ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к горной промышленности, а более конкретно к навигационной системе горного комбайна, предназначенного для работы в уступе карьера, и к указанному комбайну, содержащему такую систему.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Уголь, образованный из разложившегося и спрессованного растительного вещества, обычно залегает по существу в горизонтальных пластах, проходящих между слоями осадочных горных пород, таких как известняк, песчаник или сланец. Основными способами, используемыми для добычи этого угля, являются открытая и подземная разработки месторождений.
Для того чтобы обнажить уголь, предназначенный для добычи, наземная, или открытая разработка включает в себя удаление материала, известного как вскрышный слой грунта, который покрывает угольный пласт. В последние годы в США открытая разработка месторождений выступает на первый план по сравнению с разработкой подземным способом. Это происходит вследствие многих причин, в числе которых:
a) повышенная пропускная способность горного оборудования, которое используется для наземной или открытой разработки месторождений,
b) более низкие затраты при наземной разработке месторождений по сравнению с затратами при разработке подземным способом,
c) лучшие показатели по технике безопасности при наземной разработке месторождений по сравнению с разработкой подземным способом,
d) более высокий процент добычи угля при извлечении угольных запасов путем наземной разработки.
Однако в действительности несмотря на упомянутые преимущества наземная разработка месторождений имеет свои ограничения. Главный ограничивающий фактор имеет отношение к толщине вскрышного слоя грунта. Когда угольный пласт достигает определенной глубины ниже поверхности, объем вскрышного слоя грунта, который необходимо удалить, чтобы добраться до угля, делает открытую разработку просто экономически невыгодной.
При этом в почве пласта могут еще оставаться большие запасы угля. Чтобы добиться рентабельной добычи этого угля, нужно использовать другие способы разработки месторождений. Обычно в этом случае использование подземного способа разработки месторождений очень ограничено. Это может быть вследствие ряда причин, в число которых входят слабая опорная кровля, малая толщина пласта и/или недостаточный запас угля, который не может оправдать большие капиталовложения, являющиеся отличительной особенностью разработки месторождений подземным способом.
Вследствие указанных замечаний после проведения разработки месторождений открытым способом часто применялся метод шнекобуровой разработки месторождений, при котором процесс удаления вскрышного слоя грунта становится слишком дорогостоящим. Для проникновения в поверхность пласта и добычи угля, находящегося под вскрышным слоем грунта, используют большую шнекобуровую машину. Разработка месторождений шнекобуровым способом преимущественно очень эффективна, обеспечивая большее количество тонн добычи на человека в день по сравнению с любым другим способом добычи. Кроме того, разработка месторождений шнекобуровым методом может быть быстро введена в эксплуатацию и требует относительно низких капиталовложений по сравнению с разработкой месторождений открытым и подземным способами. Более того, до настоящего времени считалось, что лучшим способом проведения работ в сравнительно тонких пластах является разработка месторождений шнекобуровым методом. Кроме того, разработка месторождений шнекобуровым методом более безопасна, чем разработка как открытым, так и подземным способами. Таким образом, разработка месторождений шнекобуровым методом может быть использована для эффективного дополнения процесса разработки открытым способом и для разработки небольших месторождений угля, которые, в противном случае, пришлось бы забросить.
Однако разработка месторождений шнекобуровым методом также имеет недостатки. Разработка месторождений шнекобуровым методом предусматривает сравнительно низкую общую добычу угля. Выход полезного угольного компонента для зоны полезных ископаемых, которую разрабатывают шнекобуровым методом, обычно составляет менее 35%. Отчасти потеря выхода полезного компонента обусловлена целиками угля, которые оставляют стоящими для поддержки вскрышного слоя грунта между соседними буровыми отверстиями. Однако большая часть дефицита мощности добычи обусловлена ограниченными глубинами бурения, которые достигаются даже современным оборудованием для шнекобурового бурения.
Более конкретно, по мере увеличения глубин бурения требуется большее количество секций шнекового бура для того, чтобы транспортировать уголь от режущей головки к поверхности разрабатываемого пласта. Каждая секция добавляет сопротивление трения при повороте шнекового бура вследствие соприкосновения со стенками бурового отверстия. Кроме того, чем длиннее колонна шнекобуровых секций, тем больше масса угля, перемещаемого секциями в любой момент времени. В результате следует отметить, что с глубиной проникновения шнекового бура резко возрастают потребности в электроэнергии для шнекобуровой машины.
Вследствие вышеуказанных замечаний скважины, пробуренные обычным шнекобуровым оборудованием, как правило, имеют глубину только около 46 м (150 футов); глубина 61 м (200 футов) встречается редко. Конечно, желательно любым путем увеличить это значение, поскольку это существенно улучшило бы интенсивность выемки угля из зоны добычи.
Для выполнения этой цели были предложены система и способ добычи полезных ископаемых. В частности, такая система и способ добычи полезных ископаемых в уступе карьера описаны в ряде патентов США, которые находятся в собственности обладателя прав на настоящее изобретение. Такими патентами являются патенты №5522647, 5364171, 5261729 и 5232269. Полное описание этих патентов включено в настоящую заявку посредством ссылки.
Как лучше показано на фиг.1, система добычи полезных ископаемых содержит горный комбайн, предназначенный для поточной вырубки угля из угольного пласта. Вырубленный уголь подается с помощью комбайна в конвейерную цепь, содержащую ряд модульных конвейерных узлов, последовательно соединенных друг с другом. Указанная система позволяет вести разработку месторождений на глубинах, значительно превышающих 46-61 м (150-200 футов), характерных для обычного шнекобурового добывающего оборудования. Фактически, можно достигнуть глубин примерно до 610 м (2000 футов).
Каждый конвейерный узел опирается на колеса, контактирующие с грунтом, которые позволяют ему следовать за комбайном по мере его продвижения вперед в угольный пласт. В указанную новую систему также входит выпускное транспортное средство, которое содержит конвейерный механизм, предназначенный для приема и транспортировки угольной массы, выпущенной с конвейерной цепи. Кроме того, выпускное транспортное средство содержит направляющее устройство, предназначенное для крепления последнего узла конвейерной цепи и конвейерного узла, который должен быть добавлен к цепи. Более того, имеются комплекты индивидуальных приводных узлов, предназначенные, во-первых, для выдвижения вперед/перемещения назад конвейерной цепи вместе с комбайном и, во-вторых, для сцепки нового конвейерного узла с конвейерной цепью. Система позволяет преимущественно вырубать и транспортировать угольную массу без задержки, даже во время добавления к цепи конвейерного узла. Поэтому система не только обеспечивает значительное увеличение выхода полезного компонента из зоны добычи, но также работает более эффективно, чем шнекобуровое оборудование, и обеспечивает повышенную производительность.
Данное изобретение относится к навигационной системе, предназначенной для горного комбайна, которая обеспечивает точное вождение комбайна для того, чтобы сохранить в надлежащем состоянии целик, находящийся между горными выработками, и чтобы оборудование не проваливалось в ранее выработанное отверстие, даже если разработку месторождения проводят на самых отдаленных от угольной поверхности глубинах. Более того, навигационная система не позволяет комбайну отклоняться от угольного пласта, и, следовательно, разработка месторождения происходит с большей эффективностью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с целями данного изобретения, описанными в данном документе, предложено усовершенствованное устройство для добычи полезных ископаемых. Предложенное устройство содержит комбайн, конвейерный узел и рулевой узел, соединяющий комбайн с конвейерным узлом. Кроме того, предлагаемое устройство содержит позиционный датчик, устройство управления, реагирующее на позиционный датчик, и первый и второй приводы.
Первый и второй приводы расположены либо на комбайне, либо на конвейерном узле, либо на рулевом узле. Первый привод расположен с одной стороны средней линии комбайна. Второй привод расположен с другой, противоположной стороны средней линии комбайна. Первый и второй приводы регулируют угол соединения между комбайном и конвейерным узлом по любую сторону параллели для того, чтобы установить направление проходки для комбайна.
Если говорить об изобретении более подробно, то первый привод содержит первый выполненный с возможностью смещения направляющий элемент. Аналогично, второй привод содержит второй выполненный с возможностью смещения направляющий элемент. Первый выполненный с возможностью смещения направляющий элемент имеет первый конец, на котором имеется первая выпуклая головка, в то время как второй выполненный с возможностью смещения направляющий элемент имеет второй конец, на котором имеется вторая выпуклая головка. Радиус кривизны как первой, так и второй выпуклых головок составляет около 406 мм (шестнадцати дюймов).
В одном возможном варианте выполнения первый привод представляет собой первый гидравлический цилиндр, а второй привод представляет собой второй гидравлический цилиндр. Каждый из цилиндров может иметь внутреннее отверстие около 254 мм (10 дюймов), ход около 38,1 мм (1,5 дюймов) и нагрузку до 24,6 кг/см2 (3500 фунтов на квадратный дюйм) для создания усилия до 1218813 Н (137 тонн).
В одном варианте выполнения изобретения первый и второй приводы расположены на рулевом узле. В этом варианте выполнения первая и вторая головки/концы контактируют соответственно с первой и второй соответствующими опорными поверхностями комбайна. Путем выдвижения вперед одного привода и перемещения назад второго привода регулируется угол соединения между комбайном и конвейерным узлом с целью проведения комбайна в заданном направлении проходки.
Во втором варианте выполнения первый и второй приводы также расположены на рулевом узле. Однако первая и вторая головки/концы находятся во взаимодействии соответственно с первой и второй взаимодействующими опорными поверхностями конвейерного узла. Вождение комбайна в заданном направлении проходки также достигается путем выдвижения вперед и перемещения назад приводов настолько, насколько это необходимо.
В еще одном варианте выполнения изобретения первый и второй приводы закреплены на комбайне. Первый и второй концы приводов находятся во взаимодействии с первой и второй взаимодействующими опорными поверхностями рулевого узла. И в этом случае вождение комбайна обеспечивается согласованным выдвижением вперед и перемещением назад приводов.
В следующем альтернативном варианте выполнения первый и второй приводы закреплены на конвейерном узле. В указанном варианте выполнения первый и второй концы соответственно находятся во взаимодействии с первой и второй взаимодействующими опорными поверхностями рулевого узла. И снова взаимное выдвижение вперед и перемещение назад приводов регулирует угол соединения между комбайном и конвейерным узлом, таким образом, ведя комбайн в соответствии с заданным направлением проходки.
Описывая изобретение далее, можно сказать, что рулевой узел присоединен к комбайну с помощью первой поворотной оси, а к конвейерному узлу - с помощью второй поворотной оси. Первая поворотная ось проходит в первой плоскости, в то время как вторая поворотная ось проходит во второй плоскости. По существу эти две плоскости могут быть перпендикулярны друг другу.
В одной конструкции первая плоскость является горизонтальной, в то время как вторая плоскость является вертикальной. В другой конструкции первая плоскость является вертикальной, в то время как вторая плоскость является горизонтальной. Горизонтальное/вертикальное и вертикальное/горизонтальное расположение осей преимущественно обеспечивает достаточную степень свободы или зазор, необходимый для того, чтобы позволить комбайну и конвейерному узлу не отклоняться от пласта по мере перемещения в слое вверх или вниз, учитывая любые возможные неровности поверхности, которые могут возникнуть на пути. Более того, зазор по сторонам позволяет корректировку курса, так что между выработками или отверстиями, включая те, которые проходят вглубь позади открытой поверхности пласта, целик может быть сохранен в надлежащем состоянии.
В соответствии с еще одним аспектом данного изобретения устройство может содержать датчик минерального пласта. Такой датчик минерального пласта, как гамма-датчик, обеспечивает определение верхней и нижней границы разрабатываемого минерального пласта. После этого можно управлять работой самозарубающегося барабана, чтобы обеспечить выемку добытого камня, не прорубаясь через пласт в слой, расположенный выше или ниже его. Более того, это позволяет оператору сохранять нужную конфигурацию кровли.
В соответствии с еще одним аспектом данного изобретения устройство наведения предназначено для устройства для добычи полезных ископаемых, в состав которого входит комбайн и конвейерный узел. Устройство наведения можно описать как устройство, содержащее позиционный датчик, устройство управления, реагирующее на позиционный датчик, и по меньшей мере один привод, реагирующий на устройство управления и предназначенный для регулировки направления проходки для комбайна.
С другой стороны, устройство наведения можно описать как устройство, в состав которого входит позиционный датчик, устройство управления, реагирующее на позиционный датчик, и рулевой узел, соединенный как с комбайном, так и с конвейерным узлом. Устройство дополнительно содержит первый привод, расположенный либо на комбайне, либо на конвейерном узле, либо на рулевом узле. Первый привод реагирует на устройство управления для регулировки угла соединения между комбайном и конвейерным узлом для регулировки направления проходки для комбайна.
В соответствии с еще одним аспектом данного изобретения предложен способ проведения сквозь минеральный пласт устройства для добычи полезных ископаемых, содержащего комбайн и по меньшей мере один конвейерный узел. Способ включает этапы размещения направляющего механизма между комбайном и указанным по меньшей мере одним конвейерным узлом, приложение усилия между комбайном и указанным по меньшей мере одним конвейерным узлом, при помощи чего меняют угол соединения между комбайном и конвейерным узлом, и продвижение указанного устройства для добычи полезных ископаемых вперед после регулировки угла соединения.
В другом варианте способ можно определить как способ, включающий этапы определения реального местоположения комбайна, сравнение реального местоположения комбайна с заданным местоположением и направлением проходки комбайна, настройку рулевого механизма, расположенного между комбайном и конвейерным узлом, с обеспечением перевода комбайна на заданное направление проходки, и продвижение комбайна вперед по указанному направлению.
С помощью еще одного альтернативного определения способ можно описать как способ, включающий этап регулировки направления движения комбайна путем регулировки угла соединения между комбайном и конвейерным узлом.
В приведенном ниже описании представлены и описаны несколько вариантов выполнения данного изобретения путем простой иллюстрации некоторых моделей, которые наилучшим образом подходят для выполнения изобретения. Очевидно, что возможны различные варианты выполнения изобретения, а его некоторые детали допускают модификации в разных очевидных аспектах, полностью входящих в рамки изобретения. Следовательно, чертежи и описание будут рассматриваться, по сути, в качестве иллюстративных, а не ограничительных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, включенные в состав описания и образующие его часть, иллюстрируют некоторые аспекты данного изобретения, а совместно с описанием служат для разъяснения некоторых принципов изобретения. На чертежах:
Фиг.1 представляет собой схематичный вид предлагаемого устройства для добычи полезных ископаемых, в состав которого входит выпускной транспортер, горный комбайн, составные модульные конвейерные узлы, которые образуют конвейерную цепь, расположенную позади комбайна, и направляющий механизм, предназначенный для регулировки курса комбайна по мере его продвижения вперед в минеральный пласт,
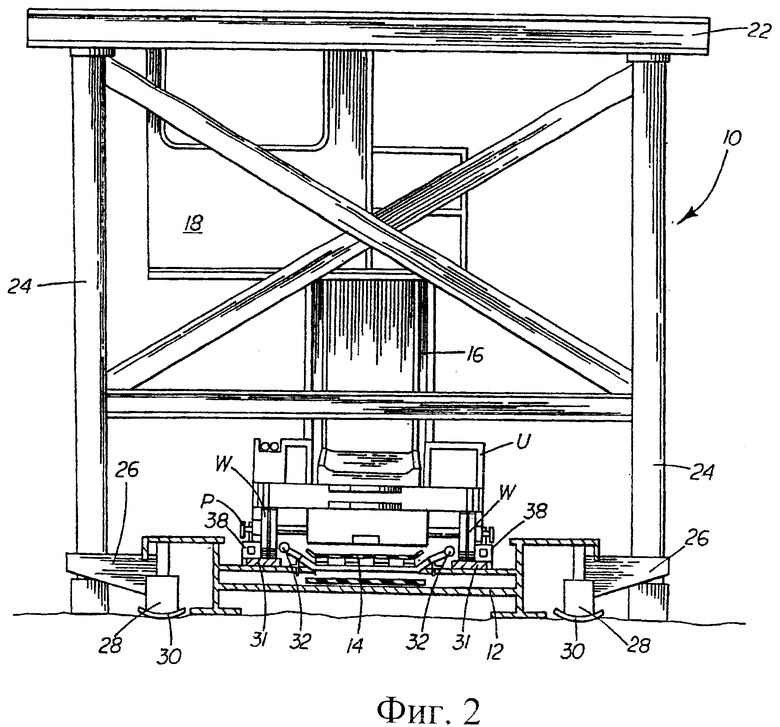
Фиг.2 представляет собой частичный разрез, схематично изображающий модульный конвейерный узел, опирающийся на раму выпускного транспортера,
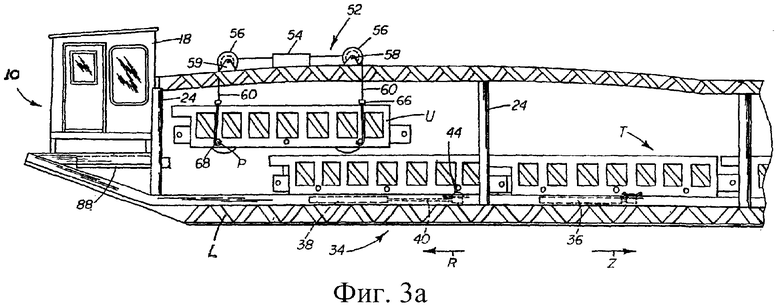
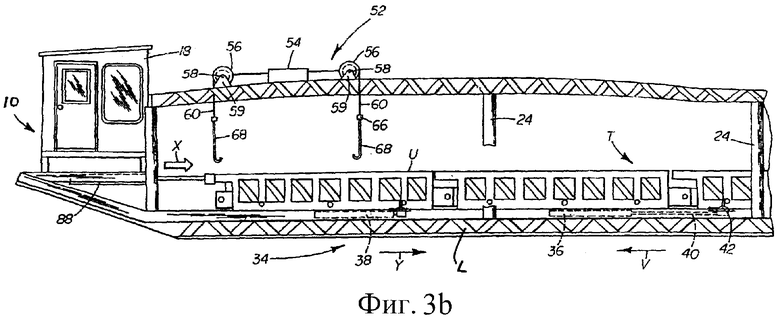
Фиг.3а и 3b представляют собой схематичные виды сбоку, иллюстрирующие продвижение вперед конвейерной цепи за счет перемещения вперед и назад пары взаимодействующих комплектов приводных цилиндров сдвоенного типа, а также добавление к цепи модульного конвейерного узла,
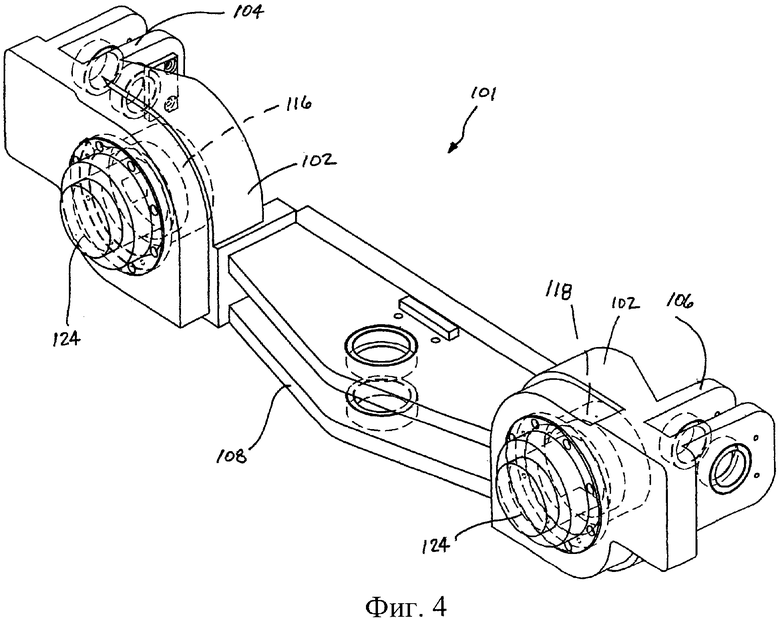
Фиг.4 представляет собой вид в аксонометрии рулевого узла,
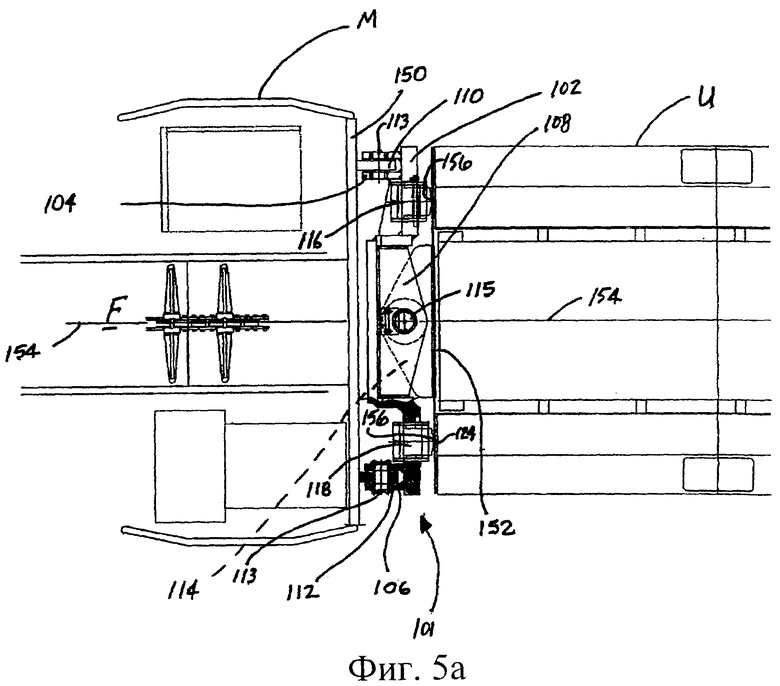
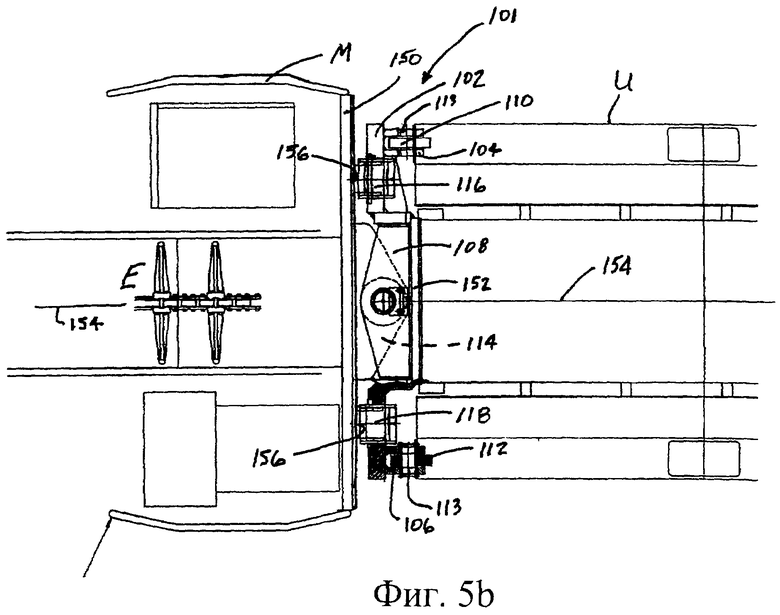
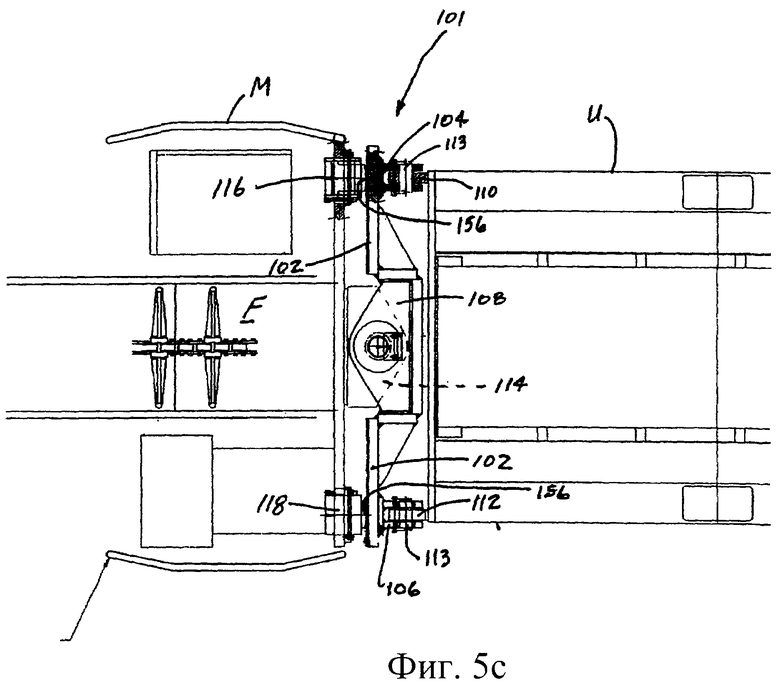
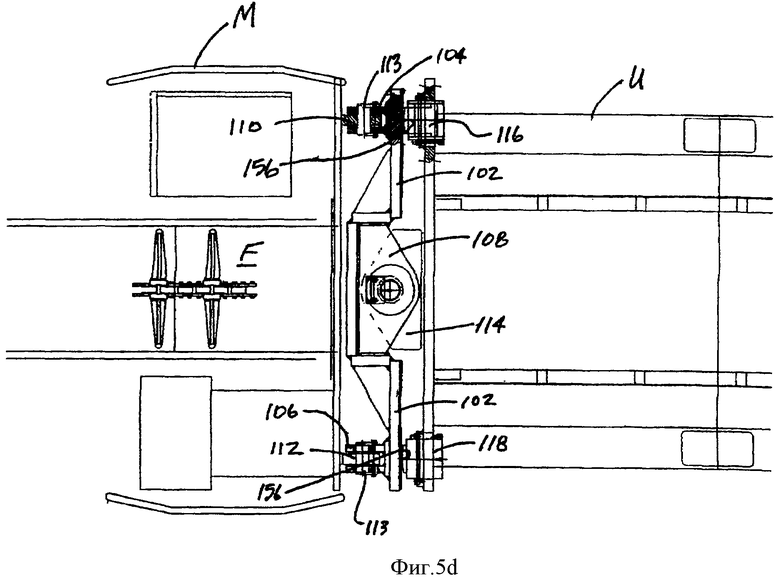
Фиг.5а - 5d представляют собой схематичные виды сверху четырех различных вариантов выполнения данного изобретения, иллюстрирующие расположение рулевого узла между горным комбайном и конвейерным узлом и местоположение приводов на рулевом узле, на комбайне или на конвейерном узле,
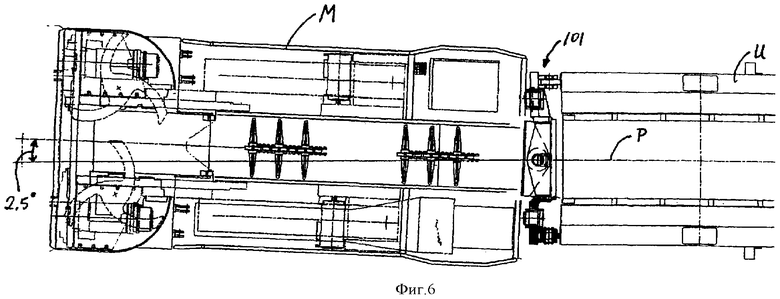
Фиг.6 представляет собой схематичный вид сверху, иллюстрирующий, каким образом может быть изменен относительно параллели угол соединения между комбайном и конвейером для того, чтобы обеспечить изменение указанного курса комбайна,
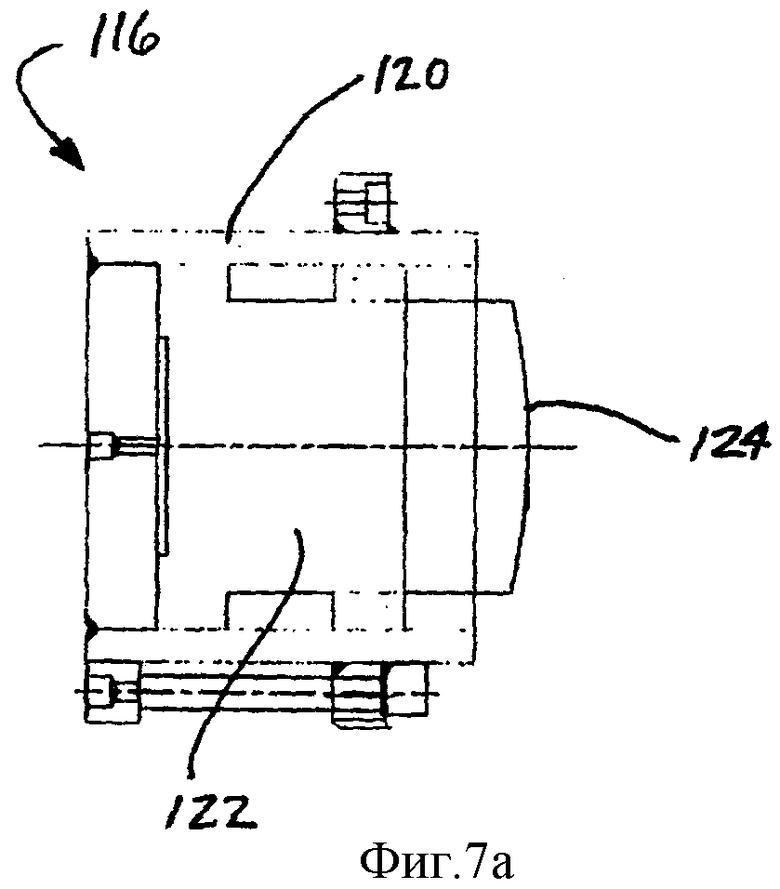
Фиг.7а представляет собой схематичное изображение одного из приводов данного изобретения,
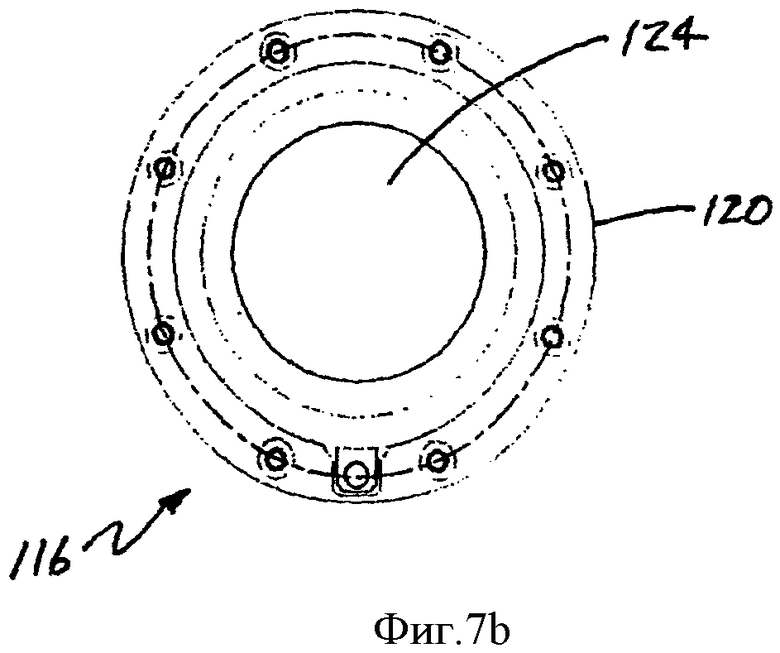
Фиг.7b представляет собой вид спереди привода, изображенного на фиг.7а,
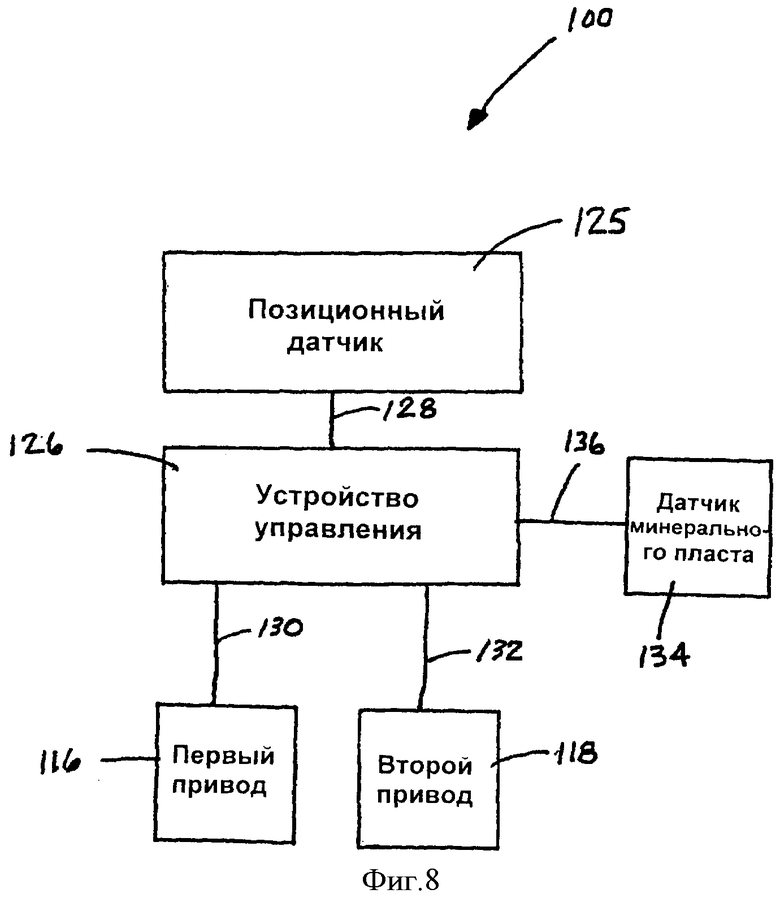
Фиг.8 представляет собой схематичную блок-схему системы наведения, используемой в данном изобретении.
Ниже подробно описаны варианты выполнения данного изобретения, представленные на чертежах.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Теперь обратимся к фиг.1, 2, 3а и 3b, схематично изображающим предлагаемое устройство 10 для добычи полезных ископаемых. Устройство 10 содержит выпускное транспортное средство L, предназначенное для использования с системой для добычи полезных ископаемых поточным способом, содержащей горный комбайн М для работы поточным способом известного в данной области техники типа. Горный комбайн М содержит вращающийся головной самозарубающийся барабан D, служащий опорой для резцовых коронок, установленных на спиральных секциях (не показаны). Барабан D установлен с возможностью вращения на вертикально перемещающейся стреле, которая установлена с возможностью поворота на основной части рамы комбайна М. Кроме того, показано, что горный комбайн опирается на пару гусеничных узлов N, предназначенных для перемещения по основанию шахты.
В процессе работы комбайн М продвигают в поверхность S пласта предпочтительно с поднятой стрелой и вращающимся барабаном D. Когда начинается процесс вырубания на верхнем уровне или на уровне кровельного свода пласта, горный комбайн М продвигают дальше вперед, а стрелу постепенно опускают. По мере того как горный комбайн М продвигается вперед, а стрела поднимается и опускается, из поверхности пласта S вырубается каменный уголь С.Затем угольную массу С собирают с помощью обычного загребающего ковша, который служит для подачи угольной массы в передвижной конвейер F.
Как показано на фиг.1, конвейер F подает весь уголь к переднему конвейерному узлу U конвейерной цепи, которая в целом обозначена буквой Т. Кроме того, конвейерная цепь Т содержит ряд одинаковых модульных конвейерных узлов U, которые соединены вместе последовательно за передним конвейерным узлом с возможностью отсоединения.
В опубликованном патенте США №5112111, озаглавленном «УСТРОЙСТВО И СПОСОБ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОТОЧНЫМ СПОСОБОМ» и переуступленном обладателю прав на настоящее изобретение, наилучшим образом описано, что каждый из конвейерных узлов U содержит главную несущую раму, опирающуюся на колеса W, предназначенные для перемещения по грунту. Кроме того, в центре каждого конвейерного узла U находится проходящий в продольном направлении наклонный конвейер. Указанный конвейер представляет собой конвейер предпочтительно ленточного типа и служит для передачи угольной массы С, поступившей в нижнюю часть, наверх, где она последовательно выбрасывается из одного конвейерного узла U в следующий конвейерный узел. Каждый конвейерный узел U также содержит свой собственный двигатель, предназначенный для приведения в движение установленной в нем конвейерной ленты. Кроме того, узлы U конвейерной цепи Т взаимосвязаны посредством линий управления, которые сначала идут от такого источника питания, как генератор (не показан), установленный на уступе карьера, к горному комбайну М, а затем обратно через отдельные конвейерные узлы U. Следовательно, двигатели конвейерных узлов U соединены последовательно для синхронной работы, по существу, при согласованной скорости.
Кроме того, каждый конвейерный узел U содержит автосцепку G, специально предназначенную для жесткого соединения узлов вместе таким образом, чтобы узлы цепи Т были расположены позади горного комбайна М исключительно по прямой линии. Указанная автосцепка может, например, содержать на каждом узле конвейера сцепные хомуты, которые соединяются встречно-штыревым способом с помощью болта.
Из изображения, представленного на фиг.1, понятно, что конвейерная цепь Т содержит столько конвейерных узлов U, сколько необходимо, чтобы цепь доходила от пласта до выпускного транспортного средства L, установленного на уступе В. Видно, что уступ В предпочтительно вырубают ниже подошвы пласта для того, чтобы поместить выпускное транспортное средство или платформу L.
Как лучше всего видно из фиг.2, 3а и 3b, выпускное транспортное средство L содержит главный несущий каркас 12, который поддерживает конвейер 14 для массы материала, предпочтительно ленточного типа. Указанный конвейер 14 получает угольную массу С от последнего конвейерного узла U цепи Т. Затем уголь С доставляют с помощью конвейера 14 вверх по наклонной поверхности 16, расположенной под кабиной 18 операторского пульта, к выпускному конвейеру 20. Выпускной конвейер 20 также наклонен и может, например, быть использован для транспортирования угольной массы С к месту приемки, такому как кузов грузовика, который используют для отправки угля на складирование или для дальнейшей обработки.
Кроме того, как видно из фиг.2, 3а и 3b, выпускное транспортное средство L содержит защитный козырек 22, соединенный с главным несущим каркасом 12 с помощью расположенных через интервалы опорных стоек 24 и распорок 26. Вдоль длины выпускного средства L на определенном расстоянии друг от друга расположены две группы домкратов 28, которые опираются на полозья 30 и могут быть приведены в действие для подъема главного несущего каркаса 12 выпускного средства L с уступа В для того, чтобы с помощью тяжелого оборудования или направляющих рельсов шнекобуровой машины переместить выпускное транспортное средство к месту разработки месторождения.
Кроме того, как видно из фиг.2, выпускное транспортное средство L содержит пару направляющих 31 в виде расположенных на определенном расстоянии решетчатых напольных секций, на которые опираются контактирующие с грунтом колеса W модульных узлов U. Кроме того, рядом с наружными сторонами конвейера 14 имеется пара направляющих поручней 32. Эти направляющие поручни 32 проходят вверх над решетчатыми напольными секциями 31 в наружном направлении от конвейера 14 по направлению к внутренним поверхностям колес W узлов U. В случае если узел U расположен на выпускном транспортном средстве L с небольшим отклонением от одной линии с конвейером 14, внутренние поверхности колес будут зацеплять поручни 32, переориентируя, таким образом, модульный узел U с конвейерной цепью Т настолько, насколько это необходимо для обеспечения соответствующего расположения по одной линии. Преимущественно, за счет сохранения соответствующего расположения последнего узла конвейерной цепи Т таким образом, чтобы он лежал выше конвейера 14, все сырье из конвейерной цепи собирается и перемещается конвейером выпускного транспортного средства в течение всего процесса работы.
На фиг.3а и 3b лучше всего видно, что средство L также содержит приводной узел, как правило, обозначенный номером 34 позиции. Приводной узел 34 специально предназначен для выборочного содействия продвижению вперед или обратному ходу конвейерной цепи Т. Более конкретно, приводной узел 34 содержит пару согласованных сдвоенных комплектов 36, 38 приводных цилиндров. Из каждого комплекта 36, 38 только один приводной цилиндр показан на фиг.3а и 3b, так как цилиндры тандемного типа установлены на главном несущем каркасе 12 по бокам конвейера 14 (смотри также фиг.2). Видно, что передний комплект 36 цилиндров установлен продольно на определенном расстоянии от заднего комплекта 38 цилиндров и на одной линии с ней. Более того, из изображения, представленного на фиг.2, понятно, что каждый комплект 36, 38 цилиндров имеет левосторонний и правосторонний цилиндр. Оба цилиндра тандемного типа переднего комплекта 36 работают одновременно. Подобным образом оба цилиндра тандемного типа заднего комплекта 38 работают одновременно.
Каждый приводной цилиндр комплектов 36, 38 содержит выдвижной шток 40. На ближнем к месту крепления конце каждого штока 40 цилиндра установлен узел толкающего рычага. Каждый узел толкающего рычага содержит по существу V-образный толкающий рычаг 44, шарнирно прикрепленный к основанию с помощью шарнирного пальца. Как описано в опубликованном патенте США №5232269, озаглавленном «Выпускное транспортное средство для разработки угольного месторождения поточным способом», толкающий рычаг 44 может быть выборочно расположен в первом положении для взаимодействия с соответствующим штифтом Р на конвейерном узле U и продвижения конвейерной цепи Т вперед в угольный пласт S. С другой стороны, толкающий рычаг 44 может быть выборочно расположен во втором, противоположном положении также для взаимодействия с соответствующим штифтом Р и обратного хода конвейерной цепи Т из угольного пласта S.
Преимущественно, приводной узел 34 является достаточно мощным, чтобы способствовать продвижению вперед (обратному ходу) конвейерной цепи Т и горного комбайна М в поверхность пласта S (от поверхности пласта S). Это является особенно важным преимуществом, поскольку во многих зонах разработки месторождений основание пласта, например огнеупорная глина, находится в слабом состоянии. Гусеницы N обычного горного комбайна М имеют тенденцию выбивать колею в слабом основании до тех пор, пока «самые высокие точки» главной рамы горного комбайна не завязнут в неразбитом материале основания, расположенного внутри колеи. Следовательно, горный комбайн М, предназначенный для работы поточным способом, имеет тенденцию застревать там, где основание находится в слабом состоянии. По существу, в прошлом часто остерегались производить разработку пластов указанных типов. А теперь с созданием указанной системы становится возможной разработка таких пластов. Таким образом, данное устройство эффективно открывает пути для разработки новых площадей месторождений, таким образом, увеличивая извлекаемые запасы угля.
Кроме того, выпускное средство L, представленное в данном изобретении, содержит механизм, предназначенный для присоединения отдельных модульных конвейерных узлов U к конвейерной цепи Т по мере ее продвижения вперед в угольный пласт. Механизм, предназначенный для присоединения модульного конвейерного узла, в целом обозначен номером 52 позиции и лучше всего представлен на фиг.3а и 3b. Механизм 52 для присоединения модульного конвейерного узла содержит источник питания или приводной электродвигатель 54, соединенный посредством выходной трансмиссии (не показана) с парой приемных барабанов 56. Каждый приемный барабан 56 установлен с возможностью вращения на валу 58, размещенном в опоре 59, присоединенной к защитному козырьку 22. Один приемный барабан 56 установлен рядом с кабиной 18 оператора. Другой приемный барабан 56 вынесен вперед относительно первого барабана примерно на длину одного конвейерного узла (то есть на 13,5 м (45 футов)).
К каждому приемному барабану 56 присоединен канат или прочный трос 60. Более конкретно, расположенный ближе к месту крепления конец каждого каната 60 прикреплен к соответствующему приемному барабану 56 таким образом, чтобы вращение барабана отпускало или подтягивало канат. Дальний от места крепления конец каждого каната 60 прикреплен с помощью траверсы 62 к стропу 64, который держит поперечину 66. На каждом конце поперечины 66 прикреплена пара висящих крюков 68. Крюки 68 предназначены для захвата штифтов Р, расположенных по краям конвейерного узла U, который должен быть подвешен с помощью каната 60 лебедки. Конечно, может быть использована любая другая соответствующая конструкция, предназначенная для соединения каната 60 лебедки с конвейерным узлом U.
Возможность добавления неограниченного количества модульных конвейерных узлов U к конвейерной цепи Т преимущественно согласована с гусеничными узлами N горного комбайна М и комплектами 36, 38 приводных цилиндров на выпускном транспортном средстве L для обеспечения необходимых требований к разрабатываемым глубинам, находящимся ниже обнаженной поверхности пласта. Фактически, можно достигнуть значения глубин от 488 м до 540 м (от 1600 до 1800 футов) или более. Однако чтобы обеспечить наиболее рациональную и эффективную разработку месторождения, горный комбайн должен быть строго управляем по мере его продвижения вперед в пласт. Это нужно для того, чтобы между каждой горной выработкой сохранить опору, стену или угольный целик для поддержания вскрышного слоя грунта и предотвращения нежелательного оседания после процесса разработки месторождения. Более того, в случае проходки горного комбайна М через целик в соседнюю горную выработку может случиться обрушение кровли. Это может привести к тому, что горный комбайн М и возможно несколько конвейерных узлов U провалятся глубоко в угольный пласт. Горный комбайн М представляет собой значительные капиталовложения, и его потеря должна быть предотвращена любыми возможными способами. Кроме того, даже если возможно успешно произвести полное восстановление комбайна, нужно принять во внимание то, что на время восстановительных работ угольное производство должно быть закрыто, при этом оператора штрафуют на значительную сумму. Таким образом, нужно принять во внимание то, что рациональная и эффективная глубокая разработка месторождения в уступе карьера зависит от возможности точного определения местоположения комбайна М и точного ведения комбайна по указанному курсу, что необходимо для сохранения надлежащего размера целика и предотвращения провала комбайна в соседние буровые скважины.
Ниже описано устройство 100 наведения, предназначенное для обеспечения необходимой точности вождения горного комбайна М в целях сохранения надлежащего целика между горными выработками во время глубокой разработки месторождения. Если говорить более конкретно, то на фиг.4 схематично изображен рулевой узел, в целом обозначенный номером 101 позиции. Видно, что рулевой узел прикреплен между горным комбайном М и первым конвейерным узлом U, находящимся позади комбайна. Как лучше всего видно из фиг.5а - фиг.5d и фиг.6, рулевой узел 101 содержит раму 102. К первому боковому торцу рамы 102 примыкает первый хомут 104. Подобным образом второй хомут 106 примыкает ко второму противоположному боковому торцу рамы 102. Третий хомут 108 расположен вдоль промежуточной части рамы 102 между первым и вторым хомутами 104 и 106. Более того, нужно принять во внимание то, что два наружных хомута 104, 106 выполнены на первой поверхности рамы 102 и повернуты в одном направлении, в то время как третий хомут 108 выполнен на поверхности рамы, расположенной с другой стороны, и повернут в другом направлении, отличающемся от первого. Дополнительно нужно принять во внимание то, что первый и второй хомуты 104 и 106, расположенные на торцах рамы 102, содержат пару взаимосвязанных пластин, проходящих в вертикальном направлении. Третий хомут 108, выполненный на промежуточном участке рамы, содержит пару взаимосвязанных пластин, проходящих по существу в горизонтальном направлении.
Каждый хомут 104, 106, 108 ограничивает паз для введения крепежной проушины или кронштейна 110, 112, 114 соответственно. Как будет более подробно описано ниже, каждая крепежная проушина или кронштейн 110, 112, 114 выполнены либо на горном комбайне М, либо на конвейерном узле U. В расположенных на одной линии сопряженных отверстиях первого хомута 104 и крепежного кронштейна 110 закреплена первая поворотная ось для крепления кронштейна 110 в хомуте. Другая первая поворотная ось 116 закреплена в расположенных по одной линии сопряженных отверстиях второго хомута 106 и крепежного кронштейна 112 для крепления указанного кронштейна в хомуте. Вторая поворотная ось 118 закреплена в расположенных по одной линии сопряженных отверстиях третьего хомута 108 и крепежного кронштейна 114 для крепления указанного кронштейна в третьем хомуте.
Как дополнительно показано со ссылками на фиг.8, устройство 100 также содержит первый привод 116 и второй привод 118. Как показано на фиг.7а и фиг.7b, первый привод 116 может содержать гидравлический цилиндр 120 и соответствующий поршень/направляющий элемент 122, выполненный с возможностью смещения. На переднем конце направляющего элемента 122 имеется первая выпуклая головка 124. В представленном варианте выполнения радиус кривизны выпуклой головки 124 составляет 406 мм (шестнадцать дюймов). Хотя это не показано, второй привод 118 может содержать второй гидравлический цилиндр, второй поршень/направляющий элемент, выполненный с возможностью смещения, и вторую головку, которые аналогичны описанным выше со ссылкой на первый привод 116 и представленным на фиг.7а и фиг.7b.
Устройство 100 также содержит позиционный датчик 125, устройство 126 управления и датчик 134 минерального пласта. Устройство 126 присоединено к позиционному датчику 125 с помощью линии 128 управления, а к первому приводу 116 и второму приводу 118 - с помощью соответствующих линий 130, 132 управления. Кроме того, устройство 126 присоединено к датчику 134 с помощью линии 136 управления.
Позиционный датчик 125 представляет собой инерциальную систему высокой точности, задающую расположение и направление, которая специально предназначена для использования в горнодобывающем оборудовании. Указанный позиционный датчик 125 производят и продают в корпорации Honeywell Inc. под торговой маркой Horta® (Honeywell Ore Recovery/ Tunneling Aid). Прибор с торговой маркой Horta® представляет собой полностью автономный функциональный модульный эталонный узел, механизированный инерциальной навигационной системой, использующей бесплатформенные инерциальные алгоритмы, трехкольцевые лазерные гироскопы, предназначенные для распознавания углового перемещения, три-Q-флекс акселерометры, предназначенные для преобразования измерений, и специальные программные средства, предназначенные для использования в горной промышленности.
Датчик 134 предназначен, в частности, для определения верхней и нижней границы минерального пласта. Датчик 134, используемый, в частности, для указанной цели, представляет собой гамма-датчик, такой как АМЕ Model 1008 Coal Thickness Sensor, изготавливаемый и продаваемый корпорацией American Mining Electronics, Inc.
На фиг.5а - фиг.5d представлены четыре разных варианта выполнения данного изобретения. Во всех этих вариантах выполнения рулевой узел 101 присоединен между горным комбайном М и близлежащим конвейерным узлом U. В варианте выполнения, представленном на фиг.5а, в первый и второй хомуты 104, 106 вставлены крепежные кронштейны 110, 112, соединенные с рамой или бампером 150 горного комбайна М. Каждое из этих соединений осуществляют с помощью двух первых поворотных осей 113. Следует принять во внимание, что каждая ось 113 проходит по существу в горизонтальной плоскости.
В третий хомут 108 вставлен третий крепежный кронштейн 114, прикрепленный к раме или бамперу 152 конвейерного узла U. Вторая поворотная ось 115 соединяет третий хомут 108 и третий крепежный кронштейн 114. Следует отметить, что вторая ось 115 проходит в плоскости, по существу перпендикулярной той плоскости, в которой проходят первые оси 113. Таким образом, в данном варианте выполнения первые оси 113 проходят по существу в горизонтальной плоскости, в то время как вторая ось 115 проходит по существу в вертикальной плоскости.
Первый привод 116 и второй привод 118 прикреплены к раме 102 рулевого узла 101. Если говорить более конкретно, видно, что первый привод 116 прикреплен к раме 102 между первым хомутом 104 и третьим хомутом 108.
Аналогично, второй привод 118 прикреплен к раме 102 между вторым хомутом 106 и третьим хомутом 108. Таким образом, следует отметить, что два привода 116, 118 прикреплены к раме 102 рулевого узла 101 таким образом, что они разнесены в поперечном направлении и расположены по сторонам линии, проходящей от средней линии 154 горного комбайна М.
В процессе работы устройство 100 настраивает угол соединения между горным комбайном М и конвейерным узлом U, чтобы определить и настроить указанный курс горного комбайна М по мере его продвижения вперед сквозь минеральный пласт. Если говорить более конкретно, выполненные с возможностью смещения направляющие элементы 122 каждого привода 116, 118 выдвигаются вместе с головкой 124 каждого направляющего элемента, взаимодействующего с соответствующей опорной поверхностью 156 на бампере 152 конвейерного узла U. Если направляющие элементы 122 выдвинуты на половину длины их хода (то есть на 19 мм (три четверти дюйма) для цилиндра, полный ход которого составляет 38,1 мм (1,5 дюйма)), то горный комбайн М удерживается непосредственно приводами 116, 118 так, что он расположен параллельно конвейерному узлу U.
Угол соединения между горным комбайном М и конвейерным узлом U можно изменить за счет выдвижения вперед направляющего элемента 122 одного из приводов 116 или 118 и перемещения назад выполненного с возможностью смещения направляющего элемента другого привода на ту же величину. Таким образом, например, для того, чтобы повернуть направо или к верхней части изображения, представленного на фиг.5а, направляющий элемент 122 второго привода 118 выдвигают вперед на 19 мм (три четверти дюйма) (то есть на три четверти полного хода цилиндра), в то время как направляющий элемент 122 привода 116 перемещают назад на 19 мм (на три четверти дюйма). Каждый привод 116, 118 содержит гидравлический цилиндр с ходом в 38,1 мм (1,5-дюймовым ходом) и отверстием диаметром 254 мм (10-дюймовое отверстие), работающий при нагрузке до 246 кг/см2 (3500 фунтов на квадратный дюйм). Таким образом, каждый привод 116, 118 создает усилие до 1218813 Н (137 тонн). Приводы 116 или 118 могут плавно и легко изменить угол соединения между горным комбайном М и конвейерным узлом U.
Изменение угла соединения становится возможным за счет незначительного зазора, выполненного между первым хомутом 104 и первым крепежным кронштейном 110, вторым хомутом 106 и вторым крепежным кронштейном 112 и третьим хомутом 108 и третьим крепежным кронштейном 114. В представленном варианте выполнения первый и второй приводы 116, 118 позволяют менять угол соединения между горным комбайном М и конвейерным узлом U до 2,5 градусов в любую сторону от параллели Р (смотри фиг.6). Это позволяет оператору по мере продвижения вперед сквозь пласт устройства 10 удерживать его с заданной пространственной ориентацией при сохранении надлежащего размера целика между горными выработками и не допускать какого бы то ни было провала в соседнюю выработку, предотвращая вытекающее из этого возможное обрушение кровли. Это является существенным эксплуатационным преимуществом, возможно предотвращающим ремонт комбайна, поскольку такое обрушение кровли могло бы привести к оседанию комбайна под грунт, за исключением незначительного перерыва в добыче угля во время процесса восстановления.
Поворот налево или к нижней части изображения, представленного на фиг.5а, можно выполнить противоположными действиями. Таким образом, направляющий элемент 122 привода 116 можно выдвинуть вперед, в то время как направляющий элемент 122 привода 118 можно переместить назад на ту же величину, чтобы заставить горный комбайн М отклониться на 2,5 градуса влево от параллели.
Поправки, которые необходимо выполнить, чтобы сохранить соответствующий указанный курс горного комбайна М, выполняют с помощью устройства 126 управления. Если говорить более конкретно, устройство 126 получает от датчика 125, расположенного на комбайне М, информацию о реальном местоположении и о курсе. Затем устройство 126 сравнивает это реальное местоположение и данные о курсе с предварительно заданным местоположением и тем курсом, которого нужно придерживаться для сохранения надлежащего целика между горными выработками. После сравнения устройство 126 посылает сигналы управления по линиям 130, 132 управления к двум приводам 116, 118 для выполнения любой необходимой регулировки курса. Процесс является непрерывным и позволяет устройству 10 рационально и эффективно производить глубокую разработку месторождения за поверхностью F по установленному маршруту.
В то же время для обнаружения верхней и нижней границы разрабатываемого пласта постоянно работает датчик 134 минерального пласта. Указанный поток данных передается в устройство 126 по линии 136 управления. Устройство 126 реагирует на эти данные управлением процесса работы барабана D, находящегося на конце стрелы горного комбайна М. Таким образом, барабан D по мере необходимости поднимается и опускается, прорубая кровлю и основание на заданных уровнях с целью получения чистого минерала без лишнего количества пустой породы и сохраняя при этом надлежащее состояние кровли.
Следовательно, горный комбайн М может не отклоняться от пласта независимо от того, является ли основание пласта горизонтальным или наклонено вверх или вниз. Необходимый зазор или свобода движения, которые позволяют комбайну и конвейерным узлам придерживаться профиля неровностей основания и/или уклонов, обеспечивают преимущественно соединения хомута и поворотных осей, расположенные между горным комбайном М и разными конвейерными узлами U. Кроме того, головки 124, расположенные на концах направляющих элементов 122, имеют достаточное закругление по радиусу, которое позволяет комбайну М придерживаться уклонов, не влияет на работу комбайна М и направляет его по заданному курсу.
Варианты выполнения, представленные на фиг.5b, 5с и 5d, функционируют подобным образом, но существуют едва различимые отличия в сборке составных частей. В варианте выполнения, представленном на фиг.5b, рулевой узел 101 повернут относительно горного комбайна М и конвейерного узла U. Таким образом, первый и второй хомуты 104, 106 находятся во взаимодействии с крепежными кронштейнами 110, 112, прикрепленными к раме или бамперу 152 конвейерного узла U. Третий хомут 108 присоединен к третьему крепежному кронштейну 114, прикрепленному к раме или бамперу 150 горного комбайна М.
Другим отличием является то, что головки 124 приводов 116, 118 находятся во взаимодействии с опорными поверхностями 156 на бампере 150 горного комбайна М. Однако устройство 100 и приводы 116, 118 работают аналогичным способом, регулируя указанный курс комбайна М по мере его продвижения в минеральный пласт для того, чтобы сохранять надлежащий размер целика между горными выработками.
На фиг.5с представлен следующий вариант выполнения. В этом варианте выполнения первый и второй хомуты 104, 106 рулевого узла 101 присоединены к крепежным кронштейнам 110, 112, закрепленным на раме или бампере 152 конвейерного узла U. Третий хомут 108 рулевого узла 101 присоединен к крепежному кронштейну 114, закрепленному на раме или бампере 150 горного комбайна М. Дополнительным отличием является то, что первый и второй приводы 116, 118 установлены на раме или бампере 150 горного комбайна М. Головка 124 каждого привода находится во взаимодействии с опорной поверхностью 156, расположенной смежно с противоположными боковыми краями рамы 102 рулевого узла 101.
Несмотря на то, что конструкция данного варианта выполнения отличается от двух предыдущих вариантов выполнения, принципы работы остаются прежними. Если говорить более конкретно, устройство 126 реагирует на данные, полученные от позиционного датчика 125, и выдвигает вперед и перемещает назад направляющие элементы 122 приводов 116, 118 настолько, насколько это необходимо для управления курсом комбайна М и обеспечения заданного размера целика между горными выработками. Подобным образом устройство 126 реагирует на данные, полученные от датчика 134 минерального пласта, управляя барабаном D для того, чтобы не уклоняться от пласта и получать чистый минерал при сохранении надлежащих состояний кровли. Как и во всех вариантах выполнения, соединения хомута и поворотных осей допускают зазор, необходимый для регулировки курса и дающий возможность придерживаться изменений в уклонах основания пласта. Закругленные по радиусу головки 124 приводов 116, 118 преимущественно обеспечивают выполнение соответствующего и постоянного наведения в течение всего времени невзирая на уклоны основания (то есть работает ли горный комбайн, находясь в горизонтальном положении или с наклоном вверх или вниз).
Еще один вариант выполнения представлен на фиг.5b. В данном варианте выполнения первый и второй хомуты 104, 106 рулевого узла 101 присоединены к крепежным кронштейнам 110, 112, закрепленным на бампере 150 горного комбайна М. Третий хомут 108 присоединен к крепежному кронштейну 114, прикрепленному к бамперу или раме 152 конвейерного узла U. Первый и второй приводы 116, 118 прикреплены к бамперу или раме 152 конвейерного узла U. Головки 124 на направляющих элементах 122 приводов 116, 118 находятся во взаимодействии с опорными поверхностями 156, расположенными на раме 102 смежно с каждым боковым краем рулевого узла 101. К тому же, несмотря на отличия в сборке составных частей, система работает таким же образом, как описано выше, направляя горный комбайн М по оптимальному курсу в целях обеспечения рациональной и эффективной разработки минерального пласта.
Подводя итоги, можно сказать, что от внедрения принципов данного изобретения вытекают многочисленные преимущества. Устройство 10 включает новое устройство наведения или систему 100, которая с необходимой точностью направляет горный комбайн М, обеспечивая безопасную и эффективную глубокую разработку месторождения за наружной поверхностью минерального пласта. Указанная глубокая разработка преимущественно обеспечивает больший выход полезного компонента при сохранении между горными выработками целика, необходимого для поддержания вскрышного слоя грунта и предотвращения оседания. Таким образом, минимизируется вред, наносимый окружающей среде горнодобывающими работами.
Следует отметить, что устройство 10 управляется парой приводов 116, 118, которые воздействуют на опорные поверхности 156, являющиеся частью устройства для добычи полезных ископаемых. При управлении устройством 10 приводы 116, 118 не входят во взаимодействие или не контактируют с кровлей, основанием или стенками/целиками горной выработки. Таким образом, в основании не образуется колея, и не осыпается материал целиков или кровли. Следовательно, кровля или целики не нарушаются вследствие ошибок в управлении. Более того, за счет предотвращения образования колеи в основании и осыпания стенок и кровли горная выработка сохраняется свободной для работы устройства для добычи полезных ископаемых.
Более того, по существу исключена возможность прохода через целик в соседнюю горную выработку. Это значительно сокращает перспективы обрушения кровли, что могло бы вызвать провал под грунт дорогостоящего горнодобывающего оборудования. Несмотря на то, что в этой ситуации можно успешно провести ремонтные работы, производственные потери, обусловленные временем простоя горнодобывающего оборудования, оказывают чрезвычайно вредное влияние на практический результат добычи полезных ископаемых. Следовательно, устранение проблемы представляет существенный эффект, хорошо известный специалистам.
Вышеизложенное описание предпочтительных вариантов выполнения данного изобретения предложено для иллюстративных и описательных целей. Оно может не быть исчерпывающим и не ограничивает изобретение в точной указанной форме. В свете вышеизложенного возможны очевидные модификации и изменения. Например, несмотря на то, что рулевой узел изображен присоединенным между горным комбайном и соседним конвейерным узлом U, он также мог бы быть расположен между двумя соседними конвейерными узлами. Более того, рулевой узел можно было бы исключить, а приводы прикрепить непосредственно к одному узлу несмотря на то, что головки приводов находятся во взаимодействии с соответствующими опорными поверхностями, расположенными на соседнем узле.
Варианты выполнения были выбраны и описаны с целью наилучшей иллюстрации принципов изобретения и его практического применения, чтобы таким образом любой специалист мог использовать изобретение в разных вариантах выполнения и с различными модификациями, которые соответствуют рассмотренному конкретному назначению. Все подобные модификации и изменения находятся в пределах объема данного изобретения, определенного прилагаемой формулой изобретения, если они изложены в соответствии с объемом защиты прав и при этом объективны, законны и правильно озаглавлены. Чертежи и предпочтительные варианты выполнения не ограничивают общий смысл формулы изобретения и в любом случае не являются четким и полным их истолкованием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ С УЗКОЙ БЕРМОЙ | 2006 |
|
RU2395689C2 |
| СПОСОБ НЕПРЕРЫВНОЙ ВЫЕМКИ АГРЕГАТНОГО МАТЕРИАЛА ИЗ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2123600C1 |
| СПОСОБ РАЗРАБОТКИ МОЩНОГО ПОЛОГОГО УГОЛЬНОГО ПЛАСТА | 1997 |
|
RU2122115C1 |
| СПОСОБ СЕЛЕКТИВНОЙ ВЫЕМКИ УГОЛЬНОГО ПЛАСТА | 2009 |
|
RU2392433C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДОБЫЧИ УГЛЯ НА ПЛАСТАХ КРУТОГО ЗАЛЕГАНИЯ ПРИ ОТКРЫТЫХ ГОРНЫХ РАБОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2553723C1 |
| СПОСОБ РАЗРАБОТКИ КРУТОЗАЛЕГАЮЩИХ УГОЛЬНЫХ ПЛАСТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2553719C1 |
| СИСТЕМА РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ | 2003 |
|
RU2344291C2 |
| УПРАВЛЕНИЕ ПО НЕСКОЛЬКИМ АЗИМУТАМ ВЕРТИКАЛЬНЫМИ ТРЕЩИНАМИ, ВОЗНИКАЮЩИМИ ПРИ ГИДРАВЛИЧЕСКИХ РАЗРЫВАХ В РЫХЛЫХ ИЛИ СЛАБОСЦЕМЕНТИРОВАННЫХ ОСАДОЧНЫХ ПОРОДАХ | 2004 |
|
RU2359115C2 |
| КРОВЕЛЬНЫЕ ОПОРЫ ДЛЯ СПЛОШНОЙ ВЫЕМКИ | 2010 |
|
RU2544345C2 |
| СПОСОБ РАЗРАБОТКИ ПОЛОГОГО УГОЛЬНОГО ПЛАСТА | 1999 |
|
RU2151870C1 |
Изобретение относится к области горного дела, в частности к навигационной системе горного комбайна, предназначенного для работы в уступе карьера. Технический результат - точное вождение комбайна для увеличения интенсивности выемки угля из зоны добычи. Устройство для добычи полезных ископаемых содержит комбайн, конвейерный узел и рулевой узел, соединяющий комбайн и конвейерный узел. Кроме того, устройство содержит датчик курса и устройство управления, реагирующее на датчик курса. Первый привод расположен на комбайне, на конвейерном узле или на рулевом узле. Первый привод помещен с одной стороны от средней линии комбайна. Кроме того, либо на комбайне, либо на конвейерном узле, либо на рулевом узле расположен второй привод. Второй привод помещен с другой, противоположной стороны от средней линии комбайна. Первый и второй приводы используются для регулировки угла соединения между комбайном и конвейерным узлом по любую сторону параллели для того, чтобы поддерживать заданное направление проходки для комбайна. 4 н. и 18 з.п. ф-лы, 8 ил.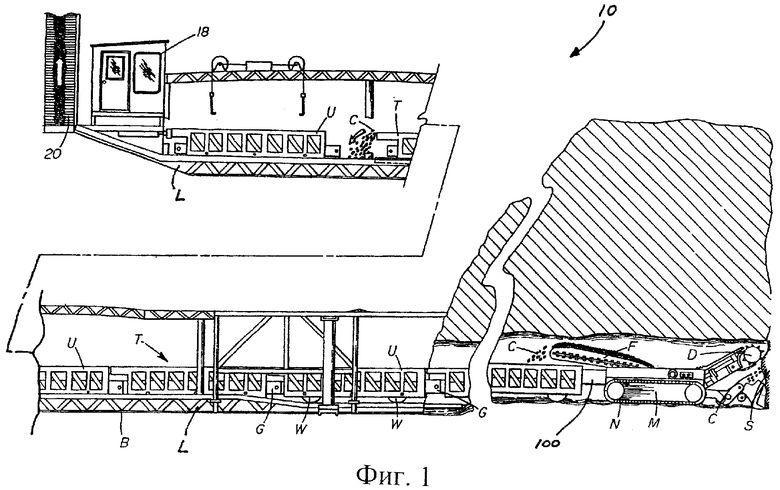
Приоритет по пунктам:
| Устройство для соединения проходческого комбайна с конвейером | 1987 |
|
SU1476141A1 |
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ КУРСА | 0 |
|
SU337510A1 |
| US 4773520 A, 27.09.1988 | |||
| US 4884847 A, 05.12.1989 | |||
| US 5112111 A, 12.05.1992 | |||
| US 5232269 A, 03.08.1993 | |||
| US 5261729 A, 16.11.1993 | |||
| US 5364171 A, 15.11.1994 | |||
| US 5522647 A, 04.06.1996. | |||

