Текст описания приведен в факсимильном виде.































| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ОБЗОРА ПЕРЕДНЕЙ ПОЛУСФЕРЫ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2018 |
|
RU2679491C1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ ОЦЕНКИ ОБОДОВ КАЧЕНИЯ НА КОЛЕСАХ ДВИЖУЩИХСЯ ПОЕЗДОВ | 1999 |
|
RU2197724C2 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ЗАБЛАГОВРЕМЕННОГО ОПОВЕЩЕНИЯ О ЗАКРЫТИИ (СВОБОДНОСТИ) ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2014 |
|
RU2602517C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ РЕЛЬСОВОГО ПУТИ ИЛИ ПРЕПЯТСТВИЯ НА НЕМ | 2006 |
|
RU2443588C2 |
| Способ поездного сигнализирования и устройство для его осуществления | 2019 |
|
RU2708411C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ АВТОТРАНСПОРТА И ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ДЛЯ ПРЕДОТВРАЩЕНИЯ АВАРИЙ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2007 |
|
RU2352490C2 |
| ЦИФРОВЫЕ ПРЕЗЕНТАЦИИ АНАЛОГОВЫХ СИГНАЛОВ И УПРАВЛЯЮЩИХ СЛОВ, ИСПОЛЬЗУЯ РАЗЛИЧНЫЕ ФОРМАТЫ МНОГОУРОВНЕВОЙ МОДУЛЯЦИИ | 2016 |
|
RU2682299C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ПОКАЗАТЕЛЯ КАЧЕСТВА ЦИФРОВОГО СИГНАЛА | 2008 |
|
RU2468519C2 |
| Способ формирования результатов измерений на основании сигналов датчиков | 2014 |
|
RU2643746C2 |
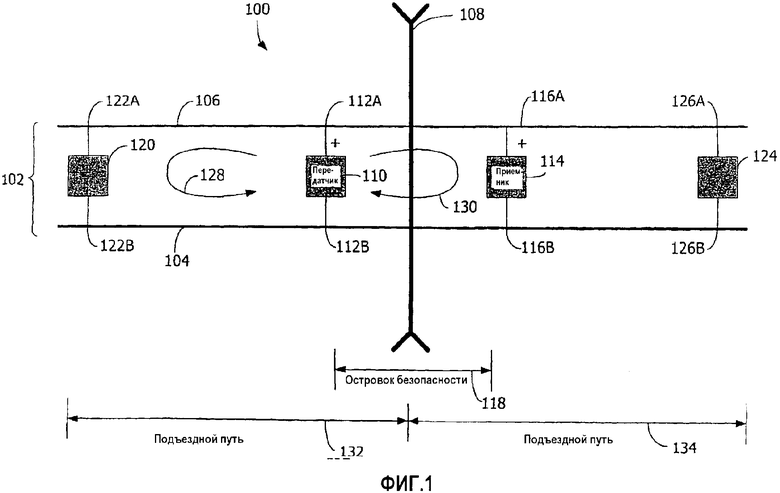





Изобретение относится к системам железнодорожных переездов, а более конкретно к автоматическому обнаружению присутствия и движения железнодорожного транспортного средства в пределах зоны обнаружения железнодорожного пути и управлению системой дорожных переездов. Система для автоматического обнаружения присутствия поезда, находящегося в пределах зоны обнаружения или наблюдения железнодорожного пути (102), связанной с железнодорожным переездом, содержит первый блок (610) передатчика, который передает сигнал обнаружения, приемник (615), который принимает сигнал обнаружения, причем приемник (615) принимает один или более сигналов. Процессор (604), подключенный к блоку приемника, конфигурирован с обеспечением возможности обработки принимаемых сигналов и определения присутствия, отсутствия или движения поезда или сигнала в пределах зоны обнаружения или наблюдения. Процессор (604) конфигурирован с обеспечением возможности инициирования действий, когда он устанавливает присутствие поезда либо одного или более сигналов обнаружения. Изобретение также относится к способу автоматического обнаружения присутствия поезда, находящегося в пределах зоны наблюдения, связанной с железнодорожным переездом, где происходит пересечение шоссе на одном уровне с ним. Техническим результатом изобретения является более точное обнаружение поездов, приближающихся к зоне обнаружения на железнодорожном переезде, пересекающих эту зону, стоящих в ее пределах и покидающих ее, исключая все возможные сигналы и шум. 2 н. и 8 з.п. ф-лы, 7 ил.
присутствия и положения железнодорожного транспортного средства в пределах зоны обнаружения железнодорожного пути (102), имеющего пару рельсов (106) и идентифицированное полное сопротивление в пределах зоны обнаружения, причем присутствие и/или положение железнодорожного транспортного средства в пределах зоны обнаружения изменяет полное сопротивление пути(102), содержащая
первый передатчик (610), подсоединенный к рельсам (106) железнодорожного пути (102) и предназначенный для передачи по рельсам (106) первого сигнала, имеющего определенную амплитуду и определенную рабочую частоту,
второй передатчик (665), подсоединенный к рельсам (106) железнодорожного пути (102) и предназначенный для передачи по рельсам (106) второго сигнала, имеющего определенную амплитуду и определенную рабочую частоту,
приемник (615), подсоединенный к рельсам и предназначенный для приема первого и второго сигналов,
первый блок (617) сбора данных, подключенный к первому передатчику (610) и приемнику (615) и обеспечивающий в ответ на передаваемый первый сигнал и принимаемый первый сигнал формирование первых мультиплексированных аналоговых сигналов (622), которые представляют передаваемый первый сигнал и принимаемый первый сигнал,
второй блок (671) сбора данных, подключенный ко второму передатчику (664) и обеспечивающий в ответ на передаваемый второй сигнал и принимаемый второй сигнал формирование вторых мультиплексированных аналоговых сигналов (675), которые представляют передаваемый второй сигнал и принимаемый второй сигнал,
первый преобразователь (662), предназначенный для преобразования первых мультиплексированных аналоговых сигналов (622) в совокупность первых цифровых сигналов, которые соответствуют передаваемому первому сигналу и принимаемому первому сигналу,
второй преобразователь (676), предназначенный для преобразования вторых мультиплексированных аналоговых сигналов (675) в совокупность вторых цифровых сигналов, которые соответствуют передаваемому второму сигналу и принимаемому второму сигналу,
первый процессор (604) цифровых сигналов, обеспечивающий в ответ на первые цифровые сигналы обработку первых цифровых сигналов для определения, находится ли частота принимаемого первого сигнала в пределах первого диапазона частот полосы пропускания, при этом упомянутый первый диапазон частот полосы пропускания зависит от частоты передаваемого первого сигнала,
второй процессор (654) цифровых сигналов, обеспечивающий в ответ на вторые цифровые сигналы обработку вторых цифровых сигналов для определения, находится ли частота принимаемого второго сигнала в пределах второго диапазона частот полосы пропускания, соседнего с первым диапазоном частот полосы пропускания, при этом упомянутый второй диапазон частот полосы пропускания зависит от частоты передаваемого второго сигнала, и
процессор, обеспечивающий в ответ на первые цифровые сигналы обработку первых цифровых сигналов для определения частоты и амплитуды передаваемого первого сигнала и принимаемого первого сигнала для определения полного сопротивления пути (102) как показания присутствия и/или положения поезда в пределах зоны обнаружения подъездного пути, когда принимаемый первый сигнал находится в пределах первого диапазона частот полосы пропускания, при этом упомянутый процессор обеспечивает в ответ на вторые цифровые сигналы обработку вторых цифровых сигналов для определения, меньше ли амплитуда второго сигнала, чем пороговое значение, как показание присутствия поезда в пределах зоны обнаружения островка безопасности, когда принимаемый второй сигнал находится в пределах второго диапазона частот полосы пропускания.
первый фильтр (618), подключенный к цепи (616) обратной связи и предназначенный для фильтрации обнаруженного первого передаваемого сигнала напряжения, обнаруженного первого передаваемого сигнала тока и обнаруженного первого принимаемого сигнала напряжения,
первый мультиплексор (620), подключенный к первому фильтру (618) и предназначенный для мультиплексирования отфильтрованного первого передаваемого сигнала напряжения, отфильтрованного первого передаваемого сигнала тока и отфильтрованного первого принимаемого сигнала напряжения, и для формирования первых мультиплексированных аналоговых сигналов (622), и при этом процессор предназначен для вычисления полного сопротивления пути в зоне обнаружения подъездного пути в зависимости от разности между первым передаваемым сигналом напряжения, первым принимаемым сигналом напряжения и первым передаваемым сигналом тока.
второй фильтр (672), подключенный к цепи обратной связи и предназначенный для фильтрации обнаруженного второго передаваемого сигнала напряжения и обнаруженного второго принимаемого сигнала напряжения, и
второй мультиплексор (674), подключенный ко второму фильтру (672) и предназначенный для мультиплексирования отфильтрованного второго передаваемого сигнала напряжения и отфильтрованного второго принимаемого сигнала напряжения и для генерирования вторых мультиплексированных аналоговых сигналов (675).
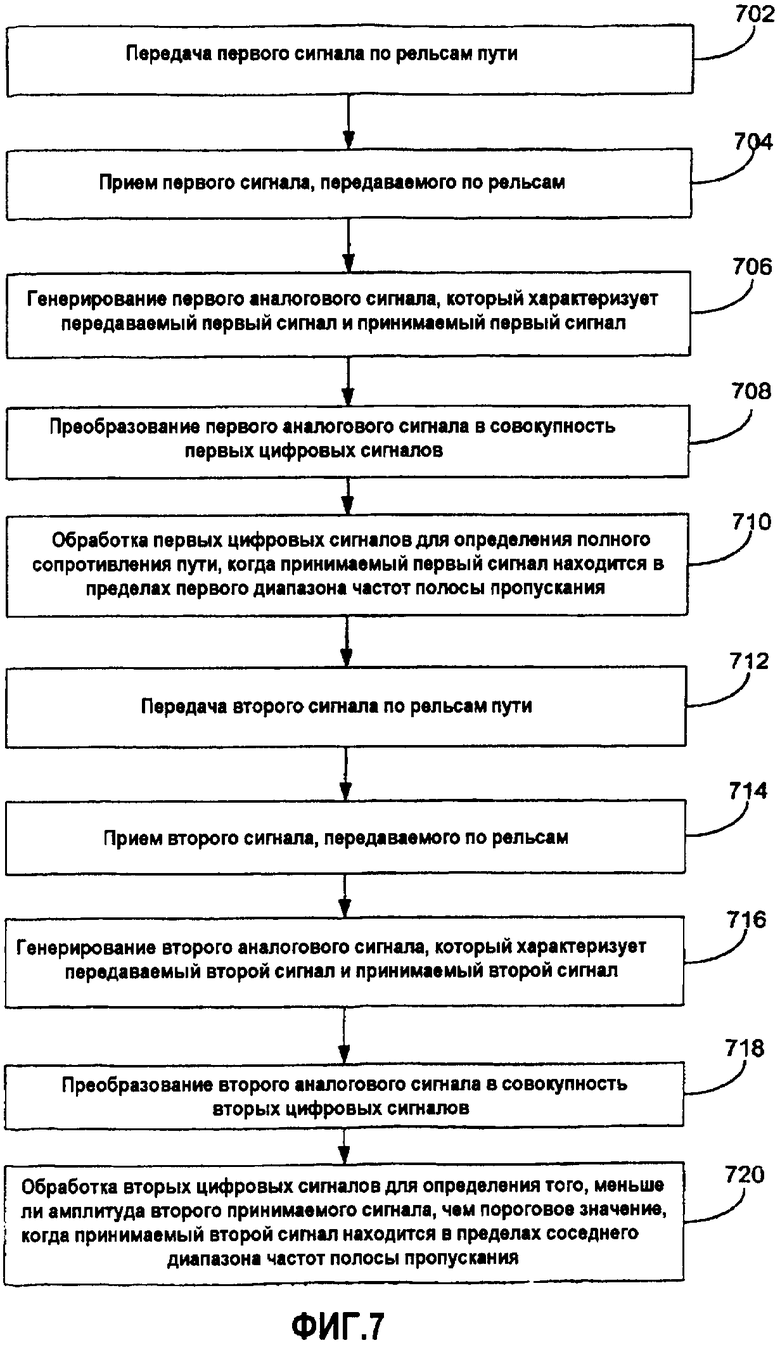
осуществляют передачу по рельсам первого сигнала, имеющего определенную амплитуду и определенную рабочую частоту,
осуществляют прием первого сигнала, передаваемого по рельсам,
генерируют первый аналоговый сигнал, который отображает передаваемый первый сигнал и принимаемый первый сигнал,
преобразуют первый аналоговый сигнал в совокупность первых цифровых сигналов, которые соответствуют передаваемому первому сигналу и принимаемому первому сигналу, и
обрабатывают первые цифровые сигналы для определения частоты и амплитуды передаваемого первого сигнала и принимаемого первого сигнала, чтобы определить полное сопротивление пути как показатель присутствия и/или положения поезда в пределах зоны обнаружения подъездного пути.
принимают второй сигнал, передаваемый по рельсам,
формируют второй аналоговый сигнал, который характеризует передаваемый второй сигнал и принимаемый второй сигнал,
преобразуют второй аналоговый сигнал в совокупность вторых цифровых сигналов, которые соответствуют передаваемому второму сигналу и принимаемому второму сигналу,
осуществляют обработку вторых цифровых сигналов для определения того, меньше ли амплитуда второго сигнала, чем пороговое значение, как показатель присутствия поезда в пределах зоны обнаружения островка безопасности.
| Способ изготовления металлополимеров | 1975 |
|
SU539046A1 |
| СПОСОБ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2025355C1 |
| US 4851700 А, 08.04.1986 | |||
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 1999 |
|
RU2173276C2 |
| Рельсовая цепь | 1991 |
|
SU1799787A1 |

