Предлагаемое изобретение относится к области ракетной техники и может быть использовано в мобильных зенитных комплексах, хранение и пуск ракет в которых осуществляется из транспортно-пусковых контейнеров.
Известна ракета, выполненная по аэродинамической схеме «утка», содержащая корпус, размещенные в нем двигательную установку, аппаратуру системы управления, боевое снаряжение, а также четыре складных аэродинамических руля, расположенных на корпусе равномерно относительно его продольной оси, и четыре складных стабилизатора, установленных в транспортном положении тандемно с рулями (см. Карпенко А.В. «Российское ракетное оружие 1943...1993 г.», 1993, С-Петербург, стр.83, 84, 98, ракета «Top-M1».
Вышеописанная ракета выбрана в качестве прототипа предлагаемого изобретения, как наиболее близкое по своему назначению и технической сущности решение, совпадающее по целому ряду признаков с предлагаемым изобретением.
В транспортном положении рули и стабилизаторы ракеты сложены, и она размещается в контейнере квадратного сечения, причем выброс ее из контейнера осуществляется катапультой, расположенной внутри его. Такое размещение и схема запуска являются неэффективными по сравнению с возможным размещением ракеты в трубе круглого сечения, поскольку количественно снижается боезапас (по сравнению с потенциально возможным по грузоподъемности комплекса) и усложняется конструкция для запуска (для цилиндрического контейнера возможно использование минометного старта). Это в основном обусловлено выбранной конструкцией ракеты. Действительно, с целью обеспечения стабилизации ракеты по крену стабилизаторы, расположенные на конце корпуса, установлены с возможностью вращения вокруг его продольной оси (в целях устранения влияния косого обдува от рулей). Это тоже увеличивает поперечные габариты неподвижной (корневой) части стабилизаторов. Размеры рулей также значительны, поскольку в основном работают на срывных режимах (углы атаки рулей в схеме «утка» велики). В результате даже при складывающихся рулях и стабилизаторах поперечные размеры ракеты в ее транспортном положении излишне велики.
Задачей изобретения является создание управляемой зенитной ракеты с минимальными массово-габаритными параметрами при обеспечении требуемых аэродинамических характеристик.
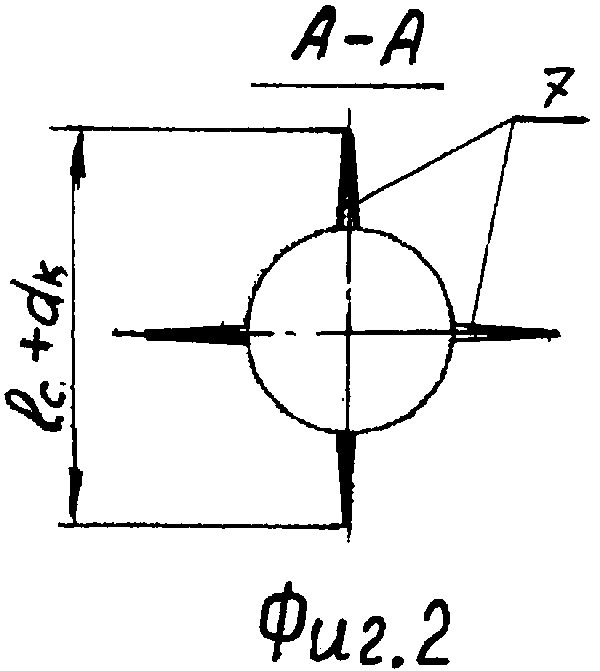
Для достижения поставленной задачи в зенитной управляемой ракете, содержащей корпус, размещенные в нем двигательную установку, аппаратуру системы управления, боевое снаряжение, приводы рулей, а также четыре складывающихся аэродинамических руля и четыре складывающихся стабилизатора, расположенных тандемно и включающих корневую и поворотные части, и механизмы их раскрытия, аэродинамические рули установлены на хвостовой части корпуса, а стабилизаторы размещены перед рулями, причем площадь стабилизаторов выбрана меньше площади рулей, а поворотные части стабилизаторов выполнены с возможностью их сдвига в процессе раскрытия вдоль корпуса в сторону рулей до расстояния между ними, не превышающего 0.06·bос, где bос - бортовая хорда стабилизатора, при этом рули и стабилизаторы сложены таким образом, что диаметр описанной вокруг сложенных рулей и стабилизаторов окружности не превышает 1.2·dk, где dk - диаметр корпуса ракеты, а геометрические параметры корпуса, стабилизаторов и аэродинамических рулей, а также их взаимное расположение связаны следующими соотношениями:
λк=Lк/dk=14...16;

λс=lc 2/(2·Sc)=1.8...2,2;
ηс=bос/bкс=2,5...3,2;

λp=lp 2/(2·Sp)=1.5...2,0;
ηp=bор/bкр=1,8...3,0;
lовр=(13...15)·dk,
где: Lk - длина корпуса ракеты, м;
λк - удлинение корпуса ракеты;
dk - диаметр корпуса ракеты, м;
Sм - площадь миделя корпуса ракеты, м2;
Sc - площадь стабилизатора, м2;
 - относительная площадь стабилизатора;
- относительная площадь стабилизатора;
λс - удлинение стабилизатора;
lс - размах стабилизатора, м;
ηс - сужение стабилизатора;
bос - бортовая хорда стабилизатора, м;
bкс - концевая хорда стабилизатора, м;
Sp - площадь руля, м2;
 - относительная площадь руля;
- относительная площадь руля;
λp - удлинение руля;
lp - размах руля, м;
ηp - сужение руля;
bop - бортовая хорда руля, м;
bкр - концевая хорда руля, м;
lовр - расстояние от носка корпуса ракеты до оси вращения руля, м.
При этом механизм раскрытия стабилизатора выполнен в виде работающей на кручение цилиндрической винтовой пружины, закрепленной на корневой части стабилизатора с возможностью воздействия на его поворотную часть, и пружины сжатия, установленной на оси в корневой части стабилизатора с возможностью сдвига поворотной части последнего вдоль корпуса и входа закрепленных на поворотной части стабилизатора фиксирующих штифтов в соответствующие пазы, расположенные в корневой части стабилизатора.
Механизм раскрытия руля выполнен в виде расположенного в выходном валу привода руля подпружиненного толкателя, взаимодействующего своей средней частью с поворотной частью руля, и фиксирующего поворотную часть руля в рабочем положении.
Такое выполнение устройства позволило устранить основные недостатки прототипа. Была снижена площадь рулей, а площадь стабилизаторов выбрана вообще меньшей площади рулей, т.е. уменьшилась наиболее существенно. При этом вследствие больших балансировочных углов атаки корпус ракеты создает не меньшую величину подъемной силы, нежели прототип с его более развитыми рулями и стабилизаторами.
Расстояние между задней кромкой стабилизатора и передней кромкой руля в предложенной ракете целесообразно выбрать минимальным, т.к. кроме функции регулятора начальной статической устойчивости ракеты стабилизатор в данном случае выполняет еще и роль своеобразных направляющих лопаток для набегающего на рули воздушного потока, увеличивая тем самым его эффективность. Введенное выше ограничение на взаимное расстояние между стабилизатором и рулем учитывает этот фактор совместно с технологическими соображениями.
В связи с более простой конструкцией планера ракеты может быть снижена и масса ракеты в целом. В результате сочетания предложенных соотношений и технических решений по механизмам раскрытия стабилизаторов и рулей оказалось возможным обеспечить размещение ракеты в цилиндрическом контейнере минимального поперечного сечения и позволить использовать минометный старт. Это дало возможность увеличить боезапас комплекса при одновременном упрощении схемы старта ракет.
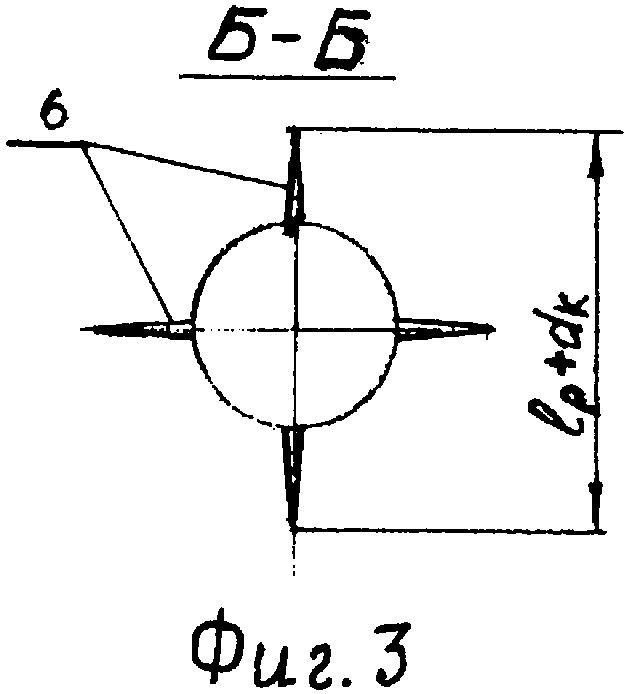
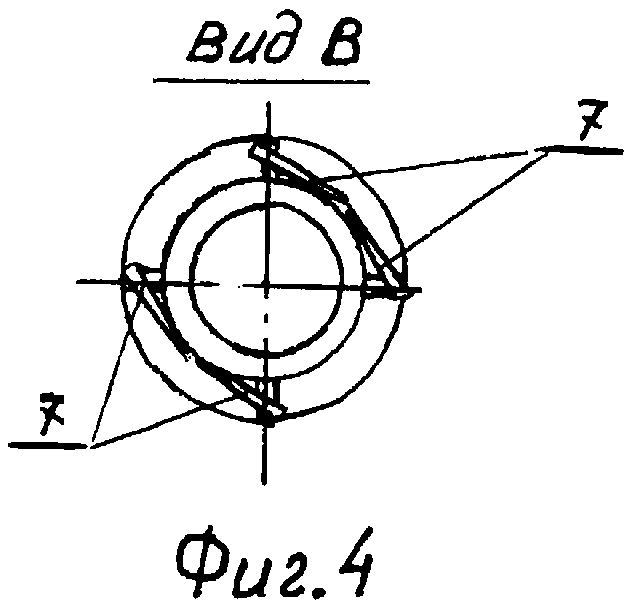
На Фиг.1 изображен общий вид предлагаемой ракеты. На Фиг.2 и 3 представлены поперечные сечения А-А и Б-Б (см. Фиг.1) ракеты в районе установки стабилизаторов и в районе рулей соответственно. На Фиг.4 приведен вид спереди ракеты в ее транспортном положении (вид В).
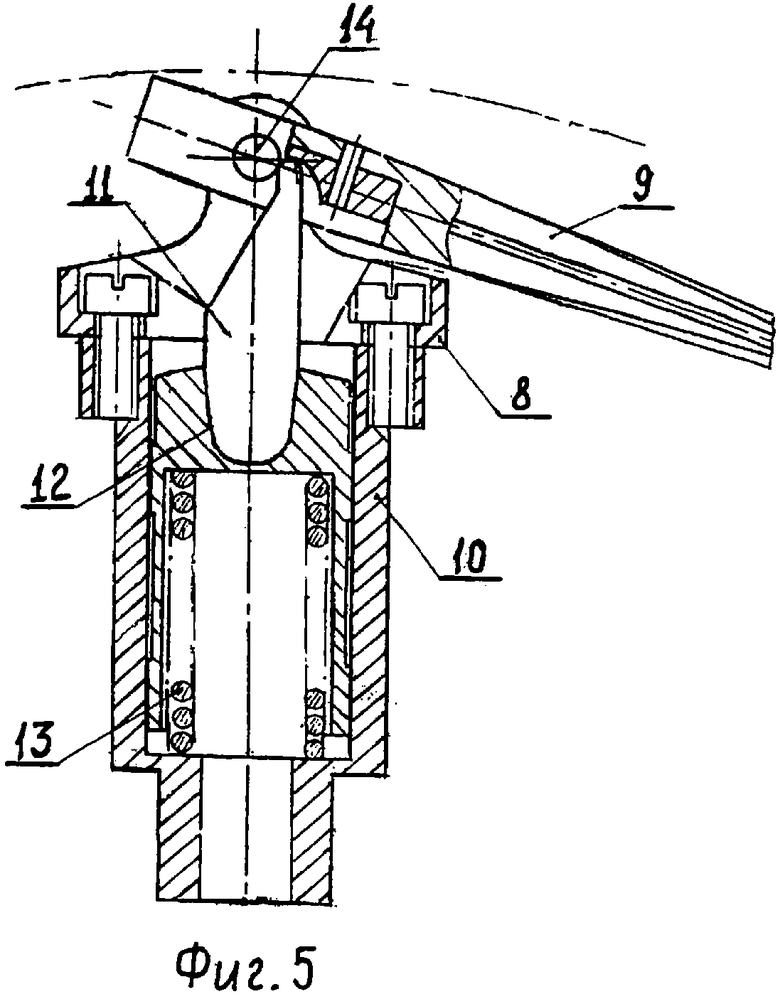
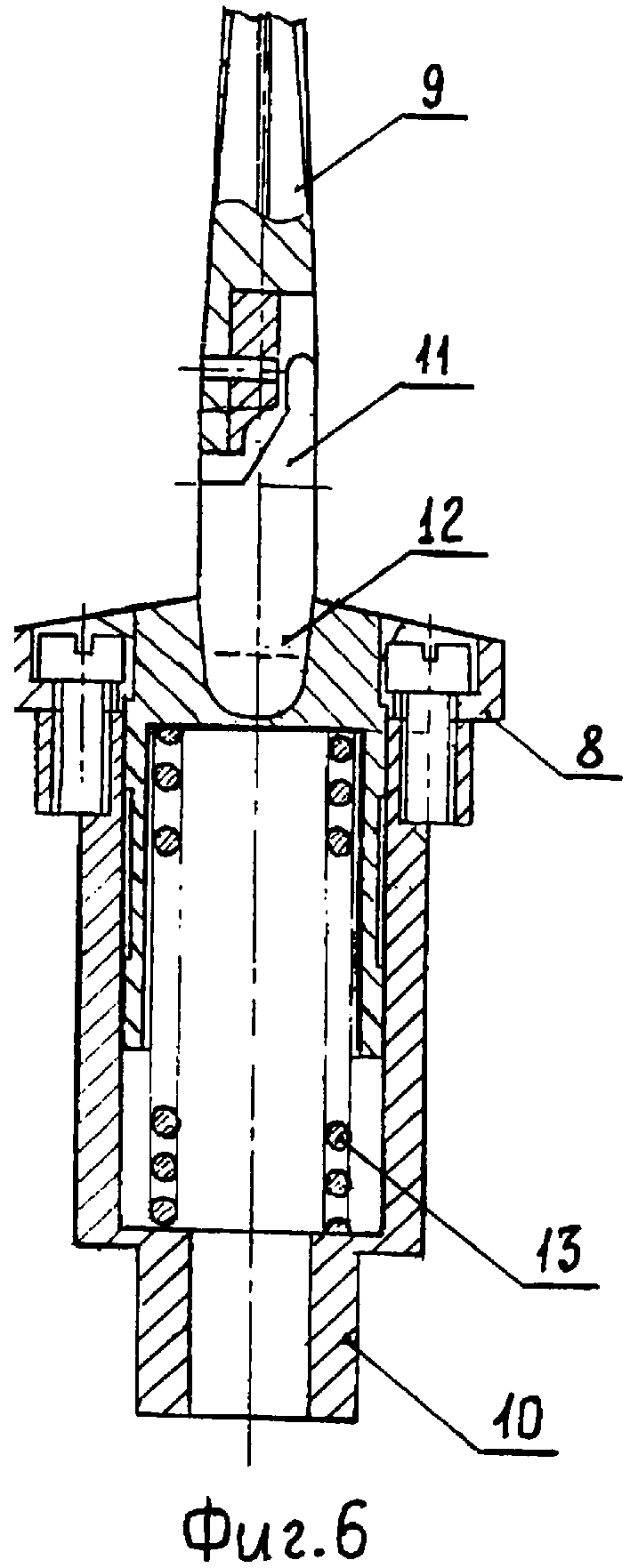
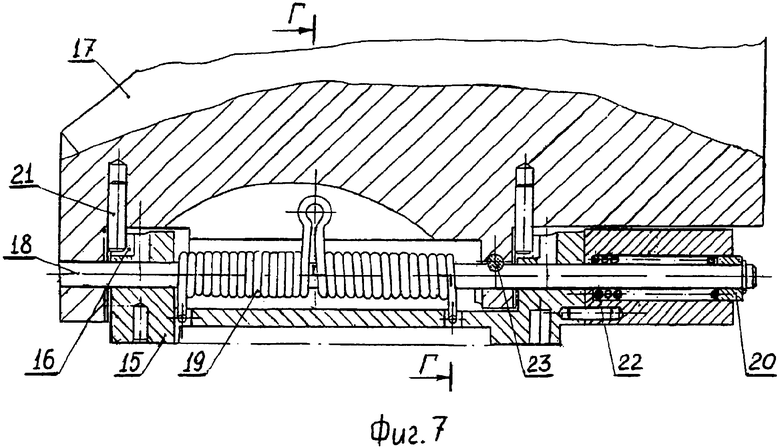
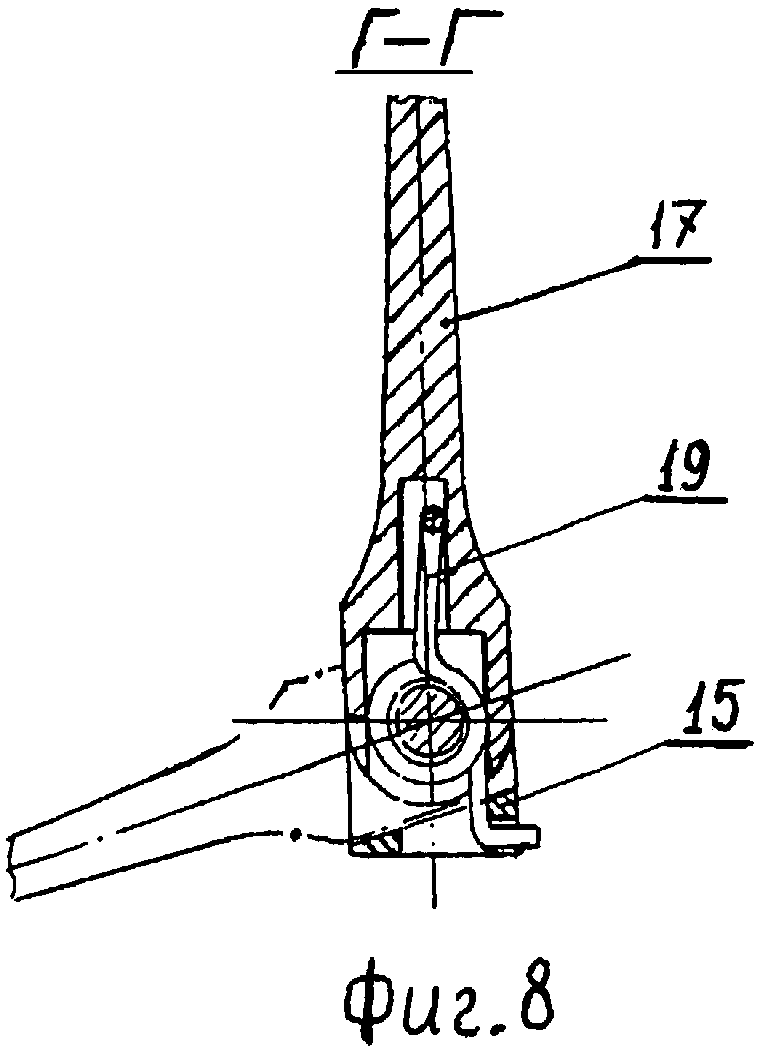
На Фиг.5, 6 приведен предложенный механизм раскрытия рулей (в сложенном и раскрытом положении соответственно), на Фиг.7 - механизм раскрытия стабилизаторов, а на Фиг.8 - сечение Г-Г (см. Фиг.7).
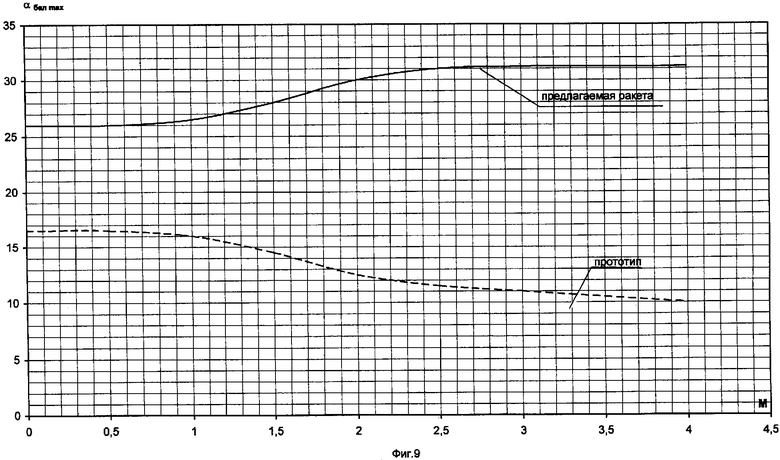
На Фиг.9 и 10 приведены (для прототипа и предлагаемой ракеты) соответственно зависимости максимального балансировочного угла атаки и зависимости максимальных перегрузок (для высоты около 5 км) от числа Маха.
Ракета согласно изобретению содержит корпус 1 с передним обтекателем 2.
Внутри корпуса 1 размещены аппаратура управления 3, боевое снаряжение 4 и двигатель 5. Ракета выполнена по «нормальной» аэродинамической схеме. В хвостовой части корпуса 1 размещены четыре руля 6 с дифференциальным управлением и четыре стабилизатора 7, установленные непосредственно перед рулями.
Складной руль 6 с механизмом его раскрытия состоит из корневой части 8, поворотной части 9, хвостовика 10, толкателя 11 с конусным отверстием 12, пружины 13 и двух полуосей 14.
Складной стабилизатор 7 с механизмом его раскрытия состоит из корневой части 15 с конусными отверстиями 16, поворотной части 17, цилиндрической винтовой пружины 19, втулки 20, двух штифтов 21, пружины 22 и стопора 23.
Функционирование ракеты после выброса из транспортно-пускового контейнера осуществляется следующим образом. Вначале раскрываются стабилизаторы 7 и рули 6. Раскрытие каждого руля осуществляется следующим образом. Толкатель 11, расположенный в хвостовике вала привода руля, за счет давления пружины сжатия 13 давит на поворотную часть 9 руля (в контейнере поворотная часть руля опирается на стенку контейнера). После разворота поворотной части руля в требуемое положение толкатель 11 продвигается еще на некоторое расстояние, обеспечивая вхождение элемента конструкции поворотной части 9 руля в конусное отверстие 12 на передней части толкателя 11 и осуществляя тем самым полную фиксацию руля 6 в его рабочем положении.
Раскрытие каждого стабилизатора 7 осуществляется следующим образом.
Закрученная цилиндрическая винтовая пружина 19 разворачивает поворотную часть 17 стабилизатора вокруг оси 18 в рабочее положение. После этого пружина сжатия 22, воздействуя на втулку 20, закрепленную на оси 18, перемещает указанную ось с закрепленной на ней стопором 23 поворотной частью 17 стабилизатора назад вдоль корпуса 1 до входа штифтов 21 в конусные отверстия 16, расположенные на корневой части 15 стабилизатора, и тем самым фиксирует стабилизатор в рабочем положении.
После раскрытия рулей и стабилизаторов ракета осуществляет полет в направлении цели в соответствии с полетным заданием и принятым законом наведения.
Как следует из вышепредставленных графиков (см. Фиг.9, 10), максимальные балансировочные углы атаки у предложенной ракеты в 1,6...2,5 раза больше, чем у прототипа, что в итоге обеспечило (даже при меньших размерах несущих поверхностей) возможности по созданию перегрузок, не меньшие, чем у прототипа, а на сверхзвуке (основной режим полета) даже большие.
Итак, предложенная управляемая зенитная ракета с указанными выше соотношениями размеров корпуса, стабилизаторов и рулей обладает меньшими размерами и массой для данного типа ракет, не уступая при этом известным ракетам по маневренным характеристикам. Данное техническое решение позволяет увеличить боезапас мобильных зенитных ракетных комплексов при сохранении их грузоподъемности и габаритных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА | 1996 |
|
RU2094748C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300075C1 |
| ЗЕНИТНАЯ РАКЕТА | 2020 |
|
RU2742897C1 |
| РАКЕТА | 2004 |
|
RU2270413C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2013 |
|
RU2537357C1 |
| РАКЕТА | 2019 |
|
RU2722329C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1996 |
|
RU2100766C1 |
| СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2016 |
|
RU2642693C2 |
Изобретение относится к области ракетной техники и может быть использовано в мобильных зенитных комплексах. Ракета содержит корпус, размещенные в нем двигательную установку, аппаратуру системы управления, боевое снаряжение, четыре складывающихся аэродинамических руля и четыре складывающихся стабилизатора. Аэродинамические рули установлены на хвостовой части корпуса, а стабилизаторы размещены перед рулями. Стабилизаторы выполнены с площадью меньшей площади рулей, а поворотные части стабилизаторов в процессе раскрытия выполнены с возможностью их сдвига вдоль корпуса в сторону рулей. Технический результат заключается в уменьшении массогабаритных параметров ракеты при обеспечении требуемых аэродинамических характеристик. 2 з.п. ф-лы, 10 ил.
λк=Lк/dk=14...16;
 ;
;
λс=lc 2/(2·Sc)=1,8...2,2;
ηс=bос/bкс=2,5...3,2;
 ;
;
λp=lp 2/(2·Sp)=1,5...2,0;
ηp=bор/bкр=1,8...3,0;
lовр=(13...15)·dk,
где Lk - длина корпуса ракеты, м;
λк - удлинение корпуса ракеты;
dk - диаметр корпуса ракеты, м;
Sм - площадь миделя корпуса ракеты, м2;
Sc - площадь стабилизатора, м2;
 - относительная площадь стабилизатора;
- относительная площадь стабилизатора;
λс - удлинение стабилизатора;
lс - размах стабилизатора, м;
ηс - сужение стабилизатора;
bос - бортовая хорда стабилизатора, м;
bкс - концевая хорда стабилизатора, м;
Sp - площадь руля, м2;
 - относительная площадь руля;
- относительная площадь руля;
λp - удлинение руля;
lp - размах руля, м;
ηp - сужение руля;
bop - бортовая хорда руля, м;
bкр - корневая хорда руля, м;
lовр - расстояние от носка корпуса ракеты до оси вращения руля, м.
| КАРПЕНКО А.В | |||
| Барабанный пресс для обезвоживания торфа | 1925 |
|
SU1943A1 |
| - СПб.: ПИКА, 1993, с.83, 84, 98 | |||
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 1998 |
|
RU2133446C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2000 |
|
RU2167390C1 |
| УСТРОЙСТВО ПОДКЛЮЧЕНИЯ ПРОВОДА В ОХРАННЫХ ПРИБОРАХ И ИЗВЕЩАТЕЛЯХ ПОЖАРНЫХ | 2006 |
|
RU2314612C1 |

