Изобретение относится к судостроению, а именно к водометным движителям подводных судов (подводных транспортов, подводных аппаратов и т.п.). Может быть применено также для надводных судов со сравнительно большой осадкой, кормовой бульбой.
Известен водометный движитель, содержащий осевой насос с лопастным рабочим колесом, размещенным в насадке в виде кольцевого крыла соосно с кормовой оконечностью судна [1].
Недостатки аналога - сравнительно большие гидравлические сопротивления и низкий КПД, большой расход энергии на движение судна.
Известен водометный движитель, содержащий ускоритель потока (насос), размещенный в направляющей насадке в виде кольцевого крыла соосно с кормовой оконечностью судна [2],который принят за прототип.
Недостатки прототипа - большой расход энергии на движение судна, низкий по сравнению с гребным винтом КПД.
Известен ускоритель текучей среды, содержащий, по крайней мере, два сопла на одной оси, при этом, по меньшей мере, одно сопло жестко или с возможностью осевого перемещения соосно введено в следующее по ходу движения текучей среды сопло с образованием между соплами полости, причем не менее чем одна полость сообщена с устройствами подачи и отсоса текучей среды, по меньшей мере, в одной полости размещены средства ионизации текучей среды, во всех полостях установлены датчики давления, а во входном и выходном реактивном соплах - датчики скорости [3].
Недостатки ускорителя текучей среды - в основном ускоритель может быть применен только для ускорения газа (воздуха) при любых его положениях в пространстве. В то же время для ускорения движения жидкости (воды, смеси воды с газами, нефтепродуктов и т.п.) конструкция ускорителя газа (воздуха) может быть использована только при вертикальном ее расположении и симметрии относительно вертикальной оси. Тогда в каждой поперечной плоскости ускорителя процесс воздействия на жидкость, в частности, процесс эжектирования текучей среды из полостей будет равномерным. При наклонном к вертикали или горизонтальном расположении оси ускорителя жидкость стремится заполнить все находящиеся внизу объемы, симметрия процессов воздействия на жидкость нарушается. Создать вакуумированные полости в верхней части устройства гораздо легче, чем в нижней. Конструкция ускорения газа для ускорения жидкости оказывается нерациональной.
Технический результат изобретения состоит в существенном снижении расхода углеводородного топлива (не менее чем 70-80%) в отсутствие вала, проходящего через корпус судна и/или обшивку водовода, в уменьшении гидравлического сопротивления, повышении КПД движителя.
Технический результат достигается тем, что водометный движитель подводного судна содержит в направляющей насадке соосно с кормовой оконечностью судна ускоритель потока текучей среды, включающий, по крайней мере, два герметичных между собой сопла на одной оси, при этом, по меньшей мере, одно сопло жестко или с возможностью осевого перемещения соосно введено в следующее по ходу движения текучей среды сопло с образованием между соплами полости, причем не менее чем одна полость сообщена с устройствами подачи и отсоса текучей среды для регулировки скорости на выходе или мощности ускорителя, по меньшей мере, в одной полости размещены средства ионизации текучей среды, обеспечивающие ее ионизацию в полости и движение в ускорителе с эжекцией текучей среды через входное сечение направляющей насадки, во всех полостях установлены датчики давления, а во входном и выходном реактивном соплах - датчики скорости. По изобретению в качестве текучей среды принята смесь воды и газов (воздуха) в движителе используется, по крайней мере, один ускоритель. В полости ускорителя, в которой предусмотрены отсос и подача текучей среды, дополнительно размещены электроды для осуществления в текучей среде электрогидравлических ударов. При этом ускоритель снабжен блоком формирования электрогидравлического удара, выходы которого соединены с электродами. Ускоритель может быть размещен горизонтально, причем из известной симметричной конструкции ускорителя потока газа (воздуха) используется только верхняя часть, отсекаемая горизонтальной плоскостью, параллельной плоскости, проходящей через центральную ось устройства. Конструкция ускорителя рассчитывается на задаваемую максимальную скорость потока на его выходе или задаваемую мощность. При этом меньшие значения скорости получают путем варьирования величины вакуума в полостях с помощью устройств подачи и отсоса текучей среды, а также за счет изменения амплитуды и/или частоты процессов ионизации текучей среды, а также электрогидравлических ударов текучей среды в полости.
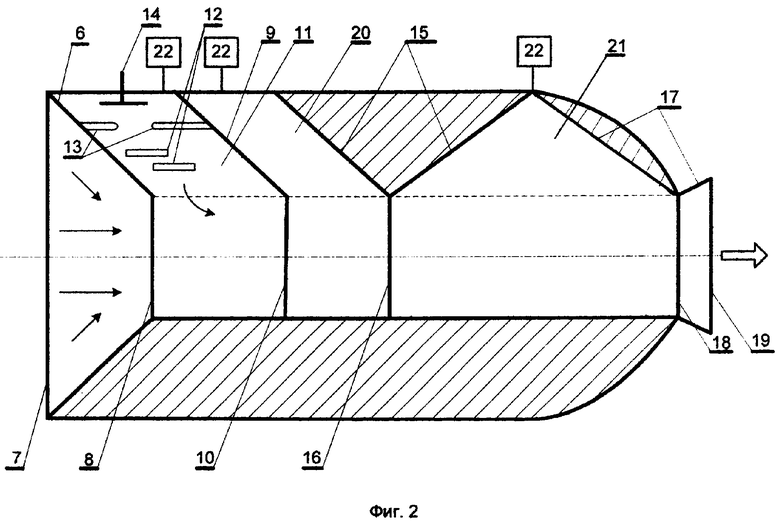
Схематически предлагаемое изобретение изображено на фиг.1 (показана общая схема ускорителя и кормы судна), на фиг.2 представлена схема ускорителя.
Водометный движитель подводного судна (фиг.1) состоит из направляющей насадки 1 на корме судна 2, с входным 3 и выходным 4 отверстием и ускорителя потока текучей среды 5.
Ускоритель потока текучей среды (в общем случае смесь воды и газов) (фиг.2) содержит размещенные соосно сопло 6 с входным сечением 7 и критическим сечением 8, верхняя часть сопла 9 с критическим сечением 10 и полость 11 между этими соплами. В полости 11 помещены блоки 12 ионизации текучей среды 12, электроды 13 блока формирования электрогидравлического удара (не показаны) и клапаны 14. Далее по ходу движения текучей среды следуют сопло Лаваля 15 с критическим сечением 16 и сопло Лаваля 17 с критическим сечением 18 и выходным соплом 19. Между соплами 9 и 15 имеется полость 20, между соплами Лаваля 15 и 17 - полость 21. При этом сопла 6 и 9, а также 9 и 15, 15 и 17 соединены между собой герметично. К полостям 11, 20 и 21 подсоединены устройства 22 отсоса и подачи текучей среды внутрь этих полостей. Датчики и блок управления на чертежах не показаны.
Устройство работает следующим образом. Предварительно ускоритель 5 заполняется водой (возможно наличие воздушной подушки). Возможны два способа запуска ускорителя: с использованием внешнего нагнетателя текучей среды под давлением и без него. В первом случае нагнетаемая в ускоритель текучая среда должна иметь скорость, достаточную для последующего самовакуумирования [5] ускорителя. Последняя зависит от конструкции самого ускорителя. Во втором случае производят ионизацию воды в полости 11 с использованием одного или нескольких средств ионизации 12, в том числе с помощью электродов 13 блока формирования электрогидравлических ударов определенной амплитуды и частоты. В результате ионизации и ударного воздействия молекулы и атомы текучей среды (здесь вода и возможно воздух) частично разрушаются с выделением большого количества тепла и кинетической энергии [4]. При закрытых клапанах 14 поток расширенной в полости 11 текучей среды (воды и газов) вылетает к центральной оси устройства, эжектируя при этом забортную воду через входное сечение 3. Далее клапаны 14 открываются и в полость 11 подается текучая среда (забортная вода или воздух). При необходимости производят отсос воды и газов из полости. После этого клапаны закрываются. Частота выполнения таких операций (пульсаций) регулируется и может быть достаточно высокой, чтобы обеспечить квазинепрерывный характер работы. Когда скорость потока текучей среды (воды и газа), идущей из полости 11, с учетом эжектируемой забортной воды (через сопло 3) между сечениями 10 и 16 будет достаточной для эжекции воды из полости 20 в последней возникнет некоторое разрежение. Оно будет способствовать повышению перепада давлений между сечениями 8 и 10 и тем самым увеличению скорости истечения и расхода забортной воды через входное сечение 8. Это в свою очередь приведет к усилению вакуумирования полости 20. Такие процессы будут происходить до тех пор, пока не перестанет повышаться степень вакуума в полости. Что касается вопроса управления работой ускорителя, то возможны два варианта. Первый, когда величиной вакуума в полостях 20 и 21 не управляют, тогда скорость потока будет наибольшей при технически возможной степени вакуума (за счет самовакуумирования [5]). Второй вариант, когда, наоборот, величину вакуума назначают и поддерживают в полостях 20 и 21 искусственно, скорость потока при этом будет управляемой. Аналогично и по отношению к полости 11. При установлении постоянной скорости потока в ускорителе 5 частоту пульсаций (ионизации) в полости 11 постепенно уменьшают вплоть до полного выключения. Ускоритель и движитель в целом начинают работать только за счет засасывания в сопла 20 и 21 текучей среды (забортной воды) через отверстие 3 вакуумом этих полостей. После прекращения пульсаций возникает разрежение и в полости 11. При вакуумировании полостей 11, 20 и 21 в выходном сопле 19 возникнет устойчивый реактивный поток текучей среды (в основном воды), создающий силу тяги судна. Насос или другое внешнее устройство для разгона текучей среды в ускорителе (ускорителях) движителя отключают.
Регулировка скорости (мощности) потока текучей среды на выходе из движителя (ускорителя) в реальном времени в первую очередь производится путем управления величиной вакуума в полостях 11, 20, 21. Для этого предусмотрены устройства 22 для отсоса текучей среды (газов, например воздуха) и подачи (впрыскивания) текучей среды (воды, воздуха). Регулировка скорости потока на выходе движителя (ускорителя) может быть осуществлена и/или изменением амплитуд и частоты пульсаций процесса ионизации текучей среды в полости 11, а также процесса электрогидравлического удара в текучей среде. Для управления работой ускорителя используются показания датчиков давления, размещенных в полостях, датчиков скорости потока на выходе и входе из ускорителя, а также показания устройств 22, поступающие в блок управления работой ускорителя.
Рассмотренный режим работы ускорителя не единственный. Возможен вариант работы, при котором подача (впрыскивание) или отсос текучей среды в полости и/или производство электрогидравлических ударов в текучей среде полости 11 производятся непрерывно. В этом случае энергия, выделяемая при разложении молекул и атомов текучей среды (воды и газов) в полости 11 будет дополнять, усиливать энергетический эффект движения текучей среды в ускорителе, полученный только от вакуумирования полостей 11, 20 и 21.
Затраты энергии на работу ускорителя сравнительно небольшие. Энергия тратится на первоначальный разгон текучей среды внутри ускорителя до заданной скорости, в том числе на ионизацию текучей среды и процесс электрогидравлического удара в текучей среде в полости 11, а также на компенсацию гидравлических потерь в ускорителе и др. Кроме этого энергия расходуется на работу механизмов открытия-закрытия клапанов 14, а также работу устройств 22. Поддержание же задаваемой скорости струи на выходе движителя осуществляется, главным образом, за счет вакуума в полостях ускорителя.
Технический результат изобретения - существенное снижение затраты энергии на движение судна (не менее 70-80%), следовательно, возможность увеличить скорость хода и/или дальность плавания, снизить запасы топлива, повысить КПД движителя.
Источники информации
1. Заявка Японии №51-199156, кл. В63С 8/12, 1976 г.
2. Патент РФ №2057684, кл. В63 11/08, В63Н 11/02, В63С 8/12, опубл. 1992 г.
3. Патент РФ №2287695, опубл. 2006 г.
4. Е.И.Андреев, О.А.Ключарев, А.П.Смирнов, Р.А.Давиденко. Естественная энергетика. - СПб: Нестор, 2000. - 122 с.
5. Патент WO 03/25379, кл. 7 F2К 7/00, опубл. 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ СУДНА | 2007 |
|
RU2345926C2 |
| УСКОРИТЕЛЬ ПОТОКА ЖИДКОСТИ | 2007 |
|
RU2343086C1 |
| ТРАНСЗВУКОВОЙ ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ СУДНА | 2013 |
|
RU2534155C2 |
| НОС СУДНА | 2007 |
|
RU2336193C1 |
| УСТРОЙСТВО, ПОВЫШАЮЩЕЕ ПРОПУЛЬСИВНЫЕ ПОКАЗАТЕЛИ ВОДОМЕТНЫХ ДВИЖИТЕЛЕЙ | 2003 |
|
RU2247058C1 |
| АКТИВНОЕ КРЫЛО | 2004 |
|
RU2281877C1 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ ПОДВОДНОГО СУДНА | 2001 |
|
RU2213677C2 |
| ВЫСОКОСКОРОСТНОЕ СУДНО ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ПОВЕРХНОСТИ ВОДЫ, НАД ПОВЕРХНОСТЬЮ ВОДЫ И ПОД ВОДОЙ | 2017 |
|
RU2669249C1 |
| ГАЗОВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2285635C2 |
| МНОГОСТРУЙНЫЙ РЕАКТИВНЫЙ ДВИЖИТЕЛЬ ДЛЯ ВЫСОКОСКОРОСТНЫХ СУДОВ, ДВИЖУЩИХСЯ ПО ПОВЕРХНОСТИ ВОДЫ, НАД ПОВЕРХНОСТЬЮ ВОДЫ И ПОД ВОДОЙ (ВАРИАНТЫ) | 2017 |
|
RU2651949C1 |
Изобретение относится к судостроению, а именно к водометным движителям подводных судов (подводных транспортов, подводных аппаратов и т.п.), и может быть применено также для надводных судов и плавающих средств со сравнительно большой осадкой, с кормовой бульбой. Водометный движитель подводного судна содержит, по крайней мере, один ускоритель потока текучей среды в направляющей насадке соосно с кормовой оконечностью судна и включает в себя, по крайней мере, два сопла на одной оси. По меньшей мере, одно сопло соосно введено в следующее по ходу движения текучей среды сопло с образованием между соплами полости. При этом не менее чем одна полость сообщена с устройствами подачи и отсоса текучей среды. По меньшей мере, в одной полости с устройствами для подачи и отсоса текучей среды размещены средства ионизации текучей среды. Во всех полостях установлены датчики давления, а во входном и выходном реактивном соплах - датчики скорости. В полости с устройствами подачи и отсоса текучей среды размещены электроды для осуществления электрогидравлических ударов в текучей среде. Технический результат - существенное снижение затрат расхода углеводородного топлива (не менее 70-80%) в отсутствии вала, проходящего через корпус судна и/или обшивку водовода, уменьшение гидравлического сопротивления, повышение КПД движителя. 2 ил.
Водометный движитель подводного судна, содержащий ускоритель потока текучей среды в направляющей насадке соосно с кормовой оконечностью судна, включающий в себя, по крайней мере, два сопла на одной оси, при этом, по меньшей мере, одно сопло соосно введено в следующее по ходу движения текучей среды сопло с образованием между соплами полости, причем не менее чем одна полость сообщена с устройствами подачи и отсоса текучей среды, по меньшей мере, в одной полости размещены средства ионизации текучей среды, отличающийся тем, что в полости с устройствами подачи и отсоса текучей среды размещены электроды для осуществления электрогидравлического удара в текучей среде, которые соединены с выходами блока формирования электрогидравлических ударов в текучей среде.
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2057684C1 |
| ПРЯМОТОЧНЫЙ ГАЗОВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2285636C2 |
| Система управления ударного робототехнического комплекса военного назначения | 2022 |
|
RU2791949C1 |

