Изобретение относится к робототехнике и может быть использовано при создании приводов манипуляторов.
Известно устройство для управления приводом робота, содержащее последовательно соединенные первый блок умножения, первый сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, а выходом через третий сумматор - к первому входу первого блока умножения, последовательно соединенные источник постоянного сигнала, четвертый сумматор, второй блок умножения и пятый сумматор, последовательно соединенные датчик массы и шестой сумматор, выход которого подключен ко второму входу первого блока умножения, причем выход датчика скорости подключен ко входу релейного элемента и вторым входам третьего и пятого сумматоров, третий вход пятого сумматора подключен к выходу релейного элемента, а его выход - ко второму входу первого сумматора, последовательно соединенные синусный функциональный преобразователь, третий блок умножения, второй вход которого подключен к выходу первого датчика ускорения, и седьмой сумматор, выход которого подключен ко второму входу второго блока умножения, последовательно соединенные косинусный функциональный преобразователь, вход которого соединен со входом синусного функционального преобразователя и выходом датчика положения, и четвертый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, а выход - ко второму входу седьмого сумматора, причем вторые входы четвертого и шестого сумматоров подключены, соответственно, к выходам датчика массы и источника постоянного сигнала (см. патент РФ №2212329, БИ №26, 2003 г.).
Недостатком этого устройства является то, что оно предназначено только для точного управления углом поворота выходного вала привода по заданному закону и не может одновременно обеспечивать точного управления моментом, с которым этот привод воздействует на объект работ в процессе его вращения.
Известно также устройство для управления приводом робота, содержащее последовательно соединенные первый блок умножения, первый сумматор, усилитель и двигатель, связанный с первым датчиком скорости непосредственно и через редуктор с первым датчиком положения, выход которого соединен с первым входом второго сумматора, подключенного вторым входом к входу устройства, а выходом через третий сумматор - к первому входу первого блока умножения, последовательно соединенные источник постоянного сигнала, четвертый сумматор, второй блок умножения и пятый сумматор, последовательно соединенные датчик массы и шестой сумматор, выход которого подключен ко второму входу первого блока умножения, причем выход датчика скорости подключен ко входу релейного элемента и вторым входам третьего и пятого сумматоров, третий вход пятого сумматора подключен к выходу релейного элемента, а его выход - ко второму входу первого сумматора, последовательно соединенные синусный функциональный преобразователь, третий блок умножения, второй вход которого подключен к выходу первого датчика ускорения, и седьмой сумматор, последовательно соединенные косинусный функциональный преобразователь, вход которого соединен со входом синусного функционального преобразователя и выходом датчика положения, и четвертый блок умножения, второй вход которого подключен к выходу второго датчика ускорения, а выход - ко второму входу седьмого сумматора, причем вторые входы четвертого и шестого сумматоров подключены, соответственно, к выходам датчика массы и источника постоянного сигнала, третий датчик ускорения, механически соединенный входом с выходным валом двигателя, а выходом - с четвертым входом пятого сумматора, последовательно соединенные первый дифференциатор, восьмой сумматор, второй вход которого соединен с выходом пятого блока умножения, и шестой блок умножения, второй вход которого соединен с выходом косинусного функционального преобразователя, последовательно соединенные седьмой блок умножения, первый вход которого подключен к выходу второго датчика ускорения и входу первого дифференциатора, а его второй вход - к выходу первого датчика скорости и первому входу пятого блока умножения, девятый сумматор, второй вход которого через второй дифференциатор соединен с выходом первого датчика ускорения и вторым входом пятого блока умножения, восьмой блок умножения, второй вход которого соединен с выходом синусного функционального преобразователя, и десятый сумматор, второй вход которого соединен с выходом седьмого сумматора, третий - с выходом шестого блока умножения, а выход - со вторым входом второго блока умножения (см. патент РФ №2258600, БИ №23, 2005 г.).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению. Однако его недостатком также является то, что оно предназначено только для точного управления углом поворота выходного вала привода по заданному закону и не может одновременно обеспечивать точного управления моментом, с которым этот привод воздействует на объект работ в процессе его вращения.
Задачей, на решение которой направлено заявляемое техническое устройство, является обеспечение точного управления не только положением выходного вала привода по заданному закону, но и моментом, с которым этот привод воздействует на объект работ в процессе его движения.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход привода, который обеспечивает получение дополнительных воздействий на привод, обеспечивающих правильное распределение общего момента, развиваемого электроприводом в целом, на две части, одна из которых расходуется на его вращение по заданному закону, а вторая - на создание требуемого моментного воздействия на объект работ.
Поставленная задача решается тем, что в электропривод манипулятора, содержащий последовательно соединенные сумматор, усилитель и электродвигатель, вал которого связан с датчиками скорости и ускорения непосредственно и через редуктор с датчиком положения, выход которого соединен с первым отрицательным входом сумматора, подключенного вторым отрицательным входом к выходу датчика скорости, третьим положительным входом - к выходу датчика ускорения, а четвертым положительным входом - к первому выходу программного устройства, дополнительно введен датчик тока, установленный в электрическую цепь ротора электродвигателя, выход этого датчика тока соединен с пятым отрицательным входом сумматора, шестой, седьмой и восьмой положительные входы которого подключены соответственно к второму, третьему и четвертому выходам программного устройства, а его девятый отрицательный вход - к пятому выходу этого программного устройства.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналогов и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают высокую точность управления как движением электропривода, так и моментом, с которым он воздействует на объект работ.
На чертеже представлена функциональная схема устройства и введены следующие обозначения:
αp - угол поворота выходного вала редуктора;
αж - сигнал желаемого значения координаты αр;
 ,
,  - угловая скорость и ускорение ротора электродвигателя соответственно;
- угловая скорость и ускорение ротора электродвигателя соответственно;
i - ток в обмотке ротора;
 ,
,  - желаемые значения координат
- желаемые значения координат  ,
,  соответственно;
соответственно;
Мж,  - желаемый момент воздействия на объект работ и его производная соответственно;
- желаемый момент воздействия на объект работ и его производная соответственно;
U - сигнал управления электродвигателем 3.
Электропривод манипулятора содержит последовательно соединенные сумматор 1, усилитель 2 и электродвигатель 3, вал которого связан с датчиками скорости 4 и ускорения 5 непосредственно и через редуктор 6 с датчиком 7 положения, выход которого соединен с первым отрицательным входом сумматора 1, подключенного вторым отрицательным входом к выходу датчика скорости 4, третьим положительным входом - к выходу датчика 5 ускорения, четвертым положительным входом - к первому выходу программного устройства 8, пятым отрицательным входом - к выходу датчика 9 тока, установленного в электрическую цепь ротора электродвигателя 3, шестым, седьмым и восьмым положительными входами - соответственно, к второму, третьему и четвертому выходам программного устройства 8, а девятым отрицательным входом - к пятому выходу этого программного устройства.
Электропривод работает следующим образом.
Программное устройство 8 формирует и подает, соответственно, на четвертый, шестой и седьмой входы сумматора 1 желаемые входные воздействия αж, , по всем фазовым координатам αр, , электропривода, а также желаемые входные воздействия Мж, (на восьмой и девятый входы сумматора 1, соответственно), которые в сочетании с обратными связями по всем фазовым координатам αр, , и i позволяют сформировать итоговое управление электроприводом U, которое имеет вид

Все положительные коэффициенты усиления  в управлении (1) рассчитываются таким образом, чтобы выходной вал редуктора 6 (привода) точно отслеживал желаемый закон изменения его положения, который задается входным сигналом αж, и при этом обеспечивалось бы точное (программное) моментное воздействие на объект работ, которое задается входным сигналом Мж. Вводимые в закон управления (1) дополнительные входные сигналы , и , а также сигналы обратных связей по фазовым координатам αр, , , i обеспечивают высокую динамическую точность одновременной отработки электроприводом желаемых входных воздействий Мж и αж.
в управлении (1) рассчитываются таким образом, чтобы выходной вал редуктора 6 (привода) точно отслеживал желаемый закон изменения его положения, который задается входным сигналом αж, и при этом обеспечивалось бы точное (программное) моментное воздействие на объект работ, которое задается входным сигналом Мж. Вводимые в закон управления (1) дополнительные входные сигналы , и , а также сигналы обратных связей по фазовым координатам αр, , , i обеспечивают высокую динамическую точность одновременной отработки электроприводом желаемых входных воздействий Мж и αж.
Использование таких электроприводов в составе многозвенного манипулятора позволяет не только точно перемещать любой рабочий инструмент по произвольным пространственным траекториям, но и создавать этим рабочим инструментом требуемое силовое воздействие (по величине и направлению) на объект работ. В результате с помощью программного манипулятора удается реализовывать любые технологические операции, связанные с выполнением точных механических работ без использования специальных силовых обратных связей, формируемых с помощью сложных и малоточных устройств сило-моментного ощущения, располагаемых вблизи охвата манипулятора, которые значительно снижают жесткость манипулятора и тем самым ухудшают его точностные и эксплуатационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443542C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2453892C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443543C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2565779C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2454696C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372186C1 |
| Самонастраивающийся электропривод манипулятора | 2015 |
|
RU2606372C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705739C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2008 |
|
RU2372185C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2011 |
|
RU2461036C1 |
Изобретение относится к робототехнике и может быть использовано при создании приводов манипуляторов. Электропривод манипулятора содержит последовательно соединенные сумматор, усилитель и электродвигатель. Вал электродвигателя связан с датчиками скорости и ускорения и через редуктор с датчиком положения. В электрическую цепь ротора электродвигателя установлен датчик тока, соединенный с пятым отрицательным входом сумматора. Технический результат заключается в обеспечении точного управления перемещением манипулятора по произвольным пространственным траекториям. 1 ил.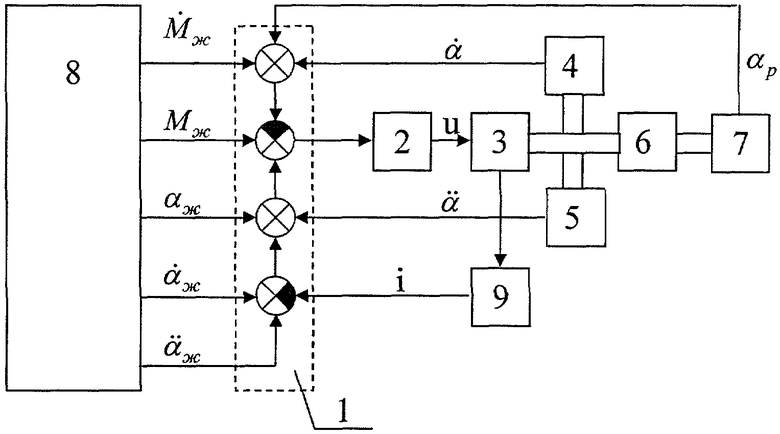
Электропривод манипулятора, содержащий последовательно соединенные сумматор, усилитель и электродвигатель, вал которого непосредственно связан с датчиками скорости и ускорения и через редуктор с датчиком положения, выход которого соединен с первым отрицательным входом сумматора, подключенного вторым отрицательным входом к выходу датчика скорости, третьим положительным входом - к выходу датчика ускорения, а четвертым положительным входом - к первому выходу программного устройства, отличающийся тем, что он снабжен датчиком тока, установленным в электрическую цепь ротора электродвигателя и соединенным с пятым отрицательным входом сумматора, шестой, седьмой и восьмой положительные входы которого подключены соответственно к второму, третьему и четвертому выходам программного устройства, а его девятый отрицательный вход - к пятому выходу этого программного устройства.
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258600C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212330C1 |
| Щитовой добычной агрегат для очистной выемки угля при разработке пологопадающих пластов короткими забоями | 1957 |
|
SU120198A1 |

