Изобретение относится к железнодорожному транспорту и может быть использовано в системах съема информации с подвижного состава для опознавания подвижных транспортных средств и автоматизированного учета грузовых перевозок железнодорожным транспортом.
Из уровня техники известна система идентификации подвижных объектов, содержащая считыватель, установленный в пункте считывания и включающий приемопередающую антенну и датчик, в котором записана информация об объекте идентификации, датчик установлен на подвижной железнодорожной единице и состоит из антенны, соединенной с модулятором, и запоминающего устройства (RU 2222030 С2, G01S 13/82).
Недостатком кодового датчика, используемого в указанной системе идентификации подвижных объектов, является отсутствие возможности оперативного контроля состояния перевозимых данным подвижным составом грузов и ответственных узлов его подвижных единиц.
В качестве прототипа принят кодовый бортовой датчик, используемый в автоматизированной системе съема информации с подвижного состава. Кодовый бортовой датчик размещают непосредственно на каждой единице подвижного состава и, по крайней мере, две электронных метки по одной на каждом из двух запорно-пломбировочных устройств каждой единицы подвижного состава. Считывание информации осуществляется по СВЧ-каналу, при этом устройство считывания содержит первую приемопередающую антенну для считывания информации с кодового бортового датчика на частоте f1, вторую и третью приемопередающие антенны для считывания информации с электронных меток на частоте f2, при этом вторая приемопередающая антенна выполнена с возможностью формирования и приема сигналов с горизонтальной плоскостью поляризации, а третья - с вертикальной плоскостью поляризации для считывания информации соответственно с первой и второй электронных меток, выполненных с возможностью приема и передачи сигналов соответственно с горизонтальной и вертикальной плоскостями поляризации. В частных случаях выполнения системы расстояние между электронными метками выбирают не менее 0,6 м, кодовый бортовой датчик и электронные метки располагают на различных высотах относительно уровня головки рельса и на различных расстояниях друг от друга, кодовый бортовой датчик располагают на раме вагона и/или контейнере, электронные метки располагают на дверях крытого вагона с двух сторон вагона или на крышке загрузочного люка цистерны или на дверях контейнера, которые расположены с торца контейнера или на штурвалах открытия крышек бункеров хоппер-дозатора (RU 2185986 C1, B61L 25/02).
Указанная система труднореализуема на практике с достижением заявленного результата, заключающегося в повышение качества и оперативности контроля перемещения подвижного состава и грузовых перевозок. Действительно, наличие одновременно излучающих антенн в известном техническом решении вызывает взаимное влияние на кодовые датчики и электронные метки, исключающее надежное (без сбоев) считывание. Например, кодовый датчик на частоте 890-900 МГц в процессе движения при наклонном направлении излучения антенны на 2,4 ГГц будет считываться ею и декодироваться ее каналом, внося ошибки. Габариты антенн при достаточно малой зоне считывания приведут к взаимному искажению их диаграмм направленности и взаимному влиянию на качество считывания.
Предлагаемое изобретение лишено указанных недостатков, т.к. базируется на топологии традиционных RFID систем с отражением излучения от одного кодового датчика с одной облучающей и считывающей аппаратурой (антенна + считыватель) и решение указанной выше задачи реализовано за счет схемных решений самого датчика и введением внешних контрольных запорно-пломбировочных узлов с одновременной их идентификацией контролируемым датчиком.
Технический результат изобретения заключается в устранении указанных недостатков, а именно: в повышение точности и оперативности контроля перемещения подвижного состава и грузовых перевозок.
Технический результат достигается тем, что в кодовый бортовой датчик для автоматизированной системы съема информации с подвижного состава, содержащий приемно-передающую антенну и функциональный преобразователь кода с блоком памяти, введены согласующий трансформатор, выпрямитель с функцией удвоения выходного напряжения, автономный источник питания кодового бортового датчика, стабилизатор напряжения, датчики параметров основных узлов и грузов подвижной единицы и делители напряжения, в каждом делителе напряжения одно из плеч снабжено контактами для подключения шлейфа с резистором, при этом в качестве функционального преобразователя кода использован микроконтроллер, содержащий генератор тактовых импульсов, оперативное запоминающее устройство, многоканальный аналого-цифровой преобразователь, перепрограммируемый источник постоянного тока, энергонезависимый блок памяти с записанным в нем идентификационным кодом подвижной единицы и кодами состояния основных узлов и грузов подвижной единицы, приемно-передающая антенна через согласующий трансформатор соединена с входом выпрямителя с функцией удвоения выходного напряжения, выход которого непосредственно соединен с первым последовательным входом/выходом микроконтроллера, являющимся выходом формирователя импульсной последовательности идентификационного кода, а через развязывающий диод выход выпрямителя соединен с нагрузочным резистором и со вторым последовательным входом/выходом микроконтроллера, являющимся входом управления запуском и перепрограммированием микроконтроллера, третий последовательный вход/выход микроконтроллера, являющийся выходом источника постоянного уровня напряжения, соединен с шиной питания датчиков параметров основных узлов и грузов подвижной единицы и со стабилизатором напряжения, выход которого соединен с входом опорного напряжения питания многоканального аналого-цифрового преобразователя микроконтроллера и группой делителей напряжения, средние выводы которых и выходы датчиков параметров основных узлов подвижной единицы подключены к соответствующим входам многоканального аналого-цифрового преобразователя микроконтроллера, к четвертому последовательному входу/выходу микроконтроллера, являющемуся входом/выходом перепрограммируемого источника постоянного тока микроконтроллера, подключен конденсатор для периодического запуска микроконтроллера.
В частности, приемно-передающая антенна может быть выполнена полосковой в виде полуволнового линейного вибратора. В качестве согласующего трансформатора может быть использован четвертьволновый согласующий трансформатор. В делителях напряжения могут быть использованы прецизионные резисторы.
На чертеже представлена схема кодового бортового датчика для автоматизированной системы съема информации с подвижного состава.
Кодовый бортовой датчик для автоматизированной системы съема информации с подвижного состава содержит приемно-передающую антенну 1, которая выполнена полосковой в виде полуволнового линейного вибратора, приемно-передающая антенна 1 через согласующий трансформатор 2 соединена с входом выпрямителя 3 с функцией удвоения выходного напряжения, выход которого непосредственно соединен с первым последовательным входом/выходом микроконтроллера 12, являющимся выходом формирователя импульсной последовательности идентификационного кода, а через развязывающий диод 4 выход выпрямителя 3 соединен с нагрузочным резистором 5 и со вторым последовательным входом/выходом микроконтроллера 12, являющимся входом управления запуском и перепрограммированием микроконтроллера, автономный источник 6 питания предназначен для питания кодового бортового датчика, третий последовательный вход/выход микроконтроллера 12, являющийся выходом источника постоянного уровня напряжения, соединен с шиной питания датчиков 25 параметров основных узлов и грузов подвижной единицы и со стабилизатором 7 напряжения, выход которого соединен с входом опорного напряжения питания многоканального аналого-цифрового преобразователя 13 микроконтроллера 12 и группой делителей напряжения, средние выводы которых и выходы датчиков 25 параметров основных узлов подвижной единицы подключены к соответствующим входам многоканального аналого-цифрового преобразователя 13 микроконтроллера 12, в каждом делителе напряжения одно из плеч представляет собой прецизионный резистор 8 (9, 10), а другое плечо снабжено контактами для подключения шлейфа с резистором 26 (27, 28), микроконтроллер содержит генератор 17 тактовых импульсов, оперативное запоминающее устройство 16, многоканальный аналого-цифровой преобразователь 13, перепрограммируемый источник 18 постоянного тока, энергонезависимый блок 15 памяти, с записанным в нем идентификационным кодом подвижной единицы и кодами состояния основных узлов и грузов подвижной единицы, к четвертому последовательному входу/выходу микроконтроллера 12, являющемуся входом/выходом перепрограммируемого источника постоянного тока микроконтроллера, подключен конденсатор 11 для периодического запуска микроконтроллера. Управление в микроконтроллере осуществляет модуль управления 14 с памятью управляющей программы.
В частном случае исполнения кодового бортового датчика первое плечо 19 приемно-передающей антенны 1 подключено к входу четвертьволнового согласующего трансформатора 2, выход которого подключен к катоду первого диода 20 и аноду второго диода 21 выпрямителя 3, катод второго диода 21 выпрямителя 3 подсоединен к первому выводу второго конденсатора 23 выпрямителя 3, первому последовательному входу/выходу микроконтроллера 12 и к аноду развязывающего диода 4, катод которого подключен ко второму последовательному входу/выходу микроконтроллера 12 и первому выводу нагрузочного резистора 5 выпрямителя, второй вывод которого подключен к общей шине кодового бортового датчика, анод первого диода 20 выпрямителя 3 также подсоединен к общей шине кодового бортового датчика, к которой подключены общая шина микроконтроллера 12, общая шина стабилизатора напряжения 7, минусовый вывод автономного источника 6 питания, второй вывод конденсатора 11 для периодического запуска микроконтроллера, и к первому выводу первого конденсатора 22, второй вывод которого подключен ко второму выводу второго конденсатора 23 и второму плечу 24 приемно-передающей антенны 1.
Кодовый бортовой датчик для автоматизированной системы съема информации с подвижного состава работает следующим образом.
Кодовый бортовой датчик может быть реализован на базе ИМС PIC 12F683.
При подключении автономного источника 6 питания и отсутствии напряжения высокочастотной накачки микроконтроллер 12 опрашивает периферийные устройства (например, запорно-пломбировочные устройства (ЗПУ), в каждое из которых включен один из шлейфов кодового датчика с внешним резистором 8 (9, 10) и вскрытие которого приводит к изменению состояния сопротивления этого шлейфового узла, а также датчики (25) параметров основных узлов подвижной единицы, такие как температурный датчик буксового узла колесной оси, датчик скорости вращения колеса и т п.), обнаруживает низкий уровень сигнала на своем втором последовательном входе и программно инициирует установку высокого потенциала на входе подключения конденсатора 11. При достижении единичного уровня напряжения на конденсаторе 11 (ток заряда ˜25 мА) микроконтроллер 12 переходит в режим «sleep» - ультрамалого потребления тока батареи. При этом источник 18 постоянного тока микроконтроллера 12 начинает разряжать конденсатор 11 током 0,2 мкА. При разряде конденсатора 11 до нулевого уровня сигнала микроконтроллера (˜0,5 В) микроконтроллер 12 входит в рабочий режим, устанавливает высокий уровень питания на третьем последовательном входе/выходе, при котором осуществляется питание датчиков 25 параметров основных узлов подвижной единицы и стабилизатора 7 напряжения, опрашивает периферийные устройства (запорно-пломбировочные устройства (ЗПУ), в каждое из которых включен один из шлейфов кодового датчика с внешним резистором, а также датчики параметров основных узлов подвижной единицы) по входам многоканального аналого-цифрового преобразователя 13 и вносит изменения в идентификационный код кодового бортового датчика и вновь инициирует установку высокого потенциала на входе подключения конденсатора 11, при достижении которого переходит в режим ультранизкого потребления. Далее процесс работы микроконтроллера 12 повторяется.
При входе кодового бортового датчика в поле облучения считывающего устройства (не показано) и достижении на втором последовательном входе/выходе микроконтроллера 12 (выходе выпрямителя) уровня включения микроконтроллера 12 запускается программа микроконтроллера, из тактовой частоты генератора 17 тактовых импульсов микроконтроллера программным делителем формируется тактовая частота кода кодового бортового датчика, идентификационный код из энергонезависимого блока 15 памяти пересылается в оперативное запоминающее устройство 16, единицы и нули идентификационного кода преобразуются в байты кода:
- для единицы - 10101100,
- для нуля - 11001010
и для маркера кода
- 1010101010101100 с последующим преобразованием двоичного кода с помощью тактовой частоты кода кодового бортового датчика в импульсную последовательность последовательного импульсного временного идентификационного кода. Эта импульсная последовательность поступает на первый последовательный вход/выход микроконтроллера 12, потенциал которого определяет ток через выпрямитель 3.
Изменение величины тока нагрузки выпрямителя 3 меняет условие согласования антенны с нагрузкой, и в результате меняется доля отраженной ею мощности СВЧ. Таким образом, мощность отраженного сигнала модулируется в соответствии с импульсной последовательностью идентификационного кода кодового бортового датчика. Считывающее устройство принимает отраженный промодулированный СВЧ-сигнал, демодулирует его, выделяя импульсную последовательность идентификационного кода, преобразует его в двоичный эквивалент и выдает сообщение о подвижной единице и состоянии основных узлов и грузов подвижной единицы.
При выходе из зоны облучения кодовый бортовой датчик переходит в режим периодического перезаряда конденсатора 11.
Величина конденсатора 11 выбирается из условия: C=IT/U, где Т - период разряда конденсатора, равен, например, двум секундам, I - ток разряда, равен 0,2 мкА, а U - перепад напряжения от единичного до нулевого уровня сигналов на конденсаторе.
С=0,15 мкФ.
Время заряда конденсатора максимальным током микроконтроллера 25 мА составит
2,4=3(1-е-t/τ)
t=1,6CR=1,6·0,12·0,15=30 мкс, где R - сопротивление перехода сток-исток ключевого транзистора микроконтроллера.
Таким образом, при отсутствии внешнего облучения потребление от автономного источника 6 питания кодового бортового датчика происходит током 0,2 мкА.
Время воздействия облучения за 24 часа при плотности пунктов считывания 2 на 50 км (вход и выход станции) составит 17 с с потреблением от батареи 0,2 мА (штатный режим работы микроконтроллера).
Практически автономный источник 6 питания (батарея) кодового бортового датчика работает в режиме потребления 0,2 мкА, что при емкости, например, в 50 мА/час составит не менее 10 лет работы кодового бортового датчика.
При 10-разрядном многоканальном аналого-цифровом преобразователе 13 точность измерения напряжения делителя шлейфа обеспечит контроль сопротивления шлейфа при его и прецизионного резистора номинале в 10 кОм с точностью в 30 Ом, что практически исключает возможность разрыва цепи шлейфа имитацией его целостности с помощью параллельного включения внешнего резистора.
Отличительной особенностью изобретения является переход на идентификацию основных узлов и грузов подвижной железнодорожной единицы с помощью шлейфовых устройств, подключаемых к кодовому бортовому датчику, что обеспечивает:
- использование для контроля состояния коммерческих грузовых перевозок существующих систем автоматической идентификации с отражением ультравысокого излучения, соответствующих международному стандарту ISO 10374, без введения дополнительных электронных меток и устройств считывания, снижающих надежность считывания идентификационной информации из-за взаимного влияния излучения;
- возможность встраивания оконечных элементов шлейфовых устройств в стандартные пломбировочно-запорные устройства;
- продолжительный срок эксплуатации кодового бортового датчика на уровне пассивной метки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И МЕТКА (ВАРИАНТЫ) ДИСТАНЦИОННОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408026C1 |
| СИСТЕМА ДИСТАНЦИОННОГО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ И ИХ УЗЛОВ | 2013 |
|
RU2551132C1 |
| ПЕРЕНОСНОЕ СЧИТЫВАЮЩЕЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ СООТВЕТСТВИЯ ИНФОРМАЦИИ О НОМЕРЕ ВАГОНА (КОНТЕЙНЕРА) ИЛИ ДРУГОЙ ПОДВИЖНОЙ ЕДИНИЦЫ, НАНЕСЕННОЙ НА ЕЕ БОРТУ, С ИНФОРМАЦИЕЙ, ЗАНЕСЕННОЙ В КОДОВЫЙ БОРТОВОЙ ДАТЧИК | 2002 |
|
RU2197402C1 |
| СИСТЕМА ДИСТАНЦИОННОГО СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ И ИХ УЗЛОВ | 2004 |
|
RU2291468C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2011 |
|
RU2454717C1 |
| РЕОАНАЛИЗАТОР | 1994 |
|
RU2079284C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЧИТЫВАНИЯ ИДЕНТИФИКАЦИОННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2320510C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| Устройство для контроля проследования поезда в полном составе | 2019 |
|
RU2702370C1 |
Кодовый бортовой датчик предназначен для использования в железнодорожном транспорте, в системах съема информации с подвижного состава для опознавания подвижных транспортных средств и автоматизированного учета грузовых перевозок железнодорожным транспортом. Кодовый бортовой датчик содержит приемно-передающую антенну (1), которая через согласующий трансформатор (2) соединена с входом выпрямителя (3) с функцией удвоения выходного напряжения, выход которого непосредственно соединен с первым последовательным входом/выходом микроконтроллера (12). В состав микроконтроллера (12) входит энергонезависимый блок памяти (15) с записанным в нем идентификационным кодом подвижной единицы и кодами состояния основных узлов и грузов подвижной единицы, к четвертому последовательному входу/выходу микроконтроллера подключен конденсатор для периодического запуска микроконтроллера (12). Управление микроконтроллером (12) осуществляет модуль управления (14) с памятью управляющей программы, входящий в состав микроконтроллера (12). Приемно-передающая антенна (1) может быть выполнена полосковой в виде полуволнового линейного вибратора. В качестве согласующего трансформатора (2) может быть использован четвертьволновый согласующий трансформатор. Техническим результатом является повышение точности и оперативности контроля перемещения подвижного состава и грузовых перевозок. 3 з.п. ф-лы, 1 ил.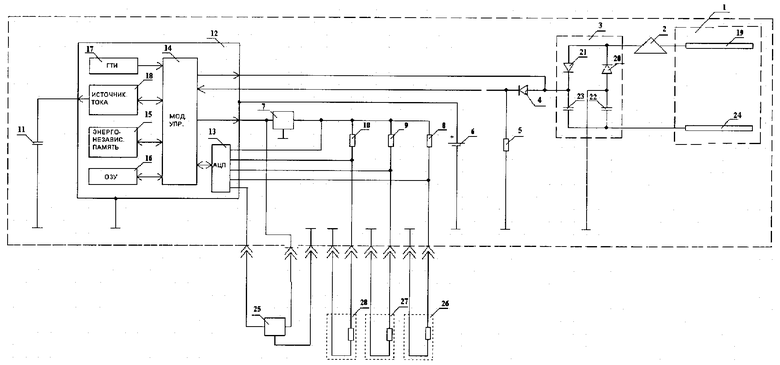
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЪЕМА ИНФОРМАЦИИ С ПОДВИЖНОГО СОСТАВА | 2001 |
|
RU2185986C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2001 |
|
RU2222030C2 |
| ПОЛУПАССИВНЫЙ КОДОВЫЙ ДАТЧИК ИДЕНТИФИКАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2216752C2 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН, В УСТАНОВКАХ ДЛЯ РАЗДЕЛЕНИЯ ИХ НА КРИСТАЛЛЫ | 1991 |
|
RU2047933C1 |

