Настоящее изобретение относится к соединительным устройствам, в частности к соединительным устройствам, используемым для крепления радиолокаторов, антенн или оптических датчиков преимущественно судовых навигационных систем.
Такие соединительные устройства предназначены прежде всего для регулирования положения одного объекта относительно другого. В существующих в настоящее время соединительных устройствах используются регулирующие устройства прямолинейного типа, не связанные друг с другом. Соединительные устройства такого типа с прямолинейными регулирующими устройствами не позволяют одновременно менять расстояние между объектами, поворачивать их друг относительно друга и изменять их угол наклона.
Известные в настоящее время соединительные устройства и, в частности, устройство, предложенное в патенте US 3871778 от 18 марта 1975 г., предназначены для соединения объектов, которые могут поступательно перемещаться, но не могут поворачиваться друг относительно друга. В описанном в этом патенте соединительном механизме объекты соединяются между собой упругими связями и по меньшей мере тремя соединительными устройствами. Каждое такое соединительное устройство состоит из двух систем. Каждая система представляет собой замкнутую систему связей, состоящую из четырех соединенных шарнирами звеньев. При этом обе системы имеют одно общее звено. Принципиальной особенностью предложенного в этом патенте соединительного механизма является его слишком большое защемление и наличие избыточных связей и, как следствие этого, большие внутренние напряжения, которые могут привести к поломке механизма. Для повышения надежности механизма имеющееся в нем общее для двух соединительных систем звено целенаправленно выполняют в виде торсиона с низкой крутильной жесткостью.
Кроме того, известные в настоящее время соединительные устройства обычно содержат сравнительно большое количество соединительных звеньев и простых шарниров с одной степенью свободы. Простые шарниры с одной степенью свободы по существу исключают возможность применения подобных соединительных устройств для крепления антенн, радиолокаторов и оптических датчиков в условиях мелководья.
В основу настоящего изобретения была положена задача устранить недостатки, присущие известным соединительным устройствам, и разработать соединительное устройство, соединяемые которым объекты могли бы совершать поступательные перемещения, но не могли бы поворачиваться друг относительно друга вокруг любой оси. Предлагаемое в изобретении соединительное устройство состоит из сравнительно небольшого количества деталей и обладает за счет сравнительно небольшого количества шарниров достаточной жесткостью.
Предлагаемое в изобретении простое соединительное устройство состоит из устройства жесткости, предназначенного для придания ему необходимой крутильной жесткости, двух соединительных звеньев, соединяющих устройство жесткости со вторым соединяемым объектом, двух первых шарнирных соединительных устройств, соединяющих непосредственно или опосредованно соединительные звенья с двумя отдельными точками второго соединяемого объекта, двух вторых шарнирных соединительных устройств, соединяющих в двух разных точках устройство жесткости с каждым соединительным звеном, и двух третьих шарнирных соединительных устройств, соединяющих непосредственно устройство жесткости с двумя отдельными точками первого соединяемого объекта.
В частных вариантах осуществления устройство жесткости выполнено в виде коробки или полого коробчатого кожуха.
Все шарнирные соединительные устройства допускают вращение соединяемых ими деталей вокруг любой оси.
По меньшей мере одно из двух третьих шарнирных соединительных устройств допускает вращение соединяемых им деталей вокруг одной оси, которая проходит через центры обоих третьих шарнирных соединительных устройств.
По меньшей мере одно из двух третьих шарнирных соединительных устройств допускает поступательное перемещение соединяемых им деталей - устройства жесткости с первым соединяемым устройством.
Из предлагаемых в настоящем изобретении простых соединительных устройств может быть выполнено сложное (составное) соединительное устройство, в частности, состоящее из трех простых соединительных устройств.
В другом варианте может быть составлено сложное соединительное устройство из трех простых соединительных устройств со взаимно перпендикулярными осями, которые расположены перпендикулярно плоскостям, образованным двумя шарнирными соединительными устройствами каждого простого соединительного устройства.
Такое сложное соединительное устройство может применяться вместе с опорами, которые специально приспособлены для крепления радиолокаторов, антенн и оптических датчиков различных судовых навигационных систем.
Перечисленные выше, а также другие отличительные особенности и преимущества изобретения более подробно рассмотрены ниже на примере некоторых возможных вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показаны основные и наиболее существенные детали предлагаемых в изобретении устройств, и отражены в формуле изобретения. Отдельные детали предлагаемых в изобретении устройств могут использоваться в различных вариантах его осуществления и по отдельности, и совместно в любом их сочетании между собой. На прилагаемых к описанию чертежах, в частности, показано:
на фиг.1 - один из примеров возможного выполнения предлагаемого в изобретении простого соединительного устройства,
на фиг.2а и 2б - схемы, на которых в виде сверху, а на фиг.2в, 2г, 2д, 2е, 2ж, 2з, 2и и 2к в виде сбоку показаны два, соответственно восемь альтернативных вариантов возможного объединения простого соединительного устройства с рычажными соединительными устройствами,
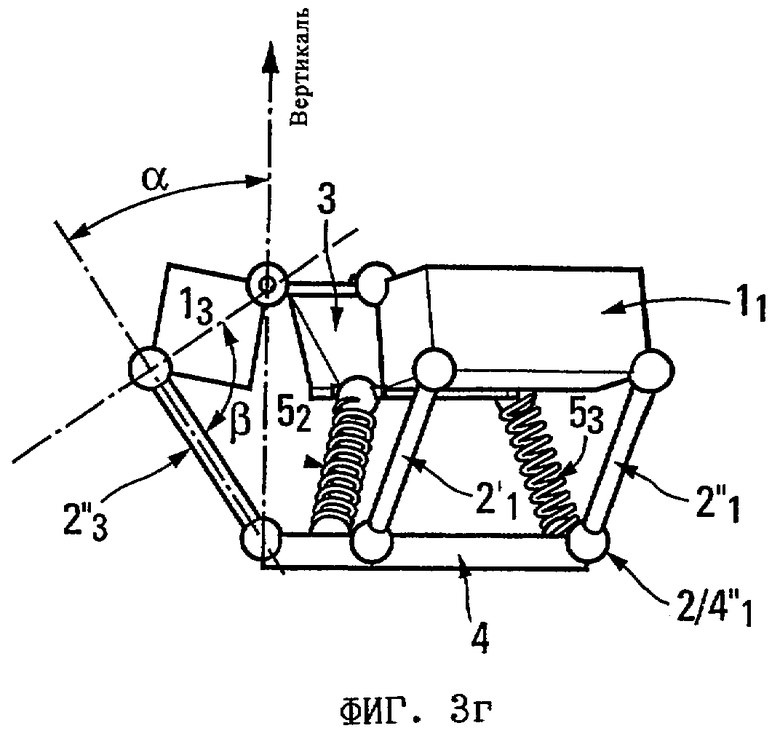
на фиг.3а, 3б, 3в и 3г - соответственно в аксонометрии, спереди, сверху и сбоку первый вариант возможного выполнения предлагаемого в изобретении сложного соединительного устройства,
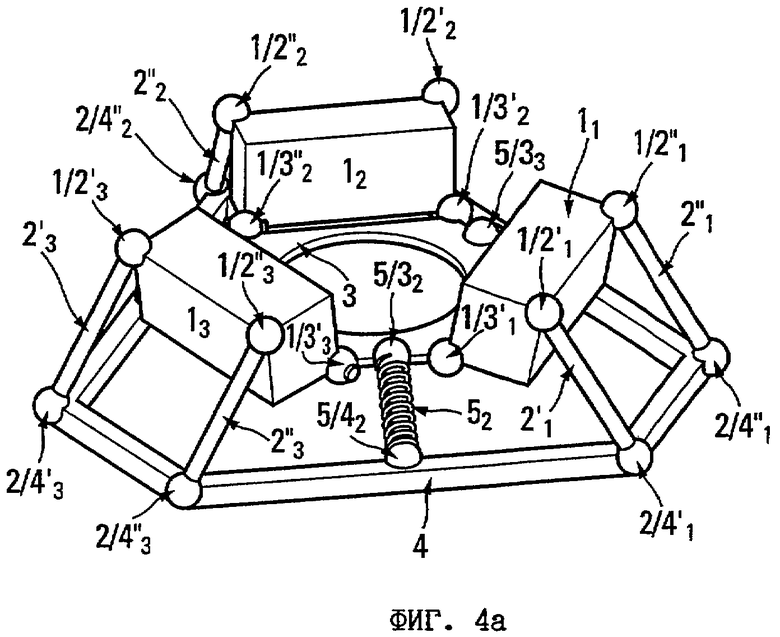
на фиг.4а, 4б, 4в и 4г - соответственно в аксонометрии, спереди, сверху и сбоку второй вариант возможного выполнения предлагаемого в изобретении сложного соединительного устройства,
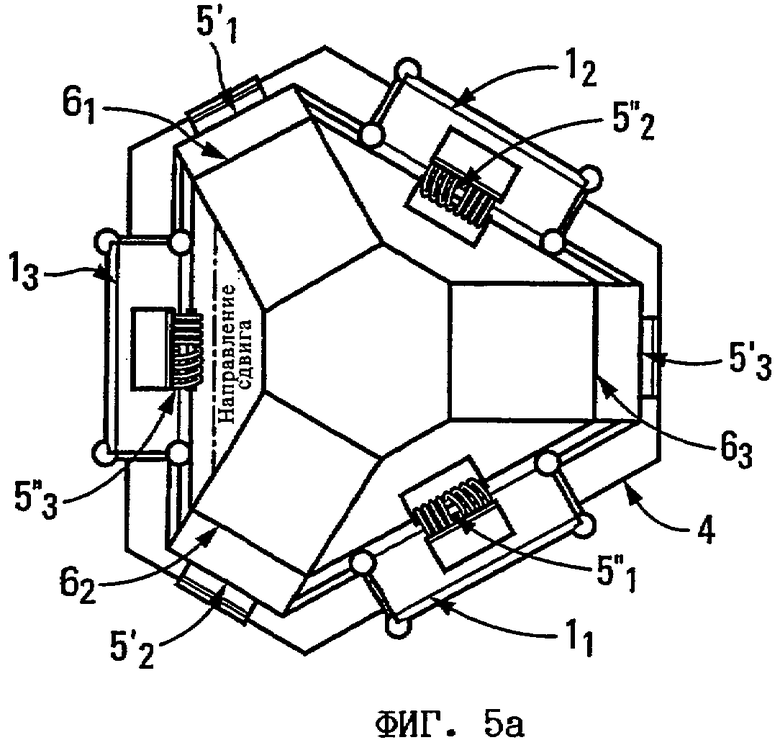
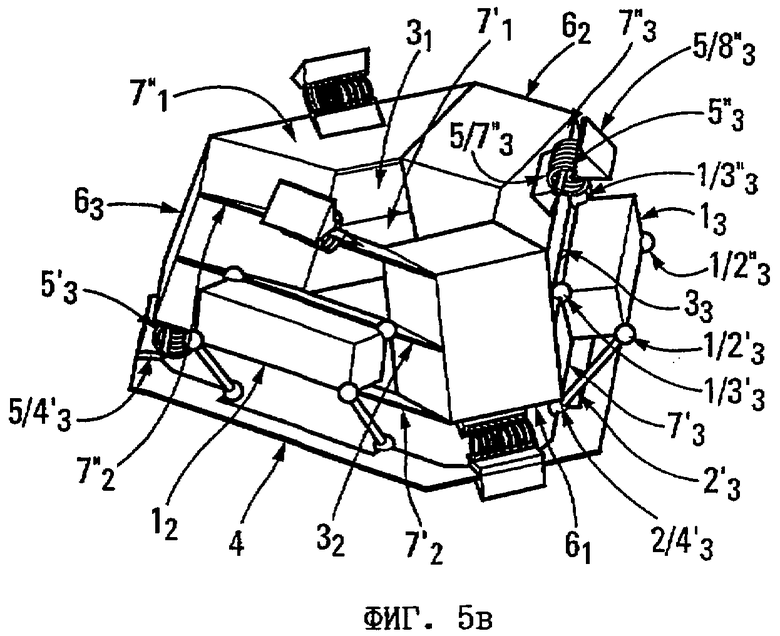
на фиг.5а, 5б, 5в и 5г - соответственно сверху, сбоку, в аксонометрии и спереди третий вариант возможного выполнения предлагаемого в изобретении сложного соединительного устройства,
на фиг.6а и 6б - соответственно в разрезе и в аксонометрии выполненное по третьему варианту сложное соединительное устройство с внешним кожухом.
На фиг.1 показан один из примеров возможного выполнения предлагаемого в изобретении простого соединительного устройства. Такое предлагаемое в изобретении простое соединительное устройство состоит из устройства 1 жесткости, предназначенного для придания простому соединительному устройству необходимой крутильной жесткости (в дальнейшем называемого просто устройством жесткости), и двух соединительных звеньев 2' и 2'', соединяющих устройство 1 жесткости с первым соединяемым объектом 30.
Соединительное устройство имеет также два первых шарнирных соединительных устройства 2/4' и 2/4'', расположенных в двух различных точках: соответственно между каждым соединительным звеном 2' и 2'' и двумя разными точками второго соединяемого объекта 4о при его непосредственном соединении с соединительными звеньями. При опосредованном соединении соединительных звеньев 2' и 2'' со вторым соединяемым объектом 40 два первых шарнирных соединительных устройства 2/4' и 2/4'' можно расположить в двух других разных точках: соответственно между каждым соединительным звеном 2' и 2'' и двумя разными точками второго соединительного устройства 4, например основания, которое жестко крепится ко второму соединяемому объекту 40. В этом варианте соединительные звенья 2' и 2'' шарнирно соединяются с основанием 4. Очевидно, что основание 4 должно быть прочно соединено со вторым соединяемым объектом 40.
Имеющиеся в устройстве два вторых шарнирных соединительных устройства 1/2' и 1/2'' расположены в двух разных точках между устройством 1 жесткости и каждым соединительным звеном 2' и 2''.
Имеющиеся в устройстве два третьих шарнирных соединительных устройства 1/3' и 1/3'' также расположены в двух разных точках: соответственно между двумя разными точками устройства 1 жесткости и двумя точками первого соединяемого объекта 30 при его непосредственном соединении с устройством жесткости. При опосредованном соединении устройства 1 жесткости с первым соединяемым объектом 30 два третьих шарнирных соединительных устройства 1/3' и 1/3'' можно расположить в двух других разных точках: соответственно между двумя разными точками устройства 1 жесткости и двумя разными точками первого соединительного устройства 3, например опоры, к которой жестко крепится первый соединяемый объект 30.
В качестве устройства 1 жесткости можно использовать, например, показанную на фиг.1 коробку. Устройство 1 жесткости можно, например, выполнить в виде полого коробчатого кожуха с расположенными в нем различными объектами. Кроме того, соединительные звенья 2 можно выполнить в виде тяг или стержней.
Первое, второе и третье шарнирные соединительные устройства 1/2', 1/2'', 1/3', 1/3'', 2/4', 2/4'' можно выполнить в виде простых одноосных шарниров. Кроме того, первое, второе и третье шарнирные соединительные устройства 1/2', 1/2'', 1/3', 1/3'', 2/4', 2/4'' можно выполнить в виде универсальных шарниров, карданных соединений или показанных на фиг.1 шаровых шарнирных соединений. Кроме того, по меньшей мере одно из двух третьих шарнирных соединительных устройств 1/3' или 1/3'' может допускать возможность прямолинейного относительного перемещения соединяемых звеньев в направлении оси, проходящей через центры шарнирных соединительных устройств 1/3' и 1/3''. В этом случае в качестве одного из третьих шарнирных соединительных устройств используют универсальный шарнир с прямолинейным направляющим устройством, образованным, например, осевым зазором.
В другом варианте оба третьих шарнирных соединительных устройства 1/3' и 1/3'' могут быть выполнены в виде простых одноосных шарниров, допускающих вращение вокруг оси, проходящей через центр третьих шарнирных соединительных устройств 1/3' и 1/3''. Кроме того, по меньшей мере одно из двух третьих шарнирных соединительных устройств также может допускать возможность относительного поступательного перемещения в направлении оси, проходящей через центры третьих шарнирных соединительных устройств 1/3' и 1/3''.
Выполненное таким образом простое соединительное устройство исключает возможность вращения соединяемых им объектов вокруг оси, перпендикулярной плоскости 1/2'-1/2''-2/4'-2/4'', при этом в нем не возникают недопустимые внутренние напряжения, которые могут привести к выходу устройства из строя, например к его поломке. Кроме того, предлагаемые в изобретении простые соединительные устройства, одно из которых в качестве примера показано на фиг.1, имеют намного меньше соединительных звеньев и шарниров, чем известные в настоящее время простые соединительные устройства аналогичного типа. Помимо этого предлагаемые в изобретении простые соединительные устройства могут работать и при отсутствии в них простых шарниров.
Предлагаемое в изобретении простое соединительное устройство обладает большой поворотной жесткостью вокруг оси, перпендикулярной плоскости, образованной осями звеньев 2' и 2'', или, в другом варианте, перпендикулярной плоскости, образованной каждыми тремя из четырех центров шарнирных соединительных устройств 1/2', 1/2'', 2/4' и 2/4''.
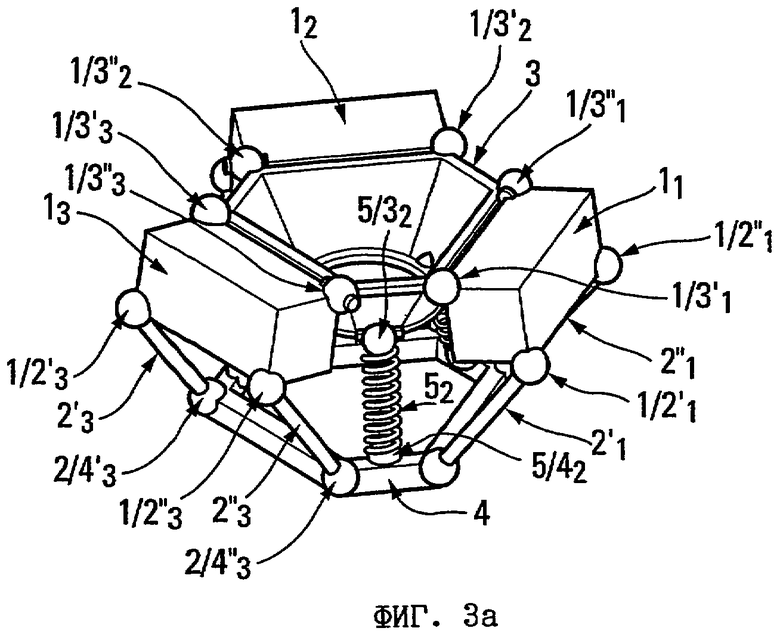
На фиг.3а, 3б, 3в и 3г и 4а, 4б, 4в и 4г показаны первый и второй варианты выполнения сложного (составного) соединительного устройства. Оба эти сложные соединительные устройства состоят из трех простых соединительных устройств, одно из которых показано на фиг.1. В более предпочтительном варианте простые соединительные устройства, чтобы соединяемые сложным соединительным устройством объекты не могли поворачиваться вокруг одной из осей, должны быть расположены друг относительно друга таким образом, чтобы их оси, относительно которых они обладают высокой поворотной жесткостью (оси жесткости), не лежали в одной плоскости.
В наиболее предпочтительном варианте у находящегося в состоянии покоя сложного соединительного устройства упомянутые оси жесткости трех простых соединительных устройств должны быть расположены перпендикулярно друг другу. Под состоянием покоя подразумевается такое состояние соединительного устройства, в котором оно находится при нулевых относительных перемещениях соединяемых им объектов 30 и 40. Сложное соединительное устройство, состоящее из трех простых соединительных устройств со взаимно перпендикулярными осями жесткости, имеет одну и ту же поворотную жесткость вокруг любой произвольно выбранной оси. Каждая из осей жесткости простых соединительных устройств направлена, как уже было отмечено выше, перпендикулярно плоскости, образованной двумя соединительными звеньями 2' и 2'' соответствующих простых соединительных устройств.
Опора 3 и/или опора 4 могут быть общими для всех трех простых соединительных устройств, из которых состоит сложное соединительное устройство.
В рассматриваемом варианте опора 4 сложного соединительного устройства представляет собой его основание. Основание 4 сложного соединительного устройства можно выполнить, например, в виде показанного на фиг.3а, 3б, 3в и 3г и 4а, 4б, 4в и 4г кольца шестиугольной формы. Такое основание можно установить, например, на корпусе судна.
Каждый угол шестиугольного основания 4 кольца соединен одним из соединительных звеньев 2'1-2''1, 2'2-2''2 и 2'3-2''3 (на концах которых расположены соответствующие шарнирные соединительные устройства 1/2'1-1/2''1 2/4'1-2/4''1, 1/2'2-1/2''2, 2/4'2-2/4''2 или 1/2'3-1/2''3, 2/4'3-2/4''3) с соответствующим устройством 11, 12 и 13 жесткости.
Кроме того, каждое устройство 11, 12 и 13 жесткости можно соединить соответствующими двумя третьими шарнирными соединительными устройствами 1/3'1-1/3''1, 1/3'2-1/3''2 и 1/3'3-1/3''3 с верхним шестиугольным кольцом, образующим общую для всех простых соединительных устройств опору 3. Одно из двух третьих шарнирных соединительных устройств 1/3'1, 1/3'2 и 1/3'3 можно выполнить в виде универсального шарнира. Другое третье шарнирное соединительное устройство 1/3'1, 1/3'2 и 1/3'3 можно выполнить в виде универсального шарнира с дополнительной возможностью линейного перемещения в направлении оси поворота между соответствующими устройствами 11, 12 и 13 жесткости и опорой 3.
Предлагаемое сложное соединительное устройство может также иметь по меньшей мере два виброизолирующих устройства 51, 52 и 53 для демпфирования и амортизации вибраций и ударов. Один конец каждого такого устройства 51, 52 и 53 для демпфирования и амортизации вибраций и ударов через шарнирное соединительное устройство 5/31, 5/32 и 5/33 крепится к опоре 3 первого объекта, а его другой конец через соединительное шарнирное устройство 5/41, 5/42 и 5/43 крепится к опоре 4 соединительного устройства. Шарнирные соединительные устройства 5/31, 5/32 и 5/33, 5/41, 5/42 и 5/43 можно выполнить в виде универсальных шарниров или карданных соединений или в виде показанных на фиг.3а, 3б, 3в, 3г, 4а, 4б, 4в и 4г шаровых шарнирных соединений.
Предлагаемое в изобретении сложное соединительное устройство может иметь, например, по одному устройству 51, 52 и 53 для демпфирования и амортизации вибраций и ударов, расположенному, как показано на фиг.3а, 3б, 3в и 3г и 4а, 4б, 4в и 4г, между каждой парой простых соединительных устройств.
Устройства 51, 52 и 53 для демпфирования и амортизации вибраций и ударов ограничивают линейные перемещения объектов, соединяемых между собой предлагаемым в изобретении сложным соединительным устройством. При наличии трех таких устройств 51, 52 и 53 для демпфирования и амортизации вибраций и ударов предлагаемое в изобретении сложное соединительное устройство имеет собственные частоты в пределах приблизительно от 2 до 10 Гц. Выполненное таким образом соединительное устройство гасит удары, возникающие, например, при подводных взрывах с основной частотой (>10 Гц), превышающей собственные частоты соединительного устройства. Такое соединительное устройство, кроме того, позволяет ограничить, в частности ходом пружины, максимальное относительное перемещение соединяемых объектов при частотах (<2 Гц), меньших собственных частот соединительного устройства и связанных, в частности, с обычным движением судна и бортовой качкой. Таким образом, предлагаемое в изобретении сложное соединительное устройство надежно защищает и изолирует опору 3 и закрепленный на ней сверху объект 30 от воздействия внешних ударов и вибраций.
В предпочтительном варианте усилия, создаваемые устройствами 51 52 и 53 для демпфирования и амортизации вибраций и ударов, у предлагаемого в изобретении сложного соединительного устройства в состоянии покоя должны проходить приблизительно через центр тяжести системы, состоящей из устройств 11, 12 и 13 жесткости, опоры 3 и закрепленного на ней объекта 30.
Возникающие в этом случае опрокидывающие моменты, обусловленные линейными ускорениями и связанные, например, с движением судна, сводятся к минимуму, а угловая точность ориентации объекта увеличивается.
Соотношение между собственными частотами горизонтальных и вертикальных линейных колебаний можно изменить путем изменения номинального угла между центральной осью каждого устройства 51, 52 и 53 для демпфирования и амортизации вибраций и ударов и вертикалью.
В качестве устройств 51, 52 и 53 для демпфирования и амортизации вибраций и ударов в предлагаемом в изобретении сложном соединительном устройстве можно использовать изображенные на фиг.3а, 3б, 3в и 3г и 4а, 4б, 4в и 4г в виде пружин пружинные демпферы. Устройства 51, 52 и 53 для демпфирования и амортизации вибраций и ударов можно также выполнить в виде пакетов тарельчатых пружин, виброизолирующих опор канатного типа или тросов и/или в виде пружин любого другого типа и/или в виде устройств с дополнительными демпферами.
Описанное сложное соединительное устройство имеет статически определимую конструкцию, поскольку оно состоит из определенной комбинации следующих элементов:
- устройств 11, 12 и 13 жесткости,
- соединяемых между собой объектов 30 и 40,
- соединительных звеньев 2'1-2''1, 2'2-2''2 и 2'3-2''3 и
- шарнирных соединительных устройств 1/2'1-1/2''1, 1/3'1-1/3''1, 2/4'1-2/4''1, 1/2'2-1/2''2, 1/3'2-1/3''2, 2/4'2-2/4''2 и 1/2'3-1/2''3, 1/3'3-1/3''3, 2/4'3-2/4''3 с определенными степенями свободы.
Фактическая геометрия собираемых друг с другом элементов предлагаемого в изобретении сложного соединительного устройства может отличаться от идеальной. Так, например, длина одного или нескольких соединительных звеньев 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 может отличаться от длины других звеньев на величину, при которой в соединительном устройстве не возникают заметные внутренние усилия и напряжения. Однако только при идеальной геометрии предлагаемое в изобретении сложное соединительное устройство может обеспечить строго прямолинейное относительное перемещение соединяемых им объектов без всякого их взаимного поворота друг относительно друга.
Для придания сложному соединительному устройству идеальной геометрии каждое из его простых соединительных устройств должно удовлетворять следующим требованиям:
- оси соединительных звеньев 2' и 2'' должны быть параллельны друг другу и
- прямые, проходящие через центры первых шарнирных соединительных устройств 2/4' и 2/4'', через центры вторых шарнирных соединительных устройств 1/2' и 1/2'' и через центры третьих шарнирных соединительных устройств 1/3' и 1/3'', должны быть параллельны друг другу.
Для выполнения этих двух требований необходимо, в частности, чтобы оба соединительных звена 2' и 2'' каждого простого соединительного устройства имели одну и ту же длину. При этом длина соединительных звеньев в каждом из трех простых соединительных устройств может быть разной. Аналогичным образом при соблюдении указанных выше требований у всех трех простых соединительных устройств разными могут быть и другие линейные и угловые размеры.
Как уже было отмечено выше, в наиболее предпочтительном варианте у предлагаемого сложного соединительного устройства оси жесткости трех простых соединительных устройств должны быть расположены перпендикулярно друг другу. Для этого необходимо, чтобы помимо полной симметрии относительно вертикали все три простых соединительных устройства имели равные размеры, а у находящегося в состоянии покоя сложного соединительного устройства углы α1, α2 и α3 между вертикалью и соединительными звеньями 2'1, 2''1, 2'2, 2''2 и 2'3, 2''3 соответственно были равны арккосинусу квадратного корня из 2/3 или приблизительно 35°.
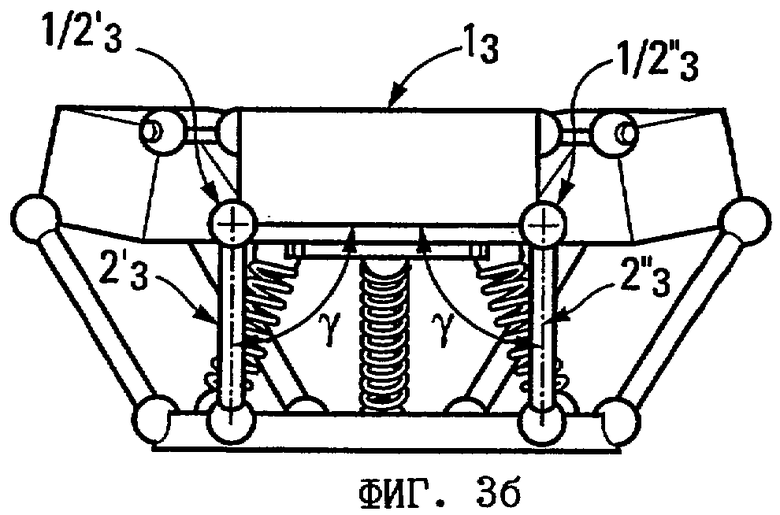
В оптимально спроектированном сложном соединительном устройстве необходимо также соответствующим образом выбрать и угол β между осью соединительного звена 2' и прямой, проходящей через центры шарнирных соединительных устройств 1/2' и 1/3'', который при соблюдении указанных выше требований в каждом простом соединительном устройстве у находящегося в состоянии покоя сложного соединительного устройства равен произвольно выбранному углу между осью соединительного звена 2'' и прямой, проходящей через центры шарнирных соединительных устройств 1/2'' и 1/3'', и составляет 90°.
Помимо этого по соображениям симметрии угол γ между осью соединительного звена 2' и прямой, проходящей через центры шарнирных соединительных устройств 1/2' и 1/2'', а также угол γ между осью соединительного звена 2'' и прямой, проходящей через центры шарнирных соединительных устройств 1/2' и 1/2'', в каждом простом соединительном устройстве у находящегося в состоянии покоя сложного соединительного устройства также выбирают равным 90°.
Таким образом, при такой геометрии у находящегося в состоянии покоя сложного соединительного устройства с равными нулю всеми поступательными перемещениями опоры 3 первого объекта относительно основания 4, которым оно крепится ко второму объекту, углы α между каждым соединительным звеном 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 и вертикалью равны приблизительно 35°, углы β между каждым соединительным звеном 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 и прямой, проходящей через центры соответствующих вторых шарнирных соединений 1/2'1, 1/2''1, 1/2'2, 1/2''2, 1/2'3, 1/2''3 и соответствующих третьих шарнирных соединений 1/3'1, 1/3''1, 1/3'2, 1/3''2, 1/3'3, 1/3''3, равны 90°, оси пружин проходят через центр тяжести системы, состоящей из устройств 11, 12 и 13 жесткости, опоры 3 и первого объекта 30, а углы между пружинами и вертикалью зависят от распределения масс и собственных частот соединительного устройства.
Использование в сложном соединительном устройстве в качестве устройств 11, 12 и 13 жесткости полых коробчатых кожухов позволяет расположить в них различные объекты, например электронные блоки, и защитить их с помощью соответствующих средств виброизоляции от воздействия внешних вибраций и ударов.
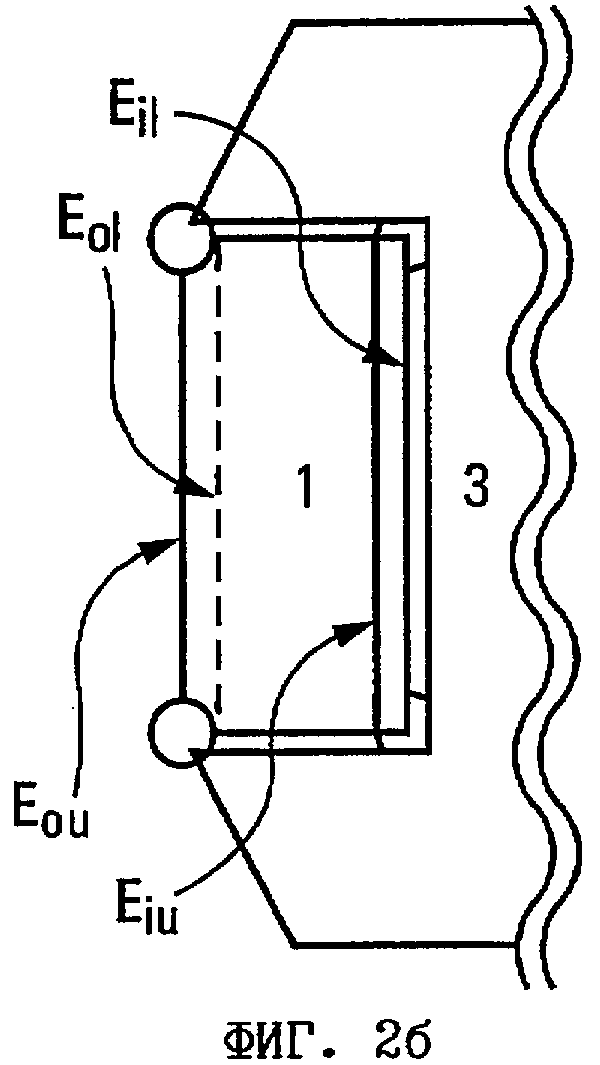
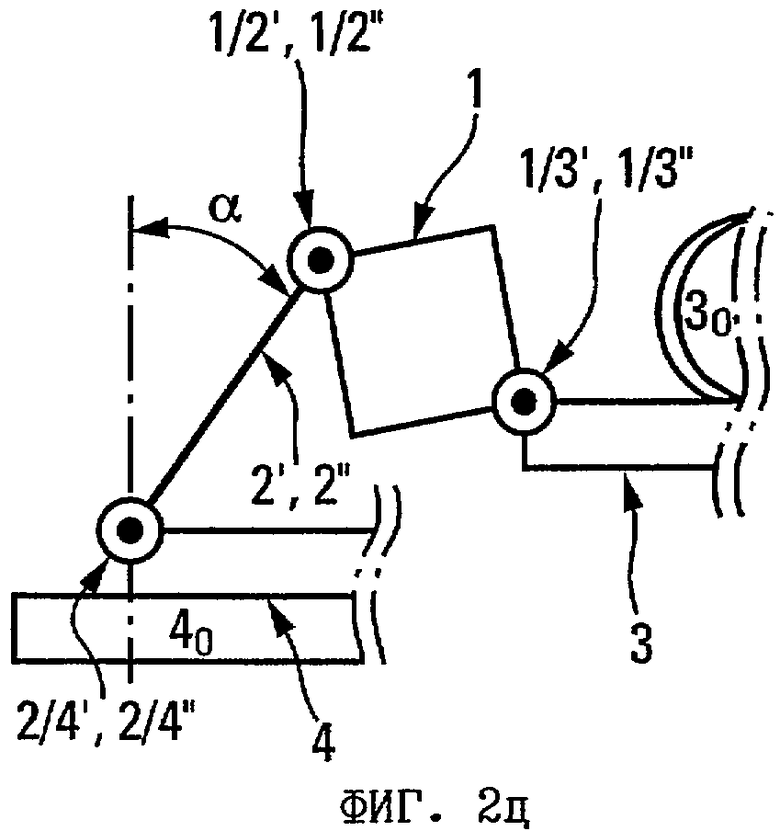
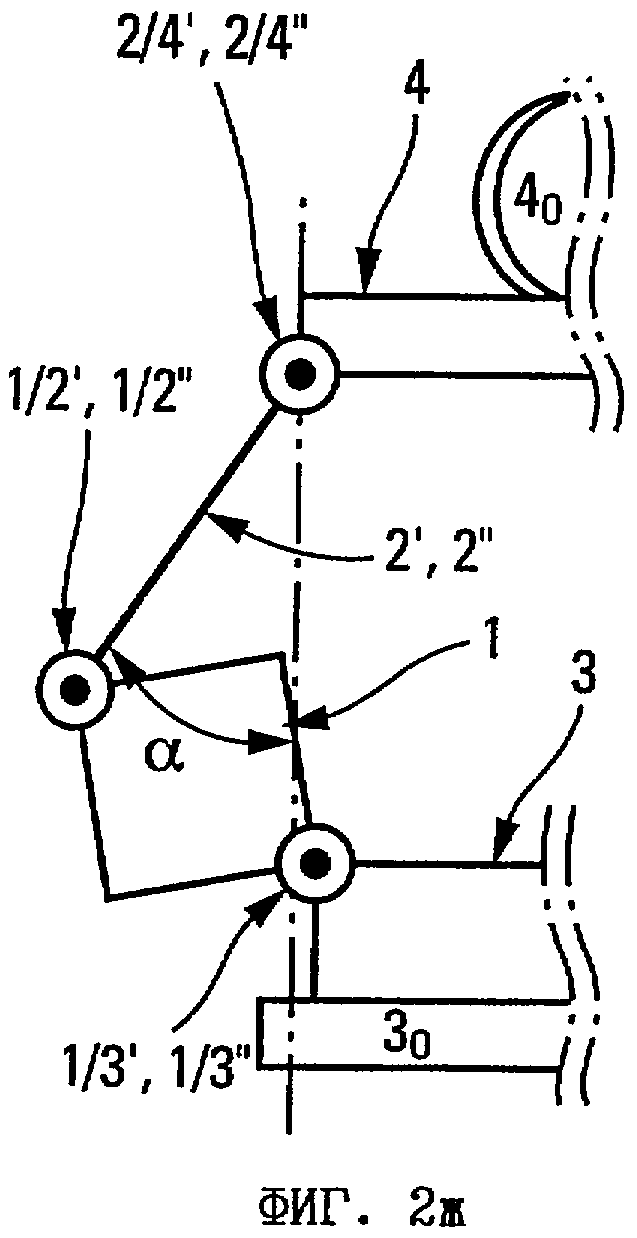
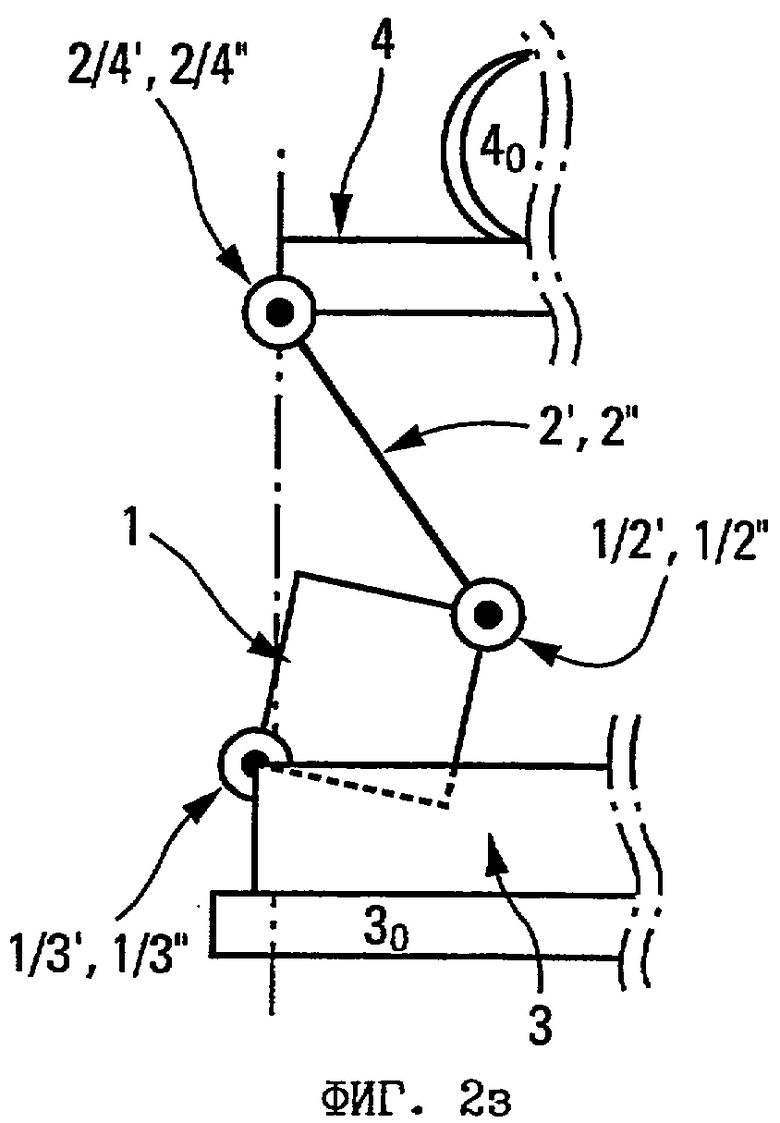
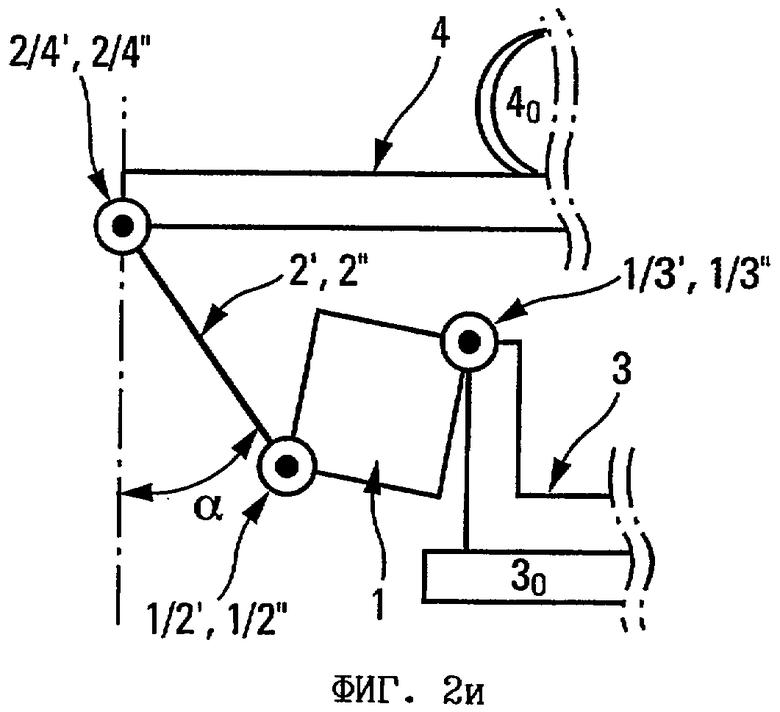
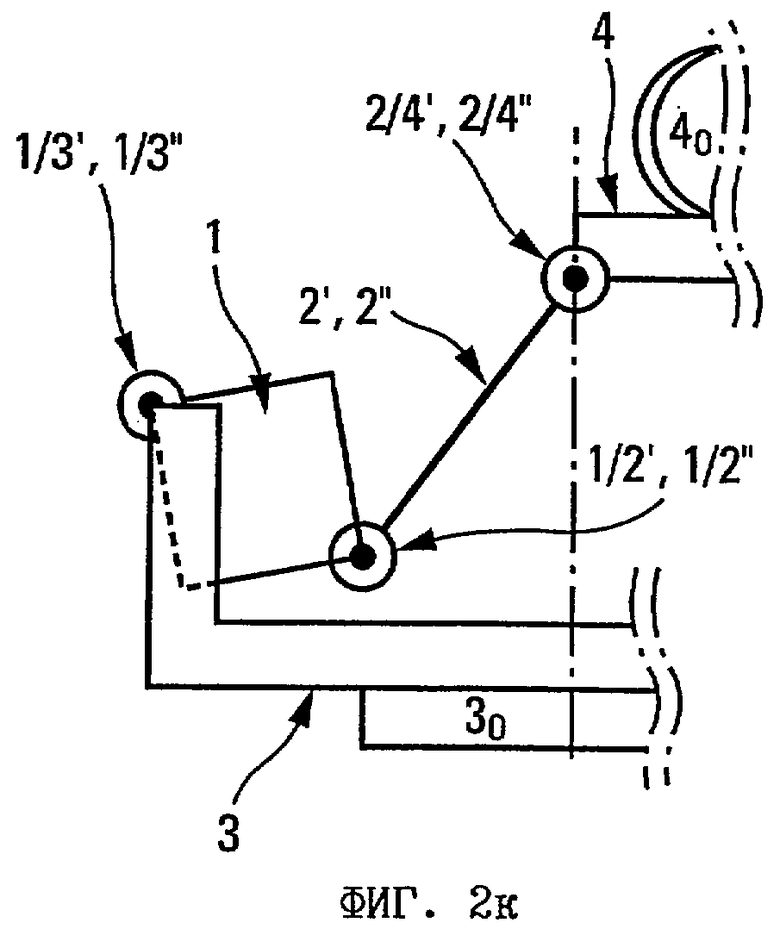
На фиг.2а и 2б схематично в виде сверху показаны два примера разной компоновки простого соединительного устройства в сложное соединительное устройство. На фиг.2в, 2г, 2д, 2е, 2ж, 2з, 2и и 2к схематично в виде сбоку показаны восемь примеров разной компоновки простого соединительного устройства в сложное соединительное устройство. Пример, показанный на фиг.2в в виде сбоку, в виде сверху показан на фиг.2а, а пример, показанный на фиг.2г в виде сбоку, в виде сверху показан на фиг.2б.
В четырех первых вариантах, показанных на фиг.2а, 2б, 2в, 2г, 2д, 2е, 2ж, соединительное звено 2'-2'' простого соединительного устройства расположено снизу. Сложное соединительное устройство в этих вариантах содержит по меньшей мере два простых соединительных устройства (на чертежах не показаны), расположенных рядом с волнистыми оборванными на концах линиями (в правой части чертежей).
В первом варианте, показанном на фиг.2а и 2в, соединительные звенья 2'1 и 2''1 соединены с концами внешнего нижнего края E01 устройства 1 жесткости. В этом варианте первое соединительное устройство 3, которое в данном случае представляет собой опору 3 первого объекта, соединено с концами внутреннего верхнего края Еiu устройства 1 жесткости.
Во втором варианте, показанном на фиг.2б и 2г, соединительные звенья 2' и 2'' соединены с концами внутреннего нижнего края Еi1 устройства 1 жесткости. В этом варианте первое соединительное устройство 3, которое в данном случае представляет собой опору 3 первого объекта, соединено с концами внешнего верхнего края Eou устройства 1 жесткости.
Возможны и другие варианты компоновки простого соединительного устройства в предлагаемое в изобретении сложное соединительное устройство. Так, например, в двух таких вариантах, показанных на фиг.2д и 2е, соединительные звенья 2' и 2'' соединяются с концами внешнего верхнего края Е0u и с концами внутреннего верхнего края Eiu устройства 1 жесткости.
Все описанные выше варианты можно перевернуть сверху вниз на 180° в положения, показанные на фиг.2ж, 2з, 2и и 2к. В этих четырех вариантах, показанных на фиг.2ж, 2з, 2и и 2к, соединительные звенья 2' и 2'' простого соединительного устройства расположены в верхней части сложного соединительного устройства. Кроме того, в этих вариантах первое соединительное устройство 3 выполнено не в виде опоры, к которой первый объект 30 крепится сверху, а в виде основания, которое сверху крепится к одному из соединяемых объектов, а второе соединительное устройство, которое предназначено для соединения сложного соединительного устройства и второго объекта 40, выполнено не в виде основания, а в виде опоры, к которой другой соединяемый объект крепится сверху. Сложное соединительное устройство содержит еще по меньшей два простых соединительных устройства (на чертежах не показаны), расположенных рядом с волнистыми оборванными на концах линиями (в правой части чертежей).
В этих других четырех вариантах первое соединительное устройство 3 расположено снизу и выполнено в виде основания, предназначенного, например, для крепления предлагаемого в изобретении сложного соединительного устройства к корпусу судна. Второе соединительное устройство 4 в этих вариантах расположено сверху и выполнено в виде соответствующей опоры, к которой крепится радиолокатор, антенна или оптический датчик.
На фиг.3а, 3б, 3в и 3г показан первый вариант выполнения предлагаемого в изобретении сложного соединительного устройства. В этом варианте соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 соединены с соответствующими концами внешнего нижнего края E01 соответствующих устройств 11, 12 и 13 жесткости. Концы внутреннего верхнего края Еiu устройств 11, 12 и 13 жесткости соединены с опорой 3.
Как показано на фиг.3а, опору 3 можно выполнить в виде перевернутого конуса, верхнее основание которого образовано шестиугольным кольцом, углы которого соединены шарнирами с устройствами 11, 12 и 13 жесткости трех простых соединительных устройств. Нижнее основание обратного конуса 3 имеет форму круглого кольца, к которому крепится радиолокационная антенна или другой чувствительный элемент, обеспечивающий возможность точного измерения угловых координат соответствующего объекта. Использование в качестве опоры 3 не плоского основания, а перевернутого конуса позволяет уменьшить по высоте положение центра тяжести объекта 30.
Каждое из трех устройств 51, 52 и 53 для демпфирования и амортизации вибраций и ударов одним его концом соединено, как показано на фиг.3а, 3б, 3в и 3г, через соответствующее шарнирное соединительное устройство 5/31, 5/32 и 5/33 с нижним круглым основанием выполненной в виде обратного конуса опоры 3.
В первом варианте выполнения предлагаемого сложного соединительного устройства расчетные углы α между осями соединительных звеньев 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 трех простых соединительных устройств и вертикалью, показанной на фиг.3г, равны арккосинусу квадратного корня из 2/3 или приблизительно 35°. В данном варианте углы α являются внешними, т.е. соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 трех простых соединительных устройств расположены вне воображаемого бесконечно длинного цилиндра 10 с вертикальной центральной осью, на поверхности которого расположены центры их шарнирных соединений 2/4'1, 2/4''1, 2/4'2, 2/4''2, 2/4'3 и 2/4''3.
На фиг.4а, 4б, 4в и 4г показан второй вариант выполнения сложного соединительного устройства, которое при сравнительно больших габаритах в горизонтальной плоскости позволяет уменьшить высоту опоры 3 первого соединяемого объекта 30.
В этом втором варианте соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 соединены с соответствующими концами внешнего верхнего края Еou соответствующих устройств 11, 12 и 13 жесткости. Концы внутреннего нижнего края Ei1 устройств 11, 12 и 13 жесткости соединены с опорой 3.
Во втором варианте выполнения сложного соединительного устройства расчетные углы α между осями соединительных звеньев 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 трех простых соединительных устройств и вертикалью, показанной на фиг.4г, равны арккосинусу квадратного корня из 2/3 или приблизительно 35°. В данном варианте углы α являются внутренними, т.е. соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 трех простых соединительных устройств расположены внутри воображаемого бесконечно длинного цилиндра 10 с вертикальной центральной осью, на поверхности которого расположены центры их шарнирных соединений 2/4'1, 2/4''1, 2/4'2, 2/4''2, 2/4'3 и 2/4''3.
Возможны и другие, не показанные на чертежах варианты выполнения сложного соединения, в которых устройства 11, 12 и 13 жесткости расположены снизу, а соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 сверху. В этих вариантах устройства 11, 12 и 13 жесткости соответствующими шарнирами соединены с основанием 3, к которому крепится один из соединяемых объектов. При этом соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 шарнирно соединены с опорой 4 другого объекта.
В этих вариантах в отличие от рассмотренных выше первого и второго вариантов выполнения сложного соединительного устройства расположенные внутри используемых в качестве устройств 11, 12 и 13 жесткости коробчатых кожухов объекты не защищены от воздействия внешних вибраций и ударов. Поэтому при размещении внутри кожухов 11, 12 или 13 различной чувствительной к вибрациям и ударам электроники целесообразнее использовать обладающее лучшими виброизолирующими свойствами сложное соединительное устройство, которое выполнено по первому или второму варианту.
Преимуществом этих вариантов по сравнению с первым и вторым вариантами является возможность использования в них более тяжелых по сравнению с соединительными звеньями 2'1, 2''1, 2'2, 2''2, 2'3, 2''3 устройств 11, 12 и 13 жесткости. Низкое расположение устройств 11, 12 и 13 жесткости позволяет при тех же самых собственных частотах поступательных перемещений соединяемых объектов значительно уменьшить жесткость и массу пружин.
На фиг.5а, 5б, 5в и 5г показан третий вариант сложного соединительного устройства. Предлагаемое в этом варианте соединительное устройство имеет три опоры 31, 32 и 33, к которым жестко крепятся три не вращающиеся имеющие коробчатую форму антенны 61, 62 и 63.
Предлагаемое в этом варианте сложное соединительное устройство имеет соединительные звенья 2'1, 2''1, 2'2, 2''2, 2'3, 2''3, которые соединены с соответствующими концами внешнего нижнего края E01 соответствующих устройств 11, 12 и 13 жесткости. Концы внутреннего верхнего края Еiu устройств 11, 12 и 13 жесткости соединены с опорами 31, 32 и 33.
Как показано на фиг.5а, 5б, 5в и 5г, предлагаемое в третьем варианте сложное соединительное устройство имеет шесть устройств 5'1, 5''1, 5'2, 5''2, 5'3, 5''3 для демпфирования и амортизации вибраций и ударов, выполненных, в частности, в виде канатных виброизолирующих опор (опор канатного типа), защищающих антенны от внешних вибраций и ударов.
Устройства 5'1, 5'2 и 5'3 для демпфирования и амортизации вибраций и ударов расположены под антеннами 61, 62 и 63 и соединены с ними жестко, но не непосредственно. Жесткое соединение устройств для демпфирования и амортизации вибраций и ударов с антеннами обеспечивается расположенными на внутренних верхних краях этих устройств 5'1, 5'2 и 5'3 установочными элементами 5/6'1, 5/6'2 и 5/6'3. Внешние нижние края устройств 5'1, 5'2 и 5'3 для демпфирования и амортизации вибраций и ударов жестко, но не непосредственно, с помощью установочных элементов 5/4'1, 5/4'2 и 5/4'3 соединены с нижним шестиугольным кольцом 4.
Устройства 5''1, 5''2 и 5''3 для демпфирования и амортизации вибраций и ударов расположены над антеннами и соединены жестко, но не непосредственно с промежуточными соединительными элементами (например, пластинами жесткости) 7''1, 7''2 и 7''3. Жесткое, но не непосредственное соединение устройств 5''1, 5''2 и 5''3 для демпфирования и амортизации вибраций и ударов с промежуточными соединительными элементами обеспечивается расположенными на внутренних нижних краях этих устройств установочными элементами 5/7''1, 5/7''2 и 5/7''3.
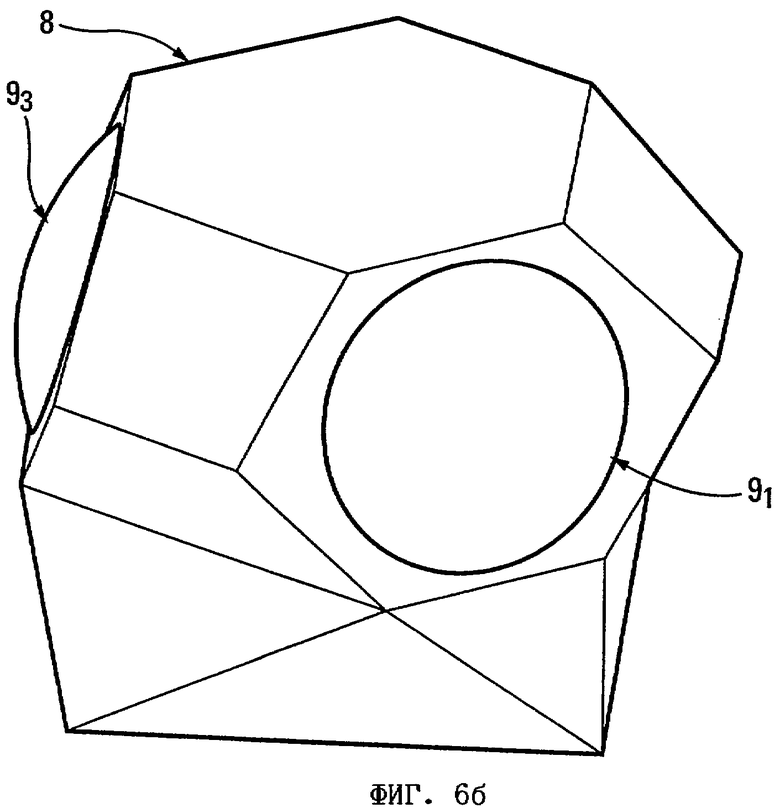
Внешние верхние края устройств 5''1, 5''2 и 5''3 для демпфирования и амортизации вибраций и ударов можно жестко, но не непосредственно соединить, например, с внешним кожухом 8, выполненным в виде антенной мачты (фиг.6а и 6б), используя для этого установочные элементы 5/8''1, 5/8''2 и 5/8''3.
На фиг.5а для используемой в предлагаемом в изобретении соединительном устройстве канатной виброизолирующей опоры 5''3 показано "направление сдвига". Аналогичным образом для той же виброизолирующей опоры 5''3 на фиг.5б показаны "направление сжатия-растяжения" и "направление скручивания".
Направления сжатия-растяжения канатных виброизолирующих опор 5'1, 5''1, 5'2, 5''2, 5'3, 5''3 наклонены к вертикали под углом 45°. Кроме того, все канатные виброизолирующие опоры 5'1, 5''1, 5'2, 5''2, 5'3, 5''3 расположены таким образом, что их направления сжатия-растяжения пересекаются приблизительно в центре тяжести системы, состоящей из устройств 11, 12 и 13 жесткости, антенн 61, 62 и 63, опор 31, 32 и 33 и промежуточных соединительных элементов 7'1, 7''1, 7'2, 7''2, 7'3 и 7''3. При этом канатные виброизолирующие опоры 5'1 и 5''2 расположены относительно антенны 61 точно так же, как и виброизолирующие опоры 5'2 и 5''2 расположены относительно антенны 62 и как виброизолирующие опоры 5'3 и 5''3 расположены относительно антенны 63.
При таком расположении канатных виброизолирующих опор, которые могут иметь разную жесткость в направлениях скручивания, сдвига и сжатия-растяжения, собранное из них сложное соединительное устройство с шестью канатными виброизолирующими опорами 5'1, 5''1, 5'2, 5''2, 5'3, 5''3 будет иметь равные значения жесткости во всех направлениях. Поэтому и виброизолирующие свойства во всех направлениях и собственные частоты трех основных видов колебаний сложного соединительного устройства с расположенными таким образом шестью канатными виброизолирующими опорами 5'1, 5''1, 5'2, 5''2, 5'3, 5''3 будут приблизительно одними и теми же.
В несколько измененном виде сложное соединительное устройство, выполненное по третьему варианту, показано на фиг.6а и 6б. Показанное на этих чертежах сложное соединительное устройство закрыто наружным кожухом 8, внутри которого находятся все его узлы и детали.
Такой наружный кожух 8 можно выполнить в виде антенной мачты, закрывающей сложное соединительное устройство сверху и сбоку. Наличие такого кожуха расширяет возможности предлагаемого в изобретении сложного соединительного устройства и позволяет использовать его для соединения со вторым объектом разных первых объектов, в частности трех не изолированных антенн 61, 62 и 63, которые вместе с опорами 31, 32 и 33 и промежуточными соединительными элементами 7'1, 7''1, 7'2, 7''2, 7'3 и 7''3, используя для этого пружины, расположенные над или под антеннами, можно расположить внутри кожуха. Такой вариант выполнения сложного соединительного устройства позволяет минимизировать влияние на антенны опрокидывающих моментов, возникающих, в частности, при движении судна.
Кроме того, переднюю сторону каждой радиолокационной антенны 61, 62 и 63 можно закрыть закрепленным на мачте 8 обтекателем 91, 92 и 93, как это показано на фиг.6а и 6б.
Для защиты не вращающихся антенн от опрокидывающих моментов и повышения угловой точности измерения положения объектов устройства 5 (5'1, 5''1, 5'2, 5''2, 5'3, 5''3) для демпфирования и амортизации вибраций и ударов можно расположить на нижней и верхней стенках антенн 6 (61, 62 и 63) и/или на пластинах жесткости промежуточных соединительных элементов 7 (7'1, 7''1, 7'2, 7''2, 7'3 и 7''3) антенн.
В каждом конкретном случае применения такого сложного соединительного устройства опоры 3 и 4 должны быть специально приспособлены для крепления радиолокаторов, антенн или оптических датчиков. Предлагаемое в изобретении сложное соединительное устройство можно, в частности, использовать для установки радиолокаторов, антенн и/или оптических датчиков на борту любого движущегося объекта или транспортного средства, например судна, наземного транспортного средства, самолета, ракеты и т.д.
Предлагаемые сложные соединительные устройства можно использовать для виброизоляции установленных на земле электронных шкафов и их защиты от вибраций и ударов, например, в сейсмически активных районах или при ядерных взрывах.
В самом общем случае предлагаемые сложные соединительные устройства предназначены для использования в качестве опор любых объектов, которые могут совершать любые поступательные движения, но не должны совершать никаких вращательных или поворотных движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОИЗОЛИРУЮЩАЯ ВСТАВКА В ТРУБОПРОВОД | 2002 |
|
RU2228482C2 |
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 2011 |
|
RU2476667C1 |
| Приспособление для касательного разъемного соединения между собой двух труб, расположенных в пространстве под фиксированным углом друг к другу (варианты) | 2016 |
|
RU2610813C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ВСТАВКА В ТРУБОПРОВОД | 1994 |
|
RU2101600C1 |
| СТЕНД ДЛЯ ОЦЕНКИ ЭФФЕКТИВНОСТИ УПРУГИХ СВЯЗЕЙ СИСТЕМЫ АМОРТИЗАЦИИ ДИЗЕЛЬ-ГЕНЕРАТОРА | 2022 |
|
RU2798630C1 |
| ПОДВЕСКА КАБИНЫ БУРОВОГО СТАНКА | 2019 |
|
RU2725432C1 |
| РАМНЫЙ УЗЕЛ РАБОЧЕЙ МАШИНЫ (ВАРИАНТЫ) И РАБОЧАЯ МАШИНА | 2016 |
|
RU2714662C2 |
| Виброизолирующая опора | 1982 |
|
SU1104324A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |











Заявленное изобретение относится к соединительным устройствам, в частности к соединительным устройствам, используемым для крепления радиолокаторов, антенн или оптических датчиков преимущественно судовых навигационных систем. Простое соединительное устройство состоит из устройства жесткости, предназначенного для придания ему необходимой крутильной жесткости, двух соединительных звеньев, соединяющих устройство жесткости со вторым соединяемым объектом, двух первых шарнирных соединительных устройств, соединяющих непосредственно или опосредованно соединительные звенья с двумя отдельными точками второго соединяемого объекта, двух вторых шарнирных соединительных устройств, соединяющих в двух разных точках устройство жесткости с каждым соединительным звеном, и двух третьих шарнирных соединительных устройств, соединяющих непосредственно устройство жесткости с двумя отдельными точками первого соединяемого объекта. В результате устройство состоит из небольшого количества деталей и при этом обладает достаточной жесткостью. При этом соединяемые объекты могут совершать поступательные перемещения, но не могут поворачиваться друг относительно друга вокруг любой оси. 5 з.п. ф-лы, 25 ил.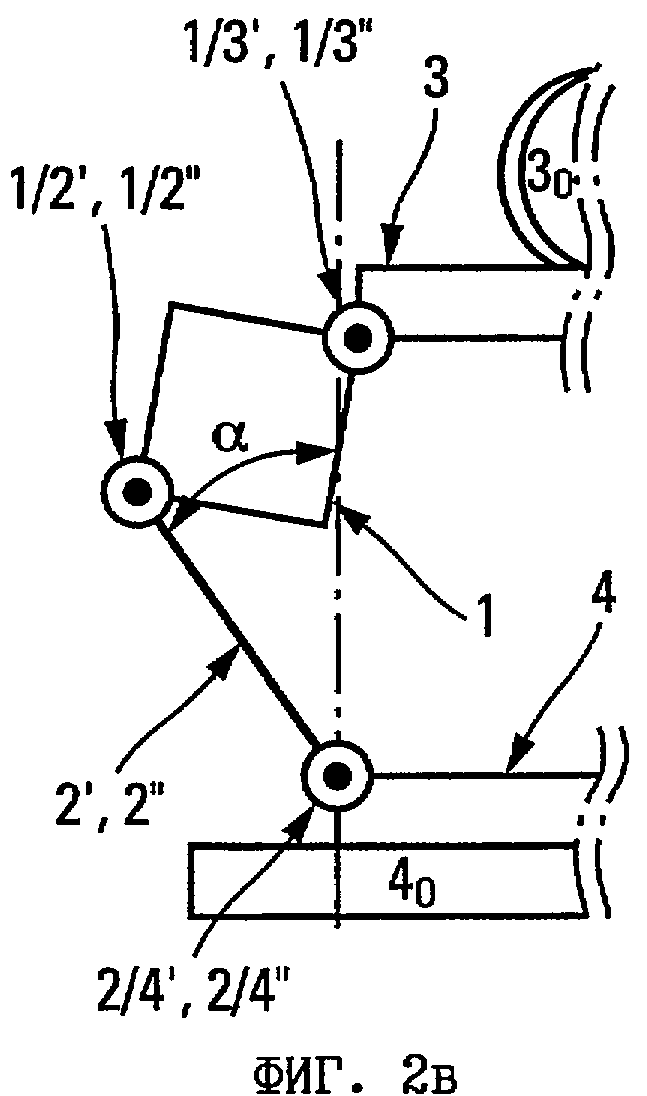
| US 3865340 А, 11.02.1975 | |||
| US 3419238 А, 31.12.1968 | |||
| US 3871778 А, 18.03.1975 | |||
| US 5663486 А, 02.09.1997. |

