Изобретение предназначено для повышения эффективности управления ударного робототехнического комплекса военного назначения (РТК ВН), оснащенного несколькими видами оружия и приемником спутниковой системой навигации, для уничтожения нескольких целей, обнаруженных внешними средствами разведки в ходе боевых действий.
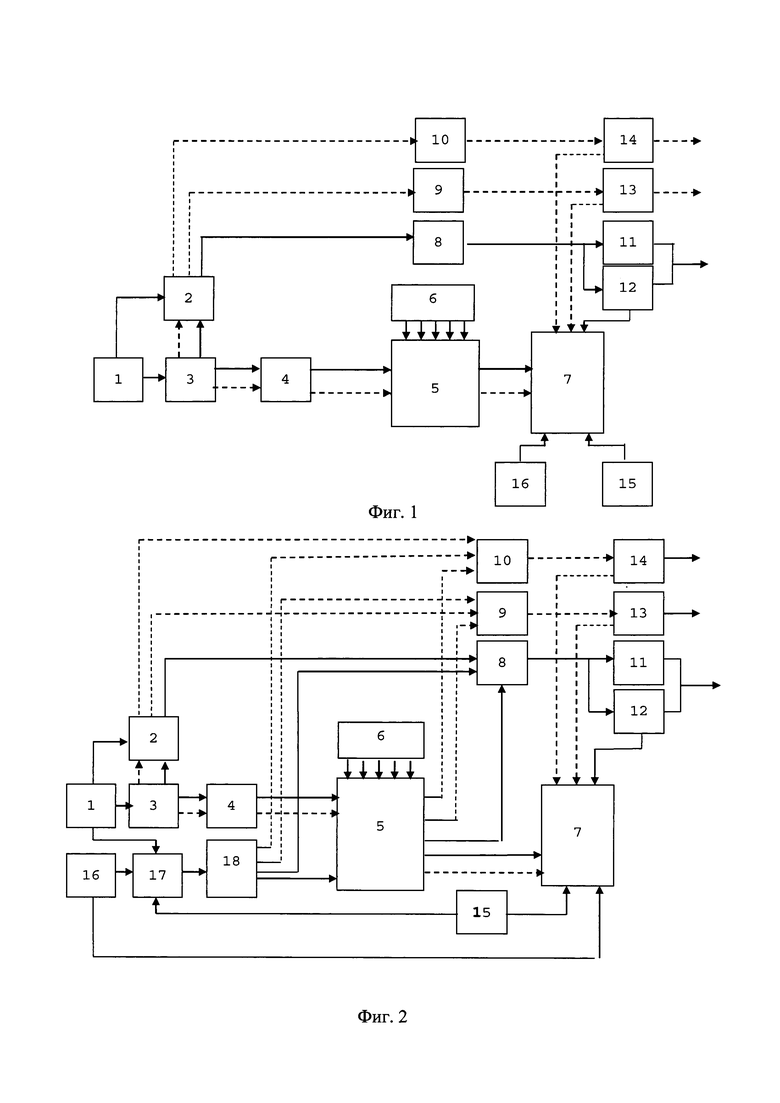
Известны системы управления ударных РТК ВН, оснащенных несколькими видами оружия для уничтожения целей, например, самоходного многоцелевого робота обеспечения боевых действий, содержащего боевой модуль (БМ) с установленными в нем 30-мм автоматической пушкой и спаренным с ней 7,62-мм пулеметом, 30-мм автоматическим гранатометом (АГ) и противотанковым ракетным комплексом (ПТРК). Подавление и уничтожение живой силы противника, обнаруженной РТК ВН или внешними разведывательными средствами, осуществляется последовательным применением вооружения БМ, что иллюстрируется фиг. 1, где: 1 - оператор; 2 - джойстик управления наведением вооружения; 3 - кнопка выбора типа оружия на пульте дистанционного управления (ПДУ) РТК ВН; 4 - лазерный дальномер; 5 - баллистический вычислитель; 6 - датчики условий стрельбы; 7 - экран ПДУ; 8 - привод наведения 30-мм пушки и пулемета; 9 - привод наведения гранатомета; 10 - привод наведения ПТРК, 11 – 30-мм пушка, 12 - пулемет; 13 - гранатомет; 14 ПТРК, 15 - внешние средства разведки, 16 - приемник спутниковой системы навигации РТК ВН. Ведение стрельбы по целям с существующей системой управления огнем заключается в следующем. При обнаружении цели оператор (1) кнопкой (3) выбирает тип оружия (например, 30-мм пушку) для поражения цели, наводит джойстиком (2) лазерный дальномер (4) на цель и измеряет дальность до нее. Сигнал дальности поступает в баллистический вычислитель (5), который в соответствии с баллистикой выбранного типа оружия и с учетом сигналов датчиков условий стрельбы (6) формирует сигналы выноса точки прицеливания по горизонтали и вертикали, которые формируют на экране ПДУ (7) положение прицельной марки. Оператор (1) с помощью джойстика (2) воздействует на привод (8) выбранного оружия – 30-мм пушки (11). При перемещении пушки (11) перемещается и прицельная марка на экране (7) ПДУ. При наложении прицельной марки на цель оператор производит ее поражение из пушки (11).
В случае обнаружения внешними средствами разведки новых целей в период поражения РТК ВН первой цели положение новых целей, определенное с помощью обработки информации от внешних средств разведки (15) и приемника спутниковой системы навигации (16), отражается на экране ПДУ (7). Закончив стрельбу по первой цели, оператор выбирает новую цель для поражения. При этом оператор кнопкой (3) на ПДУ выбирает вид оружия, например ПТРК, а затем выполняет такие же операции, что и при стрельбе по предыдущей цели: снова наводит джойстиком (2) лазерный дальномер (4) на цель и измеряет дальность до нее. Сигнал дальности поступает в баллистический вычислитель (5), который в соответствии с баллистикой ПТРК и с учетом сигналов датчиков условий стрельбу (6) формирует сигналы выноса точки прицеливания ПТРК по горизонтали и вертикали, которые формируют на экране ПДУ (7) положение прицельной марки. Оператор (1) с помощью джойстика (2) воздействует на привод (10) ПТРК (14). При перемещении ПТРК (14) перемещается и прицельная марка на экране (7) ПДУ. При наложении прицельной марки на цель оператор пуском ПТУР производит ее поражение.
Аналогично система управления ударного РТК ВН действует при использовании других видов оружия БМ при поражении новых целей, обнаруженных внешними средствами разведки.
Недостатком существующей системы управления ударного РТК ВН, оснащенного несколькими образцами вооружения является то, что управление образцами вооружения оператор при последовательном поражении нескольких, обнаруженных внешними средствами разведки, осуществляет, переходя от управления одним типом оружия к управлению другим типом оружия, каждый раз затрачивая большое время на подготовку нового оружия к стрельбе.
Целью настоящего изобретения является обеспечение повышения эффективности управления вооружением ударного РТК ВН за счет сокращения времени на его подготовку к последовательному поражению нескольких целей, обнаруженных внешними средствами разведки.
Указанная цель достигается включением в систему управления ударного РТК ВН блока селекции целей и оружия с информационной панелью и блока выработки сигналов управления оружием. На первый вход блока селекции целей и оружия поступает информация об обнаруженных целях с внешних средств разведки, на второй вход блока селекции целей и оружия поступает информация с приемника системы спутниковой навигации, на третий вход подается команда выбора цели от оператора, а выход связан с входом блока выработки сигналов управления оружием, выходы которого соединены с баллистическим вычислителем и приводами наведения оружия.
Последовательное поражение нескольких целей, обнаруженных внешними средствами разведки, с предлагаемой системой управления ударного РТК ВН иллюстрируется фиг. 2. Подготовка к стрельбе и поражение первой цели, обнаруженной оператором, производится так же, как и в существующей системе, что описана выше с использованием фиг. 1.
В случае обнаружения внешними средствами разведки (15) новых целей в период поражения ударным РТК ВН первой цели информация о типах новых целей и их координатах, поступает в блок селекции целей и оружия (17). Одновременно в блок (17) от приемника спутниковой системы навигации (16) поступает информация о текущих координатах ударного РТК ВН. В блоке (17) на основе полученной информации рассчитываются дальности и угловое положение целей относительно РТК ВН, а затем определяются цели, которые ударный РТК ВН способен поразить, и тип необходимого для поражения каждой цели оружия. Информация об этих целях отражается на информационной панели блока (17) и поступает в блок выработки сигналов управления оружием (18), который вырабатывает сигналы управления, пропорциональные углам рассогласования между направлениями на новые цели и текущим направлением оружия. Закончив стрельбу по первой цели, оператор выбирает для поражения новую цель на информационной панели блока (17). При этом сигнал с блока (18) поступает на привод наведения оружия, например на привод (8) 30-мм пушки (11), требуемой для поражения выбранной цели. Привод (8) автоматически совмещает направление пушки (11) с направлением на цель. Одновременно сигнал с блока (18) поступает, в баллистический вычислитель (5), который в соответствии с баллистикой 30-мм пушки и с учетом сигналов датчиков условий стрельбы (6) формирует сигналы выноса точки прицеливания пушки по горизонтали и вертикали, которые формируют на экране ПДУ (7) положение прицельной марки. Оператор (1) с помощью джойстика (2) уточняет наводку пушки, совмещая прицельную марки с целью, и производит поражение цели.
Аналогично система управления ударного РТК ВН действует при использовании других видов оружия БМ при поражении новых целей, обнаруженных внешними средствами разведки.
При использовании предлагаемой системы управления время подготовки оружия ударного РТК к последовательному поражению нескольких целей, обнаруженных внешними средствами разведки, сокращается за счет исключения процессов оценки возможности поражения указанных целей, измерения дальности, выбора типа оружия и уменьшения времени совмещения оружия с направлением нацель.
Техническим решением предложенного изобретения является включением в систему управления ударного РТК ВН блока селекции целей и оружия с информационной панелью и блока выработки сигналов управления оружием.
Техническим результатом предложенного изобретения является обеспечение повышения эффективности управления вооружением ударного РТК ВН за счет сокращения времени на его подготовку к последовательному поражению нескольких целей, обнаруженных внешними средствами разведки.
Литература
Роботизация и военное дело будущего / М.С. Барабанов, С. Бендетт, С.А. Денисенцев, А.В. Лавров, М.С. Сухарева, Д.В. Федутинов, М.Ю. Шеповаленко; под ред. В.Н. Бондарева. - М.: Центр анализа стратегий и технологий, 2021. - 232 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления огнем робототехнического комплекса | 2020 |
|
RU2749973C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
Система управления ударного РТК ВН содержит дальномер, вычислитель, приводы оружия, датчики внешних условий, средства спутниковой навигации. Дополнительно установлены блок селекции целей и оружия с информационной панелью и блок выработки сигналов управления оружием. На первый вход блока селекции целей и оружия поступает информация об обнаруженных целях с внешних средств разведки, на второй вход блока селекции целей и оружия поступает информация с приемника системы спутниковой навигации, на третий вход подается команда выбора цели от оператора, а выход связан с входом блока выработки сигналов управления оружием, выходы которого соединены с баллистическим вычислителем и приводами наведения оружия. В случае обнаружения внешними средствами разведки новых целей информация о них преобразуется в сигналы управления, которые обеспечивают после поражения предыдущей цели автоматическое совмещение оружие и прицельной марки с направлением на выбранную оператором новую цель. Технический результат – повышение эффективности управления вооружением РТК ВН, сокращение времени подготовки РТК ВН к последовательному поражению нескольких целей. 2 ил.
Система управления ударного робототехнического комплекса военного назначения (РТК ВН), оснащенного несколькими видами оружия и приемником спутниковой системы навигации, содержащая пульт дистанционного управления РТК ВН с джойстиком управления наведением вооружения, экраном, кнопками выбора типа оружия, лазерный дальномер, баллистический вычислитель, датчики условий стрельбы, приводы наведения оружия, отличающаяся тем, что в ней с целью повышения эффективности управления вооружением РТК ВН за счет сокращения времени на его подготовку к последовательному поражению нескольких целей, обнаруженных внешними средствами разведки, включены блок селекции целей и оружия с информационной панелью и блок выработки сигналов управления оружием, причем на первый вход блока селекции целей и оружия поступает информация об обнаруженных целях с внешних средств разведки, на второй вход блока селекции целей и оружия поступает информация с приемника системы спутниковой навигации, на третий вход подается команда выбора цели от оператора, а выход связан с входом блока выработки сигналов управления оружием, выходы которого соединены с баллистическим вычислителем и приводами наведения оружия.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2429439C2 |
| 0 |
|
SU162717A1 | |
| DE 102020004147 A1, 04.11.2021 | |||
| CN 103336885 B, 13.01.2016 | |||
| DE 102015120205 A1, 23.03.2017. | |||

