Область техники, к которой относится изобретение
Настоящее изобретение относится в общем к выравниванию в системах связи и, конкретнее, к адаптивному эквалайзеру для использования с системами беспроводной связи.
Уровень техники
Системы связи используются для передачи информации от одного устройства к другому. До передачи информация кодируется в формат, пригодный для передачи по каналу связи. Передаваемый сигнал искажается, пока он передается через канал связи; сигнал также испытывает ухудшение из-за шума и интерференции, приобретаемой в течение передачи.
Одним из эффектов, который создает искажение сигнала, является многолучевое распространение. Многолучевые сигналы имеют различные версии одного и того же беспроводного сигнала, которые создаются отражениями от строений и естественных образований. Многолучевые сигналы могут иметь фазовые сдвиги, которые вызывают гашения друг друга сигналами из некоторых местоположений. Потеря сигнала из-за фазового гашения многолучевых сигналов известна как замирание. Замирание является проблемой в беспроводных системах, поскольку оно разрушает пользовательские связи. Например, несколько многолучевых копий единственного беспроводного сигнала, передаваемого устройством беспроводной связи, могут создаваться отражениями от деревьев и строений. Эти многолучевые копии могут объединяться и разрушать друг друга из-за фазового смещения.
Другой проблемой, которая может воздействовать на сигнал, является недостаточное отношение сигнал-шум. Отношение сигнал-шум (С/Ш) («SNR») представляет мощность сигнала по отношению к окружающему шуму. Достаточное С/Ш необходимо поддерживать так, чтобы сигнал мог быть выделен из шума.
Пример интерференции, обычно встречаемой в ограниченных по полосе частот каналах, называется межсимвольной интерференцией (МСИ) (ISI). МСИ происходит как результат расширения передаваемого символьного импульса из-за дисперсионной природы канала, что приводит к перекрытию смежных символьных импульсов. Дисперсионная природа канала является следствием многолучевого распространения. Принимаемый сигнал декодируется и переводится в первоначальную форму до кодирования. И приемник и передатчик проектируются для минимизирования эффектов канальных дефектов и интерференции.
Для компенсации шума и интерференции, получаемой передатчиком и каналом, могут быть воплощены различные конструкции приемников. В качестве примера, эквалайзер является общим выбором для обращения с многолучевостью, МСИ и для улучшения С/Ш. Эквалайзер корректирует искажения и генерирует оценку передаваемого символа. В беспроводной среде эквалайзеры требуются для управления изменяемыми во времени состояниями канала. В идеале, отклик эквалайзера регулируется в соответствии с изменениями в характеристиках канала. Способность эквалайзера отвечать на изменения состояний относится к адаптационным способностям эквалайзера. Оптимизация эквалайзера сложна, поскольку это требует уравновешивания конкурирующих целей.
Поэтому существует необходимость в создании эквалайзера, который оптимизирует работу для различных систем и состояний.
Краткое описание чертежей
Фиг.1 является диаграммой системы связи с расширенным спектром, которая поддерживает нескольких пользователей;
Фиг.2 является блок-схемой базовой станции и мобильной станции в системе связи;
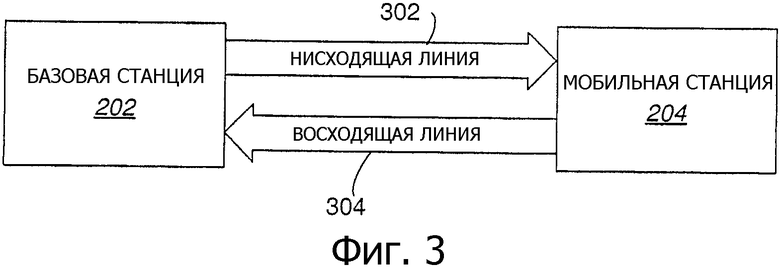
Фиг.3 является блок-схемой, показывающей нисходящую линию и восходящую линию между базовой станцией и мобильной станцией;
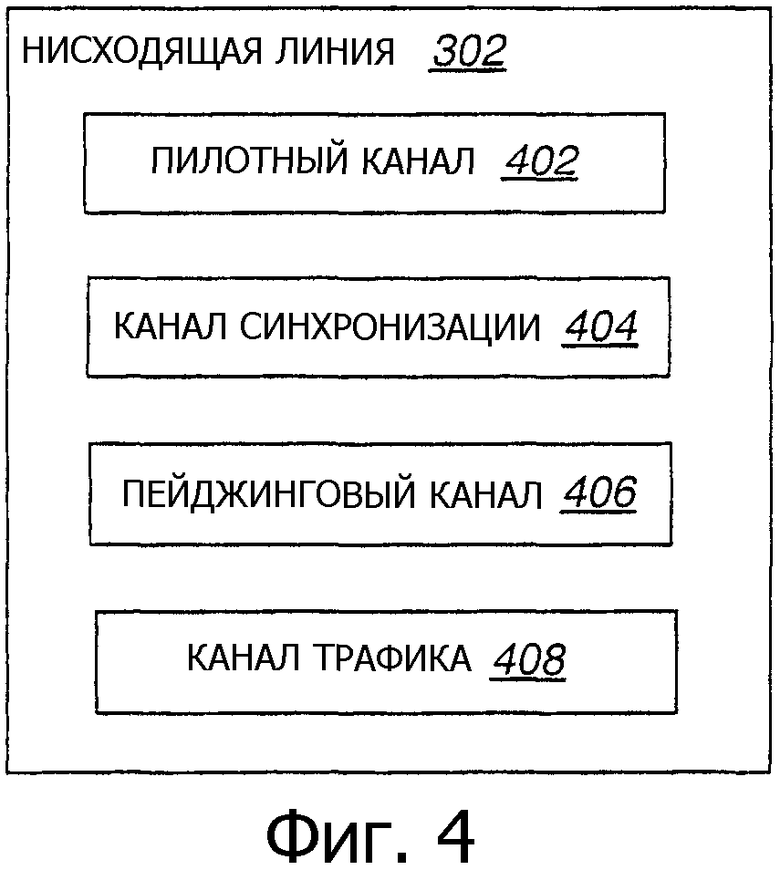
Фиг.4 является блок-схемой каналов в варианте осуществления нисходящей линии;
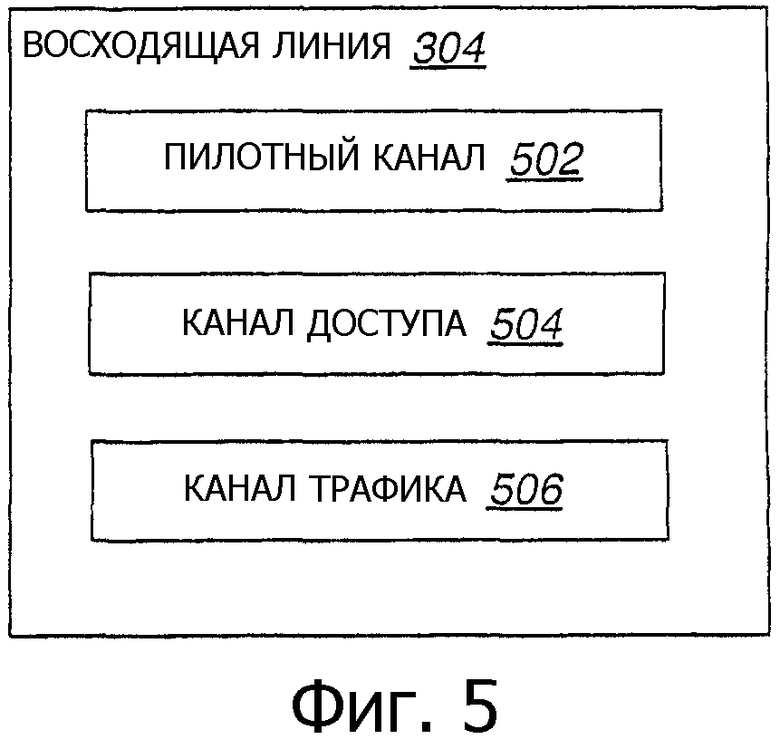
Фиг.5 является блок-схемой каналов в варианте осуществления восходящей линии;
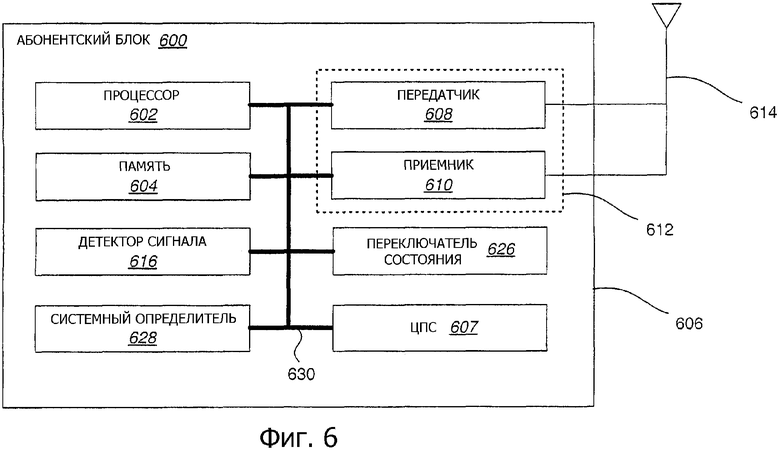
Фиг.6 является блок-схемой варианта осуществления абонентского блока;
Фиг.7 является функциональной блок-схемой, показывающей передачу беспроводного сигнала;
Фиг.8 является функциональной блок-схемой, показывающей прием беспроводного сигнала;
Фиг.9 является функциональной блок-схемой варианта осуществления адаптационной компоненты эквалайзера;
Фиг.10 является блок-схемой, показывающей выполнение фильтра КИХ (с конечной импульсной характеристикой) (FIR).
Фиг.11 является блок-схемой алгоритма, показывающей способ для использования адаптивного эквалайзера, когда принимается беспроводной сигнал мобильной станцией; и
Фиг.12 является блок-схемой алгоритма способа для вычисления новых весов эквалайзера.
Осуществление изобретения
В системе беспроводной связи раскрывается способ оценки передаваемого сигнала. Принимается беспроводной сигнал, который включает в себя пилотный канал и по меньшей мере один другой канал. Принимаемый сигнал оценивается с помощью эквалайзера и принимаемого беспроводного сигнала. Выходы фильтра эквалайзера настраиваются через использование канальной оценки. Канальная оценка вычисляется из пилотного канала. Пилотный канал и по меньшей мере один другой канал разделяются.
Эквалайзер включает в себя множество отводов. В некоторых вариантах осуществления адаптация отводов включает в себя вычисление новых весов эквалайзера, которые соответствуют отводам. Канальная оценка используется в течение адаптации отводов. Канальная оценка вычисляется из пилотного канала, которая включает в себя по меньшей мере один другой канал. Шумовая оценка может быть также использована в течение адаптации отводов. Шумовая оценка также вычисляется из пилотного канала. В некоторых вариантах осуществления принимаемый сигнал включает в себя множество многолучевых сигналов, а канальная оценка и шумовая оценка вычисляются из пилотных символов, получаемых по меньшей мере из некоторых многолучевых сигналов.
Способ может быть воплощен в разнообразных связных приемниках. Например, способ может быть воплощен в мобильной станции. Способ может быть также воплощен базовой станцией.
Цифровой фильтр может быть использован для осуществления эквалайзера. Один возможный цифровой фильтр может быть использован как фильтр КИХ (с конечной импульсной характеристикой) (FIR). Может быть также использован БИХ фильтр (с бесконечной импульсной характеристикой) (IIR). Дополнительно фильтрация может выполняться в частотной области.
В некоторых вариантах осуществления отводы могут быть настроены один раз на каждый интервал пилотного символа. Отводы могут быть настроены на N временных интервалов на каждый интервал пилотного символа, где N является любым положительным целым. В других вариантах осуществления отводы могут быть настроены на каждый Nый интервал пилотного символа, где N является любым положительным целым.
Раскрывается также мобильная станция для использования в системе беспроводной связи. Мобильная станция включает в себя адаптивный эквалайзер для оценки передаваемого сигнала. Мобильная станция включает в себя по меньшей мере одну антенну для приема беспроводного сигнала и приемник в электрической связи по меньшей мере с одной антенной. Эквалайзер оценивает передаваемый сигнал. Эквалайзер включает в себя множество отводов. Канальная оценка используется в течение настройки отводов. Канальная оценка вычисляется из пилотного канала, который был включен по меньшей мере в один другой канал. Мобильная станция также включает в себя компоненту для разделения пилотного канала и по меньшей мере одного другого канала.
Компоненты мобильной станции также применимы и могут использоваться с другими приемными системами. В общем также раскрывается устройство для использования в системе беспроводной связи, которая включает в себя адаптивный эквалайзер для оценки передаваемого сигнала. Это устройство может быть воплощено в мобильной станции, в базовой станции или в любой другой системе, которой нужно принимать и обрабатывать беспроводный сигнал.
Системы и способы, описанные здесь, могут использоваться для компенсации многолучевого распространения. Многолучевые сигналы представляют собой различные версии одного и того же беспроводного сигнала, которые создаются отражениями от строений и естественных образований. Многолучевые сигналы могут иметь фазовые сдвиги, которые вызывают погашения друг друга сигналами из некоторых местоположений. Потеря сигнала из-за фазового гашения многолучевых сигналов известна как замирание. Замирание является проблемой в беспроводных системах, поскольку оно разрушает пользовательские связи. Например, несколько многолучевых копий единственного беспроводного сигнала, передаваемые устройством беспроводной связи, могут создаваться отражением от деревьев и строений. Эти многолучевые копии могут объединяться или разрушать друг друга из-за фазового смещения.
Раскрытые здесь системы и способы могут также быть полезны в оптимизации мощности, используемой в системе связи. Системы МДКР извлекают пользу от использования управления мощностью. Достаточное С/Ш должно поддерживаться так, чтобы сигнал мог быть отделен от шума. Поскольку сигналы МДКР не разделяются по частоте или времени для данной линии связи, шумовая компонента отношения включает в себя все другие принимаемые сигналы МДКР. Если мощность отдельного сигнала МДКР является слишком высокой, он эффективно заглушает все другие сигналы МДКР. Управление мощностью используется в восходящем канале (передача от терминала к базовой станции) и в нисходящем канале (передача от базовой станции к терминалу). В восходящем канале управление мощностью используется для поддержания соответствующего уровня мощности для всех пользовательских сигналов, принимаемых базовой станцией. Уровень мощности этих принимаемых сигналов МДКР должен быть минимизирован, но все же должен быть достаточно мощным для поддержания соответствующего С/Ш. В нисходящем канале управление мощностью используется для поддержания соответствующего уровня мощности для всех сигналов, принимаемых различными терминалами. Это минимизирует интерференцию между пользователями в одной и той же ячейке из-за многолучевых сигналов. Это также минимизирует интерференцию между пользователями в смежных ячейках. Системы МДКР динамически управляют мощностью передачи базовой станции, а терминалы поддерживают соответствующий уровень мощности в восходящем канале и нисходящем канале. Динамическое управление применяется через способы управления без обратной связи и с обратной связью, которые известны в промышленности.
Дальность действия системы МДКР непосредственно относится к общему уровню мощности принимаемых сигналов, поскольку каждый дополнительный сигнал добавляет шум ко всем другим сигналам. Пользовательская шумовая компонента С/Ш уменьшается, когда уменьшается средний принимаемый уровень мощности. Методы, которые уменьшают мощность сигнала МДКР в устройстве связи, непосредственно увеличивают дальность действия системы МДКР. Разнесение приема является одним способом для минимизации требуемой мощности сигнала. Более низкая мощность сигнала также уменьшает стоимость пользовательских устройств связи при увеличении срока службы аккумулятора, а также дальности действия. Оптимизация используемой мощности может иметь дополнительные преимущества в системах с высокой скоростью передачи данных, когда могут поддерживаться только высокие скорости передачи данных, если может быть достигнуто соответствующее С/Ш.
Для передачи информации от одного устройства другому используются системы связи. До передачи информация кодируется в формат, пригодный для передачи по каналу связи. Канал связи может быть линией передачи или свободным пространством между передатчиком и приемником. Поскольку сигнал распространяется по каналу, передаваемый сигнал искажается из-за дефектов канала. Более того, сигнал испытывает деградацию из-за шума и интерференции, приобретаемой в течение передачи. Примером интерференции, обычно встречающейся в каналах с ограниченной полосой частот, является межсимвольная интерференция (МСИ) (ISI). МСИ происходит как результат расширения передаваемого символьного импульса из-за дисперсионной природы канала, что приводит к перекрытию смежных символьных импульсов. Дисперсионная природа канала является следствием многолучевого распространения. В приемнике сигнал обрабатывается и переводится в первоначальную форму до кодирования. И приемник и передатчик спроектированы для минимизирования эффектов канальных дефектов и интерференции.
Разнообразные конструкции приемников могут быть воплощены для компенсации интерференции и шума, вызываемых передатчиком и каналом. В этом примере эквалайзер является общим выбором для рассмотрения этих проблем. Эквалайзер может быть воплощен с помощью трансверсального фильтра, то есть линии задержки с Т-секундными отводами (где Т является временным разрешением фильтра эквалайзера). Содержимое отводов взвешивается и суммируется для образования оценки передаваемого символа. Коэффициенты отводов регулируются для компенсации изменений в радиоканале. Сигналы связываются с канальным разделительным устройством, таким как дескремблер/сжиматель, и с устройством создания решения, такого как декодер или разделитель на символы.
Способность приемника обнаруживать сигнал в присутствии шума основывается на отношении мощности принимаемого сигнала и мощности шума, обычно известным как С/Ш или отношение несущая/интерференция (Н/И). Промышленное использование этих терминов или подобных терминов часто взаимозаменяемо, однако означают они одно и тоже. Соответственно, любая ссылка здесь для Н/И будет понятна специалисту для осуществления широкого представления изменения эффектов шума в различных точках в системе связи.
Эквалайзеры в системах беспроводной связи проектируются для регулировки изменяемых во времени состояний канала. По мере изменения канальных характеристик эквалайзер соответственно регулирует свой ответ. Такие изменения могут включать в себя изменения в носителе распространения или относительное передвижение передатчика и приемника, а также другие состояния. Эквалайзеры, которые адаптированы к изменяемым во времени состояниям канала, обычно относятся к адаптивным эквалайзерам.
Слово «примерное» используется здесь исключительно для обозначения «служащее в качестве примера, варианта или иллюстрации». Любой вариант осуществления, описанный здесь как «примерный», не следует обязательно толковать как предпочтительный или преимущественный по отношению к другим вариантам осуществления. Хотя различные аспекты вариантов осуществления представлены на чертежах, эти чертежи не являются необходимыми изображениями для сопоставления, за исключением специально отображенных.
Последующее обсуждение развивает примерные варианты осуществления приемника связи с адаптивным эквалайзером путем обсуждения сначала системы беспроводной связи с расширенным спектром. Затем обсуждаются базовая станция и мобильная станция, а также связь между ними. Затем показаны компоненты варианта осуществления абонентского блока. Функциональные блок-схемы показаны и описаны в отношении к передаче и приему беспроводного сигнала. Излагаются также подробности, касающиеся адаптации эквалайзера в приемной системе. В описание включены также иллюстрации и математические выводы в отношении обработки сигнала. Затем обсуждаются примерные способы использования и адаптации эквалайзера.
Заметим, что примерный вариант осуществления обеспечивается в качестве примерного во всем этом обсуждении; однако альтернативные варианты осуществления могут включать в себя различные аспекты без выхода за объем настоящего изобретения. В частности, настоящее изобретение применимо к системе обработки данных, системе беспроводной связи, мобильной сети ИП (IP) (Интернет протокола) и любой другой системе, требующей приема и обработки беспроводного сигнала.
Примерный вариант осуществления использует систему беспроводной связи с расширенным спектром. Системы беспроводной связи широко применяются для обеспечения различных видов связи, таких как речевая передача, передача данных и так далее. Эти системы могут основываться на множественном доступе с кодовым разделением каналов (МДКР) (CDMA), множественном доступе с временным разделением каналов (МДВР) (TDMA) или некоторых других методах модуляции. Система МДКР обеспечивает определенные преимущества перед другими типами систем, в том числе с увеличенной пропускной способностью.
Система может быть создана для поддержки одного или нескольких стандартов, таких как «Стандарт совместимости мобильной станции - базовой станции TIA/EIA/IS-95-B для двухрежимной широкополосной сотовой системы с расширенным спектром», именуемый здесь как стандарт IS-95, стандарт, предложенный консорциумом, называемым «3rd Generation Partnership Project» («Проект сотрудничества третьего поколения»), именуемый здесь как 3GPP и воплощенный в наборе документов, включающем в себя документы №№ 3GPP TS 25.211, 3GPP TS 25.212, 3GPP TS 25.213, 3GPP TS 25.214 и 3GPP TS 25.302, называемый здесь как стандарт Ш-МДКР (Широкополосный МДКР) (W-CDMA), стандарт, предложенный консорциумом, называемым «3rd Generation Partnership Project 2» («Проект-2 сотрудничества третьего поколения»), именуемый здесь как 3GPP2, и стандарт TR-45.5, именуемый здесь как стандарт cdma2000, ранее называвшийся IS-2000 MC. Стандарты, процитированные выше, являются таким образом намеренно введенными сюда посредством ссылки.
Каждый стандарт конкретно определяет обработку данных для передачи от базовой станции к мобильной станции и наоборот. В качестве примерного варианта осуществления дальнейшее обсуждение рассматривает систему связи с расширенным спектром, совместимую с протоколами стандарта cdma2000. Альтернативные варианты осуществления могут включать в себя другой стандарт.
Системы и способы, описанные здесь, могут быть использованы в системах связи с высокой скоростью передачи данных. Далее по всему обсуждению описывается для ясности конкретная система с высокой скоростью передачи данных. Могут быть осуществлены и альтернативные системы, которые обеспечивают передачу информации на высоких скоростях передачи данных. Для систем связи МДКР, созданных для передачи на высоких скоростях передачи данных, таких как система связи высокой скорости передачи данных (ВСП) (HDR), для передачи на максимальной скорости передачи данных может быть использована схема запроса переменной скорости передачи данных, которая может поддерживать Н/И. Система связи ВСП обычно создается для согласования с одним или несколькими стандартами, такими как «cdma2000 High Rate Packet Data Air Interface Specification», 3GPP2 C.S0024, версии 2, 27 октября 2000, распространяемой консорциумом «3rd Generation Partnership Project 2». Содержание вышеупомянутого стандарта включено сюда посредством ссылки.
Приемник в примерной системе связи ВСП может использовать схему запроса переменной скорости передачи данных. Приемник может быть реализован на абонентской станции, связанной с наземной сетью передачи данных путем передачи данных по восходящей линии к базовой станции (показано ниже). Базовая станция принимает эти данные и передает данные через контроллер базовой станции (КБС) (BSC) (не показан) к наземной сети. Наоборот, передачи к абонентской станции могут проходить из наземной сети к базовой станции через КБС и передаваться из базовой станции абонентскому блоку по нисходящей линии.
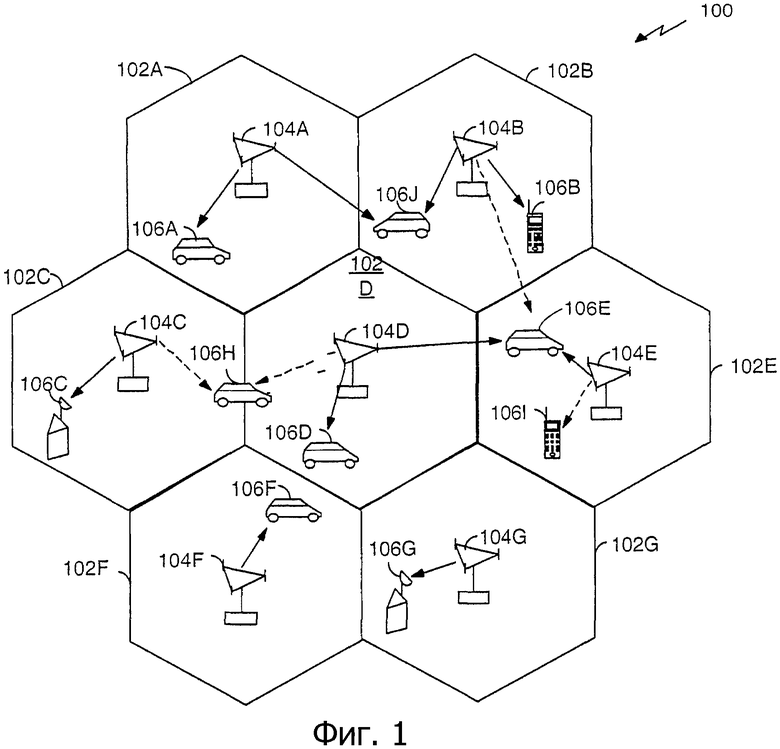
Фиг.1 служит примером системы 100 связи, которая поддерживает некоторое количество пользователей и способна воплощать по меньшей мере некоторые аспекты вариантов осуществления, описанных здесь. Любые виды алгоритмов и способов могут быть использованы для планирования передач в системе 100. Система 100 обеспечивает связь для нескольких ячеек 102А-102G, каждая из которых обслуживается соответствующей базовой станцией 104А-104G соответственно. В примерном варианте осуществления некоторые базовые станции 104 имеют множество приемных антенн, а другие имеют только одну приемную антенну. Подобным образом некоторые базовые станции 104 имеют множество передающих антенн, а другие имеют единственную передающую антенну. Не существует ограничений на комбинации передающих антенн и приемных антенн. Поэтому базовая станция 104 может иметь множество передающих антенн и единственную приемную антенну, или иметь множество приемных антенн и единственную передающую антенну, или иметь единственную передающую и приемную антенны или множество передающих и приемных антенн.
Терминалы 106 в области покрытия могут быть неподвижные (то есть стационарные) или подвижные. Как показано на Фиг.1, различные терминалы 106 распределяются по всей системе. Каждый терминал 106 связывается по меньшей мере с одной («Проект сотрудничества третьего поколения»), а возможно - со множеством базовых станций 104 по нисходящей линии и восходящей линии в данный момент в зависимости от того, например, используется ли мягкая передача управления, либо терминал предназначен и работает для (одновременного или последовательного) приема множества передач от множества базовых станций. Мягкая передача управления в системах связи МДКР хорошо известна в уровне техники и подробно описывается в патенте США № 5101501, озаглавленном «Способ и система для обеспечения мягкой передачи управления в сотовой телефонной системе МДКР», права на который принадлежат заявителю по настоящему изобретению.
Нисходящая линия относится к передаче от базовой станции 104 к терминалу 106, а восходящая линия относится к передаче от терминала 106 к базовой станции 104. В примерном варианте осуществления некоторые терминалы 106 имеют множество приемных антенн, а другие имеют только одну приемную антенну. На Фиг.1 базовая станция 104А передает данные терминалам 106А и 106J по нисходящей линии, базовая станция 104В передает данные терминалам 106В и 106J, базовая станция 104С передает данные терминалу 106С и так далее.
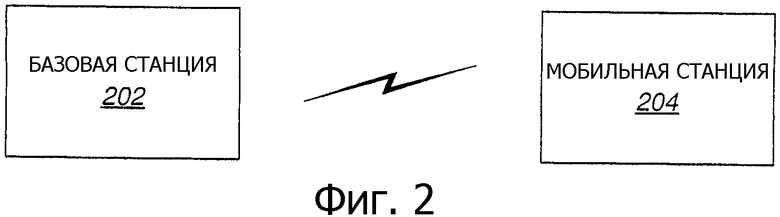
Фиг.2 является блок-схемой базовой станции 202 и мобильной станции 204 в системе 100 связи. Базовая станция 202 имеет беспроводную связь с мобильной станцией 204. Как описывается выше, базовая станция 202 передает сигналы к мобильным станциям 204, которые принимают эти сигналы. В дополнение к этому мобильные станции 204 могут также передавать сигналы к базовой станции 202.
Фиг.3 является блок-схемой базовой станции 202 и мобильной станции 204, показывающей нисходящую линию 302 и восходящую линию 304. Нисходящая линия 302 относится к передаче от базовой станции 202 к мобильной станции, а восходящая линия 304 относится к передаче от мобильной станции 204 к базовой станции 202.
Фиг.4 является блок-схемой каналов в варианте осуществления нисходящей линии 302. Нисходящая линия 302 включает в себя пилотный канал 402, канал 404 синхронизации, пейджинговый канал 406 и канал 408 трафика. Показанная нисходящая линия 302 является только одним возможным вариантом осуществления нисходящей линии 302, и нужно понимать, что другие каналы могут добавляться или удаляться из нисходящей линии 302.
По одному стандарту МДКР, описанному в стандарте совместимости, мобильная станция - базовая станция для двухрежимной широкополосной сотовой системы с расширенным спектром TIA/EIA/IS-95-A Ассоциации индустрии телесвязи, каждая базовая станция 202 передает своим пользователям пилотный канал 402, канал 404 синхронизации, пейджинговый канал 406 и прямой канал 408 трафика. Пилотный канал 402 является немодулированным сигналом прямой последовательности с расширенным спектром, передаваемым непрерывно каждой базовой станцией 202. Пилотный канал 402 позволяет каждому пользователю получать тактирование в каналах, передаваемых базовой станцией 202, и обеспечивает эталон для когерентной демодуляции. Пилотный канал 402 также обеспечивает средство для сравнения интенсивности сигнала между базовыми станциями 202 для определения того, когда нужно произвести мягкую передачу управления (такую, как при передвижении между ячейками 102) между базовыми станциями 202.
Канал 404 синхронизации передает информацию тактирования и конфигурации системы мобильной станции 204. Пейджинговый канал 406 используется для связи с мобильными станциями 204, когда они не назначаются каналу 408 трафика. Пейджинговый канал 406 используется для передачи страниц, то есть уведомлений поступающих вызовов, к мобильным станциям 204. Канал 408 трафика используется для передачи пользовательских данных и речи. Сообщения сигнализации также посылаются по каналу 408 трафика.
Фиг.5 является блок-схемой каналов в варианте осуществления восходящей линии 304. Восходящая линия 304 может включать в себя пилотный канал 502, канал 504 доступа и канал 506 трафика. Показанная восходящая линия 304 является только одним возможным вариантом осуществления восходящей линии, и следует понимать, что другие каналы могут быть добавлены или удалены из восходящей линии 304.
Восходящая линия 304 по Фиг.5 включает в себя пилотный канал 502. Предложен повторный вызов этих систем беспроводной радиотелефонной связи третьего поколения (3G), в котором используется восходящая линия 304 пилотного канала 502. Например, в ныне предложенном стандарте cdma2000 мобильная станция 204 передает пилотный канал обратной линии (ПКОЛ) (R-PICH), который базовая станция 202 использует для исходного сбора данных, временного слежения, когерентного восстановления эталона в гребенчатом приемнике и измерений управления мощностью. Таким образом, системы и способы, описанные здесь, применимы для пилотных сигналов и на нисходящей линии 302, и на восходящей линии 304.
Канал 504 доступа используется мобильной станцией 204 для связи с базовой станцией 202, когда мобильная станция не имеет назначенного канала 506 трафика. Канал 506 трафика восходящей линии используется для передачи пользовательских данных и речи. Сообщения сигнализации также посылаются по каналу 506 трафика восходящей линии.
Вариант осуществления мобильной станции 204 показан в системе 600 абонентского блока, проиллюстрированной в виде функциональной блок-схемы на Фиг.6. Система 600 включает в себя процессор 602, который управляет работой системы 600. Процессор 602 может также именоваться как ЦП (центральный процессор) (CPU). Память 604, которая может включать в себя как постоянное запоминающее устройство (ПЗУ) (ROM), так и оперативное запоминающее устройство (ОЗУ) (RAM), обеспечивает процессор 602 командами и данными. Часть памяти 604 может также включать в себя энергонезависимое оперативное запоминающее устройство (ЭНОЗУ) (NVRAM).
Система 600, которая обычно воплощается в беспроводном устройстве связи, таком как сотовый телефон, включает в себя также корпус 606, который содержит передатчик 608 и приемник 610, чтобы обеспечить передачу и прием данных, таких как аудио данные, между системой 600 и удаленным расположением, таким как сотовый контроллер сайта или базовая станция 202. Передатчик 608 и приемник 610 могут быть объединены в приемопередатчик 612. Антенна 614 прикрепляется к корпусу 606 и электрически связывается с приемопередатчиком 612. Могут быть также использованы дополнительные антенны (не показано). Работа передатчика 608, приемника 610 и антенны 614 общеизвестна в уровне техники, и нет необходимости описывать это здесь.
Система 600 также включает в себя детектор 616 сигнала, используемый для обнаружения и определения уровней сигналов, принимаемых приемопередатчиком 612. Детектор 616 сигнала обнаруживает такие сигналы, как полная мощность, отношения энергии пилотного сигнала на псевдошумовой (ПШ) (PN) элементарный интервал, спектральную плотность мощности и другие сигналы, которые известны в уровне техники.
Переключатель 626 состояния системы 600 управляет состоянием устройства беспроводной связи на основании текущего состояния и дополнительных сигналов, принимаемых приемопередатчиком 612 и обнаруженных детектором 616 сигнала. Устройство беспроводной связи способно работать в любом из нескольких состояний.
Система 600 также включает в себя системный определитель 628, используемый для управления устройством беспроводной связи и определения того, к какой системе сервисного провайдера должно передать устройство беспроводной связи, когда оно обнаружит, что текущая система сервисного провайдера не годится.
Различные компоненты системы 600 соединяются вместе системной шиной 630, которая может включать в себя шину питания, сигнальную шину управления и сигнальную шину состояния в дополнение к шине данных. Однако, для ясности, различные шины показываются на Фиг.6 как системная шина 630. Система 600 может также включать в себя цифровой процессор 607 сигналов (ЦПС) (DSP) для использования в обработке сигналов. Специалисту будет понятно, что система 600, показанная на Фиг.6, является функциональной блок-схемой, а не перечнем конкретных компонентов.
Описанные здесь способы для использования адаптивного эквалайзера в связном приемнике могут быть воплощены в варианте осуществления абонентского блока 600. Раскрытые системы и способы могут также быть воплощены в других системах связи с приемником, таким как базовая станция 202. Если базовая станция 202 используется для воплощения раскрытых систем и способов, то функциональная блок-схема на Фиг.6 может быть также использована для описания компонентов в функциональной блок-схеме базовой станции 202.
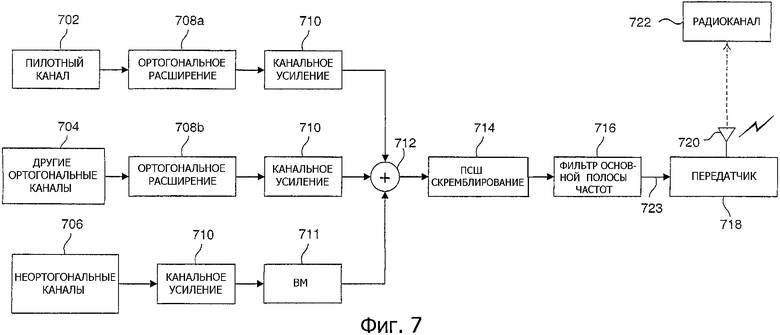
Фиг.7 является функциональной блок-схемой, показывающей передачу беспроводного сигнала. Как показано, беспроводный сигнал включает в себя пилотный канал 702 и другие ортогональные каналы 704. Дополнительные неортогональные каналы 706 могут также быть включены в беспроводный сигнал. Примерные неортогональные каналы включают в себя канал синхронизации (КС) (SCH), каналы, скремблированные вторичным кодом скремблирования (ВКС) (SSC) в ШМДКР, и каналы, расширенные квазиортогональными последовательностями (КОП) (QOS) в cdma2000.
Ортогональные каналы подаются в компонент 708 ортогонального расширения. И ортогональные, и неортогональные каналы затем подаются в компонент 710 канального усиления, который добавляет усиление для канала. Выходные сигналы из компонентов 710 канального усиления суммируются, как показано, сумматором 712. Как показано на Фиг.7, неортогональные каналы могут быть с разделением по времени. В других вариантах осуществления один или несколько ортогональных каналов могут иметь временное мультиплексирование.
Неортогональные каналы 706 не имеют ортогональных расширяемых компонентов. Некоторые неортогональные каналы 706 (например, канал синхронизации) могут подаваться непосредственно в компонент 710 канального усиления. Другие неортогональные каналы 706 (например, каналы, расширенные квазиортогональными последовательностями в cdma2000) расширяются неортогональным образом, а затем подаются в компонент 710 канального усиления. Выходные сигналы компонентов 710 канального усиления суммируются в сумматоре 712.
Просуммированный сигнал подается в компонент 714 скремблирования псевдослучайным шумом (ПСШ) (PN). Фильтр 716 основной полосы частот берет выходной сигнал из компонента 714 скремблирования ПСШ и подает фильтрованный выходной сигнал 723 передатчику 718. Передатчик 718 включает в себя антенну 720. Передаваемый сигнал затем поступает в радиоканал 722.
Функциональная блок-схема на Фиг.7, показывающая передачу беспроводного сигнала, может быть воплощена в различных компонентах. Например, базовая станция 202 воплощает одну форму блок-схемы, показанной на Фиг.7. Дополнительно мобильная станция 204 также реализует форму блок-схемы передачи.
Фиг.8 является функциональной блок-схемой, показывающей прием беспроводного сигнала 801. Приемник 802 принимает беспроводной сигнал 801 через использование антенны 804. Принимаемый сигнал содержит искаженные версии передаваемого пилотного канала и других каналов. Принимаемый сигнал преобразуется на основную полосу частот и подается в согласованный фильтр 806, который согласован с импульсным откликом фильтра основной полосы частот в передатчике. Выходной сигнал 808 согласованного фильтра 806 подается в эквалайзер 810. Выходной сигнал 808 из согласованного фильтра 806 все еще включает в себя все различные каналы, которые передавались.
Эквалайзер 810 должен исправлять искажения, которые происходят во время передачи по радиоканалу 722. Как описывалось ранее, эти искажения могут происходить из-за интерференции, канальных дефектов и так далее. Эквалайзер 810 затем создает оценку переданного сигнала. В одном варианте осуществления эквалайзер 810 включает в себя фильтр, осуществленный через использование нескольких отводов 811 эквалайзера. Отводы могут быть распределены равномерно или неравномерно. В другом варианте осуществления эквалайзер выполняется в частотной области.
Адаптационная компонента 812 эквалайзера позволяет эквалайзеру 810 адаптироваться к изменяемым во времени состояниям канала 722. На Фиг.8 выходной сигнал 808 согласованного фильтра 806 также подается в адаптационную компоненту 812 эквалайзера. Адаптационная компонента 812 эквалайзера адаптирует эквалайзер для компенсации изменений в состояниях канала 722. Обычно, адаптация эквалайзера включает в себя вычисление весов 826 фильтра эквалайзера, которые используются эквалайзером 810. Веса 826 соответствуют отводам 811 эквалайзера.
Преимущественно, адаптационная компонента 812 эквалайзера адаптирует эквалайзер 810, пока приемник 802 принимает беспроводной сигнал, который включает в себя пилотный канал и другие каналы. Таким образом, несмотря на то, что в других системах в настоящее время используется приспособление адаптивных эквалайзеров, основанное на сигналах, которые включают в себя только пилотный канал, системы и способы, описанные здесь, могут подготавливаться и адаптироваться даже тогда, когда пилотный канал одновременно сосуществует с другими каналами. Функциональная блок-схема примерного варианта осуществления адаптационной компоненты 912 эквалайзера показана на Фиг.9 и описывается в связи с ней.
Выход компоненты 812 эквалайзера подается в компоненты 814 дескремблирования ПСШ и 816 сжатия. Каналы 818, включающие в себя пилотный и другие каналы, сжимаются компонентой 816 сжатия и затем подаются для дальнейшей обработки 820.
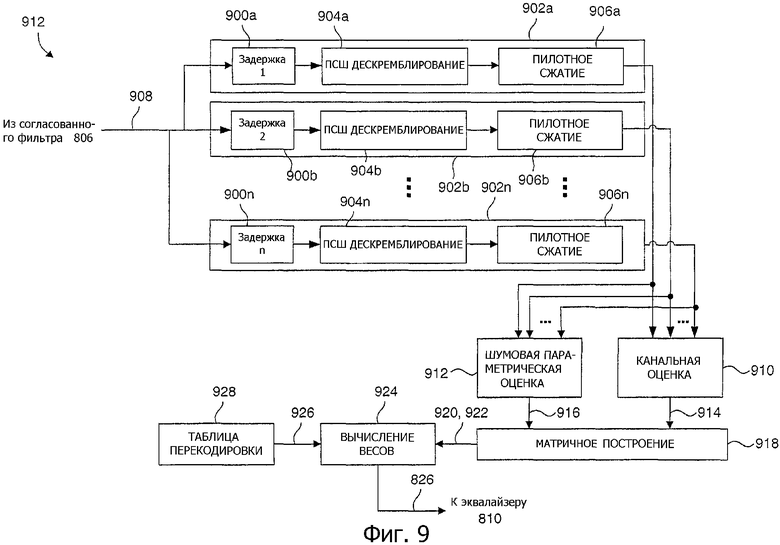
Фиг.9 является функциональной блок-схемой варианта осуществления адаптационной компоненты 912 эквалайзера. Адаптационная компонента 912 эквалайзера включает в себя множество подканалов 902. На Фиг.9 показано N подканалов 902, где N является любым положительным целым.
Как указывалось ранее, выходной сигнал 808 из согласованного фильтра 806 включает в себя все различные каналы, которые передавались. Дополнительно выходной сигнал 808 согласованного фильтра 806 включает в себя множество многолучевых сигналов. Как описывалось ранее, многолучевые сигналы являются различными вариантами одного и того же сигнала, которые создаются отражениями от строений и естественных образований. Многолучевые сигналы сдвигаются по времени друг от друга.
На Фиг.9 выходной сигнал согласованного фильтра 806 подается в каждый подканал 902. Сигнал задерживается на соответствующее значение 900 для каждого подканала 902. Задержанный сигнал затем подается в компоненту 902 дескремблирования ПСШ и в компоненту 906 пилотного дескремблирования в назначенном подканале 902. В одном варианте осуществления компонента 906 пилотного дескремблирования в каждом подканале 902 может быть накапливающей компонентой. Выходной сигнал 908 каждого подканала 902 в адаптационной компоненте 912 эквалайзера включает в себя пилотные символы из отдельного многолучевого сигнала в выходном сигнале 808 согласованного фильтра 806.
Компоненты 906 дескремблирования ПСШ в подканалах 902 могут быть по существу подобны компоненте 814 дескремблирования ПСШ, показанной на Фиг.8. Однако компоненты 906 дескремблирования ПСШ в подканалах 902 сдвигаются по времени компонентой 814 дескремблирования ПСШ, показанной на Фиг.8.
В некоторых вариантах осуществления некоторые многолучевые сигналы в выходном сигнале 808 согласованного фильтра 806 могут не назначаться для подканала 902. Например, число многолучевых сигналов может быть больше, чем число доступных подканалов 902, или многолучевой сигнал может быть слишком слабым, чтобы назначаться для подканала 902.
Выходные сигналы 908 различных подканалов 902 затем подаются в компоненту 910 канальной оценки и в компоненту 912 оценки шумового параметра. Компонента 910 канальной оценки создает канальные оценки 914, а компонента 912 оценки шумового параметра создает оценки 916 параметров шума. Канальные оценки 914 могут включать в себя, например, оценки канальных коэффициентов для каждой из многолучевых компонент. Шумовые параметрические оценки 916 могут включать в себя, например, оценку шумовой ковариационной матрицы.
Канальные оценки 914 и шумовые параметрические оценки 916 затем подаются в компоненту 918 матричного построения. Компонента 918 матричного построения строит матрицу 920 канальных оценок и матрицу 922 шумовых параметрических оценок. Матрица 920 канальных оценок и матрица 922 шумовых параметрических оценок затем подаются в компоненту 924 вычисления весов. Компонента 924 вычисления весов использует матрицу 920 канальных оценок, матрицу 922 шумовых параметрических оценок и известную матрицу 926 из таблицы 928 перекодировки для вычисления весов 826 эквалайзера, который подается в эквалайзер 810. Известная матрица 926 является функцией компоненты 814 дескремблирования ПСШ и компоненты 816 сжатия.
На Фиг.7-9 далее обеспечиваются математическое описание и исходные различные сигналы, формулы и алгоритмы, которые могут быть использованы.
Представление в дискретном времени передискретизированного передаваемого сигнала 723 может быть записано, как показано в уравнении (1).
s = H·P·W·d  (1)
(1)
Значение d в уравнении (1) включает в себя символы из всех каналов и определяется из уравнения (2).
 (2)
(2)
Значение W в уравнении (1) определяется в уравнениях (3)-(5).
 (3)
(3)

 (4)
(4)
 (5)
(5)
Уравнение (4) указывает, что W является комплексной матрицей с N(2K+1) строками и 2K+1 столбцами. Значение w в уравнении (5) является кодом расширения. Примеры кодов расширения включают в себя коды Уолша, коды OVSF и квазиортогональные коды. Значение g в уравнении (5) является значением усиления канала. Значение u в уравнении (5) является пользовательским индексом. Значение N в уравнениях (3)-(5) является длиной кода расширения. Значение i в уравнении (5) является индексом временного интервала в коде расширения. Значение j в уравнении (5) является индексом символа.
Значение Р в уравнении (1) определяется в уравнениях (6)-(7).

 диагональ
диагональ (6)
(6)
 (7)
(7)
Значение pi в уравнении (7) является временным интервалом скремблирования с индексом i.
Значение Н в уравнении (1) определяется в уравнениях (8)-(9).

 (8)
(8)
 (9)
(9)
Значение hi в уравнении (9) является коэффициентом фильтра основной полосы частот с индексом i.
Многолучевой канал 722 имеет импульсный отклик, как определено в уравнении (10).
 (10)
(10)
В уравнении (10) значение αi является комплексным значением усиления канала основной полосы частот.
Принимаемый сигнал 801 может быть записан, как показано в уравнении (11).
r = A·s+v = A·H·P·W·d+v  (11)
(11)
В уравнении (11) значение v является шумовым вектором. Значение А определяется в уравнении (12). В уравнении (12) значение А выражается в значениях усиления канала основной полосы частот.
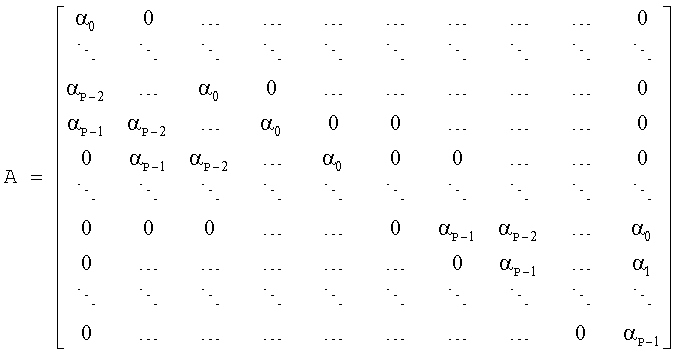 (12)
(12)
Составной сигнал временного интервала может определяться, как показано в уравнении (13).
b = P·W·d  (13)
(13)
Таким образом, значение b в уравнении (13) включает в себя символы (d) из всех каналов, их коды (W) расширения и их коды (Р) скремблирования. Уравнение (11) может поэтому быть переписано, как показано в уравнении (14).
r = A·H·b+v  (14)
(14)
Если эквалайзер 810 работает с уровнем временного интервала, то для того, чтобы оценить сигналы временных интервалов во время 0, ему необходимо только рассмотреть сигналы временного интервала ограниченного диапазона вокруг 0 с индексами временного интервала m, как показано в уравнении (15).
 (15)
(15)
Затем уравнение (11) может быть переписано, как показано в уравнении (16).
rc = Ac·Hc·bc+vc (16)
(16)
Заметим, что rc, Ac, Hc и vc являются подматрицами r, A, H и v соответственно. Значение bc в уравнении (16) определяется в уравнении (17).
bc=[b[-M],b[-M+1],...,b[M]]T (17)
(17)
Значение Hc в уравнении (16) определяется в уравнениях (18)-(19). Значение Hc соответствует известной матрице 928 на Фиг. 9.
 (18)
(18)
 (19)
(19)
Значение Ac в уравнении (16) определяется в уравнении (20). Значение Ас соответствует матрице 920 канальных оценок на Фиг.9.
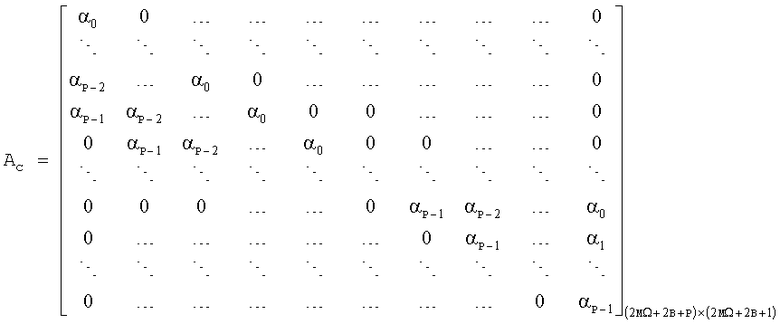 (20)
(20)
Значение rc в уравнении (16) соответствует входному сигналу 808 для эквалайзера 810. Веса 826 эквалайзера могут быть обозначены как w, а выходной сигнал 813 эквалайзера 810 может быть обозначен как y. Выходной сигнал 813 эквалайзера 810 может затем быть записан, как показано в уравнении (21).
y = wH·rc = wH·Ac·Hc·bc+wH·vc(21)
Заметим, что rc тактируется на скорости Ω/Тс, y тактируется на скорости временного интервала, а w обновляется на скорости пилотного символа.
Значение w в уравнении (21) определяется в уравнении (22). Как указывалось ранее, w обозначает веса 826 эквалайзера. Таким образом, уравнение (22) используется компонентой 924 вычисления весов для вычисления весов 826 эквалайзера.
w =(Ac·Hc·Hc H·Ac H+Λ)-1·Ac·Hc·
 (22)
(22)
В уравнении 22 значение Λ является ковариационной матрицей шумового вектора vc. Значение Λ соответствует матрице 922 шумовых параметрических оценок на Фиг.9. Значение Ас соответствует матрице 920 канальных оценок на Фиг.9. Значение берется из уравнения (23)
 (23)
(23)
Описанное выше математическое обсуждение обеспечивается в качестве примера как возможность специалисту создать или использовать настоящее изобретение. Однако специалисту будет понятно, что различные изменения могут быть сделаны для различных сигналов, формул и алгоритмов, описанных выше, без отхода от сущности или объема изобретения.
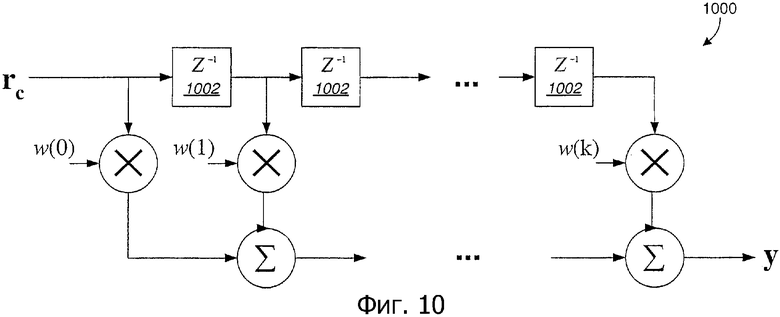
В одном варианте осуществления эквалайзер 810 может быть воплощен фильтром КИХ (с конечной импульсной характеристикой) (FIR). Фиг.10 является блок-схемой, показывающей осуществление фильтра 1000 КИХ. Как описывалось ранее и показано на Фиг.10, rc является входным сигналом 808 для фильтра 1000 КИХ, а y является выходным сигналом фильтра 1000 КИХ. Существуют k весов 826 эквалайзера, показанных в фильтре 1000 КИХ на Фиг.10, причем каждый вес 826 эквалайзера обозначается как w(k).
Другие компоненты могут быть использованы в эквалайзере 810 помимо фильтра КИХ. Например, может быть использован фильтр с бесконечной импульсной характеристикой (БИХ) (IIR). Дополнительно фильтрация может быть воплощена в частотной области.
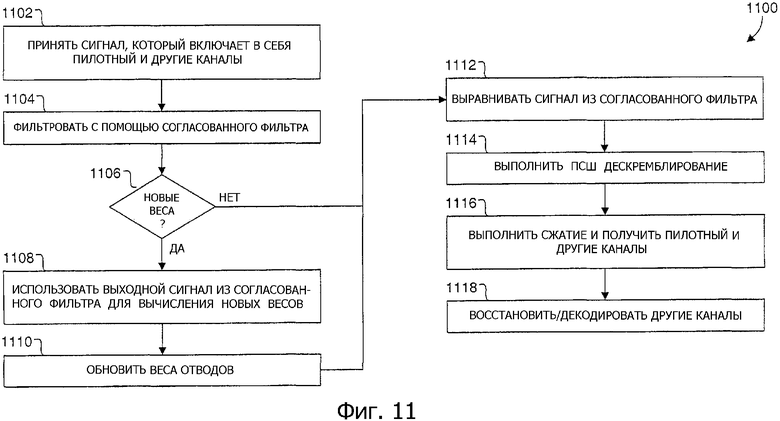
Фиг.11 является блок-схемой способа 1100 для использования адаптивного эквалайзера 810, когда мобильной станцией 204 принимается беспроводной сигнал 801. Способ на Фиг.11 может также быть использован базовой станцией 202 и другими типами приемников в системе 100 беспроводной связи. Принимается 1102 беспроводной сигнал 801, который включает в себя пилотный канал 402 и другие каналы. Пилотный канал 402 и другие каналы могут быть переданы одновременно. В дополнение пилотный канал 402 и другие каналы могут не быть переданы одновременно. В дополнение, если способ 1100 воплощала базовая станция 202, то будет включено меньше каналов. Например, если беспроводной сигнал 801 будет приниматься базовой станцией 202, беспроводной сигнал может включать в себя пилотный 502, доступа 504 и канал трафика 506. Как показано, способ 1100 может быть легко адаптирован для использования в различных приемниках в системах 100 беспроводной связи.
Принимаемый сигнал 801 фильтруется 1104 с помощью согласованного фильтра 806. На выходе согласованного фильтра 806 определяется 1106, должны ли вычисляться новые веса 826 эквалайзера (как описывалось ранее, веса 826 эквалайзера соответствуют отводам 811 эквалайзера). Различные установки могут быть сделаны для осуществления этого определения. Например, способ 1100 может быть сформирован для вычисления новых весов 826 эквалайзера на каждый интервал пилотного символа. В качестве альтернативы способ 1100 может быть сформирован для вычисления новых весов 826 эквалайзера на каждый Nый интервал пилотного символа, где N является любым положительным целым. Значение N может быть статическим или оно может быть динамическим. Способ может быть сформирован для согласования отводов 811 эквалайзера множество раз на каждом интервале пилотного символа. Специалисту будет понятно, что в зависимости от оборудования может быть необходимо вычисление новых весов 826 эквалайзера чаще или реже. Например, в ситуациях небольших скоростей может быть не нужно вычислять новые веса 826 эквалайзера столь же часто, как и в случае, когда система используется в ситуациях с высокой скоростью.
Если определяется 1106, что должны быть вычислены новые веса 826 эквалайзера, то выходной сигнал 808 из согласованного фильтра 806 используется для вычисления новых весов 826 эквалайзера. Блок-схема алгоритма примерного варианта осуществления способа для вычисления 1108 новых весов 826 эквалайзера показана на Фиг.12 и описывается вместе с ней. Как только вычисляются 1108 новые веса, отводы 811 обновляются 1110.
Определяется 1106 ли или нет, что новые веса 826 эквалайзера должны быть вычислены 1108, выходной сигнал 808 согласованного фильтра 806 подается в эквалайзер 810 для компенсации 1112. Как указывалось ранее, эквалайзер 810 исправляет искажения сигнала 801 и создает оценку передаваемого сигнала. Эквалайзер 810 включает в себя фильтр, воплощенный через использование некоторого количества отводов 811, представленных здесь посредством w. Эквалайзер 810 загружает текущие веса отводов 811 для того, чтобы воплотить фильтр. Если отводы 811 фильтра обновляются, то эквалайзер 810 загружает обновленные веса отводов 811. Специалисту будут понятны различные способы, в которых эквалайзер 810 может знать, что новые веса отводов 811 доступны.
Выходной сигнал 813 эквалайзера подается в компоненту 814 дескремблирования ПСШ, где выполняется 1114 дескремблирование. Затем дескремблирование 1116 выполняется для получения пилотного и других каналов. В итоге восстанавливаются/декодируются 1118 другие каналы.
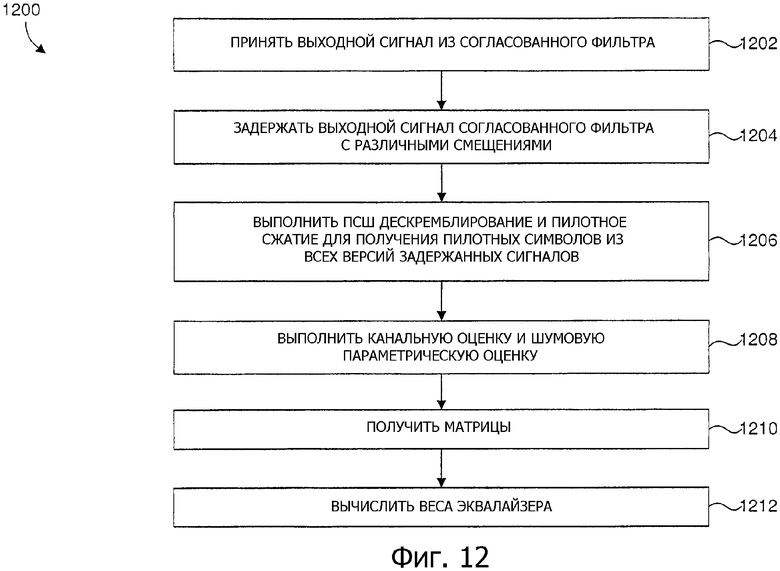
Фиг.12 является блок-схемой способа 1200 для вычисления новых весов 826 эквалайзера. Способ 1200 может быть выполнен адаптационной компонентой 812 эквалайзера. Способ 1200 начинается, когда принимается 1202 выходной сигнал 808 согласованного фильтра 806. Как описывалось ранее, выходной сигнал 808 согласованного фильтра 806 включает в себя множество многолучевых сигналов. Многолучевые сигналы являются различными версиями одного и того же беспроводного сигнала, которые создаются отражениями от строений и естественных образований. Многолучевые сигналы сдвигаются по времени друг друга.
Каждый подканал 902 адаптационной компоненты 912 эквалайзера затем назначается для временного выравнивания с многолучевым сигналом в выходном сигнале 808. Это может быть выполнено задержкой 1024 выходного сигнала 808 согласованного фильтра 806 с различными временными задержками 900. Каждый задержанный вариант выходного сигнала 808 согласованного фильтра соответствует различным многолучевым сигналам. Каждый подканал 902 затем выполняет 1206 дескремблирование ПСШ и пилотное дескремблирование для получения шумовых пилотных символов из соответствующего многолучевого сигнала. Шумовые пилотные символы, получаемые из различных многолучевых сигналов, затем используются для выполнения 1208 канальной оценки и шумовой параметрической оценки. Затем получаются 1210 матрицы, используемые для вычисления весов 826 эквалайзера. Эти матрицы могут включать в себя матрицу 920 канальных оценок, матрицу 922 шумовых оценок и известную матрицу 926, которая является функцией компоненты 814 дескремблирования ПСШ и компоненты 816 сжатия. В одном варианте осуществления матрицей 920 канальных оценок является Ас (как определяется в уравнении (20)), матрицей 920 шумовых оценок является Λ, а известной матрицей 926 является Нс (как определяется в уравнениях (18)-(19)). Затем вычисляются веса 826 эквалайзера согласно уравнению (22).
Если беспроводной сигнал 801 посылался по восходящему каналу 304, то компоненты, показанные здесь, могут быть использованы в базовой станции 202. Будет понятно, что признаки изобретения могут быть использованы с различными компонентами либо беспроводных сигналов 801, принимаемых мобильной станцией 204, базовой станцией 202, либо другой компонентой в системе 100 беспроводной связи. Таким образом, вариант осуществления мобильной станции 204 является примерным вариантом осуществления систем и способов, но понятно, что системы и способы могут быть использованы в различных других контекстах.
Специалисту будет понятно, что информация и сигналы могут быть представлены с помощью большого разнообразия технологий и методов. Например, данные, команды, информация, сигналы, биты, символы и элементарные интервалы, на которые могут быть ссылки по всему вышеприведенному описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любыми их комбинациями.
Специалисту будет далее понятно, что различные показанные логические блоки, модули, схемы и шаги алгоритма, описанные вместе с раскрытыми здесь вариантами осуществления, могут быть осуществлены электронным аппаратным обеспечением, компьютерным программным обеспечением или их комбинациями. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратного и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и шаги описаны выше в общем в терминах их функций. Воплощены ли такие функции как аппаратное обеспечение либо как программное обеспечение, зависит от частного применения и конструктивных ограничений, наложенных на всю систему. Специалисты могут воплотить описанные функции различными путями для каждого конкретного применения, но такие решения по воплощению не должны интерпретироваться как влекущие отход от объема настоящего изобретения.
Различные показанные логические блоки, модули и схемы, описанные в связи с раскрытыми здесь вариантами осуществления, могут быть воплощены или выполнены процессором общего назначения, цифровым процессором сигналов (ЦПС) (DSP), проблемно-ориентированной интегральной микросхемой (ПОИМ) (ASIC), программируемой пользователем матрицей вентилей (ППМВ) (FPGA) или другим программируемым логическим устройством, дискретным вентилем или транзисторной логикой, дискретными аппаратными компонентами или их комбинациями, спроектированными для выполнения описанных здесь функций. Процессор общего назначения может быть микропроцессором, но в качестве альтернативы этот процессор может быть любым стандартным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор может также быть воплощен как комбинация вычислительных устройств, например, комбинация ЦПС и микропроцессора, множество микропроцессоров, один или несколько микропроцессоров вместе с ядром ЦПС или любая иная такая конфигурация.
Шаги способа или алгоритма, описанные в связи с раскрытыми здесь вариантами осуществления, могут быть воплощены непосредственно в аппаратном обеспечении, в исполняемом процессором программном модуле или в их сочетании. Программный модуль может находиться в памяти ОЗУ, флэш-памяти, памяти ПЗУ, памяти СППЗУ (стираемое программируемое постоянное запоминающее устройство) (EPROM), памяти ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство) (EEPROM), регистрах, жестком диске, сменном диске, компакт-диске или в любой другой форме носителя памяти, известной в уровне техники. Примерный носитель памяти связан с процессором, так что процессор может считывать информацию из этого носителя памяти и записывать информацию на носитель памяти. В качестве альтернативы, носитель памяти может быть неделим с процессором. Процессор и носитель памяти может находиться в ПОИМ. ПОИМ может находиться в пользовательском терминале. В качестве альтернативы, процессор и носитель памяти могут находиться в качестве дискретных компонентов в пользовательском терминале.
Способы, раскрытые здесь, содержат один или более шагов или действий для достижения описанного способа. Шаги и/или действия способа могут меняться местами один с другим без отхода от объема настоящего изобретения. Другими словами, если только конкретный порядок шагов или действий не требуется для должного осуществления варианта способа, порядок и/или использование конкретных шагов и/или действий могут быть изменены без отхода от объема настоящего изобретения.
Предыдущее описание раскрытых вариантов осуществления предназначено для любого специалиста, чтобы сделать или использовать настоящее изобретение. Различные изменения этих вариантов осуществления будут быстро понятны специалисту, а основные принципы, описанные здесь, могут быть применены для других вариантов осуществления без отхода от сущности и объема изобретения. Таким образом, настоящее изобретение не предназначено для ограничения показанными здесь вариантами осуществления, но должно согласовываться с самым широким объемом, совместимым с раскрытыми здесь принципами и новыми признаками.
Изобретение относится к системам связи, к адаптивному эквалайзеру для использования с системами беспроводной связи. Достигаемый технический результат - улучшение отношения сигнал/шум при многолучевом распространении сигнала. Способ оценки передаваемого сигнала в системе беспроводной связи характеризуется тем, что осуществляют прием беспроводного сигнала, который содержит пилотный канал и, по меньшей мере, один другой канал, осуществляют оценку передаваемого сигнала с помощью эквалайзера и принятого беспроводного сигнала, адаптацию отводов эквалайзера через использование канальной оценки, шумовой оценки и известной матрицы, имеющей компоненту сжатия, разделение пилотного сигнала и, по меньшей мере, одного другого канала. Мобильная станция для использования в системе беспроводной связи характеризуется тем, что оценивает передаваемый сигнал, при этом содержит пилотный канал и, по меньшей мере, один другой канал, приемник, эквалайзер для оценивания передаваемого сигнала, при этом эквалайзер включает в себя фильтр со множеством отводов, адаптационную компоненту эквалайзера для адаптации отводов через использование канальной оценки, шумовой оценки и известной матрицы, имеющей компоненты сжатия, компоненту для разделения пилотного канала и, по меньшей мере, одного другого канала, при этом канальная оценка и шумовая оценка вычисляются из пилотного сигнала, известная матрица получается из таблицы перекодировки. Охарактеризован в системе беспроводной связи машиночитаемый носитель с сохраненными на нем командами для осуществления способа оценки передаваемого сигнала. 6 н. и 91 з.п. ф-лы, 12 ил.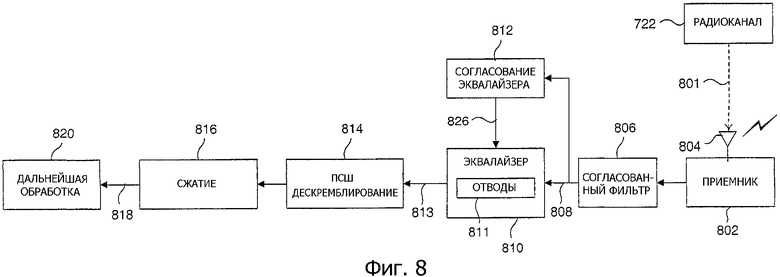
по меньшей мере одну антенну для приема беспроводного сигнала, который содержит пилотный канал и по меньшей мере один другой канал; приемник в электрической связи по меньшей мере с одной антенной; эквалайзер для оценивания передаваемого сигнала, причем эквалайзер включает в себя фильтр со множеством отводов; адаптационную компоненту эквалайзера для адаптации отводов через использование канальной оценки, шумовой оценки и известной матрицы, имеющей компоненту сжатия, причем канальная оценка и шумовая оценка вычисляются из пилотного канала, и известная матрица получается из таблицы перекодировки, и причем канальная оценка вычисляется из пилотного канала, и упомянутый пилотный канал был передан по меньшей мере с одним другим каналом; и компоненту для разделения пилотного канала и по меньшей мере одного другого канала.
| US 6175588 B1, 16.01.2001 | |||
| RU 97107847 A, 27.05.1999 | |||
| Система управления реверсивным станом холодной прокатки | 1981 |
|
SU1014609A1 |
| US 5278835 A, 10.01.1994 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

