Известны устройства для стабилизации курса проходческого комбайна Включающие задатчИк направления, соединенный с комбайном нитью сумматор, датчик углового отклонения и измеритель отклонения.
Предлагаемое устройство отличается тем, что измеритель смещения выполнен в виде Взаимодействующего с нитью маятника с грайитацион.ным датчиком.
Это повышает точность регулирования направления движения комбайна.
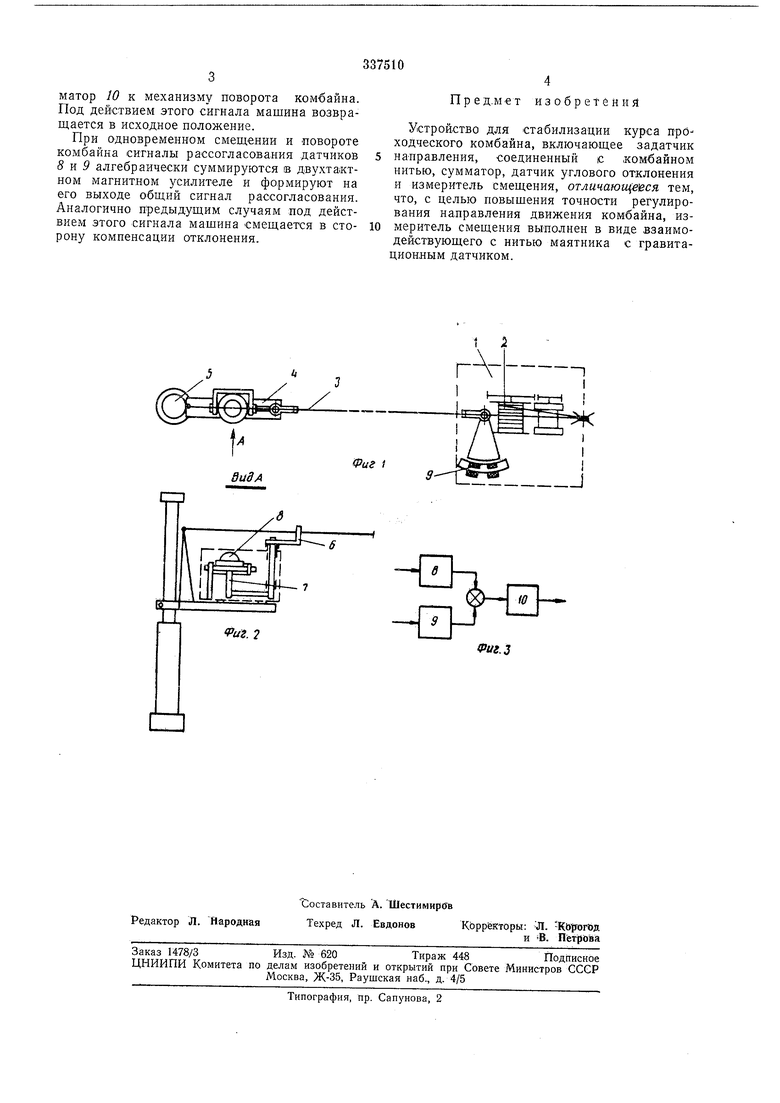
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - вид по стрелке Л на фиг. 1; на фиг. 3 - функциональная схема.
Устройство включает установленную на комбайне I лебедку 2, на которую намотана нить 3, задатчик направления 4, закрепленный на стойке 5. На одном конце задатчика укреплена нить, а «на - рычажная передача 6, передающая действие нити на маятник 7, на котором закреплен гравитационный датчик 8. На комбайне 1 размещен датчик 9 углового отклонения.
Выходные цепи датчиков 5 и 5 линейного и углового отклонения комбайна относительно задатчика направления 4 включаются на выходе сумматора 10 (см. фиг. 3), формирующего общий сигнал рассогласования. Этот сигнал подается механизмом поворота комбайна.
Описанное устройство работает следующим образом. При нормальном положении комбайна нить 3 совпадает с осью задатчика направления 4. Благодаря этому рычажная передача 6 и маятник занимают нейтральное положение. Сигнал на выходе гравитационного датчика 8 равен нулю. В этом случае нулю равен также и сигнал на выходе датчика 9 углового отклонения.
10
При смещении комбайна от заданного направления нарущается соосность нити с осью задатчика направления. Вследствие этого маятник вместе с гравитационным датчиком
с помощью рычажной передачи 6 наклоняются относительно вертикальной оси. На выходе гравитационного датчика появляется сигнал рассогласования, пропорциональный смещению контролируемой точки комбайна относительно заданного направления. Этот сигнал подается в сумматор 10 (двухтактный магнитный усилитель) и далее к механизму поворота комбайна. Под действием этого сигнала комбайн начинает смещаться в сторону компенсации отклонения .
При повороте комбайна относительно заданного направления между нитью 3 и комбайном образуется угол, который измеряется датчиком 9 углового отклонения и в виде
матор 10 к механизму поворота комбайна. Под действием этого сигнала машина возвращается в исходное положение.
При одновременном смещении и повороте комбайна сигналы рассогласования датчиков S и 9 алгебраически суммируются в двухтактном магнитном усилителе и формируют на его выходе общий сигнал рассогласования. Аналогично предыдущим случаям под действием этого сигнала машина смещается в сторону компенсации отклонения.
Пред.мет изобретений
Устройство для стабилизации курса проходческого комбайна, включающее задатчик направления, соединенный с комбайном нитью, сумматор, датчик углового отклонения и измеритель смещения, отличающееся тем, что, с целью повышения точности регулирования налравления движения комбайна, измеритель смещения выполнен в виде взаимодействующего с нитью маятника с гравитационным датчиком.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КУРСА ПРОХОДЧЕСКОГО КОМБАЙНАессооюгнАЯ^0тшгг;гкдйг 'Л-' | 1970 |
|
SU281354A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МОБИЛЬНЫХ АГРЕГАТОВ | 2001 |
|
RU2224396C2 |
| Гравитационный вариометр | 1976 |
|
SU557341A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| Устройство для автоматического управления движением проходческого комбайна по заданному курсу | 1985 |
|
SU1317122A1 |
| Гироскопическое устройство для проходческой машины | 1980 |
|
SU892211A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| Способ управления стреловым исполнительным органом горнопроходческого комбайна | 1985 |
|
SU1285149A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
1
iPoz.S
