Область техники
Данное техническое решение относится к цифровой вычислительной технике, а именно к цифровым вычислительным системам для обработки радиолокационной информации, и может быть использовано в пунктах управления воздушным движением для обеспечения автоматизированного съема координат воздушных объектов (ВО) при работе с аналоговыми радиолокационными станциями (РЛС) и сопровождения трасс ВО по данным РЛС и взаимодействующих пунктов управления.
Уровень техники
Известны аналогичный аппаратно-программный комплекс подвижного пункта управления ПУ-12М (изделие 9С482М) (см., например, С.И. Петухов, И.В. Шестов "История создания и развития вооружения и военной техники ПВО Сухопутных Войск России", издательство "ВПК", Москва, 1998 г., часть I, стр. 263-264) и подвижный пункт обработки радиолокационной информации ПОРИ-П2 (изделие 9С467-2) (см. там же, часть I, стр. 164-169).
Аппаратура этих изделий обеспечивает сопряжение с аналоговыми радиолокационными станциями (РЛС) различных типов, ручной ввод координат воздушных объектов (ВО), постановку ВО на сопровождение и обмен данными радиолокационной обстановки со взаимодействующими объектами по телекодовым линиям связи.
Наиболее близким аналогом (прототипом) заявляемого технического решения является аппаратно-программный комплекс подвижного пункта управления ПУ-12М (изделие 9С482М).
В состав аппаратно-программного комплекса изделия ПУ-12М входят: вычислитель (электронная вычислительная машина (ЭВМ) с жесткой программой), к входам которого подключены два телекодовых приемника данных о ВО, принимающих информацию от вышестоящего и взаимодействующего пункта управления (ПУ), два телепередатчика, датчик координат топопривязки изделия, на вход которого поступают сигналы приращения координат Хтп, Yтп от курсопрокладчика, пульт управления и ввода характеристик целей, ручной манипулятор - датчик координат маркера индикатора кругового обзора (ИКО) и блок сельсин-приемников, подключаемый к сельсин-датчикам азимутального положения антенны радиолокационной станции.
К выходу ЭВМ подключен вход адаптера ИКО, преобразующий поступающие на него коды в напряжения координат и импульсы подсвета для формирования на экране ИКО вторичной воздушной обстановки.
На второй вход адаптера ИКО с блока сельсин-приемников поступают пилообразные напряжения, пропорциональные синусу и косинусу текущего азимута антенны РЛС.
С выходов адаптера на координатные входы ИКО поступают напряжения развертки, координат целей и векторов скорости, а на входы подсветов - подсветы вторичных отметок целей, их характеристик, векторов. На вторые входы подсветов ИКО поступают сигналы подсвета ЭХО и сигнала общего опознавания от РЛС, создавая на экране ИКО совмещенную первичную и вторичную радиолокационную обстановку.
При работе на стоянке ПУ-12М подключается комплектом кабелей к аналоговой РЛС (типа П15, П19, П40 и др.). Сигналы подсвета ЭХО РЛС подключаются непосредственно ко входу ИКО, напряжения развертки по координатам X, У поступают на ИКО с адаптера ИКО.
Таким же образом сопрягается с РЛС и ПОРИ-П2.
Недостатками известного технического решения являются:
отсутствие автоматического ввода координат ВО в ЭВМ;
низкая производительность и низкая точность ручного ввода координат ВО. Оператор может сопровождать не более 3-5 трасс, т.к. он производит визуальный поиск целей на экране ИКО и вводит координаты целей в ЭВМ вручную, совмещая маркер с первичными отметками на экране ИКО;
необходимость использования для сопряжения с РЛС многожильных (два кабеля) и высокочастотных кабелей (3-4 кабеля) длиной 150-300 м;
недостаточное число каналов приема телекодовой информации;
большой объем аппаратуры из-за использования одноканальных блоков аппаратуры передачи данных (АПД) "Иртыш", что не позволяет разместить необходимое количество аппаратуры в передвижных пунктах управления воздушным движением;
сложность подключения АПД "Иртыш" к ЭВМ, т.к. блоки Т235-1Л АПД "Иртыш" имеют несовместимый с IBM PC параллельный интерфейс и для подключения к ЭВМ требуются специальные адаптеры.
Сущность изобретения
Известное автоматизированное рабочее место оператора управления воздушным движением состоит из специализированной электронной вычислительной машины (ЭВМ), совместимой с IBM PC, содержащей системный блок с набором стандартных модулей, монитор, клавиатуру, шаровой манипулятор, а также дополнительные модуль математического акселератора (МА), модуль адаптера локальной вычислительной сети (ЛВС), модуль сопряжения с танковой навигационной аппаратурой (ТНА) и каналом связи автоматизированной системы передачи данных (АСПД-У), первые входы-выходы которых соединены с шиной ISA системного блока специализированной ЭВМ, а вторые входы модуля адаптера локальной вычислительной сети с первыми входами-выходами устройства, вход, второй и третий входы-выходы модуля сопряжения с ТНА и АСПД-У соединены соответственно с первым входом и вторым и третьим входами-выходами устройства, многоканальной аппаратуры передачи данных (МАПД), первый вход-выход которой соединен с входом-выходом RS-232C системного блока специализированной ЭВМ, а вторые входы-выходы с четвертыми входами-выходами устройства, модуль адаптера телеграфного канала, первый вход-выход которого соединен с входом-выходом RS-232C системного блока специализированной ЭВМ, а второй вход-выход с четвертыми входами-выходами устройства.
Целью настоящего технического решения является:
обеспечение автоматического ввода координат воздушных объектов от удаленных аналоговых радиолокационных станций (РЛС) или передвижных радиовысотомеров (ПРВ);
сокращение количества (объема) кабелей сопряжения;
сокращение объема аппаратуры передачи данных при увеличении количества каналов приема и передачи данных.
Для получения данного технического результата известное автоматизированное рабочее место дополнительно содержит первый и второй выносные блоки сопряжения с радиолокационной станцией (РЛС) и передвижным радиовысотомером (ПРВ), входы которых соединены соответственно с пятым и шестым входами устройства, модуль сопряжения с выносными блоками, первый вход-выход которого соединен со вторым входом-выходом модуля математического акселератора, а второй и третий вход-выход с входами-выходами соответственно первого и второго выносных блоков сопряжения с радиолокационной станцией.
Выносной блок сопряжения с радиолокационной станцией содержит первый фильтр низких частот, вход которого соединен с входом ЭХО от радиолокационной станции, дифференциальный усилитель, два входа которого соединены соответственно с выходом первого фильтра низких частот и входом ЭХО от радиолокационной станции, аналого-цифровой преобразователь сигнала ЭХО, вход которого соединен с выходом дифференциального усилителя, цифровой фильтр, вход которого соединен с выходом аналого-цифрового преобразователя сигнала ЭХО, компаратор, два входа которого соединены соответственно с входами ОПОЗНАНИЕ и U отсечки от радиолокационной станции, генератор эталонной частоты, счетчик СчD1 дистанции РЛС, два входа которого соединены соответственно с выходом генератора эталонной частоты и с входом ИЗ от радиолокационной станции, счетчик СчD2 дистанции передатчика, первый вход которого соединен с входом ИЗ от радиолокационной станции, генератор опорного напряжения, выход которого соединен с выходом U опорное радиолокационной станции, первый сдвиговый регистр, первый регистр состояния, выход которого соединен с первым входом первого сдвигового регистра, преобразователь угол-код напряжений грубого отсчета (ГО) и точного отсчета (ТО) в код азимута (АДП-А), два входа которого соединены соответственно с выходом генератора опорного напряжения и входом ГО, ТО от радиолокационной станции, а выход с первым входом первого сдвигового регистра, аналого-цифровой преобразователь (АЦП СУМ) синуса угла места, два входа которого соединены соответственно с выходом генератора опорного напряжения и входом sin ε от радиолокационной станции, а выход с первым входом первого сдвигового регистра, первое двухпортовое оперативное запоминающее устройство, четыре входа которого соединены соответственно с выходом цифрового фильтра, компаратора, счетчика дистанции C4D1 РЛС и счетчика дистанции СчD2 передатчика, первый передатчик (ПРД1), два входа которого соединены соответственно с выходом первого двухпортового оперативного запоминающего устройства и первого сдвигового регистра, а первый выход соединен со вторыми входами счетчика СчD2 дистанции передатчика и первого сдвигового регистра, первый выходной линейный трансформатор, вход которого соединен с выходом первого передатчика (ПРД1), а выход с входом модуля сопряжения с выносными блоками, первый входной линейный трансформатор, вход которого соединен с выходом модуля сопряжения с выносными блоками, первый приемник, входы которого соединены с выходом первого входного линейного трансформатора, регистр установки азимута (РгУА) ПРВ, вход которого соединен с выходом первого приемника, регистр команд (РгК), вход которого соединен с выходом первого приемника, сумматор (СМД), два входа которого соединены соответственно с выходом преобразователя угол-код (АЦП-А) напряжений ГО и ТО в код азимута и регистра установки азимута, первый цифроаналоговый преобразователь (ЦАП1) кода рассогласования азимута, вход которого соединен с выходом сумматора (СМА), усилитель мощности, вход которого соединен с выходом первого цифроаналогового преобразователя, а выход с входом δβ на ПРВ, блок реле, вход которого соединен с выходом регистра команд (РгК), а выход с входом Режим НРЗ на наземный радиозапросчик (НРЗ).
Модуль сопряжения с выносными блоками в каждом из двух каналов содержит второй входной линейный трансформатор (ВхТ2), вход которого соединен с выходом (МК) выносного блока, второй приемник, вход которого соединен с выходом второго входного линейного трансформатора, второй сдвиговый регистр, первый и второй входы которого соединены соответственно с первым и вторым выходами второго приемника, счетчик дальности, вход которого соединен со вторым выходом второго сдвигового регистра, второе оперативное запоминающее устройство, два первых входа которого соединены соответственно с выходом счетчика дальности и первым выходом второго приемника, сумматор количества отметок, два входа которого соединены соответственно с первым выходом второго приемника и выходом второго оперативного запоминающего устройства, а выход с третьим входом второго оперативного запоминающего устройства, схему управления, вход которой соединен с выходом сумматора количества отметок, а первый выход с входом модуля математического акселератора, выходной мультиплексор, пять входов которого соединены соответственно с выходами второго сдвигового регистра, счетчика дальности, сумматора количества отметок, вторым и третьим выходами схемы управления, а выход с входом модуля математического акселератора, регистр передачи команд, два входа которого соединены с входами Запись команды и Данные модуля математического акселератора, регистр передачи азимута, два входа которого соединены с входами Данные и Запись азимута модуля математического акселератора, второй передатчик, вход которого соединен с выходами регистра передачи команд и регистра передачи азимута, второй выходной линейный трансформатор, вход которого соединен с выходом второго передатчика, а выход с входом мультиплексного канала выносного блока сопряжения с радиолокационной станцией.
На фиг.1 приведена структурная схема автоматизированного рабочего места оператора управления воздушным движением.
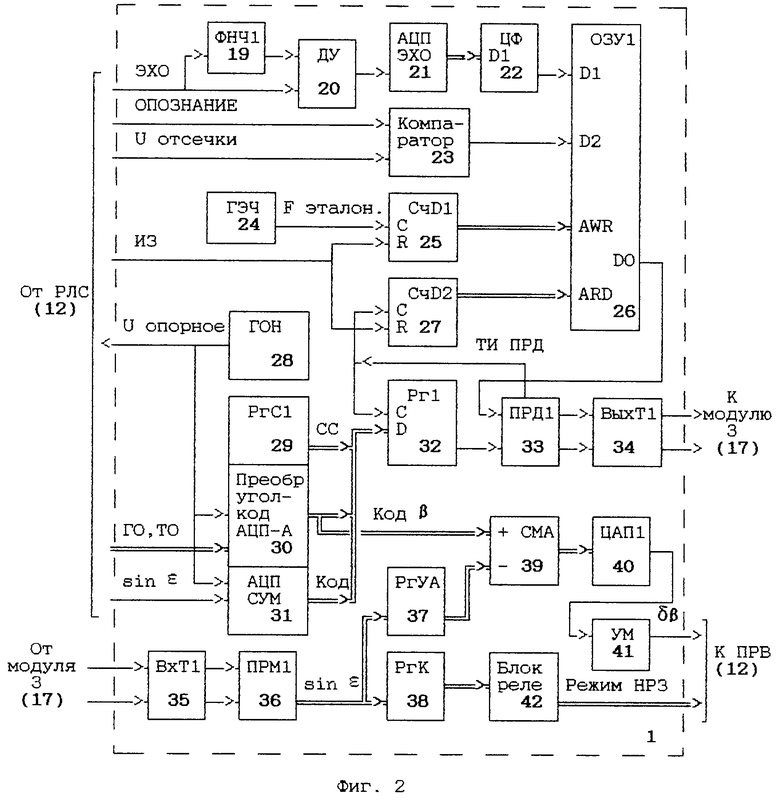
На фиг. 2 приведена структурная схема выносного блока сопряжения с радиолокационной станцией и передвижным радиовысотомером.
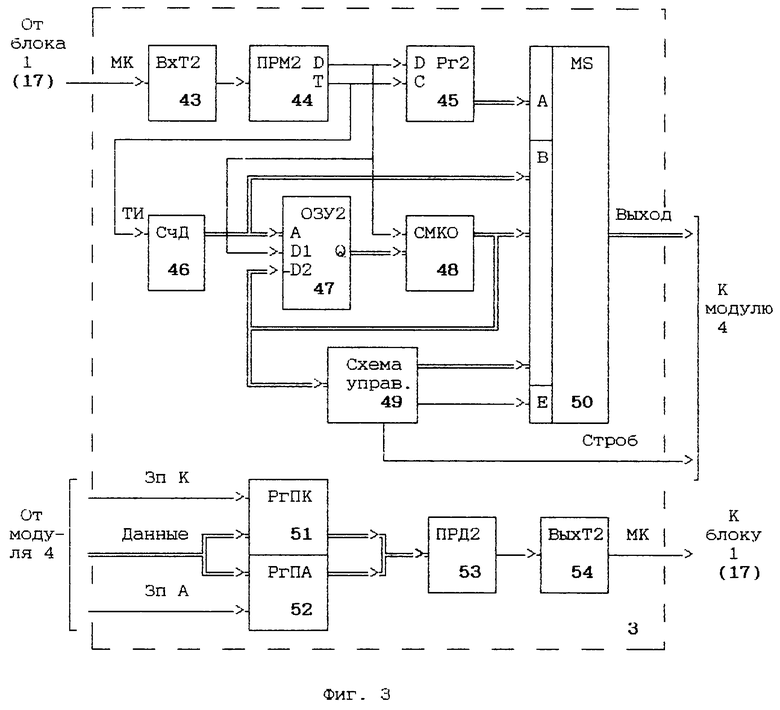
На фиг. 3 приведена структурная схема одного канала модуля сопряжения с выносными блоками.
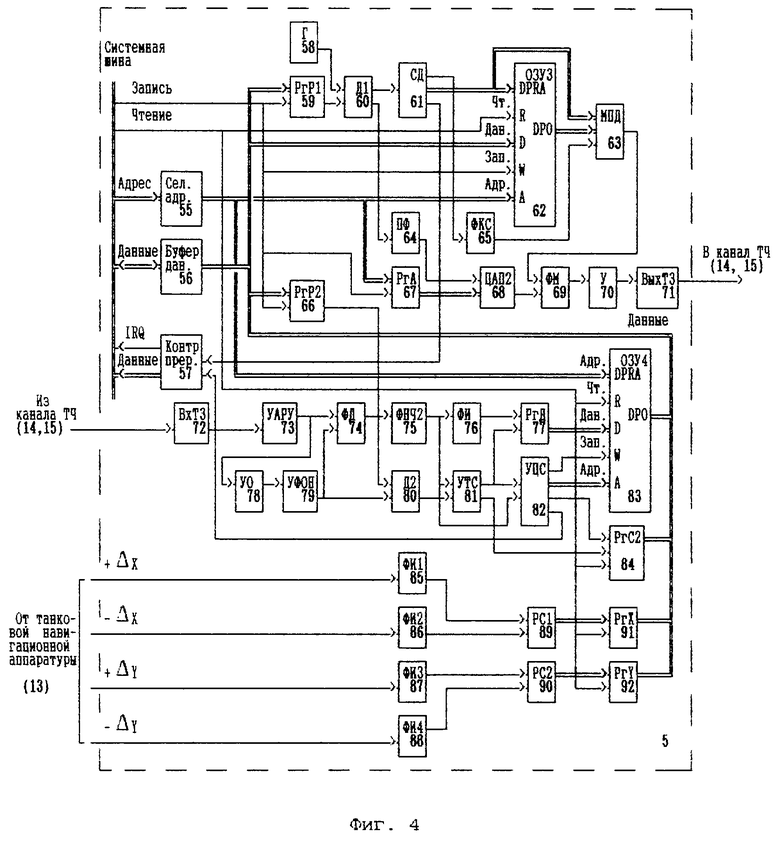
На фиг. 4 приведена структурная схема модуля сопряжения с танковой навигационной аппаратурой (ТНА) и каналом связи автоматизированной системы передачи данных (АСПД-У).
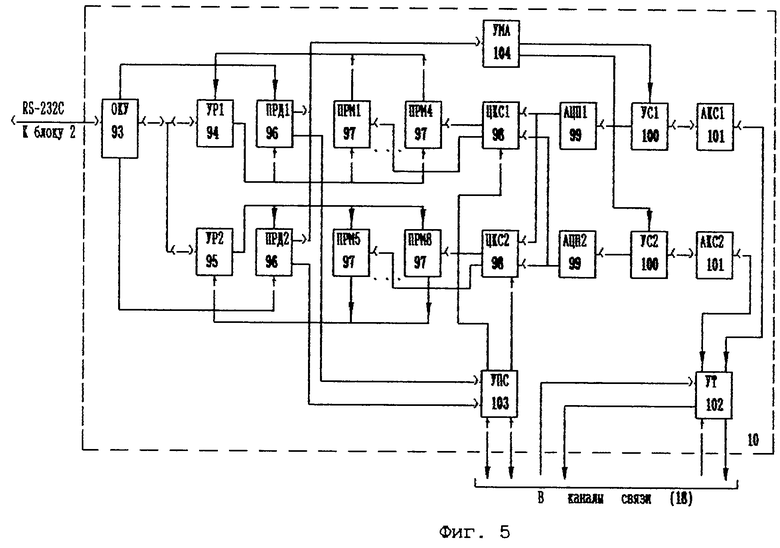
На фиг.5 приведена структурная схема многоканальной аппаратуры передачи данных.
Пример варианта выполнения устройства
Автоматизированное рабочее место оператора управления воздушным движением (фиг. 1) содержит два выносных блока 1 сопряжения с радиолокационной станцией (РЛС) и передвижным радиовысотомером (ПРВ), специализированную электронную вычислительную машину 2, модуль сопряжения с выносными блоками 3, модуль математического акселератора 4, модуль сопряжения с танковой навигационной аппаратурой (ТНА) и каналом связи автоматизированной системы передачи данных (АСПД-У) 5, модуль адаптера локальной вычислительной сети (ЛВС) 6, монитор 7, клавиатуру 8, шаровой манипулятор 9, многоканальную аппаратуру передачи данных (МАПД) 10, модуль адаптера телеграфного канала 11, цепи подключения к радиолокационной станции или передвижному радиовысотомеру 12, цепи подключения к танковой навигационной аппаратуре 13, канал связи автоматизированной системы передачи данных АСПД-У 14, канал связи аппаратуры типа "Иртыш" 15, цепи локальной вычислительной сети 16, мультиплексные каналы (МК) 17 подключения к выносным блокам, каналы связи для обмена телекодовой и телеграфной информацией 18.
Выносной блок 1 сопряжения с радиолокационной станцией и передвижным радиовысотомером (фиг.2) содержит первый фильтр низких частот (ФНЧ1) 19, дифференциальный усилитель (ДУ) 20, аналого-цифровой преобразователь (АЦП ЭХО) 21 сигнала ЭХО, цифровой фильтр (ЦФ) 22, компаратор 23, генератор эталонной частоты (ГЭЧ) 24, счетчик дистанции РЛС (СчD1) 25, первое двухпортовое оперативное запоминающее устройство (ОЗУ1) 26, счетчик дистанции передатчика (СчD2) 27, генератор опорного напряжения (ГОН) 28, первый регистр состояния (РгС1) 29, преобразователь угол-код (АЦП-А) напряжений ГО и ТО в код азимута 30, аналого-цифровой преобразователь (АДП СУМ) 31 синуса угла места, первый сдвиговый регистр (Рг1) 32, первый передатчик (ПРД1) 33, первый выходной линейный трансформатор (ВыхТ1) 34, первый входной линейный трансформатор (BxT1) 35, первый приемник (ПРМ1) 36, регистр установки азимута (РгУА) ПРВ 37, регистр команд (РгК) 38, сумматор (СМА) 39 выделения разности между текущим азимутом и азимутом установки ПРВ, первый цифроаналоговый преобразователь (ДАШ) 40 кода рассогласования азимута, усилитель мощности (УМ) 41 и блок реле 42.
Модуль сопряжения с выносными блоками 3 (фиг.3) содержит второй входной линейный трансформатор (ВхТ2) 43, второй приемник (ПРМ2) 44, второй сдвиговый регистр (Рг2) 45, счетчик дальности (СчД) 46, второе оперативное запоминающее устройство (ОЗУ2) 47, сумматор количества отметок (СМКО) 48, схему управления 49, выходной мультиплексор 50, регистр передачи команды (РгПК) 51, регистр передачи азимута (РгПА) 52, второй передатчик (ПРД2) 53 и второй выходной линейный трансформатор (ВыхТ2) 54.
Модуль сопряжения с танковой навигационной аппаратурой и каналом связи автоматизированной системы передачи данных 5 (фиг.4) содержит селектор адреса 55, буферные формирователи данных 56, контроллер прерывания 57, кварцевый генератор (Г) 58, первый регистр режима работы (РгР1) 59, первый делитель частоты (Д1) 60, счетчик с дешифратором (СД) 61, третье двухпортовое оперативное запоминающее устройство (ОЗУ3) 62, мультиплексор данных (МПД) 63, полосовой фильтр (ПФ) 64, формирователь коррекционного сигнала (ФКС) 65, второй регистр режима работы (РгР2) 66, регистр амплитуды выходного сигнала (РгА) 67, второй цифроаналоговый преобразователь (ЦАП2) 68, фазовый модулятор (ФМ) 69, усилитель (У) 70, третий выходной трансформатор (ВыхТ3) 71, третий входной трансформатор (ВхТ3) 72, узел автоматической регулировки усиления (УАРУ) 73, фазовый детектор (ФД) 74, второй фильтр низких частот (ФНЧ2) 75, формирователь импульсов (ФИ) 76, регистр данных (РгД) 77, усилитель-ограничитель (УО) 78, узел формирования опорного напряжения (УФОН) 79, второй делитель частоты (Д2) 80, узел тактовой синхронизации (УТС) 81, узел цикловой синхронизации (УДС) 82, четвертое двухпортовое оперативное запоминающее устройство (ОЗУ4) 83, второй регистр состояния (РгС2) 84, первый, второй, третий, четвертый (ФИ1-ФИ4) ограничители-формирователи импульсов 85, 86, 87, 88, первый и второй (РС1 и РС2) реверсивные счетчики импульсов 89, 90, первый и второй (РгХ и PrY) регистры приращения координат 91, 92.
Многоканальная аппаратура передачи данных 10 (фиг.5) содержит оконечный узел 93, первый и второй узлы регистрации 94, 95, первый (m-ный) узел передатчиков 96, первый (n-ный) узел приемников 97, первый (n-ный) узел коммутаторов цифровых сигналов 98, узлы аналого-цифровых преобразователей 99, узды усилителей-фильтров 100, узлы коммутаторов аналоговых сигналов 101, узел трансформаторов 102, узел преобразования сигналов 103, узел модуляторов и аттенюатора 104.
Автоматизированное рабочее место оператора управления воздушным движением (АРМ УВД) предназначено для автоматизированного решения задач обработки радиолокационной информации (РЛИ), поступающей от аналоговых радиолокационных станций (РЛС) и пунктов автоматизированной системы управления воздушным движением (АСУ ВД).
АРМ УВД обеспечивает решение следующих задач:
преобразование аналоговой информации о воздушной обстановке от двух РЛС или от РЛС и передвижного радиовысотомера (ПРВ) в цифровую форму, передачу ее по мультиплексному каналу (кабелю РК-75 или КВСФ-75) в ЭВМ АРМ для обработки;
выделение из РЛИ координат воздушных объектов (ВО), отображение ВО на экране монитора и постановку их на сопровождение при сопряжении АРМ с двумя аналоговыми РЛС или ПРВ. Количество сопровождаемых ВО не менее 100. Удаление АРМ от РЛС - до 200 м. Радиус обработки РЛИ - от 75 до 300 км (75, 100, 150, 200, 300 км) с дискретностью 1/750 радиуса;
управление режимами работы наземных радиозапросчиков (НРЗ);
прием и обработку данных общего опознавания;
управление радиовысотомером (выдачу указаний по азимуту);
отождествление РЛИ от РЛС и пунктов АСУ ВД (до 8 пунктов);
решение задач укрупнения (группирования) ВО;
прием и выдачу данных о воздушной обстановке на пункты АСУ ВД по каналам связи в реальном масштабе времени;
регистрацию входной и выходной информации с возможностью последующего ее просмотра на средствах отображения или распечатки;
автономный и комплексный тренаж операторов АРМ УВД;
диагностирование работоспособности АРМ с дискретностью до модуля.
АРМ УВД обеспечивает решение функциональных задач в жестких условиях эксплуатации в широком диапазоне климатических и механических воздействий, в том числе и при размещении на колесных и гусеничных шасси.
В базовый комплект АРМ входит следующая аппаратура:
два выносных блока сопряжения 1 с РЛС (ПРВ) - с комплектами кабеля 12 для сопряжения с РЛС различных типов (П18, 1Л13, П15, П19, П40, 35Н6, ПРВ-16);
два высокочастотных кабеля (РК-75) 17 мультиплексных каналов связи с ЭВМ длиной по 200 м;
системный блок 2 специализированной ЭВМ, совместимой с IBM PC, со встроенными дополнительными модулями;
жидкокристаллический монитор 7;
клавиатура (пульт) 8;
шаровой манипулятор 9.
В состав встроенных в ЭВМ модулей входят:
модуль сопряжения с выносными блоками 3;
спецпроцессор обработки РЛИ (математический акселератор) 4 из состава дополнительных модулей специализированной ЭВМ;
модуль сопряжения с танковой навигационной аппаратурой (ТНА) 5, обеспечивающий сопряжение ТНА с ЭВМ при встраивании АРМ в подвижный объект, а также сопряжение с каналом связи автоматизированной системы передачи данных АСПД-У и одним каналом связи аппаратуры "Иртыш".
Для расширения функциональных возможностей в состав АРМ может дополнительно входить многоканальная аппаратура приема-передачи данных (МАПД) 10 или модуль адаптера телеграфного канала 11 для обмена РЛИ и телеграфной информацией с пунктами АСУ УВД и устанавливаемый в ЭВМ модуль адаптера локальной вычислительной сети (ЛВС) 6, обеспечивающий обмен информацией с другими ЭВМ.
МАПД 10 имеет 2 передатчика и 8 приемников, работающих в алгоритмах аппаратуры "Иртыш", и подключается к ЭВМ по интерфейсу RS-232C.
Для обеспечения связи с другими АСУ УВД по телеграфному каналу связи вместо МАПД к системному блоку специализированной ЭВМ по интерфейсу RS-232C может быть подключен модуль адаптера телеграфного канала 11, обеспечивающий преобразование токовых телеграфных посылок в напряжения импульсов интерфейса RS-232C при приеме и обратного преобразования при передаче.
Выносные блоки 1 устанавливаются в непосредственной близости от сопрягаемых РЛС (удаление до 1-2 м). От РЛС на выносные блоки 1 поступают импульсы запуска (ИЗ), эхо-сигнал, сигнал общего опознавания от запросчика и сигналы от сельсин-датчиков грубого и точного отсчета (ГО, ТО) азимутального положения антенны РЛС. От ПРВ поступает также сигнал с датчика синуса угла места антенны.
Выносной блок 1 обеспечивает:
выделение эхо-сигналов от вероятных ВО и определение дистанции до них;
преобразование сигналов грубого (ГО) и точного (ТО) отсчетов азимута антенны РЛС или ПРВ в код азимута;
преобразование сигнала синуса угла места антенны ПРВ в код синуса угла места;
выдачу в мультиплексный канал связи 17 (на ЭВМ) кода текущего азимута, синуса угла места (для ПРВ) антенны и дальности отметок целей и отметок опознавания;
прием от ЭВМ и выдачу на НРЗ команд управления режимами НРЗ, прием команд управления разворотом антенны ПРВ и команд установки масштаба (радиуса) работы блока.
При обработке эхо-сигнала выносным блоком аппаратно обеспечивается подавление постоянной составляющей входного сигнала (шумов), автоматическое определение уровня помех, вычисление кода амплитуды уровня отсечки эхо-сигнала, выделение сигналов, превышающих текущий уровень отсечки (вероятных отметок ВО) и определение их дальности.
Протяженные помехи, создающие постоянную составляющую ("местники", шумы), подавляются в выносном блоке с помощью аналогового, а затем цифрового фильтра.
Выделенные признаки наличия отметок ВО записываются в ячейку двухпортового ОЗУ блока, адрес которой соответствует коду дальности отметки. Передатчик блока последовательно читает все ячейки ОЗУ текущего луча развертки от нуля до конца дистанции и передает по мультиплексному каналу значения признаков наличия отметки ЭХО или опознавания.
Модуль сопряжения с выносными блоками 3 обеспечивает прием по МК 17 информации от двух выносных блоков 1, ее обработку и выдачу на модуль математического акселератора 4 ЭВМ, а также передачу по МК 17 на выносные блоки 1 команд управления ПРВ и НРЗ, поступающих с ЭВМ через модуль математического акселератора.
Принимаемые от выносного блока 1 значения азимута и синуса угла места антенны РЛС выдаются на модуль математического акселератора 4 сразу, а признаки отметок записываются в ОЗУ модуля, где хранятся данные пяти последних лучей развертки.
При наличии в пяти смежных лучах развертки более трех отметок на одной дальности формируется признак наличия пачки отметок. По этому признаку на модуль математического акселератора 4 ЭВМ выдается код дальности этой пачки.
При уменьшении количества отметок в пачке до нуля на модуль математического акселератора 4 выдается признак конца пачки, при получении которого модуль математического акселератора 4 вычисляет азимут центра пачки (дужки).
Выделение пачек резко повышает помехоустойчивость и сокращает объем поступающей на вход модуля математического акселератора 4 информации, т.к. вероятность образования пачек за счет шумов и помех чрезвычайно мала. В том случае, если ложные пачки все-таки формируются, они выявляются ЭВМ при работе программы автозахвата.
Координаты центров пачек (дальность и азимут) выдаются с модуля математического акселератора 4 на процессор ЭВМ, который и производит автозахват трасс.
Использование при обработке сигнала схемы автоматического регулирования уровня отсечки (цифрового фильтра) существенно снижает вероятность захвата ложных целей.
Автоматический захват трасс производится только для ВО, имеющих скорость более 30 м/с. По ВО, имеющим более низкую скорость, решение о постановке на сопровождение принимает оператор, что также снижает вероятность постановки на сопровождение ложных трасс.
По неподвижным отметкам, повторяющимся в нескольких обзорах РЛС, в ЭВМ автоматически формируется карта "местников" и такие отметки на дальнейшую обработку не поступают.
Координаты отметок и трасс выдаются на видеомонитор 7, что позволяет оператору АРМ контролировать процесс обнаружения ВО, при необходимости корректировать его и выдавать команды на НРЗ и ПРВ.
Первичная информация от ПРВ проходит такую же обработку и высвечивается также на мониторе 7 для контроля работы ПРВ. Таким образом, на экране монитора 7 оператор видит пронумерованные трассы с векторами скорости и другими характеристиками, отметки предполагаемых ВО, отметки опознавания (в другом цвете). Высвечивается также вектор, указывающий азимут антенны ПРВ.
АРМ УВД позволяет оператору ПУ управлять азимутальным положением антенны ПРВ и режимами работы наземного радиозапросчика (НРЗ).
Команды управления НРЗ (задание режимов, включение опознавания), команды управления работой блока (установка радиуса, включение имитации) передаются с ЭВМ 2 на выносной блок 1 по мультиплексному каналу 17.
Азимут антенны ПРВ задается оператором либо вручную с помощью шарового манипулятора 9, либо оператор задает номер трассы, которую ПРВ должен сопровождать, а ЭВМ выдает на ПРВ через выносной блок 1 азимуты точек этой трассы по мере его изменения.
В выносном блоке 1 заданное значение азимута сравнивается с текущим азимутом антенны. Разность значений преобразуется в управляющие напряжения грубого и точного отсчета (ГО, ТО), которые и подаются на входы усилителей привода вращения антенны ПРВ.
При работе с НРЗ оператор АРМ имеет возможность переключать диапазон работы НРЗ (третий, седьмой), включать режимы 1, 2, КЗ (контрольный запрос), управлять включением запросчика (сигнал "Манипуляция"). С выносного блока 1 до ЭВМ 2 доводятся признак работы НРЗ в соответствующем диапазоне и признак включения мощности НРЗ.
Сигналы опознавания от НРЗ поступают на отдельный вход выносного блока 1 (на вход компаратора с постоянным уровнем отсечки), преобразуются в цифровой сигнал (кодирование бинарное - ноль или единица) и также выдаются в мультиплексный канал 17. В модуле сопряжения 3 сигналы опознавания обрабатываются так же, как и первичные отметки РЛС.
Устройство и работа составных частей
Выносной блок сопряжения с РЛС 1 работает следующим образом.
С РЛС или ПРВ на входы блока поступают импульсы запуска (ИЗ), эхо-сигнал (ЭХО), сигнал общего опознавания и трехфазные напряжения с сельсин-датчиков грубого и точного отсчета.
Эхо-сигнал поступает на вход первого фильтра низких частот (ФНЧ1) 19 и на первый вход дифференциального усилителя (ДУ) 20, к второму (инверсному) входу которого подключен выход ФНЧ1 19. С выхода ДУ 20 разность сигналов поступает на АДП ЭХО 21, который преобразует эхо-сигнал в 5-разрядный код, пропорциональный мощности входного сигнала на дискретном отрезке дистанции δD. Код ЭХО поступает на цифровой фильтр 22, который определяет средний уровень помех (уровень отсечки) на отрезке дистанции ±8 δD относительно эхо-сигнала и выделяет сигналы, превышающие этот уровень, как предполагаемые отметки ВО.
Выделенные признаки ВО записываются в двухпортовое ОЗУ1 26, позволяющее вести одновременно запись и чтение данных. Адрес ячейки ОЗУ1 при записи соответствует дистанции ВО и формируется с помощью двоичного счетчика дистанции СчD1 25, работа которого синхронизируется эталонной частотой (Fэталон) генератора ГЭЧ 24.
Сигналы общего опознавания поступают на компаратор 23, на второй вход которого подается напряжение отсечки. С выхода компаратора сигналы, превышающие уровень отсечки, поступают на второй вход записи данных ОЗУ1 26 и также записываются в ячейки ОЗУ1, адрес которых соответствует дистанции отметки.
К адресному входу чтения ОЗУ1 26 подключен счетчик бит передатчика CчD2 27. Генератор опорного напряжения 28 служит для генерации напряжения питания сельсин-датчиков синхронно-следящего привода (ССП) РЛС и датчика синуса угла места ПРВ.
Преобразователь угол-код (АЦП-А) 30 блока преобразует трехфазное переменное напряжение сельсин-датчиков грубого и точного отсчета (ГО, ТО) ССП антенны РЛС (ПРВ) в код азимута.
При работе с ПРВ переменное напряжение, пропорциональное синусу угла места оси антенны ПРВ, поступает на вход ДЦП синуса угла места (АЦП СУМ) 31, который преобразует это напряжение в двоичный код.
Регистр состояния РгС1 29 блока служит для хранения признаков режима и состояния блока и доведения их до ЭВМ АРМ.
По каждому импульсу запуска (ИЗ) РЛС данные с выходов РгС1 29, АЦП-А 30 и АЦП СУМ 31 последовательно выдаются на первый сдвиговый регистр Рг1 32, на синхровход которого поступают тактовые импульсы передатчика.
С выхода регистра 32 данные последовательным кодом через передатчик мультиплексного канала 33 и первый выходной линейный трансформатор ВыхТ1 34 выдаются в мультиплексный канал связи 17.
После передачи слова состояния, азимута и угла места к входу первого передатчика ПРД1 33 подключается выход ОЗУ1 26 и начинает работать счетчик СчD2 27, который отсчитывает передаваемые из ОЗУ1 биты данных.
Признаки отметок ВО и опознавания выдаются на передатчик 33 непосредственно из ОЗУ1 26 по мере чтения ячеек с адресами от нуля до конца дистанции.
После передачи последнего слова данных по сигналу со счетчика 27 первый передатчик 33 выдает в канал связи команду К, которая служит признаком окончания цикла передачи выносного блока 1 и разрешает выдачу ответного слова с модуля сопряжения с выносными блоками 3, установленного в ЭВМ 2 АРМ УВД.
Передача данных в канале 17 ведется со скоростью 1 Мбит/с в коде "Манчестер II" словами длиной в 16 бит, следующими одно за другим. Каждое слово начинается синхросигналом длительностью в три такта и заканчивается битом контроля по нечетности (17-й бит).
При приеме данных от ЭВМ сигнал из канала связи через первый входной линейный трансформатор ВхТ1 35 поступает на первый приемник 36 выносного блока 1. В каждом цикле приемник получает два слова - команду и данные. Полученная от ЭВМ команда управления режимами блока и НРЗ записывается и хранится на регистре команд РгК 38. Сигналы управления режимами НРЗ выдаются на НРЗ через блок реле 42 в виде сигналов напряжением 27 В.
Принятый код азимута записывается на регистр РгУА 37, откуда выдается на сумматор СМА 39 для сравнения с текущим азимутом ПРВ. Разность кодов с выхода СМА 39 преобразуется на ЦАП1 40 в аналоговые сигналы рассогласования, которые через усилитель мощности УМ 41 с трансформаторным выходом выдаются на входы следящего привода антенны ПРВ.
Модуль сопряжения с выносными блоками 3 работает следующим образом.
Сигнал со входа мультиплексного канала связи 17 через согласующий второй входной линейный трансформатор 43 поступает на вход второго приемника 44.
Принятые от выносного блока слово состояния, азимут и синус угла места с выхода приемника последовательным кодом записываются на второй сдвиговый регистр 45, откуда параллельным кодом через первый вход выходного мультиплексора 50 выдаются на вход модуля математического акселератора 4.
При приеме слов D1-D94 признаки отметок ВО и опознавания поступают на входы записи данных ОЗУ2 47. К адресным входам ОЗУ2 подключен счетчик принимаемых бит, он же счетчик дальности СчД 46, работающий от тактовых импульсов второго приемника 44.
При приеме каждого бита производится чтение ячейки ОЗУ2, в которой хранятся данные о наличии отметок на текущей дальности в предыдущих четырех лучах развертки РЛС. Данные с выхода ОЗУ2 и принимаемый бит поступают на входы сумматора количества отметок СМКО 48 и на входы D2 ОЗУ2 47, куда записываются в конце такта чтения со сдвигом на один разряд таким образом, что в ОЗУ2 всегда сохраняются данные за последние четыре цикла приема данных.
При наличии в пяти смежных лучах развертки более трех ВО на одной дальности на выходе сумматора 48 формируется признак наличия пачки отметок. По этому признаку схема управления 49 выдает на модуль математического акселератора 4 ЭВМ строб записи данных. Одновременно открывается второй вход (вход В) выходного мультиплексора 50, через который на вход данных модуля математического акселератора (МА) выдается код дальности и два разряда кода количества ВО в пачке.
Если в предыдущем луче признака пачки не было, то схема управления 49 дополнительно формирует признак начала пачки. При уменьшении количества отметок в пачке до нуля на МА выдается признак конца пачки (КП).
По поступающим на него значениям текущего азимута антенны РЛС и дальности отметок МА 4 определяет координаты центров пачек - ВО.
Выдаваемые с МА 4 на модуль сопряжения с выносными блоками 3 данные (команда и азимут ПРВ) записываются на регистры РгПК 51 и РгПА 52 соответственно. По окончании приема данных (прием команды К1) с приемника 44 на передатчик 53 модуля выдается стартовый сигнал, по которому команда с РгПК 51 переписывается на второй передатчик 53, который преобразует полученные данные в биполярный код "Манчестер-II" и формирует синхросигнал и контрольный (17-й) бит данных.
По окончании выдачи команды таким же образом выдается в линию связи слово данных с регистра РгПА 52.
С выхода второго передатчика 53 сигнал через согласующие микросхемы поступает на второй выходной линейный трансформатор ВыхТ2 54 модуля, со вторичной обмотки которого и выдается в канал связи.
Для контроля работоспособности трактов передачи, приема и обработки принимаемых данных в модуле предусмотрен имитатор данных РЛС, имитирующий работу выносного блока.
При включении режима контроля (шлейфа) данные с имитатора автоматически поступают на вход одного из передатчиков модуля, откуда выдаются в линию связи. Блокировка приема данных на время передачи контрольной информации снимается, поэтому сигнал со вторичной обмотки согласующего трансформатора поступает на вход приемника того же канала модуля и обрабатывается точно так же, как и при приеме от выносного блока.
Модуль сопряжения с танковой навигационной аппаратурой (ТНА) и каналом связи автоматизированной системы передачи данных (АСПД-У) 5 (фиг.4) обеспечивает прием приращений координат для последующей обработки, а также автоматизированный прием радиолокационной информации и данных о текущем местоположении и боеготовности от подчиненных объектов.
Условно модуль можно разделить на следующие функциональные узлы:
узел сопряжения с танковой навигационной аппаратурой;
узел телекодового передатчика;
узел телекодового приемника.
Работа узла сопряжения с танковой навигационной аппаратурой
Во время движения объекта с танковой навигационной аппаратуры ТНА-4-6 поступают импульсы приращения координат +ΔX,-ΔX,+ΔY,-ΔY. Количество и последовательность поступления импульсов зависит от курса движения объекта. Импульсы приращения координат поступают на ограничители-формирователи импульсов 85, 86, 87, 88 для нормирования по амплитуде в соответствии с уровнями сигналов ТТЛ- логики.
Сформированные импульсы приращения координат ΔX,-ΔX,+ΔY,-ΔY подсчитываются реверсивными счетчиками 89, 90. Значение приращения счетчиков хранится в буферных регистрах координат 91, 92 и периодически считывается через шину данных в процессор ЭВМ.
Работа узла телекодового передатчика
Стабилизированные по частоте импульсы с кварцевого генератора 58 поступают на первый делитель частоты 60, который в зависимости от значения кода, поступающего с первого регистра управления режимом работы 59, формирует частоты опорного несущего колебания и тактовых импульсов.
Прямоугольные импульсы опорного несущего колебания поступают на полосовой фильтр 64, которым выделяется первая гармоника опорной несущей частоты.
В зависимости от характеристик и типа каналообразующей аппаратуры связи амплитуда опорного несущего колебания изменяется с помощью второго цифроаналогового преобразователя 68, в котором происходит умножение аналогового опорного несущего колебания на двоичный коэффициент амплитуды, поступающий с регистра амплитуды выходного сигнала 67.
Тактовые импульсы с частотой, соответствующей скорости передачи данных в телекодовом канале, с первого делителя частоты 60 поступают на счетчик с дешифратором 61.
В процессе подсчета тактовых импульсов в момент готовности передатчика получать очередной блок данных для передачи на выходе дешифратора 61 формируется сигнал прерывания IR1, который поступает на контроллер прерываний 57.
Контроллер прерываний 57 анализирует наличие и уровни прерываний, поступивших в данный момент времени, и выставляет на системную шину сигнал прерывания процессора.
Процессор, получив прерывание, под управлением программы обработки прерывания считывает из контроллера прерываний 57 код прерывания, по которому определяет тип узла, которое выставило прерывание.
Определив тип узла, процессор формирует блок данных для выдачи в канал связи. После этого процессор выставляет на шину адреса код адреса третьего двухпортового ОЗУ 62 и очередное слово из состава блока данных. Старшие разряды адреса поступают на селектор адреса 55, а младшие четыре разряда определяют адрес ячейки третьего двухпортового ОЗУ 62. В селекторе адреса 55 происходит сравнение поступившего адреса с кодом узла и в случае совпадения выдается сигнал, разрешающий запись очередного слова блока данных в третье двухпортовое ОЗУ 62.
К моменту начала передачи в канал связи очередного блока данных они находятся в третьем двухпортовом ОЗУ 62. При этом счетчик с дешифратором 61 выставляет на третье двухпортовое ОЗУ 62 и мультиплексор данных 63 адрес соответственно слова и разряда блока данных. При этом очередное слова считывается из третьего двухпортового ОЗУ 62 и с помощью мультиплексора данных 63 преобразуется в последовательный код. Также под управлением счетчика с дешифратором 61 после передачи последнего бита блока данных в поток информации добавляется кодовая комбинация коррекционного сигнала, поступающего из формирователя коррекционного сигнала 65, для отметки конца блока данных. При этом на выходе мультиплексора данных 63 формируется кодограмма одного блока данных.
Для передачи в канал тональной частоты последовательность двоичных бит данных преобразуется в синусоидальный сигнал с относительной фазовой модуляцией. Модулирование происходит в фазовом модуляторе 69, на один вход которого поступает опорное гармоническое колебание с выхода второго цифроаналогового преобразователя 68, а на другой вход поступает последовательность двоичных бит данных с мультиплексора данных 63. Под воздействием двоичных бит данных на выходе фазового модулятора 69 происходит изменение фазы опорного гармонического колебания и тем самым формируется выходной фазомодулированный сигнал.
С выхода фазового модулятора 69 сигнал поступает на усилитель 70 и затем через третий выходной трансформатор 71 на каналообразующую аппаратуру, в качестве которой могут быть радиостанция или проводной канал связи.
Работа узла телекодового приемника
Фазомодулированный сигнал из канала связи через третий входной трансформатор 72 поступает на узел автоматической регулировки усиления 73, в котором происходит стабилизация входного сигнала по амплитуде. Стабилизированный входной сигнал поступает на усилитель-ограничитель 78, на выходе которого формируется цифровой сигнал с уровнями ТТЛ-логики. Из цифрового входного сигнала с помощью узла формирования опорного напряжения 79 выделяется несущая частота, по фазе совпадающая с фазой несущей частоты входной информации.
Опорная частота поступает на фазовый детектор 74, на второй вход которого поступает стабилизированный по амплитуде входной сигнал. Так как фаза входного сигнала изменяется синхронно с передаваемой информацией, а фаза опорного напряжения синхронна и синфазна с несущей частотой, то на выходе фазового детектора 74 выделяется огибающая входного сигнала, соответствующая принятой информации.
Опорная частота поступает также на второй делитель частоты 80, который в зависимости от режима работы под управлением второго регистра режима работы 66 формирует частоту тактовых сигналов, равную скорости передачи информации.
Огибающая входного сигнала фильтруется вторым фильтром низких частот 75 от несущей частоты и помех и с помощью формирователя импульсов 76 преобразуется в информационный цифровой сигнал с уровнями ТТЛ-логики.
У полученного таким образом информационного цифрового сигнала характеристические моменты восстановления постоянно флуктуируют. Это происходит в результате амплитудно-частотных, фазочастотных искажений в канале связи, а также под влиянием помех, присутствующих в канале связи.
Для устранения флуктуации регистрация информации осуществляется методом стробирования. При этом узел тактовой синхронизации 81 формирует стробирующий сигнал, который совпадает с серединой единичной посылки информационного сигнала. Этим сигналом происходит запись информации в регистр данных 77.
Для определения момента начала блока информации информационный цифровой сигнал поступает на узел цикловой синхронизации 82, который из общего потока информации выделяет информацию коррекционного сигнала и фиксирует время его прихода. Таким образом, счетчик адреса слов и бит входной информации в узле цикловой синхронизации 82 работает синфазно с соответствующим счетчиком на передающей стороне.
Узел цикловой синхронизации 82 формирует адрес слов информационного блока и импульс записи информации в четвертое двухпортовое ОЗУ 83. После записи всего блока данных узел цикловой синхронизации 82 формирует сигнал прерывания IR2, который поступает на контроллер прерываний 57.
Процессор ЭВМ под управлением программы обработки прерывания телеприемника считывает информацию блока данных из четвертого двухпортового оперативного запоминающего устройства 83 и из второго регистра состояния 84 телеприемника, в котором хранится текущее состояние узла цикловой синхронизации и информация о режиме работы телеприемника.
Многоканальная аппаратура передачи данных (МАПД) 10 (фиг.5) представляет собой групповую АПД, обслуживающую по приему не менее восьми абонентских комплексов и обеспечивающую передачу информации по двум независимым направлениям.
МАПД 10 предназначена для одновременного приема открытой телекодовой информации (ТКИ) по восьми каналам.
Каждый из каналов может быть образован:
радиосредствами по каналу тональной частоты (ТЧ);
радиосредствами по импульсному каналу (ИК);
полевым телефонным кабелем (проводной канал).
Любой из приемников модуля должен работать по цифровому каналу (ЦК), образованному радиостанцией.
МАПД 10 предназначена для одновременной передачи открытой ТКИ по двум независимым каналам тональной частоты, образованным радиосредствами, или передачи ТКИ по двум независимым импульсным каналам, образованным радиосредствами, или передачи ТКИ от любого из двух передатчиков по цифровому каналу, образованному радиостанциями, или передачи по двум независимым проводным каналам (ПК) связи.
МАПД 10 предназначена для передачи и приема дискретной информации реального масштаба времени и выполняет функции защиты информации от ошибок и преобразования ее в вид, пригодный для передачи методами частотной модуляции (ЧМ), биимпульсами (БИ) и цифровыми сигналами (ЦС) по стыку С1 (ГОСТ 25.007-81 стык С1-ТЧ, ГОСТ 27.232-87 стык С1-ФЛ).
МАПД 10 обеспечивает обмен с ЭВМ по двунаправленному последовательному интерфейсу RS-232C.
МАПД 10 обеспечивает обмен ТКИ по проводным каналам с коэффициентом доведения не менее 0,9 на максимальной дальности не менее 10 км на скорости 1200 бит/с, 2400 бит/с и не менее 5 км на скорости 4800 бит/с.
МАПД 10 обеспечивает любое сочетание различных методов приема-передачи данных по каналам связи.
МАПД 10 обеспечивает прием-передачу по всем каналам в любом из трех возможных режимов (режим 1, режим 2 или режим 3) при работе с аппаратурой Т-235-1Л-1 для режимов обмена "ОКОДК1" адресного и циркулярного (режим 1) или "ОКОДК2" циркулярного без формирования кодограммы УСД (в режимах 2 и 3).
МАПД 10 обеспечивает прием-передачу кодовых комбинаций длиной 69 элементов со структурой, принятой в аппаратуре Т-235-1Л-1 для видов обмена "ОКОДК1", "ОКОДК2".
В режиме 1 МАПД 10 обеспечивает режим передачи с выдачей двух кодовых комбинаций "точек" (последовательность чередующихся единиц и нулей) и одной комбинации фазового пуска (КФП) при начальной синхронизации, а также одной КФП на месте каждой 96-кодовой комбинации в блоке передаваемых данных для работы с аппаратурой Т-235-1Л-1, работающей в режиме обмена "ОКОДК1".
В режиме 2 МАПД 10 обеспечивает режим передачи с выдачей двух кодовых комбинаций "точек" и двух КФП (инверсной и прямой) при начальной синхронизации, а также двух КФП (инверсной и прямой) на месте каждой 96- и 97-кодовых комбинаций в блоке передаваемых данных для работы с аппаратурой Т-235-1Л-1, работающей в режиме обмена "ОКОДК2".
МАПД 10 обеспечивает выдачу в канал связи кодовых комбинаций "Молчание" при отсутствии ТКИ от ЭВМ как в режиме 1, так и в режиме 2.
МАПД 10 обеспечивает работу в режиме 3. Режим 3 аналогичен режиму 2 и отличается от режима 2 тем, что включение/выключение канала происходит при наличии/отсутствии информации в буфере передатчика.
Под включением канала понимается:
включение радиостанции на передачу;
выдача сигналов в проводной канал.
Под выключением канала понимается:
выключение радиостанции на передачу;
отсутствие сигналов в проводном канале.
В режиме "ЧМ" в МАПД 10 используются характеристические частоты: для символа "0" - 2100 Гц, для символа "1" - 1300 Гц.
В режиме "БИ" символ "1" кодируется повтором предыдущего дибита 10 или 01, а при переходе к символу "0" - инверсией предыдущего дибита.
МАПД 10 обеспечивает пакетный обмен с ЭВМ по двунаправленному каналу последовательного интерфейса RS-232C.
Задание режимов работы МАПД 15 обеспечивается передачей в модуль признаков управления от ЭВМ (режим программного управления) или с лицевой панели (режим ручного управления).
В основе работы МАПД 10 лежат принципы формирования сигналов для передачи данных по двум передающим каналам и одновременного преобразования (демодуляции) принятых по приемным каналам сигналов с целью обеспечения обмена телекодовой информацией между абонентами подвижной системы связи как по радио (ТЧ или ИК), так и по проводным линиям связи, а также прием или передачу телекодовой информации по одному цифровому каналу.
Оконечный узел (ОКУ) 93 выполняет обмен пакетами данных в соответствии с процедурой обмена.
Каждый узел регистрации (УР) 94 обеспечивает хранение управляющей информации, поступающей через оконечный узел 93 по магистрали приема-передачи (МПП), и распределение данных в пакеты для четырех приемников 97 и одного передатчика 96 по общей шине (ОШ) при выполнении операций записи/чтения признаков управления, а также хранение информации, полученной из четырех приемников 97, приходящей по магистральной шине данных (МШД), при выполнении операции чтения данных приемников (ЧТПРМ).
Узел передатчиков 96 осуществляет хранение полученных из ОКУ 93 шестнадцатиразрядных информационных слов (количество слов от 4 до 16) и выдачу в канал связи в виде кодограмм телекодовой информации длительностью в 69 элементов.
Приемники 97 демодулируют ТКИ, полученную из канала связи, и передают данные через первый и второй узлы регистрации 94 и 95 и оконечный узел 93 в канал последовательного интерфейса при выполнении операции чтения данных из приемников.
Узел модуляторов и аттенюатора 104 формирует квазисинус с уровнями модулированного сигнала для канала ТЧ и выполняет формирование модулированного сигнала в режиме "БИ" с уровнями передачи проводного и радиоканалов.
Узел коммутаторов цифровых сигналов 98 осуществляет мультиплексирование принимаемых данных по каналам ТЧ, ПК, ИК и ДК на любой узел приемников 97.
Узлы аналого-цифровых преобразователей 99 выполняют усиление и нормирование по амплитуде сигналов, принятых по ТЧ или проводным каналам.
Узел преобразования сигналов 103 осуществляет развязку и преобразование входных и выходных сигналов, принимаемых и передаваемых по ИК и ЦК, а узлы усилителей-фильтров 100 - нормирование входных сигналов по частоте и усиления входных и выходных сигналов передаваемой и принимаемой ТКИ по каналам связи.
Узлы коммутаторов аналоговых сигналов 101 предназначены для организации режима шлейфа и режима работы, узел трансформаторов 102 - для согласования с линиями связи на прием и передачу для тонального и проводного каналов.
Модуль адаптера телеграфного канала 11 обеспечивает согласование линейных сигналов телеграфного канала и интерфейса RS-232C системного блока специализированной ЭВМ. В состав адаптера телеграфного канала входят преобразователи ток/напряжение и напряжение/ток.
Промышленная применимость
Предложенное автоматизированное рабочее место оператора управления воздушным движением промышленно реализуемо, обеспечивает автоматический ввод координат от удаленных аналоговых радиолокационных станций, меньшее количество (объем) кабелей сопряжения, полученных за счет выполнения предварительной обработки аналоговых сигналов в непосредственной близости к РЛС, малый объем аппаратуры передачи данных при увеличении количества используемых каналов связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| Комплекс технических средств автоматизации управления | 2016 |
|
RU2614927C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1988 |
|
SU1841101A1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО | 2022 |
|
RU2802596C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
Изобретение относится к вычислительной технике, а именно к цифровым вычислительным системам для обработки радиолокационной информации, и может быть использовано в пунктах управления воздушным движением. Техническим результатом является обеспечение автоматического ввода координат воздушных объектов от аналоговых радиолокационных станций или передвижных радиовысотомеров, сокращение количества кабелей сопряжения, сокращение объема аппаратуры передачи данных при увеличении количества каналов приема и передачи данных. Для этого автоматизированное рабочее место оператора управления содержит модуль адаптера локальной вычислительной сети, модуль математического акселератора, модуль сопряжения с танковой навигационной аппаратурой и каналом связи автоматизированной системы передачи данных, выносные блоки, монитор, клавиатуру, шаровой манипулятор, модуль адаптера телефонного канала, устройство многоканальной передачи данных. 2 з.п.ф-лы, 5 ил.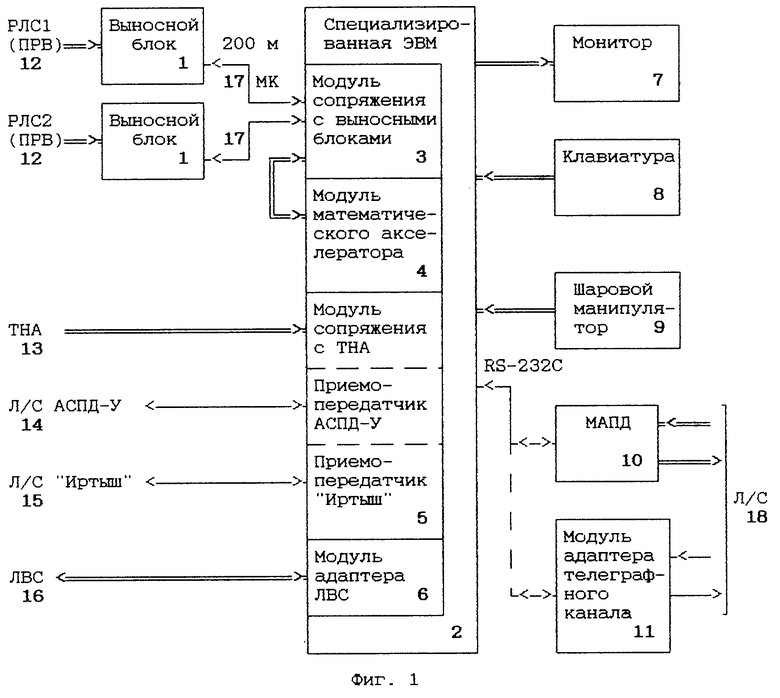
| RU 2158963 C1, 10.11.2000 | |||
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |
| ТРЕНАЖЕР ДЛЯ КОМАНДНОГО ПУНКТА С РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2000 |
|
RU2164040C1 |
| НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2121133C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ РТУТНЫЙ МАНОМЕТР | 1929 |
|
SU17812A1 |
| Дифференцирующее устройство | 1978 |
|
SU744630A1 |
| US 4516125 A, 07.05.1985. | |||

