Изобретение относится к военной технике, в частности к средствам бомбардировки надводных целей.
Известна авиационная бомба, содержащая систему управления но патенту РФ на изобретение №2232973.
Недостаток - низкая скорость полета на конечном участке траектории и недостаточная эффективность управления.
Известна управляемая авиационная бомба FX 1400, Германия, сайт Интернет http://base13/glasnet.ru, Эта бомба содержит корпус, внутри которого установлено взрывное устройство, систему управления, стабилизаторы, привода стабилизаторов.
Известна торпеда авиационная из сайта Интернет http://www.airwar.ru, прототип, (Приложение 1), которая содержит осесимметричный корпус, установленные внутри него взрывное устройство, винтовой гидравлический двигатель с приводом от воздушной турбины и баллон со сжатым воздухом, а также система управления при помощи рулей. Система управления работает только под водой.
Недостатки такой торпеды: низкая скорость на последнем участке траектории и очень низкая точность попадания. Вероятность поражения линкора при бомбометании с высоты 7 км составляет 0,13, а при бомбометании с высоты 4...5 км - примерно 0,2...0,3, что практически недопустимо из-за большой стоимости бомбы и невозможности бомбардировок с более низких и даже с указанных высот. При бомбардировке с высот 20 км ... 30 км, бомбардировщик остается практически неуязвимым, но вероятность попадания даже управляемой авиационной бомбы в круг диаметром 1 км равна практически нулю.
Задача изобретения - повышение скорости полета авиационной торпеды, и точности попадания при ее сбрасывании на большом расстоянии от цели и с очень больших высот.
Решение указанной задачи достигнуто в торпеде авиационной, содержащей корпус осесимметричной формы, внутри которого установлено взрывное устройство, баллон со сжатым воздухом и система управления, при этом внутри корпуса установлен топливный бак, газотурбинный двигатель, работающий на жидком топливе, содержащий воздухозаборник, компрессор, камеру сгорания и турбину, топливный бак соединен с газотурбинным двигателем топливопроводом, в котором установлен топливный насос с приводом насоса, к ротору газотурбинного двигателя подсоединена главная пневматическая турбина для использования газотурбинного двигателя в качестве винтового гидравлического движителя при движении торпеды под водой, на заднем торце корпуса установлены соосно с газотурбинным двигателем четыре управляющих винтовых гидравлических двигателя с пневматическими турбинами, а на боковой поверхности корпуса в его задней части установлены радиально четыре рулевых реактивных сопла, система управления содержит бортовой компьютер, соединенный с контроллером управления. Контроллер управления соединен с регуляторами. Привод насоса соединен с контроллером управления, который, в свою очередь, соединен с бортовым компьютером. К бортовому компьютеру подключено приемно-передающее устройство с антенной. Система управления может содержать приемник системы глобального позиционирования, подключенный к антенне и к бортовому компьютеру. Система управления может содержать видеокамеру, подключенную к бортовому компьютеру.
Проведенные патентные исследования показали, что предложенное техническое решение обладает новизной, изобретательским уровнем и промышленной применимостью.
Сущность изобретения поясняется на фиг.1...6, где
на фиг.1 приведена принципиальная схема простейшего варианта авиационной торпеды,
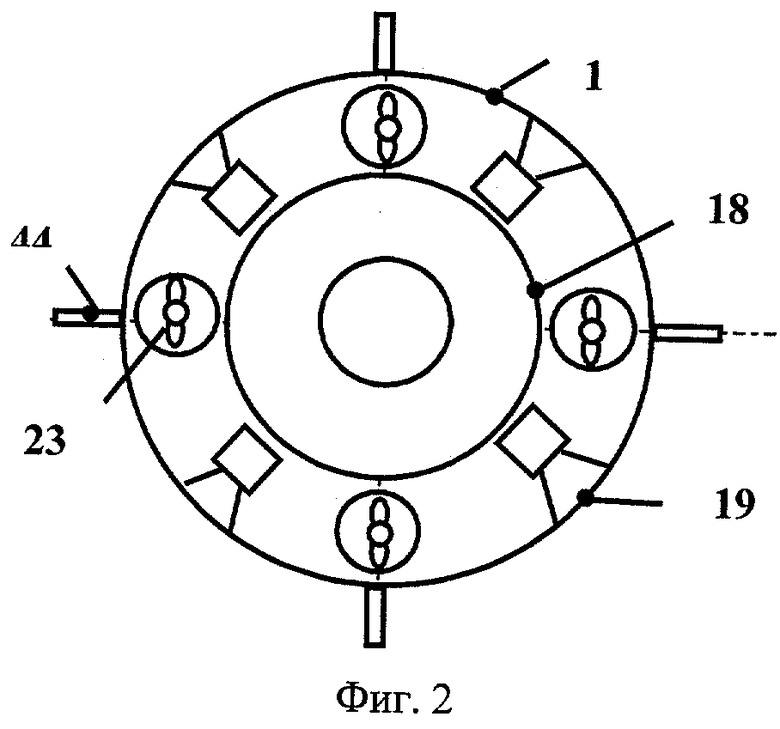
на фиг.2 приведена схема авиационной торпеды с автономным управлением,
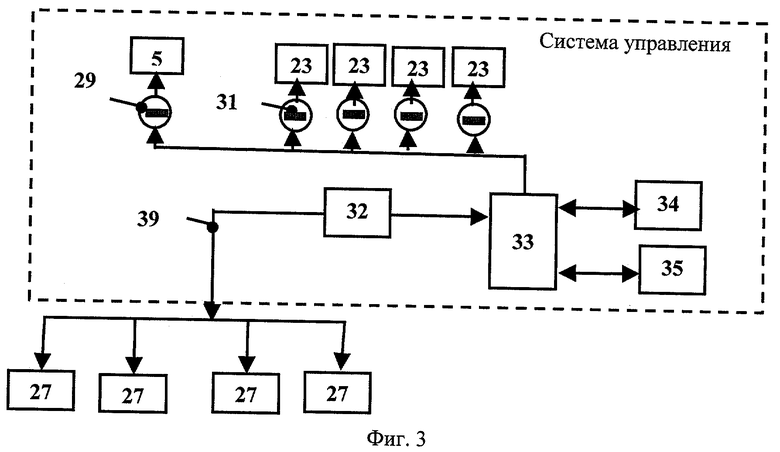
на фиг.3 приведена радиоуправляемая авиационная бомба,
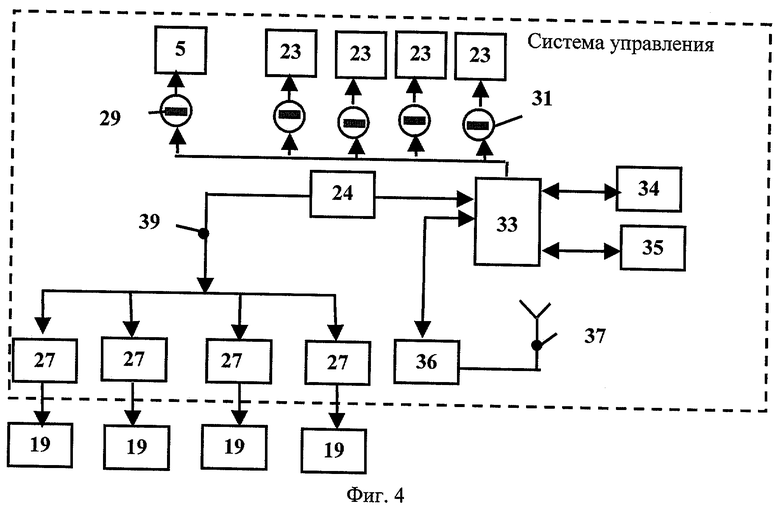
на фиг.4 приведена авиационная торпеды с управлением при помощи системы глобального позиционирования,
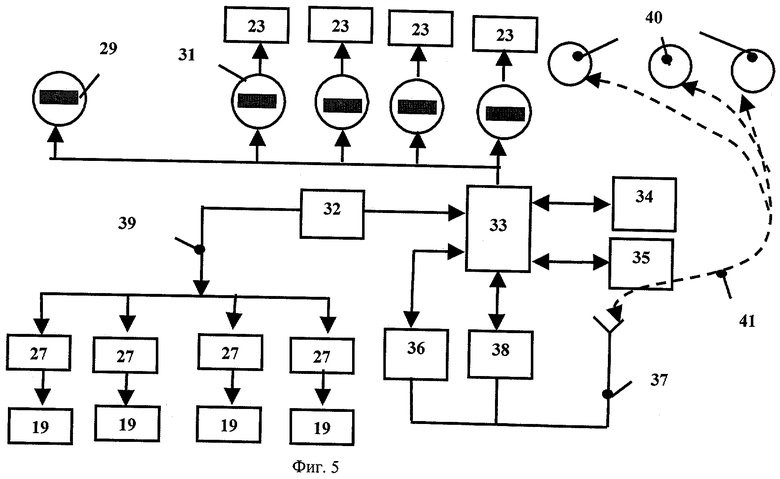
на фиг.5 приведена авиационная торпеда с видеокамерой,
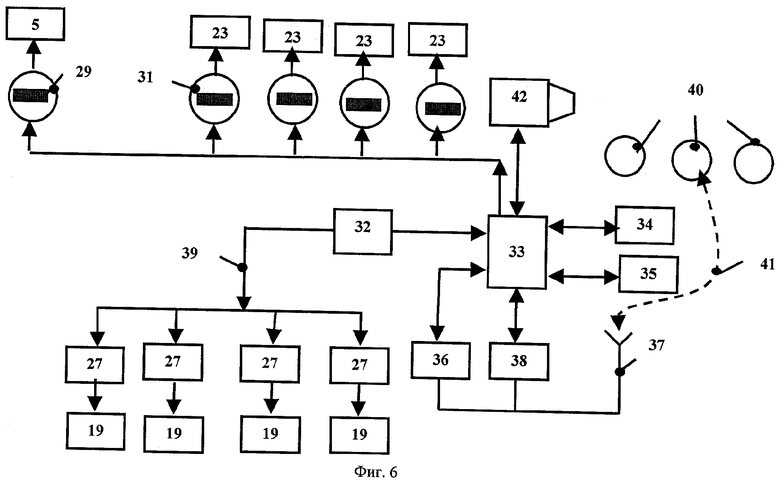
на фиг.6 приведена схема управляемого (бесконтактного) подрыва взрывного устройства авиационной торпеды.
Торпеда авиационная (фиг.1) содержит осесимметричный корпус 1, содержащий цилиндрическую и коническую части. Внутри корпуса 1 установлены взрывное устройство 2 и топливный бак 3 и баллон сжатого воздуха 4. Предпочтительно взрывное устройство 2, топливный бак 3 и баллон сжатого воздуха 4 выполнить тороидальной формы.
Также внутри корпуса 1, вдоль его оси в центральной части установлен газотурбинный двигатель 5, работающий на жидком топливе (возможно применение сверхзвукового газотурбинного двигателя).
Газотурбинный двигатель 5 состоит из воздухозаборника 6 с центральным обтекателем конической формы, компрессора 7, состоящего в свою очередь из статора компрессора 8 и ротора компрессора 9, камеры сгорания 10, с форсунками 11, к которым подключен топливопровод 12 с топливным насосом 13, имеющим привод насоса 14. За камерой сгорания 10 установлена турбина 15, содержащая сопловой аппарат 16 и рабочее колесо турбины 17. На выходе турбины 15 установлено реактивное сопло 18. По периферии установлены четыре управляющих сопла 19. На валу 20 установлены все узлы ротора, а именно ротор компрессора 9 и рабочее колесо турбины 17 и главная пневматическая турбина 21. Все остальные узлы газотурбинного двигателя 4 образуют статор двигателя 22, в который входят сверхзвуковой воздухозаборник 6, статор компрессора 8, камера сгорания 10 и сверхзвуковое реактивное сопло 18. На торце торпеды установлены четыре управляющих винтовых двигателя 23, к которым через валы 24 подсоединены пневматические турбины 25. К пневматическим турбинам 25 подсоединены воздуховоды 26, в которых установлены регуляторы 27, эти воздуховоды подстыкованы к воздушному баллону 4. К воздушному баллону 4 подсоединен и главный воздуховод 28 с главным регулятором 29, другой конец главного воздуховода 28 подсоединен к главной пневматический турбине 21. К управляющим пневматическим турбинам 25 подсоединены газоводы 30 с регуляторами расхода газа 31, при этом другие концы газоводов 30 подсоединены к полости «А» перед сверхзвуковым реактивным соплом 18.
Система управления содержит регуляторы 27, главный регулятор 28, и регуляторы расхода газа 31, к которым подключен контроллер управления 32, который подключен к бортовому компьютеру 33. Контроллер управления 32 также соединен с приводом насоса 14 (фиг.3).
Система управления содержит акселерометр 34 и магнетометр 35 для измерения углов ориентации снаряда в полете, которые соединены с бортовым компьютером 33. К бортовому компьютеру 33 может быть подсоединено приемно-передающее устройство 36 (фиг.4), к которому подсоединена антенна 37. Антенна 37 имеет кольцевую форму, а участок корпуса 1 в районе расположения антенны 37 выполнен радиопрозрачным.
Внутри корпуса 1 (фиг.5) может быть установлено приемное устройство системы глобального позиционирования 38, который также подключен к бортовому компьютеру 33 и к антенне 37. Все соединения выполнены проводными связями 39. В глобальную систему позиционирования (Глонас или GPS) входят спутники 40, связанные с антенной по радиоканалам 41.
Возможна установка во вращающейся части корпуса 1 видеокамеры 42, которая соединена с бортовым компьютером 25 (фиг.6).
Возможно применение схемы (фиг.1) подрыва с контроллером подрыва 35, подключенным к бортовому компьютеру 25 и к взрывному устройству 4.
Торпеда может быть оборудован стабилизаторами 44, закрепленными на внешней стороне корпуса 1 в его нижней части (фиг.1).
1-й вариант управления (автономное наведение)
При применении торпеды авиационной в автономном режиме в оперативную память бортового компьютера 33 вводят исходные данные полета. Авиационная торпеда сбрасывается с борта самолета-топедоносца, потом запускают газотурбинный двигатель 5, при этом бортовой компьютер 33 подает команду на контроллер управления 32 далее на привод насоса 14 и на топливный насос 13 и на регуляторы 27, 28 и 31. Топливо подается из топливного бака 4 в камеру сгорания 10 через форсунки 11, где воспламеняется при помощи электрозапальника (на фиг.1...6 не показан). Продукты сгорания приводят в действие рабочее колесо турбины 17, которое раскручивает через вал 20 ротор компрессора 9.
Применение жидкого топлива, а также кислорода атмосферного воздуха позволяет получить преимущество в дальности полета по сравнению с твердотопливными реактивными снарядами, т.к. теплотворная способность жидкого топлива больше, чем у твердого в 3...4 раза, а окислитель в форме кислорода воздуха берется из атмосферы. Контроль положения осуществляют акселерометр 34 и магнетометр 25. После подлета к цели на расстояние 300...500 м на торпеде авиационной бортовой компьютер 33 выключает газотурбинный двигатель 5. Потом торпеда авиационная погружается под воду и включается главная пневматическая турбина 21 и газотурбинный двигатель 5 переходит в режим работы винтового гидравлического двигателя. Переход на этот режим осуществляется за счет того, что ротор компрессора 7 и рабочее колесо турбины 17 начинают работать в режиме гидравлических винтов, прокачивая через себя воду. Потом включаются пневматические турбины 25 и четыре управляющих винтовых двигателя 23. Управление по курсу и дифференту осуществляется за счет рассогласования работы управляющих винтовых двигателей 23.
2-й вариант управления. Управление по радио.
Управляющий сигнал подается с компьютера самолета торпедоносца (на фиг.1...6 не показано) по радиоканалу 41 на антенну 37 и далее на приемно-передающее устройство 36 и на бортовой компьютер 33.
3-й вариант управления. Управление с применением системы глобального позиционирования
При полете приемник системы глобального позиционирования 38 (системы ГЛОНАС или GPS) принимает сигнал с трех спутников 46 системы по радиоканалам 41 и определяет собственные координаты. Используя заложенную программу посредством воздействия бортового компьютера 33 привод насоса 14, и далее на топливный насос 13 можно уменьшить или увеличить тягу газотурбинного двигателя 5, и тем самым изменить траекторию полета авиационной торпеды. Для управления в полете команды подается на регуляторы расхода газа 31, а при движении под водой на главный регулятор 29 и на регуляторы 27.
По команде с бортового компьютера 25, переданной на контроллер подрыва 35 (фиг.1), взрывное устройство 2 может быть взорвано, например в полете.
Управление снарядом по углам тангажа, рыскания и крена в полете осуществляется согласно фиг.1 посредством включения управляющих сопел 19 открытием соответствующего регулятора расхода газа 31. Исходные данные об угловой ориентации торпеды авиационный постоянно контролируют акселерометр 34 и магнетометр 35. Магнетометр 35 определяет азимут движения авиационной торпеды, а акселерометр 34 его отклонение от направления вектора тяжести.
Применение изобретения позволило:
- повысить скорость подлета авиационной торпеды к цели до сверхзвуковой за счет применения газотурбинного двигателя,
- повысить скорость движения торпеды авиационной под водой за счет работы газотурбинного двигателя в режиме винтового гидравлического двигателя,
- повысить точность попадания до 2...5 м при сбрасывании торпеды на расстоянии до 100 км от цели и с высоты более 20 км,
- обеспечить хорошую стабилизацию снаряда в полете и под водой,
- уменьшить нагрузки на приборы и датчики системы управления торпеды за счет их размещения в корпус снаряда,
- стабилизировать положение снаряда в полете,
- улучшить и упростить управляемость торпедой в полете, особенно на заключительном этапе полета и движения под водой.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННАЯ ТОРПЕДА | 2007 |
|
RU2348003C1 |
| АВИАЦИОННАЯ ТОРПЕДА | 2007 |
|
RU2345317C1 |
| АВИАЦИОННАЯ БОМБА | 2007 |
|
RU2345318C1 |
| АВИАЦИОННАЯ БОМБА С БИРОТАТИВНЫМ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2347179C1 |
| АВИАЦИОННАЯ БОМБА | 2007 |
|
RU2347178C1 |
| ТОРПЕДА | 2014 |
|
RU2571664C1 |
| КРЫЛАТАЯ РАКЕТА | 2007 |
|
RU2351888C1 |
| АТОМНАЯ БОМБА | 2011 |
|
RU2480706C2 |
| ТОРПЕДА УНИВЕРСАЛЬНАЯ | 2012 |
|
RU2477448C1 |
| ВОДОРОДНАЯ БОМБА | 2011 |
|
RU2477449C1 |
Изобретение относится к боевой технике и предназначено для торпедной атаки надводных целей. Технический результат - повышение скорости полета авиационной торпеды и точности попадания при сбрасывании на большом расстоянии от цели. Торпеда содержит корпус осесимметричной формы, внутри которого установлено взрывное устройство, баллон со сжатым воздухом, винтовой гидравлический двигатель с пневматической турбиной и система управления. Внутри корпуса установлены также топливный бак, газотурбинный двигатель, работающий на жидком топливе, содержащий воздухозаборник, компрессор, камеру сгорания и турбину. Топливный бак соединен с газотурбинным двигателем топливопроводом, в котором установлен топливный насос с приводом насоса. К ротору газотурбинного двигателя подсоединена воздушная турбина для использования газотурбинного двигателя в качестве винтового гидравлического при движении торпеды под водой. На заднем торце корпуса установлены соосно с газотурбинным двигателем четыре управляющих винтовых гидравлических двигателя с пневматическими турбинами, а на боковой поверхности корпуса в его задней части установлены радиально четыре рулевых реактивных сопла. Система управления содержит бортовой компьютер, соединенный с контроллером управления. Контроллер управления соединен с регуляторами. 5 з.п. ф-лы, 6 ил.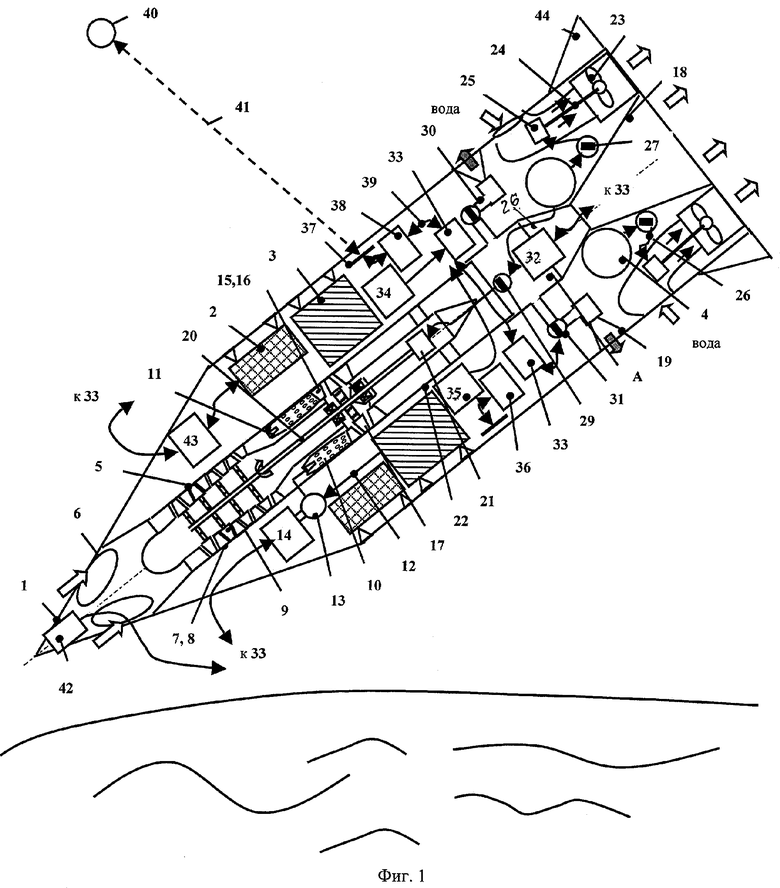
| US 3636877 А, 25.01.1972 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Полуфабрикат рубленый в оболочке | 2019 |
|
RU2711787C1 |
| УСТРОЙСТВО для СЧИТЫВАНИЯ ИНФОРМАЦИИ с МАГНИТНОГО РЕГИСТРАТОРА | 0 |
|
SU257163A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЛАНТАНОИДНОЙ СОЛИ ДИ-(2-ЭТИЛГЕКСИЛ)ФОСФОРНОЙ КИСЛОТЫ | 2013 |
|
RU2534012C1 |

