Изобретение относится к области машиностроения и может быть использовано в подвесках транспортных средств, оборудования, различных приборов и аппаратуры, а также в конструкциях кресел человека-оператора.
Изменение динамического состояния различных механических систем в настоящее время связано с введением в структуру виброзащитных колебательных систем различных связей в виде устройств, способных изменять частоты собственных колебаний и режимы динамического гашения, что позволяет обеспечить необходимые свойство виброзащитной системы. Возможности данных подходов ограничиваются элементами конструктивной реализации устройств, способных рассеивать энергию колебаний. В связи с этим актуальным направление является поиск других конструктивных решений, основанных на новых способах изменении динамического состояния виброзащитной системы.
Известно устройство для защиты от вибраций [Остроменский П.И., Никифоров И.С., Кинаш Н.Ж., Остроменская В.А. «Виброзащитная подвеска сидения», патент 2156192 C2 RU, МПК B60N 2/54, приоритет от 15.07.1996]. Виброзащитная подвеска сиденья, содержащая несущую опору и подвесную опору, между которыми закреплен основной упругий подвес и корректор жесткости - дополнительный упругий подвес с неустойчивым средним положением равновесия, отличающаяся тем, что корректор жесткости выполнен из двух одинаковых, сжатых до овальной формы упругих кольцевых элементов, расположенных друг против друга симметрично относительно продольной оси симметрии сиденья, причем ближайшие участки упругих кольцевых элементов прикреплены шарнирно к одной опоре, а диаметрально противоположные участки кольцевых элементов шарнирно соединены с другой опорой, при этом большие оси симметрии сжатых упругих кольцевых элементов и оси всех их шарнирных соединений с опорами параллельны продольной оси сиденья. Виброзащитная подвеска сиденья по п.1, отличающаяся тем, что каждый упругий кольцевой элемент выполнен из троса. Виброзащитная подвеска сиденья по п.1, отличающаяся тем, что каждый упругий кольцевой элемент выполнен в виде бухты, намотанной, например, из пружинной ленты или проволоки с возможностью относительного перемещения витков с трением. Недостатком данного изобретения является наличие неустойчивого среднего положения корректора, что при динамических воздействиях может привести к неустойчивости виброзащитной системы в целом. Также к недостаткам следует отнести невозможность изменять параметры виброзащитной системы в широком диапазоне частот.
Известен способ виброизоляции и виброизолятор с квазинулевой жесткостью [Кочетов О.С., Кочетова М.О., Ходакова Т.Д. «Способ виброизоляции и виброизолятор с квазинулевой жесткостью», патент 2298119 C1 RU, МПК F16F 7/08, F16F 9/06, приоритет от 19.09.2005]. Способ виброизоляции, заключающийся в том, что виброизолируемый объект устанавливают на плоские упругие элементы, а демпфирование колебаний осуществляют с помощью демпфера, при этом плоские упругие элементы выполняют в виде пакета упругих элементов арочного типа, а демпфирование колебаний осуществляют с помощью вязкоупругого демпфера, выполненного в виде упругодемпфирующего кольца, связанного с упругими элементами через втулки и расположенного в плоскости, перпендикулярной вертикальной оси пакета упругих элементов, за счет радиальной деформации упругих элементов. Виброизолятор с квазинулевой жесткостью, содержащий плоские упругие и демпфирующие элементы, при этом плоские упругие элементы выполнены в виде пакета упругих элементов арочного типа в виде набора чередующихся во взаимно перпендикулярных направлениях плоских пружин, опирающихся на основание, а демпфирующий элемент виброизолятора выполнен в виде упругодемпфирующего кольца из эластомера, расположенного по замкнутому контуру в плоскости, перпендикулярной оси виброизолятора, и взаимодействующего со втулками, которые связаны с опорными участками плоских пружин посредством заклепок, причем упругодемпфирующее кольцо имеет в поперечном сечении форму круга, эллипса, треугольника, квадрата, прямоугольника, многоугольника. Виброизолятор с квазинулевой жесткостью по п.2, отличающийся тем, что упругодемпфирующее кольцо выполнено полым и имеет в поперечном сечении форму круга, эллипса, треугольника, квадрата, прямоугольника, многоугольника. Виброизолятор с квазинулевой жесткостью по п.3, отличающийся тем, что полость упругодемпфирующего кольца заполнена вязкой жидкостью или сжатым до определенного давления воздухом или газом. Недостатками данного изобретения являются: необходимость при гашении колебаний использовать дополнительно демпфер вязкого трения; невозможность настройки устройства в процессе работы на необходимые режимы, в частотности отстраиваться от резонансных частот, осуществлять настройку режимов динамического гашения, получать условия «отрицательной» жесткости.
К наиболее близкому техническому решению следует отнести способ регулирования жесткости виброизолирующего устройства компактного сидения для человека-оператора транспортно-технологической машины и виброизолирующее устройство для реализации способа [Говердовский В.Н., ЛИ Чен-Мён. «Способ регулирования жесткости виброизолирующего устройства компактного сидения для человека-оператора транспортно-технологической машины и виброизолирующее устройство для реализации способа», патент 2214335 C2 RU, МПК B60N 2/50, приоритет от 04.05.2001]. Способ регулирования жесткости виброизолирующего устройства сиденья для человека-оператора транспортно-технологической машины, заключающийся в смягчении упругого элемента виброизолирующего устройства путем деформирования дополнительного упругого элемента в закритической области по одной из координат до второй формы изгиба, его нагружения по другой координате до одной из критических точек исходной формы равновесия и последующего совместного деформирования обоих упругих элементов за критической точкой, отличающийся тем, что до сообщения системе колебаний присоединяют поочередно к упругому элементу и дополнительному упругому элементу подвижные структурные элементы, имеющие параметры, связанные между собой передаточной функцией Ф, при этом параметры дополнительного упругого элемента определяют из условия k2(φ)=-k1(min)(q)/Ф, где k2(φ) - крутильная "отрицательная" жесткость дополнительного упругого элемента в направлении локальной угловой координаты φ и связанная с ней нелинейной зависимостью, k1(min)(q) - минимальная жесткость упругого элемента в направлении обобщенной координаты q, далее деформируют дополнительный упругий элемент до начального рабочего состояния и фиксируют его в таком состоянии, затем обеспечивают контакт подвижных структурных элементов между собой до образования кинематической цепи, не изменяющей начальных структурных и геометрических характеристик системы, после чего освобождают дополнительный упругий элемент из фиксированного состояния, нагружают виброизолирующее устройство и удерживают его на участке минимальной по модулю суммарной жесткости упругого элемента и дополнительного упругого элемента путем параметрической стабилизации последнего в соответствии с изменениями жесткости упругого элемента. Виброизолирующее устройство для реализации данного способа, содержащее основание, упругий элемент, включающий упругие звенья, рычажный направляющий механизм, механизм регулирования статической нагрузки и дополнительный упругий элемент, включающий размещенные соосно друг другу корпус и втулку, установленную с возможностью вращения, а также плоские тонкостенные конструкции, центральные сечения которых закреплены во втулке, а концы - в корпусе с возможностью упругого изгиба по второй форме при деформировании тонкостенных конструкций в закритической области по одной из координат, отличающееся тем, что в него введен передаточный механизм, включающий опору, установленную на основании, и, по меньшей мере, два подвижных структурных элемента, один из которых в зависимости от функционального назначения передаточного механизма является ведущим и установлен соосно оси вращения, по меньшей мере, одного из рычагов направляющего механизма, а второй подвижный структурный элемент соответственно является ведомым и связан с втулкой, при этом дополнительный упругий элемент снабжен устройством для регулирования начального рабочего положения и диапазона рабочих угловых перемещений втулки, выполненным в виде стоек, жестко закрепленных на корпусе, упоров и рычага, причем один конец последнего установлен на втулке, а другой размещен между упорами, установленными на соответствующих стойках с возможностью перемещения относительно корпуса и последующего фиксирования выбранного положения. Основным недостатком данного изобретения является необходимость и сложность настройки устройства на рабочие режимы виброзащитной системы, и отсутствие возможности изменения параметров виброзащитной системы в процессе работы.
Цель предлагаемого изобретения заключается в том, чтобы простейшим способом обеспечить гашение вибраций объекта защиты.
Цель достигается тем, что виброзащитная система включает дополнительные упругие элементы в виде масс и вращающихся вокруг вертикальной оси, что создает центробежные силы, обеспечивающие изменение суммарной жесткости устройства, причем вращение масс создает отрицательную жесткость, и она зависит от угловой скорости вращения, определяемой по формуле:
где m1 - вращающееся массы, создающие центробежную силу;
ω0 - угловая скорость вращения двухзвенника;
α0 - угол между плечами двухзвенника.
Причем упругие дополнительные устройства представлены в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и объектом защиты в возможность создания центробежных инерционных сил вращения вокруг вертикальной оси.
Виброзащитное устройство для реализации способа предусматривает, что упругие дополнительные устройства представлены в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и с объектом защиты с возможностью создания центробежных инерционных сил при вращении из вокруг вертикальной оси.
Сущность предлагаемого изобретения поясняется нижеследующим описанием и чертежами.
На фиг.1 показана схема виброзащитной системы с регулированием ее жесткости.
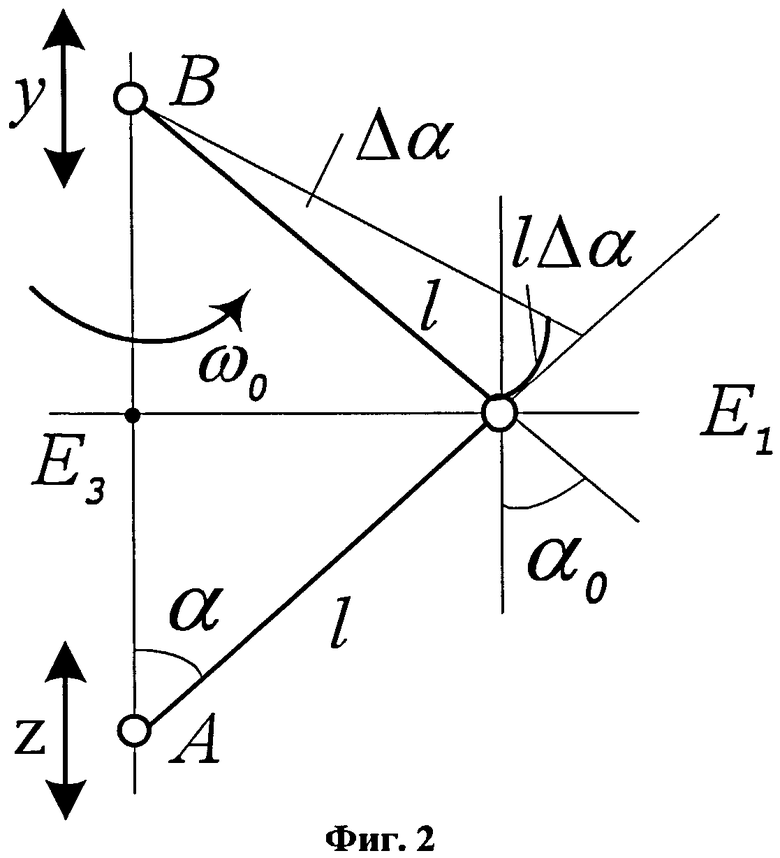
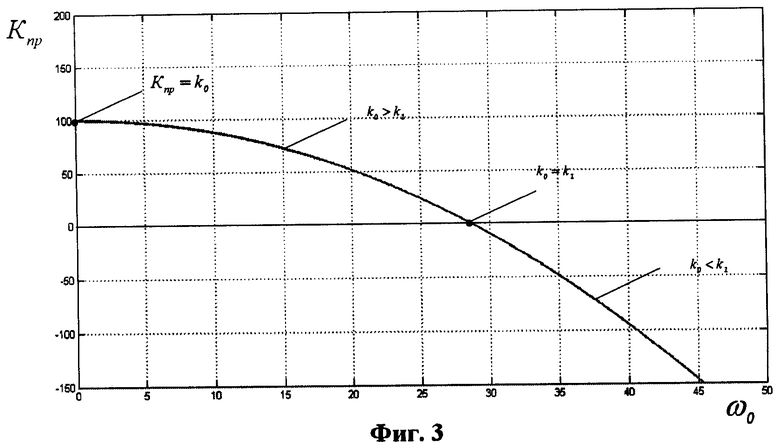
На фиг.2 приведена схема смещений и скоростей движения масс. На фиг.3 показана зависимость приведенной жесткости виброзащитной системы от угловой скорости.
На фиг.1 представлена виброзащитная система с регулированием ее жесткости, состоящая из основания 1, объекта защиты 2, пружины 3, массы 4, рычагов 5 и шарнирных соединений 6 и 7.
Для расчета жесткости виброзащитной системы введены следующие обозначения: объект защиты массой m0; базовый упругий элемент с жесткостью k0 и упругий элемент в виде двухзвенного механизма с дополнительными массами m1, вращающихся вокруг вертикальной оси. Жесткость при вращении двухзвенника обозначена через k1; упругие свойства механизма формируются центробежными силами инерции при вращении элементов с массами m1 при постоянной скорости вращения ω0. Звенья рычагов по длине приняты одинаковыми и равными l. Внешнее воздействие носит кинематический характер - основание колеблется по известному закону (движение принято гармоническим). Колебания в системе происходят при смещении основания z=z0sinωt, то есть основание вибрирует. Двухзвенник с двумя массами m1 вращается с постоянной угловой скоростью ω0. Объект массой m0 движется относительно неподвижной системы координат и характеризуется координатой y. Массы m1 участвуют в сложном движении, определяемом участием во вращении вокруг вертикальной оси АВ с угловой скоростью ω0=const; вектор линейной скорости масс m1 перпендикулярен плоскости рисунка и определяется как

При этом вводится условие, что α=α0+Δα, где α0 - угол, характеризующий стационарное положение, относительно которого происходят малые колебания Δα. В свою очередь, Δα связано с относительным смещением объекта m0 относительно основания (y-z).
На фиг.2 приведена схема смещений и скоростей движения масс m1; показано взаимное расположение точек A1B и E, участвующих в движении.
Полагая Δα малым, можно записать, что

откуда

Скорость точек E1 и E2 в абсолютном движении найдем по теореме сложения скоростей. Один из видов плоского движения масс - это движение в плоскости, состоящее из переносного движения со скоростью  и относительного движения в форме вращения точки Е1 (и Е2) относительно точки B -
и относительного движения в форме вращения точки Е1 (и Е2) относительно точки B -  . Тогда
. Тогда

Скорость точек E1 и Е2 во вращении вокруг оси АВ имеет вид

Скорость массы m1 в абсолютном движении

Что касается Vотн, то скорость равна


В свою очередь

Знание Va6c необходимо для определения кинетической энергии масс m1.
Кинетическая энергия системы имеет вид

или


Развернем выражение (12)
Потенциальная энергия системы определяется деформацией упругих элементов и положением сил тяжести. Потенциальная энергия упругих элементов имеет вид

Будем полагать, что система колеблется относительно своего положения равновесия, поэтому компоненту обобщенной силы от действия сил тяжести можно, в первом приближении, не учитывать, хотя силы инерции масс при вращении изменяют положение равновесия.
Потенциальная энергия сил тяжести в случае необходимости может быть найдена

Система дифференциальных уравнений движения в координатной системе y, в конечном итоге, принимает вид
Приняв в правой части выражения (15) постоянные члены в виде

можно перейти к условию Δ=0, или ввести систему координат, учитывающую смещение положения статического равновесия, тогда система дифференциальных уравнений (14) может быть приведена к виду

Передаточная функция в такой системе имеет вид

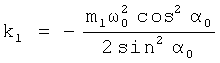
Из анализа передаточной функции (19) следует, что введенный параллельно упругому элементу базовой модели k0 механизм, состоящий из вращающихся масс, является пружиной с отрицательной жесткостью k1

Наличие пружины с отрицательной жесткостью позволяет создать режимы с квазинулевой жесткостью, с выбором в качестве настроечных параметров m1, ω0 и α0, независимо от частоты внешнего воздействия ω.
Приведенная жесткость виброзащитной системы в целом определиться выражением

Отметим, что в такой виброзащитной системе возможна реализация режима динамического гашения

где  - безразмерный коэффициент.
- безразмерный коэффициент.
В данном случае пружина с отрицательной жесткостью реализуется через механизм регулятора вращения.
Для апробации предлагаемого способа было проведено моделирование. График зависимости приведенной жесткости виброзащитной системы от угловой скорости Kпр (ω0) представлен на фиг.3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Способ и устройство формирования заданной формы квазинулевой статической характеристики виброзащитного механизма сиденья оператора | 2022 |
|
RU2779919C1 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| Устройство для гашения колебаний | 2017 |
|
RU2668933C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ОБЪЕКТА ЗАЩИТЫ | 2011 |
|
RU2522194C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛЯТОР С КВАЗИНУЛЕВОЙ ЖЕСТКОСТЬЮ | 2005 |
|
RU2298119C1 |
Изобретения относятся к машиностроению. Способ регулирования жесткости заключается в установке пружины с положительной жесткостью и дополнительного упругого элемента в виде вращающихся масс. Вращение масс вокруг вертикальной оси создает центробежные силы, обеспечивающие изменение суммарной жесткости устройства. Вращение масс создает «отрицательную» жесткость, которая зависит от угловой скорости вращения. Виброзащитное устройство содержит упругие дополнительные элементы в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и объектом защиты. Достигается упрощение способа гашения вибрации. 2 н.п. ф-лы, 3 ил.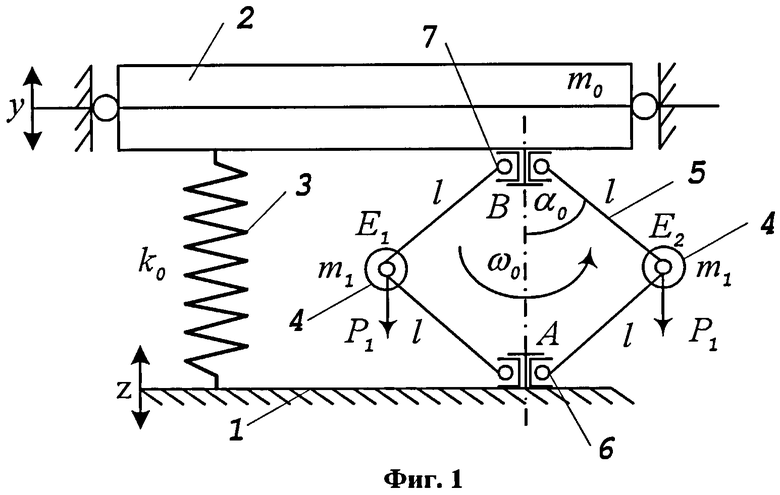
1. Способ регулирования жесткости виброзащитной системы, заключающийся в установке пружины с положительной жесткостью, отличающийся тем, что включают дополнительные упругие элементы в виде масс и, вращая их вокруг вертикальной оси, создают центробежные силы, обеспечивающие изменение суммарной жесткости устройства, причем вращение масс создает «отрицательную» жесткость и она зависит от угловой скорости вращения, определяемой по формуле:
 ,
,
где m1 - вращающиеся массы, создающие центробежную силу;
ω0 - угловая скорость вращения двухзвенника;
α0 - угол между плечами двухзвенника.
2. Виброзащитное устройство для реализации способа по п.1, содержащее упругие дополнительные элементы, отличающееся тем, что упругие дополнительные элементы представлены в виде отдельных масс, соединенных шарнирно с помощью рычагов с основанием и объектом защиты с возможностью создания центробежных инерционных сил вращения вокруг вертикальной оси.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| RU 94016944, 10.05.1996 | |||
| CN 85109107 A, 06.05.1987 | |||
| Устройство для регулирования возбуждения синхронного компенсатора | 1959 |
|
SU127741A1 |

