной между объектом и фотоприемником (ПЗС матрицей), равном 12 мм, и погрешности измерения угла триангуляции δφ, определяемой типичным размером одного пикселя стандартной ПЗС матрицы, близка к 50 мкм.
Задача, решаемая изобретением, повышение точности измерения малых расстояний.
Указанная задача решается тем, что в способе измерения расстояния, в котором направляют на объект зондирующее излучение, генерируемое источником излучения, регистрируют отраженное от объекта излучение фотоприемными средствами и определяют расстояние до объекта L по формуле

где b - база триангуляции, а φ - угол триангуляции между направлением зондирующего излучения и направлением отраженного от объекта излучения на фотоприемник, до регистрации отраженного излучения фотоприемными средствами осуществляют его задержку в световоде за счет отражения излучения от внутренней поверхности световода, соотносят базу триангуляции b к входной апертуре световода и определяют угол триангуляции φ по времени Δt распространения в световоде отраженного от объекта излучения, для чего ориентируют нормаль n к плоскости входной апертуры световода относительно направления зондирующего излучения под углом β в пределах от 0 до 90 градусов, устанавливают соотношение между углом триангуляции φ и углом падения отраженного от объекта излучения на входную апертуру световода αпад с помощью выражения

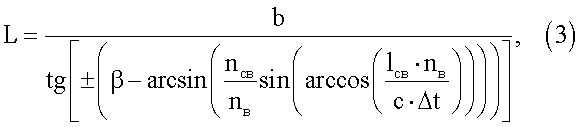
где знак «+» выбирается при отсчете угла β против часовой стрелки, а знак «-» выбирается при отсчете угла β по часовой стрелки относительно направления зондирующего излучения, измеряют время распространения в световоде Δt отраженного от объекта излучения и рассчитывают расстояние L по формуле

где Δt - время распространения отраженного от объекта излучения в световоде, lсв - длина световода, ncв - показатель преломления среды, по которой распространяется излучение в световоде, nв - показатель преломления воздуха, с - скорость распространения света в вакууме, а

В варианте технического решения определение времени распространения отраженного от объекта излучения в световоде Δt осуществляют путем измерения времени t1 распространения зондирующего излучения до объекта и отраженного излучения от объекта до выходной апертуры световода, измерения времени t2 распространения зондирующего излучения до объекта и отраженного излучения до входной апертуры световода и определения времени распространении отраженного от объекта излучения в световоде Δt по формуле Δt=t1-t2.
В варианте технического решения определение времени распространения отраженного от объекта излучения в световоде Δt осуществляют путем измерения времен t1 распространения зондирующего излучения до объекта и отраженного от объекта излучения по первому оптическому пути до выходной апертуры световода, измерения времени t2 распространения зондирующего излучения до объекта и отраженного от объекта излучения по второму оптическому пути до точки, находящейся в плоскости, перпендикулярной к направлению зондирующего излучения, проходящей через входную апертуру световода, лежащей на расстоянии b от упомянутого направления, и определения времени задержки Δt по формуле Δt=t1-t2.
В варианте технического решения для определения времени задержки Δt осуществляют режим рециркуляции источника зондирующего излучения, в котором запуск упомянутого источника осуществляют при помощи выходных сигналов фотоприемных средств, формирующих последовательности зондирующих импульсов, поочередно измеряют частоту рециркуляции F1 при распространении излучения по первому оптическому пути, содержащему световод и частоту рециркуляции F2 при распространения излучения по второму оптическому пути, не содержащему световода, и определяют время задержки Δt по формуле

Указанная задача решается также тем, что устройство для осуществления способа измерения расстояния, содержащее источник зондирующего излучения, фотоприемные средства регистрации отраженного от объекта излучения, связанные со средствами обработки результатов измерений, снабжено световодом, входная апертура которого ориентирована под углом β к направлению зондирующего излучения в пределах от 0 до 90 градусов, для задержки отраженного от объекта излучения, при этом входная апертура световода расположена в плоскости выходной апертуры источника зондирующего излучения на расстоянии b от направления зондирующего излучения, а средства обработки результатов снабжены средствами измерения временных интервалов.
В варианте технического решения фотоприемные средства регистрации отраженного от объекта излучения выполнены в виде первого и второго фотоприемников, размещенных, соответственно, у входной и выходной апертур световода, и связанных со средствами измерения временных интервалов.
В варианте технического решения фотоприемные средства регистрации отраженного от объекта излучения выполнены в виде первого фотоприемника, размещенного у выходной апертуры световода, и второго фотоприемника, расположенного в точке, находящейся в плоскости, перпендикулярной к направлению зондирующего излучения и проходящей через входную апертуру световода, и лежащей на расстоянии b от упомянутого направления.
В варианте технического решения источник зондирующего излучения выполнен в виде импульсного лазера.
В варианте технического решения устройство для осуществления способа измерения расстояния до объекта, содержащее источник зондирующего излучения, фотоприемные средства регистрации отраженного от объекта излучения и средства обработки результатов измерений, снабжено световодом, входная апертура которого ориентирована под углом β к направлению зондирующего излучения в пределах от 0 до 90 градусов для задержки в нем отраженного от объекта излучения и расположена в плоскости выходной апертуры источника зондирующего излучения на расстоянии b от направления зондирующего излучения, и блоком управления источником зондирующего излучения, при этом фотоприемные средства регистрации отраженного излучения выполнены в виде первого фотоприемника, размещенного у выходной апертуры световода, и второго фотоприемника, расположенного в плоскости выходной апертуры источника зондирующего излучения и входной апертуры световода на расстоянии b от направления зондирующего излучения; между источником зондирующего излучения и упомянутыми фотоприемниками, с одной стороны, и объектом, с другой стороны, размещен оптический модулятор, выполненный с возможностью обеспечения постоянного доступа зондирующего излучения к объекту и поочередного доступа отраженного излучения к первому и второму фотоприемникам, а средства обработки результатов измерений включают усилитель, подключенный первым входом к выходу первого фотоприемника, а вторым входом - к выходу второго фотоприемника; инвертор, связанный своим входом с выходом усилителя, а первым выходом - с входом блока управления источником зондирующего излучения, частотомер, вход которого соединен с выходом инвертора, и блок обработки результатов, подключенный к выходу частотомера.
В варианте технического решения световод выполнен в виде оптического волокна.
В варианте технического решения световод выполнен в виде многомодового оптического волокна.
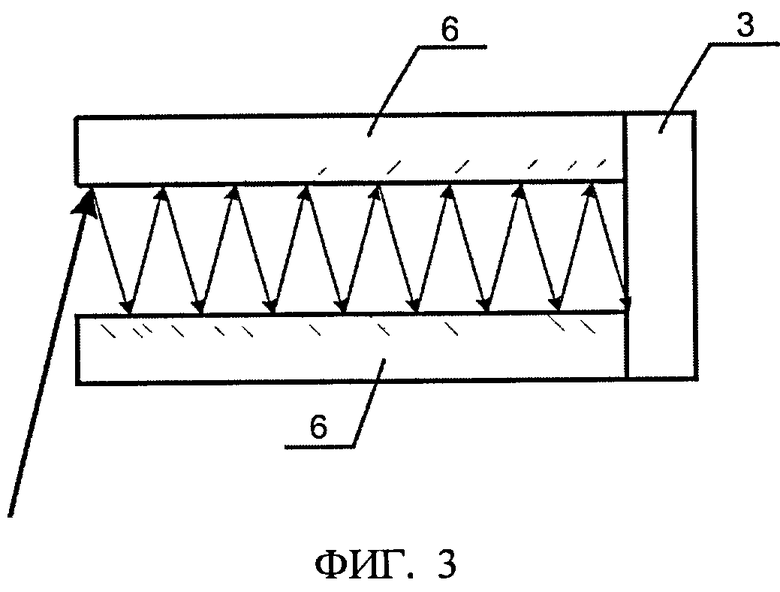
В варианте технического решения световод выполнен в виде системы зеркал, расположенных параллельно друг другу с возможностью последовательного отражения излучения.
Сущность заявляемого изобретения состоит в том, что при определении расстояния до объекта по формуле (1) угол триангуляции φ находят, измеряя время распространения отраженного от объекта излучения Δt в световоде, которое зависит от параметров световода и угла входа αвх отраженного излучения в световод в соответствии с формулой

Угол входа αвх связан с углом падения αпад отраженного от объекта излучения на входную апертуру световода соотношением

а угол падения αпад, в свою очередь, однозначно связан посредством ориентации под углом β нормали к входной апертуре световода относительно направления зондирующего излучения с углом триангуляции φ соотношением (2), что, в конечном счете, позволяет определить расстояние L до объекта по формуле (1).
Изобретение иллюстрируется чертежами.
На фиг.1 иллюстрируется триангуляционный принцип измерения расстояния, на фиг.2 показано устройство по одному из вариантов для осуществления заявляемого способа, которое соответствует первому варианту определения времени задержки отраженного от объекта излучения Δt в световоде, на фиг.3 иллюстрируется выполнение световода в виде системы зеркал, на фиг.4 показано устройство по другому варианту для осуществления заявляемого способа, которое соответствует второму варианту определения времени задержки отраженного от объекта излучения, на фиг.5 приведено взаимное расположение второго фотоприемника и входной апертуры световода во втором варианте устройства, на фиг.6 иллюстрируется выполнение рециркуляционного варианта триангуляционного дальномера.
Устройство для реализации заявляемого способа по одному из вариантов (фиг.2) включает в себя источник зондирующего излучения, выполненный, например, в виде лазерного диода 1, световод 2, выполняющий роль оптической линии задержки, первый фотоприемник 3, размещенный у входной апертуры световода 2, второй фотоприемник 4, расположенный у выходной апертуры световода 2, и блок измерения временных интервалов 5, связанный с фотоприемниками 3 и 4. Входная апертура световода 2 находится на расстоянии b относительно направления зондирующего лазерного излучения (или, говоря иначе, база триангуляции b соотнесена к входной апертуре световода) и нормаль n к плоскости входной апертуры световода 2 ориентирована относительно направления зондирующего излучения под углом β в пределах от 0° до 90°.
Длину световода lсв и угол падения αпад излучения на входную апертуру световода целесообразно выбрать достаточно большими (lcв≥50 м, αпад≥45°), чтобы небольшое изменение угла триангуляции δφ приводило к существенному изменению времени распространения излучения в световоде. Такая протяженность, например, оптоволоконного световода позволяет компактно разместить его в пространстве путем свертывания в кольца аналогично пружине и получить минимальное время задержки в световоде Δtmin, равное 250 нс, что существенно больше времени отклика (10-8-10-9 с) существующих быстродействующих фотодетекторов (лавинного или PIN-фотодиода) и удовлетворяет критерию получения высокой точности измерений, который заключается в том, что время распространения отраженного от объекта излучения должно быть больше или равно времени отклика τсх электронной схемы регистрации, т.е. Δt≥τсх. В результате небольшое изменение угла триангуляции φ приводит к существенному изменению времени распространения излучения в световоде Δt.
Конструктивно световод 2 может быть выполнен в виде оптического волокна, например в виде многомодового кварцевого оптического волокна. Световод 2 также может быть выполнен в виде системы зеркал 6 (фиг.3), расположенных параллельно друг другу с возможностью последовательного отражения излучения.
Заявляемый способ реализуется в данном случае следующим образом. Излучение, генерируемое лазерным диодом 1, направляется на поверхность объекта 7, расстояние до которого L измеряется, и диффузно отражается от него. Излучение, отраженное под углом φ, частично попадает во входную апертуру световода 2 под некоторым углом αпад по отношению к нормали n к входной апертуре световода и распространяется в нем путем многократного отражения от стенок световода, а частично регистрируется первым фотоприемником 3, и соответствующий сигнал (старт-сигнал) поступает на блок измерения временных интервалов 5. Соотношение между углом триангуляции φ и углом падения отраженного от объекта излучения на входную апертуру световода - αпад имеет вид φ=±(β-αпад), где знак «+» выбирается при отсчете угла β против часовой стрелки, а знак «-» выбирается при отсчете угла β по часовой стрелке относительно направления зондирующего излучения (т.е. при повороте по или против часовой стрелки, если смотреть в направлении зондирующего луча, падающего на поверхность объекта). Излучение, прошедшее световод 2, регистрируется вторым фотоприемником 4, и в блок 5 поступает стоп-сигнал (выходной сигнал фотоприемника 4). Разность между временами прихода в блок 5 стоп- и старт-сигналов равна Δt - времени задержки сигнала (отраженного излучения) в световоде 2. Далее по формуле αвх=arccos[(lcв·nсв)/с·Δt], где lсв - длина световода, ncв - показатель преломления среды, по которой распространяется излучение в световоде, и с - скорость распространения света в вакууме, находится угол входа излучения в световод αвх. На следующем этапе из выражения nсвsinαвх=nвsinαпад по известной величине αвх определяется αпад, и далее находится из формулы (2) значение угла φ. Заключительный этап - расчет искомого расстояния L по триангуляционной формуле (1).
Описанную выше процедуру определения расстояния L можно выразить и в более компактном виде
 ,
,
где nв - показатель преломления воздуха.
В рассмотренном выше устройстве отраженное излучение распространяется от объекта до фотоприемных средств по одному оптическому пути и измерение времени задержки Δt производится с помощью двух фотоприемников, расположенных у входной и выходной апертур световода. На фиг.4 показано устройство для реализации заявляемого способа, в котором время задержки Δt определяется при распространении отраженного излучения по двум различным оптическим путям.
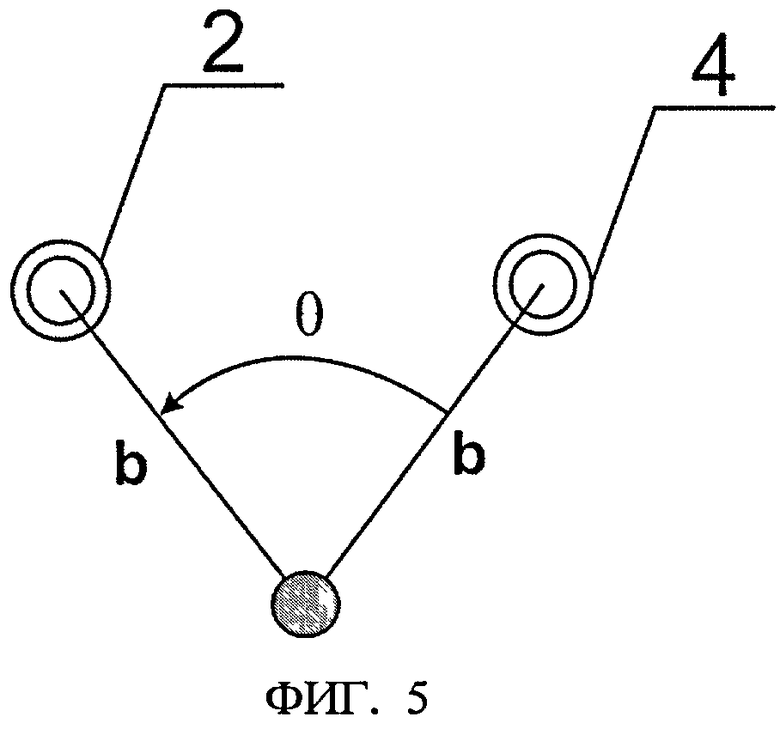
Указанное устройство включает источник зондирующего излучения, выполненный, например, в виде лазерного диода 1, световод 2, входная апертура которого ориентирована под углом β к направлению зондирующего излучения и находится на расстоянии b относительно направления зондирующего излучения, первый фотоприемник 3, размещенный у выходной апертуры световода 2, второй фотоприемник 4, расположенный в точке, находящейся в плоскости, перпендикулярной к направлению зондирующего излучения и проходящей через входную апертуру световода 2, и лежащей на расстоянии b от направления зондирующего излучения (от выходной апертуры лазерного диода 1), блок измерения временных интервалов 5, связанный с фотоприемниками 3 и 4, и устройство управления лазерным диодом (драйвер лазерного диода) 8. Так же, как и в устройстве на фиг.2, нормаль к плоскости входной апертуры световода 2 ориентирована относительно направления зондирующего излученияпод углом β в пределах от 0° до 90°. Фотоприемник 4 смещен относительно входной апертуры световода 2 на некоторый угол θ (фиг.5).
Заявляемый способ реализуется аналогично описанному выше с той разницей, что время задержки Δt определяется как разность между временем прихода на блок 5 сигнала с фотоприемника 3 (задержанного в световоде 2 сигнала) и временем прихода на блок 5 сигнала с фотоприемника 4 (незадержанного сигнала).
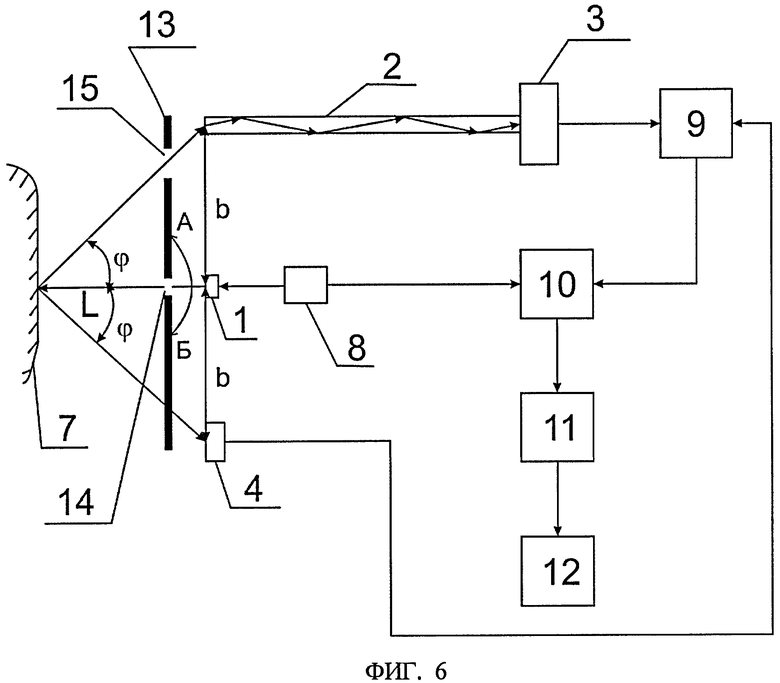
Устройство для осуществления заявляемого способа может быть реализовано в виде лазерного дальномера рециркуляционного типа с лазерным источником, работающим в самозапускающемся режиме (фиг.6). Дальномер указанного типа характеризуется тем, что каждый последующий зондирующий лазерный импульс инициируется окончанием предыдущего импульса, зарегистрированного фотоприемником, или, говоря иначе, работа лазера контролируется фотоприемником [9, 10].
В этом случае время задержки отраженного излучения в световоде 2 измеряется по частотам рециркуляции F1 и F2 лазера, где F1 - частота рециркуляции при прохождении отраженного от объекта излучения по первому оптическому пути, содержащему световод, a F2 - частота рециркуляции при прохождении отраженного от объекта излучения по второму оптическому пути, не содержащему световод. Следует отметить, что при измерении малых расстояний погрешность измерения частот рециркуляции существенно ниже погрешности измерения временных интервалов.
Рециркуляционный дальномер включает источник зондирующего излучения, выполненный в виде лазерного диода 1, световод 2, нормаль n к входной апертуре которого ориентирована под углом β по отношению к направлению зондирующего излучения и находится на расстоянии b относительно направления зондирующего лазерного излучения, первый фотоприемник 3, размещенный у выходной апертуры световода 2, второй фотоприемник 4, расположенный в точке, находящейся в плоскости, перпендикулярной к направлению зондирующего излучения и проходящей через входную апертуру световода 2, и лежащей на расстоянии b от направления зондирующего излучения (от выходной апертуры лазера 1), блок управления источником зондирующего излучения 8, усилитель 9, инвертор 10, частотомер 11, блок обработки результатов измерений 12 и оптический модулятор 13. Усилитель 9 подключен первым входом к фотоприемнику 3, вторым входом - к фотоприемнику 4, а выходом - к входу инвертора 10. Первый выход инвертора 10 подсоединен к входу блока управления источником зондирующего излучения 8, а второй выход инвертора 10 подключен к входу частотомера 11, выход которого соединен с блоком обработки результатов измерений 12. Выход блока 8 подключен к лазеру 1. Модулятор 13 размещен между лазером 1 и фотоприемниками 3 и 4, с одной стороны, и объектом 7, с другой стороны, и выполнен с возможностью постоянного доступа зондирующего излучения к поверхности объекта и поочередного доступа отраженного излучения к фотоприемникам 3 и 4 (положения А и Б). С этой целью в модуляторе 13, имеющем, например, форму диска, выполнено два сквозных отверстия (две диафрагмы) 14 и 15, причем отверстие 14 расположено на оси диска, соосно с направлением зондирующего излучения, а отверстие 15 расположено на радиальном расстоянии, несколько меньшем b, для обеспечения прохода отраженного под углом φ излучения к фотоприемникам 3 или 4. Модулятор 13 снабжен приводом (на фиг.6 не показан).
Заявляемый способ в режиме измерения времени задержки Δt по частотам рециркуляции F1 и F2 лазера с помощью указанного выше рециркуляционного дальномера осуществляется следующим образом.
После поступления сигнала логической «1» с выхода инвертора 10 блок управления 8 подает напряжение на лазер 1, который начинает генерировать излучение. Зондирующее излучение через отверстие 14 поступает на поверхность объекта 7. Модулятор 13 посредством привода устанавливается в положение А, когда отверстие 15 расположено вблизи входной апертуры световода 2, на пути луча, отраженного от объекта под углом φ. Вследствие этого часть отраженного от объекта излучения попадает на входную апертуру световода 2 и регистрируется фотоприемником 3. С выхода фотоприемника 3 сигнал поступает в усилитель 9, усиливается в нем и с выхода усилителя 4 поступает на вход инвертора 10, на выходе которого формируется сигнал логического «0». Этот сигнал передается в блок управления 8 и выключает лазер 1, что приводит к прекращению генерации зондирующего излучения. Спустя некоторое время, равное времени прохождения излучением расстояния от лазера до фотоприемника 3, инвертор 10 снова формирует сигнал логической «1» и блок управления 8 включает лазер 1, возобновляя его генерацию. Таким образом, возникает генерация с частотой следования импульсов F1, которую регистрирует частотомер 11. После измерения величины F1 с помощью частотомера 11 модулятор 13 устанавливается приводом в положение Б. В этом режиме зондирующее излучение по-прежнему через отверстие 14 поступает к объекту, а отверстие 15 перемещается по направлению к фотоприемнику 4. В результате обеспечивается доступ отраженного излучения к фотоприемнику 4, прекращается доступ отраженного излучения в световод 2 и возникает - по описанному выше алгоритму - генерация лазерных импульсов с частотой F2, формирование которой происходит без задержки излучения в световоде 2. После измерения частот F1 и F2 в блоке обработки результатов измерений 12 вычисляется разностная частота ΔF=(F2-F1) и рассчитывается время распространения излучения в световоде Δt по формуле (5). Далее из формулы (6) находится угол αвх, затем последовательно определяются углы αпад и φ из формул (7) и (2) соответственно и искомое расстояние L из формулы (1).
Оценим погрешность определения дальности до объекта в заявляемом способе.
В нашем случае относительная погрешность измерений расстояния L определяется выражением

Учитывая, что погрешности определения базы Δb и угла триангуляции Δβ являются систематическими, основной вклад в погрешность измерения расстояний вносит величина Δαпад, которая связана с погрешностью определения величин Δαвх и δΔt=Δt1+Δt2 или ΔF1 и ΔF2 посредством выражений



Выражение (11) справедливо при выполнении условия Δt≈τcx. Так как при измерении малых расстояний относительная погрешность определения частоты рециркуляции существенно меньше относительной погрешности измерения временных интервалов, оценим погрешность измерения предлагаемого варианта триангуляционного дальномера при работе в рециркуляционном режиме. В этом случае

При длине световода, равной 50 м, абсолютной погрешности измерения частоты рециркуляции 1 Гц и угле входа излучения в световод, близком к 45 градусам, имеем относительную погрешность ΔL/L≈6·10-6. В этом случае, при измерении расстояния L=100 мм, абсолютная погрешность составляет ΔL≈0,6 мкм, что более чем на порядок величины превосходит точность измерения таких же расстояний обычным триангуляционным способом.
Таким образом, использование изобретения позволяет существенно повысить точность измерения расстояний до объекта и тем самым достичь поставленной цели изобретения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. N.Burns et al. System design of a pulsed laser rangeflnder. Optical Engineering, Vol.30, No.3, pp.323-328.
2. Патент США №6088085, МПК G01C 3/08, 2000 г.
3. Патент США №6803998, МПК G01C 3/08, 2004 г.
4. M.-C.Amman, M.Rioux et al. Laser ranging: a critical review of usual techniques for distance measurement. Optical Engineering, Vol.40, No.1, pp.10-19.
5. Патент США №6100540, МПК G01C 3/08, 2000 г.
6. Патент США №7023531, МПК G01C 3/08, 2006 г.
7. Патент США №7388655, МПК G01C 3/08, 2008 г.
8. А.З.Венедиктов. Основные принципы построения оптико-электронных систем триангуляционных измерителей. Вестник РГРТА. Вып.15, 2004. С.45-51 (прототип).
9. К.Н.Коростик. Рециркуляционный метод в прикладных исследованиях. Приборы и техника эксперимента, 1996, №5. С.5-18.
10. Q.Chen et al. Self-triggering pulsed time-of-flight laser range-finding method. Optical Engineering, Vol.42, No.12, p.3608-3611.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ, ЭЛЕМЕНТОВ ДВИЖЕНИЯ ЦЕЛИ И КОЭФФИЦИЕНТА КИЛОМЕТРИЧЕСКОГО ЗАТУХАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ЦЕЛИ | 2014 |
|
RU2586078C2 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2748459C1 |
| СПОСОБ ВИДЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2397510C2 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2751644C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ХИМИЧЕСКОГО АНАЛИЗА | 1996 |
|
RU2157987C2 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| ДАЛЬНОМЕРНОЕ УСТРОЙСТВО | 2018 |
|
RU2684445C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1999 |
|
RU2178187C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2514162C1 |

Для осуществления способа на объект направляют зондирующее излучение, генерируемое источником излучения. Затем регистрируют отраженное от объекта излучение фотоприемными средствами и определяют расстояние до объекта L по формуле L=b/tgφ, где b - база триангуляции, а φ - угол триангуляции. Угол φ определяют по времени Δt распространения в световоде отраженного от объекта излучения. Первый и второй варианты устройства содержат источник зондирующего излучения, фотоприемные средства регистрации отраженного от объекта излучения. Фотоприемные средства связаны со средствами обработки сигнала. Устройство снабжено световодом для задержки отраженного от объекта излучения. В первом варианте средства обработки сигнала снабжены средствами измерения временных интервалов. А второй вариант дополнительно содержит фотоприемные средства регистрации отраженного излучения, которые выполнены в виде первого фотоприемника, размещенного у выходной апертуры световода, и второго фотоприемника, расположенного в плоскости выходной апертуры источника зондирующего излучения и входной апертуры световода. Между источником зондирующего излучения и фотоприемниками, с одной стороны, и объектом, с другой стороны, размещен оптический модулятор. Средства обработки сигнала включают усилитель, подключенный первым входом к выходу первого фотоприемника, а вторым входом - к выходу второго фотоприемника, инвертор, частотомер и блок обработки сигнала, подключенный к выходу частотомера. Инвертор связан входом с выходом усилителя, первым выходом - с входом блока управления источником зондирующего излучения и вторым выходом с входом частотомера. Технический результат - повышение точности измерения малых расстояний. 3 н. и 9 з.п. ф-лы, 6 ил.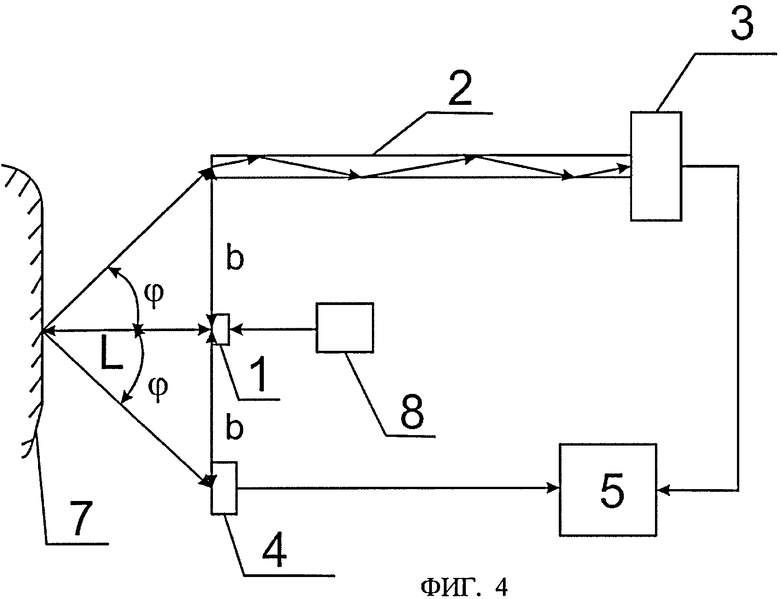
1. Способ измерения расстояния, в котором направляют на объект зондирующее излучение, генерируемое источником излучения, регистрируют отраженное от объекта излучение фотоприемными средствами и определяют расстояние до объекта L по формуле
где b - база триангуляции, а φ - угол триангуляции между осью зондирующего излучения и направлением на фотоприемник отраженного от объекта излучения, отличающийся тем, что до регистрации отраженного излучения фотоприемными средствами осуществляют его задержку в световоде за счет отражения излучения от внутренней поверхности световода, входная апертура световода находится на расстоянии b относительно направления зондирующего лазерного излучения, определяют угол триангуляции φ по времени Δt распространения в световоде отраженного от объекта излучения, для чего ориентируют нормаль n к плоскости входной апертуры световода относительно направления зондирующего излучения под углом β в пределах от 0 до 90°, устанавливают соотношение между углом триангуляции φ и углом падения отраженного от объекта излучения на входную апертуру световода αпад с помощью выражения

где знак «+» выбирается при отсчете угла β против часовой стрелки, а знак «-» выбирается при отсчете угла β по часовой стрелки относительно направления зондирующего излучения, измеряют время распространения в световоде Δt отраженного от объекта излучения и рассчитывают расстояние L по формуле
где Δt - время распространения отраженного от объекта излучения в световоде, lсв - длина световода, nсв - показатель преломления среды, по которой распространяется излучение в световоде, nв - показатель преломления воздуха, с - скорость распространения света в вакууме, а

2. Способ измерения расстояния по п.1, отличающийся тем, что определение времени распространения в световоде Δt отраженного от объекта излучения осуществляют путем измерения времени t1 распространения зондирующего излучения до объекта и отраженного излучения от объекта до выходной апертуры световода, измерения времени t2 распространения зондирующего излучения до объекта и отраженного излучения до входной апертуры световода и определения времени распространения в световоде Δt отраженного от объекта излучения по формуле Δt=t1-t2.
3. Способ измерения расстояния по п.1, отличающийся тем, что определение времени распространения в световоде Δt отраженного от объекта излучения осуществляют путем измерения времени t1 распространения зондирующего излучения до объекта и отраженного излучения по первому оптическому пути от объекта до выходной апертуры световода, измерения времени t2 распространения зондирующего излучения до объекта и отраженного излучения по второму оптическому пути от объекта до точки, находящейся в плоскости, перпендикулярной к направлению зондирующего излучения и проходящей через входную апертуру световода, и лежащей на расстоянии b от упомянутого направления, и определения времени распространения в световоде Δt отраженного от объекта излучения по формуле Δt=t1-t2.
4. Способ измерения расстояния по п.1, отличающийся тем, что, с целью определения времени распространения в световоде Δt отраженного от объекта излучения, осуществляют режим рециркуляции источника зондирующего излучения, в котором запуск упомянутого источника осуществляют при помощи выходных сигналов фотоприемных средств, формирующих последовательности зондирующих импульсов, измеряют частоту рециркуляции F1 при распространении излучения по оптическому пути, содержащему световод, измеряют частоту рециркуляции F2 при распространении излучения по оптическому пути, не содержащему световода, и определяют время распространения в световоде Δt отраженного от объекта излучения по формуле Δt=(F2-F1)/2F2F1.
5. Устройство для осуществления способа по п.1, содержащее источник зондирующего излучения, фотоприемные средства регистрации отраженного от объекта излучения, связанные со средствами обработки сигнала, отличающееся тем, что оно снабжено световодом для задержки отраженного от объекта излучения, при этом входная апертура световода расположена в плоскости выходной апертуры источника зондирующего излучения на расстоянии b от направления зондирующего излучения, а средства обработки сигнала снабжены средствами измерения временных интервалов.
6. Устройство по п.5, отличающееся тем, что фотоприемные средства регистрации отраженного от объекта излучения выполнены в виде первого и второго фотоприемников, размещенных соответственно у входной и выходной апертуры световода и связанных со средствами измерения временных интервалов.
7. Устройство по п.5, отличающееся тем, что фотоприемные средства регистрации отраженного от объекта излучения выполнены в виде первого фотоприемника, размещенного у выходной апертуры световода, и второго фотоприемника, расположенного в точке, находящейся в плоскости, перпендикулярной к направлению зондирующего излучения и проходящей через входную апертуру световода и лежащей на расстоянии b от упомянутого направления.
8. Устройство по п.5, отличающееся тем, что источник зондирующего излучения выполнен в виде импульсного лазера.
9. Устройство для осуществления способа по п.1, содержащее источник зондирующего излучения, фотоприемные средства регистрации отраженного от объекта излучения и средства обработки сигнала, отличающееся тем, что оно снабжено световодом для задержки отраженного от объекта излучения, входная апертура которого расположена в плоскости выходной апертуры источника зондирующего излучения на расстоянии b от направления зондирующего излучения, и блоком управления источником зондирующего излучения, при этом фотоприемные средства регистрации отраженного излучения выполнены в виде первого фотоприемника, размещенного у выходной апертуры световода, и второго фотоприемника, расположенного в плоскости выходной апертуры источника зондирующего излучения и входной апертуры световода на расстоянии b от направления зондирующего излучения; между источником зондирующего излучения и упомянутыми фотоприемниками, с одной стороны, и объектом, с другой стороны, размещен оптический модулятор, выполненный с возможностью обеспечения постоянного доступа зондирующего излучения к объекту и поочередного доступа отраженного излучения к первому и второму фотоприемникам, а средства обработки сигнала включают усилитель, подключенный первым входом к выходу первого фотоприемника, а вторым входом - к выходу второго фотоприемника, инвертор, связанный своим входом с выходом усилителя, а первым выходом - с входом блока управления источником зондирующего излучения, частотомер, вход которого соединен со вторым выходом инвертора, и блок обработки сигнала, подключенный к выходу частотомера.
10. Устройство по п.9, отличающееся тем, что световод выполнен в виде оптического волокна.
11. Устройство по п.9, отличающееся тем, что световод выполнен в виде многомодового оптического волокна.
12. Устройство по п.9, отличающееся тем, что световод выполнен в виде системы зеркал, расположенных параллельно друг другу с возможностью последовательного отражения излучения.
| Импульсный лазерный дальномер | 1982 |
|
SU1045713A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2007 |
|
RU2339909C1 |
| US 6803998 В2, 12.10.2004 | |||
| Рециркуляционный светодальномер | 1989 |
|
SU1810753A1 |

