Изобретение относится к области неразрушающего контроля, в частности к устройствам для внутритрубной диагностики состояния нефте-, газо-, продуктопроводов и может быть использовано при мониторинге действующих газопроводов.
Известно «Устройство для определения и регистрации геометрических параметров трубопроводов» (Патент РФ 2102704), состоящее из герметичного контейнера, эластичных манжет, датчика пути, блока вычислений и управления, регистратора, батареи электропитания, трехкомпонентного гироскопического измерителя угловой скорости, трехкомпонентного измерителя кажущихся ускорений, подключенных к информационным входам блока вычислений, ультразвуковых измерителей радиальных расстояний, подключенных к блоку вычислений, причем центр тяжести контейнера смещен относительно продольной оси к боковой поверхности.
Недостатком известного устройства является требование обеспечения маятниковости (смещение центра тяжести относительно геометрического центра гермоконтейнера) для устранения вращения дефектоскопа вокруг продольной оси. Смещение центра тяжести аппарата относительно продольной оси придает аппарату маятниковость, приводящую к неравномерному износу опорных манжет и увеличивает затраты на обслуживание аппарата.
Наиболее близким аналогом (прототипом) к предлагаемому является «Навигационно-топографический внутритрубный инспектирующий снаряд» (Патент РФ 2207512), содержащий герметичный контейнер, эластичные манжеты в передней и задней частях контейнера, датчики пути, приборные узлы, закрепленные внутри корпуса, блок электроники для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль, содержащий три ортогонально расположенных волоконно-оптических гироскопа и три ортогонально расположенных акселерометра, причем корпус измерительного модуля соединен с контейнером средствами крепления через упругодемпфирующие элементы для сокращения влияния угловых колебаний и вибраций аппарата во время движения на точность оценки углов ориентации.
Недостатком известного устройства является сложность реализации амортизаторов и недостаточная эффективность подавления влияния угловых вибраций на значения регистрируемых углов ориентации снаряда, движущегося в полости трубопровода, а также узость диапазона регистрируемых угловых скоростей, особенно при использовании дешевых волоконно-оптических гироскопов (ВОГ) малой чувствительности, имеющих большие верхние пределы регистрируемых угловых скоростей, а также высокочувствительных ВОГ, имеющих низкие значения верхних регистрируемых угловых скоростей. При использовании датчиков угловых скоростей с узким диапазоном регистрируемых угловых скоростей, но с высокой чувствительностью, ДУС не позволяет производить регистрацию углов поворота на высоких угловых скоростях. Например, волоконно-оптический гироскоп ВГ951 производства ООО «Физоптика» обладает высокой чувствительностью, но диапазон преобразуемых им угловых скоростей равен ±80 град/с. Волоконно-оптический гироскоп ВГ949 имеет диапазон преобразуемых угловых скоростей ±300 град/с, но более низкую чувствительность, по сравнению с ВГ951. При движении в полости газопровода дефектоскоп может проходить повороты трубы с угловой скоростью до 200 град/с, а плавные изменения курса или наклона местности могут преодолеваться с угловой скоростью около 0,01 и менее градусов в секунду. Обеспечить перекрытие такого диапазона использованием сигналов, непосредственно снимаемых с выходов названных датчиков угловых скоростей, невозможно. Это одна из технических проблем, требующих решения при наличии экономических ограничений.
Цель изобретения - расширение диапазона рабочих угловых скоростей и уменьшение влияния угловых вибраций на работу устройства.
Указанная цель достигается тем, что в устройстве, состоящем из герметичного контейнера, эластичных манжет в передней и задней частях контейнера, содержащем датчики пути, приборные узлы, закрепленные внутри корпуса, бортовой компьютер, накопитель для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль, содержащий три ортогонально расположенных волоконно-оптических гироскопа и три ортогонально расположенных акселерометра, в измерительный модуль введены первый, второй и третий интегрирующие узлы, многоканальный аналого-цифровой преобразователь и микроконтроллер, причем каждый интегрирующий узел состоит из операционного усилителя, конденсатора, первого и второго резисторов, быстродействующего электромагнитного реле, содержащего катушку и нормально разомкнутые контакты при этом сигнальный выход соответствующего волоконно-оптического гироскопа соединен с первым выводом первого резистора соответствующего интегрирующего узла, второй вывод первого резистора соединен с инвертирующим входом соответствующего операционного усилителя, к выходу которого подключен первый вывод соответствующего конденсатора, второй вывод которого подключен к инвертирующему входу этого же операционного усилителя и подключен к неподвижному контакту соответствующего электромагнитного реле, подвижный контакт которого соединен с выходом этого же операционного усилителя; первый вывод катушки электромагнитного реле соединен с положительным выводом источника электропитания, а второй вывод катушки электромагнитного реле соединен с соответствующим выходом микроконтроллера, интерфейсные входы ввода данных которого соединены с соответствующими выходами многоканального аналого-цифрового преобразователя, входы управления которого соединены с соответствующими выходами микроконтроллера, а соответствующие аналоговые входы многоканального аналого-цифрового преобразователя соединены с выходами соответствующих акселерометров и с выходами соответствующих операционных усилителей, соответствующих интегрирующих узлов, а неинвертирующие входы операционных усилителей интегрирующих узлов соединены с первыми выводами соответствующих вторых резисторов, вторые выводы которых соединены с общим выводом соответствующего волоконно-оптического гироскопа, причем шины управления и шина данных микроконтроллера соединены с соответствующими шинами бортового компьютера.
Рассматриваемый «Навигационно-топографический внутритрубный инспектирующий снаряд» вызван практической необходимостью обеспечения высокоточной привязки к топографическим координатам местности положения продольной оси трубопровода, что особенно важно для мониторинга за газо-, нефте-, продуктопроводами высокого давления, проложенными в болотистой местности, по дну водоемов и в оползневой зоне, где смещение оси трубопровода на некоторые критические расстояния могут привести к повреждению труб и явиться причиной экологической катастрофы и больших финансовых потерь из-за утечки транспортируемого продукта, а также из-за затрат на борьбу с последствиями загрязнения местности нефтепродуктами или с последствиями пожара от воспламенившегося газа.
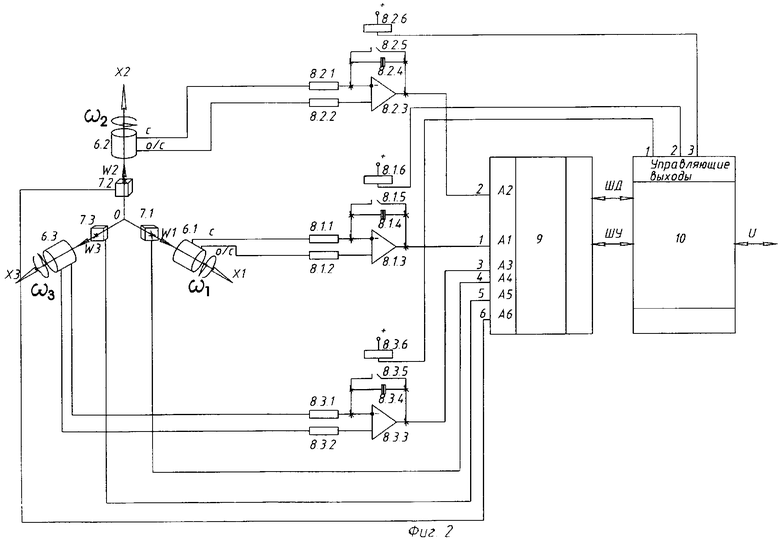
Изобретение поясняется чертежами: На Фиг.1 показан общий вид устройства. Функциональная схема измерительного модуля показана на Фиг.2. Координатные трехгранники, поясняющие ориентацию угловых скоростей и ускорений в системе, связанной с диагностическим аппаратом и в сопровождающей невращающейся горизонтальной системе показаны на Фиг.3.
Устройство состоит из герметичного корпуса 1, передней 2 и задней 3 эластичных манжет, колесного датчика пути 4, источника электропитания 5, первого 6.1, второго 6.2 и третьего 6.3 датчиков угловой скорости, первого 7.1, второго 7.2 и третьего 7.3 акселерометров, первого 8.1, второго 8.2 и третьего 8.3 интегрирующих узлов, многоканального аналого-цифрового преобразователя 9, микроконтроллера 10, бортового компьютера 11, накопителя данных 12. Трубопровод обозначен цифрой 13, газ показан стрелками 14.
Измерительный модуль (Фиг.2) включает в себя три волоконно-оптических датчика угловых скоростей 6.1, 6.2, 6.3, три акселерометра 7.1, 7.2, 7.3, три одинаковых интегратора 8.1, 8.2, 8.3, многоканальный аналого-цифровой преобразователь 9 и микроконтроллер 10. Интегратор (на примере интегратора 8.1) состоит из первого 8.1.1. резистора, второго 8.1.2 резистора, операционного усилителя 8.1.3, конденсатора 8.1.4, электромеханического реле с нормально разомкнутыми контактами 8.1.5 и с катушкой 8.1.6.
Работает устройство следующим образом.
Снаряд-топограф вводится в шлюзовую камеру (камеру для запуска очистных поршней) газопровода (трубопровода), не показанную на рисунке. Закрывается крышка камеры и камера заполняется газом. При давлении в камере около 0.5 МПа специальным реле (не показано) включается электропитание бортовой аппаратуры. После уравнивания давления в камере и в трубопроводе специалисты, обслуживающие линейную часть газопровода, открывают кран, отсекающий камеру запуска от линейной части газопровода, и переключают направление потока газа из компрессорной станции от входа в линейную трубу на подачу его в камеру запуска. Давление газа в камере запуска возрастает, и газ 14 начинает давить на переднюю манжету 2 снаряда, проталкивая его в трубу 13. После того как снаряд войдет в трубу 13 полностью задняя манжета 3 перекрывает сечение трубы, и газ перетекает через отверстия в задней манжете 3, продолжая давить на переднюю манжету 2, чем обеспечивается устойчивое движение снаряда в трубе, устраняя его возможные перекосы. Колесо датчика пути 4 прижимается к стенке трубы и катится по ее поверхности благодаря трению. Сигналы датчика пути 4 вводятся через гермоввод (на рисунке не показан) в полость герметичного контейнера 1 и подаются на соответствующий вход микроконтроллера 10. Сигналы датчика пути представляют собой импульсы, следующие после прохождения колесом по трубе заданного отрезка пути (2, 5, 10 или другое количество миллиметров). Обнаружив поступление очередного импульса от датчика пути 4, микроконтроллер 10 вычисляет значение пути и инициализирует программу сбора данных от датчиков через аналого-цифровой преобразователь 9. Аналого-цифровой преобразователь (АЦП) 9 настраивается на опрос источника сигнала, подключенного к его первому аналоговому входу. После завершения преобразования аналогового сигнала в двоичный код АЦП 9 по соответствующему проводу выдает инициализирующий бит на соответствующий вход микроконтроллера 10 и микроконтроллер 10 по соответствующим шинам вводит код из АЦП 9 в собственную память. После этого микроконтроллер 10 опрашивает остальные каналы АЦП 9, и информация от всех датчиков накапливается в памяти микроконтроллера 10. Накопленную информацию микроконтроллер 10 передает по соответствующим интерфейсным шинам в бортовой компьютер 11. После накопления определенного объема данных бортовой компьютер 11 уплотняет информацию и переписывает ее из собственной памяти в бортовой накопитель данных 12.
Если движение снаряда по трубе равномерное, то не наблюдается изменений ускорений. Если отсутствуют повороты снаряда, то отсутствуют сигналы от датчиков угловых скоростей. Однако на выходах датчиков линейных ускорений всегда присутствуют электрические сигналы, возникающие из-за действия силы Земного притяжения при произвольном положении снаряда в полости трубы. Негоризонтальность продольной оси трубы приводит к наклону продольной строительной оси (OX1) снаряда относительно горизонтальной поверхности земли. Ось чувствительности акселерометра 7.1 оказывается неперпендикулярной к вектору ускорения силы тяжести. Вектор g ускорения силы тяжести дает проекцию на ось чувствительности акселерометра 7.1, и на его выводах появляется электрический сигнал, пропорциональный синусу угла θ наклона оси трубопровода относительно горизонтальной плоскости в инерциальных координатах Земли:
U7.1=K7.1·W1=K7.1·(g·sinθ+V'1),
где К7.1 - коэффициент преобразования датчика ускорения 7.1,
V'1 - производная по времени от скорости вдоль оси OX1,
W1 - ускорение направленное вдоль оси OX1.
Оцифрованное значение напряжения, пропорционального ускорению W1, регистрируется в накопителе и может использоваться для оценки угла наклона продольной оси трубопровода.
На Фиг.2 видно, что акселерометры 7.2 и 7.3 ориентированы осями чувствительности вдоль строительных осей OX2 и ОХ3 (связанной подвижной системы координат OX1Х2Х3). При вращении аппарата вокруг оси OX1 на выходах акселерометров 7.2 и 7.3 будут формироваться сигналы, связанные с углом γ поворота вокруг оси ОХ1 в соответствии с выражением:
U7.2=K7.2·W2=K7.2·(g·cosγ·cosθ+ωX3·Vx1)+Uш2;
U7.3=К7.3·W3=K7.3·(g·sinγ·cosθ+ωX2·Vx1)+Uш3
Сигналы акселерометров 7.2 и 7.3 содержат компоненты, пропорциональные линейным ускорениям, направленным вдоль осей OX2 и ОХ3 связанной системы. Эти сигналы несут информацию об угле крена γ аппарата и могут быть использованы для оценки крена при анализе зарегистрированных аппаратом данных.
В процессе движения по трубопроводу в сигналах акселерометров появляются составляющие Uш2 и Uш3, порождаемые вибрациями и ударами, ориентированными в разных направлениях, и температурными смещениями нуля. Сигналы с выходов акселерометров 7.2 и 7.3 поступают на соответствующие входы 5 и 6 АЦП 9, кодируются им и считываются микроконтроллером 10. Считывание информации происходит всякий раз, как только колесо одометра пройдет путь ΔS, определяемый конструкцией одометра. Одометр формирует инициализирующий импульс, поступающий на соответствующий вход микроконтроллера 10. Микроконтроллер производит запуск АЦП 9 и поочередно считывает из АЦП 9 кодированные сигналы всех датчиков, подключенных к аналоговым входам АЦП.
Датчики угловых скоростей 6.1, 6.2, 6.3 ориентированы (Фиг.2) осями чувствительности вдоль осей связанной с объектом подвижной ортогональной системы OX1, OX2, ОХ3 соответственно. При движении снаряда в трубе на выходах датчиков формируются электрические сигналы Uв1, Uв2, Uв3, порождаемые угловыми вибрациями корпуса снаряда, и сигналы, порождаемые вращениями снаряда в пространстве. Учитывая, что снаряд предназначен для восстановления углов ориентации продольной оси трубы в координатах невращающейся горизонтальной системы Oξηζ, следует отметить, что все повороты связанной со снарядом подвижной системы ОХ1Х2Х3 должны быть использованы для восстановления углов курса ψ (или азимута) трубопровода и углов θ изменения наклона местности в зоне прокладки трубопровода.
Конечные повороты на углы Эйлера-Крылова в последовательности ψ-θ-γ позволяют установить зависимость проекций угловых скоростей на координаты связанной с объектом системы ОХ1Х2Х3 с абсолютными угловыми скоростями объекта в системе Оξηζ (Фиг.3). [Пельпор Д.С. и др. Гироскопические приборы и системы. М.: Высш. шк. 1988 - 424 с. 6 ил.]. В соответствии с кинематическими уравнениями конечных поворотов можно выразить зависимости выходных сигналов U6.1, U6.2, U6.3 датчиков угловых скоростей 6.1, 6.2, 6.3:
U6.1=К6.1·ωx1=К6.1·(γ'+ψ'·sinθ+ωпх1+ωв1);
U6.2=К6.2·ωx2=К6.2·(ψ'·cosθ·cosγ+θ'·sinγ+ωпх2+ωв2);
U6.3=К6.3·ωх3=К6.3·(-ψ'·cosθ·sinγ+θ'·cosγ+ωпх3+ωв3),
где γ - угол крена (поворота вокруг оси ОХ1) аппарата или вокруг оси Oξ, правой сопровождающей горизонтальной системы Оξηζ, (Фиг.3),
γ' - угловая скорость вращения аппарата вокруг продольной оси Oξ,
ψ - угол рысканья аппарата вокруг оси Оη (оси, ориентированной из центра Земли в зенит),
ψ' - угловая скорость рысканья,
θ - угол тангажа аппарата (угол поворота аппарата вокруг оси Oζ, направленной в правую сторону правой сопровождающей аппарат горизонтальной невращающейся системы Oξηζ),
ωпx1, ωпх2, ωпх3 - переносные угловые скорости,
ωв1, ωв2, ωв3 - угловые скорости вибраций относительно соответствующих осей связанной системы ОХ1Х2Х3.
Мешающими факторами в сигнале датчиков угловых скоростей являются угловые скорости ωв1, ωв2, ωв3 угловых колебаний снаряда (вибраций) вокруг соответствующих осей. Эти колебания благодаря установке контейнера снаряда на упругоэластичных полиуретановых манжетах имеют синусоидальный закон изменений и происходят с некоторой частотой, определяемой массогабаритными характеристиками снаряда, упругостью и размерами эластичных манжет, скоростью движения снаряда в трубе и видом транспортируемого по трубе продукта (жидкость или газ).
Положим, что колебания происходят с некоторой угловой частотой Ω. Закон изменения угловых колебаний во времени описывается выражением:
α=αмах·sin( Ω·t),
где αмах - наибольшее угловое отклонение (амплитуда).
Отсюда угловая скорость для этих колебаний найдется как первая производная по времени
ωв=α'(t)=αмах· Ω·cos( Ω·t)=ωmax·cos( Ω*t)
Обычно возникают сложные колебания и для их подавления прибегают к использованию различного вида амортизаторов [Варламов Р.Г. (ред.) Справочник конструктора РЭА. - М.: Сов. радио, 1980. - 480 с. ил]. Это усложняет металлоконструкцию аппаратного комплекса. Использование механических амортизаторов не позволяет подавить мешающие колебания до значений, позволяющих получить допустимую величину ошибки при оценке углов ориентации ψ, θ, γ.
Если сигналы с выходов датчиков угловой скорости (ДУС) подвергнуть интегрированию, то на выходе, например, интегратора 8.1 получим сигнал:

где Ui1 - выходное напряжение интегратора (индекс i) первого (индекс 1);
Ki - коэффициент интегрирования;
U61 - выходное напряжение первого ВОГ;
US61 - напряжение полезной составляющей в сигнале первого ВОГ;
Un61 - напряжение мешающей составляющей в сигнале первого ВОГ,
U0 - начальное напряжение на выходе интегратора.
В правой части уравнения первый интеграл отображает полезный сигнал, а второй - мешающую составляющую от угловых колебаний. Рассмотрим интеграл от аддитивной вибрационной помехи отдельно.
Из этого выражения видно, что на выходе интегратора сигнал от угловых колебаний будет ослаблен в Ki/ Ω=Ki/2πf раз (f - частота угловых колебаний).
Таким образом, с помощью интегрирования сигналов датчиков угловой скорости можно добиться усиления низкочастотной части сигнала и подавить высокочастотные помехи.
Предположим, что требуется повысить в 10 раз чувствительность (крутизну преобразования) датчика угловой скорости. Это часто необходимо при обследовании внутритрубными снарядами-топографами пространственного положения подводных трубопроводов и трубопроводов, проложенных в оползневой зоне, где искривление пространственного положения оси трубопровода зачастую незаметно при визуальном контроле. Смещение продольной оси трубы в пределах десятых долей градусов требует или применения дорогостоящей инерциальной аппаратуры, или использования усиления (в допустимых пределах) выходного сигнала датчика угловой скорости. Допустим, что мы прибегли к обычному усилителю с коэффициентом усиления 10. В этом случае вместе с полезным сигналом усиливается и сигнал помехи. Для подавления вибрационных помех в прототипе применяют механические амортизаторы. При использовании механических амортизаторов типа АП, АЧ, AM, АПН и др. мешающие вибрации на частоте, например, 10 Гц могут быть ослаблены не более чем в 5-10 раз [Афонин П.М. и др. Беспилотные летательные аппараты. М.: Машиностроение. 1967 г. с.337-338], [Фролов К.В. (ред.) Вибрации в технике. Справочник т.6, М: Машиностроение, 1995 г. стр.203-224].
Если использовать интегратор с коэффициентом передачи Ki=10, то усиленная помеха с частотой 10 Гц ослабится в 2πf=6,28·10=62,8 раз, то есть в 6 раз эффективнее по сравнению со случаем использования механических амортизаторов. Таким образом, применение интегрирования дает полезный технический эффект.
В процессе движения по трубопроводу диагностический снаряд преодолевает не только плавные, но и крутые изгибы, где угловая скорость может достигать десятков и сотен градусов в секунду. При выбранном усилении сигнал ДУС на верхней угловой скорости будет передаваться с сильными частотными и нелинейными искажениями. В большой степени погрешность определяется ограниченностью динамического диапазона усилителя, приводящей к ограничению верхнего уровня сигнала. Восстановить верхнее значение угловой скорости при наличии в усилителе амплитудных ограничений уже невозможно.
Сужение диапазона преобразуемых угловых скоростей - это второй недостаток повышения чувствительности системы измерения угловых скоростей путем простого усиления сигнала ДУС.
Использование интегратора позволяет получить наперед заданную чувствительность системы с одновременным ослаблением мешающих синусоидальных сигналов. Изменение угловых скоростей на поворотах - процесс более медленный, чем изменения составляющих угловой скорости, происходящие в процессе вибрационных колебаний.
Рассмотрим фиг.2, на ней представлена электрическая схема измерительного модуля. На схеме три одинаковых канала измерения углов ориентации. Коэффициент передачи интегратора, реализуемого с использованием операционного усилителя с емкостью в цепи отрицательной обратной связи и с резистором в прямой цепи, описывается выражением [Урмаев А.С. Основы моделирования на аналоговых вычислительных машинах. М.: Наука, 1974, 320 с.]:
Ki=1/RC.
Рассмотрим числовой пример.
Пусть требуется установить коэффициент передачи интегратора, равный 10.
Возьмем конденсатор емкостью 1 мкФ=10-6 Ф.
Величину сопротивления резистора в прямой связи найдем так:
R=1/(Ki·C)=106/10=105 Ом=100 кОм.
Допустим, что интегратор питается от источника с напряжением ±5 В. Предельное изменение напряжения на выходе интегратора не может превышать напряжения питания. Полный диапазон одностороннего изменения интегрируемой величины можно определить, используя выбранный коэффициент передачи интегратора и известный предел изменения выходной величины. Пусть производится интегрирование выходного сигнала волоконно-оптического гироскопа ВГ 949 с чувствительностью 6,8 мВ/(град/с), преобразующего вращение с постоянной угловой скоростью 300 град/с. Сигнал на выходе ВОГ будет 6,8·300=2,04 В. Время ti, пo истечении которого интеграл достигнет напряжения 5 В, будет равно:
ti=5/(Ki·2,04)=0,245 с.
Выходное напряжение на выходе интегратора будет соответствовать углу поворота:
ϕ=ω·ti=300·0,245=73,5 град.
Если вращение будет происходить с угловой скоростью 0,004 град/с (угловая скорость, близкая к угловой скорости вращения Земли), то выходной сигнал ВОГ будет равен 6,8·0,004=0.0272·10-3 В.
Время интегрирования, по истечении которого будет достигнуто предельное напряжение на выходе интегратора, равно:
ti=5·103/(Ki·0,0272)=18348 с.
Выходное напряжение на выходе интегратора будет соответствовать углу поворота:
ϕ=ω·ti =0,004·18348=73,5 град.
Из примера видно, что использование интегратора позволяет обеспечить формирование значений углов поворота при изменении угловых скоростей поворотов в широком диапазоне (диапазон изменения скоростей в приведенном примере 300/0.004=75000). Экспериментальная проверка, проведенная с волоконно-оптическим гироскопом ВГ949, подтверждает чувствительность предлагаемого решения к угловой скорости суточного вращения Земли.
Продолжим рассмотрение работы устройства на примере интегратора 8.1.
Если вращение ДУС будет продолжаться дольше времени, допустимого до достижения режима насыщения интегратора, то интегратор войдет в режим насыщения и будут сильно искажены результаты интегрирования. Чтобы избежать насыщения интегратора, напряжение с выхода операционного усилителя 8.1.3 преобразуется в двоичный код с помощью АЦП 9 и вводится с определенной периодичностью в микроконтроллер 10. Программно в микроконтроллере 10 происходит сравнение напряжения, введенного из интегратора 8.1, с заданным наперед числом, соответствующим напряжению, при котором интегратор продолжает работать в линейном режиме, например ±4 В. Если напряжение на выходе интегратора 8.1 достигло этого предела, то программа микроконтроллера 10 формирует команду, по которой на катушку 8.1.6 соответствующего электромагнитного реле подключается напряжение, при котором электромагнитное реле замыкает свои контакты 8.1.5. Конденсатор 8.1.4 интегратора начинает разряжаться через замкнутые контакты реле. Напряжение с выхода интегратора 8.1 через АЦП 9 вводится в микроконтроллер 10 и контролируется его программой. В тот момент, когда напряжение на выходе интегратора 8.1 достигнет нулевого значения, микроконтроллер 10 отключает катушку 8.1.6 реле от источника электропитания и контакты реле 8.1.5 размыкаются. Теперь интегрирование продолжится с нулевыми начальными условиями. Значение интеграла перед срабатыванием реле сохраняется в памяти микроконтроллера 10.
Таким образом, осуществляется защита интегратора от выхода в режим насыщения. Использование быстродействующего реле позволяет производить обнуление интегратора в течение коротких временных интервалов, что незначительно искажает значение суммарного угла, формируемого суммированием на стационарной ЭВМ интегральных «кусков» при обработке записанных аппаратурой снаряда данных. В память бортового компьютера записывается интегрируемая величина, представленная отдельными «кусочными» таблично заданными функциями, которые должны быть склеены (конец одной функции с началом другой) в вычислителе для восстановления истинного значения интеграла за все время движения диагностического аппарата в трубопроводе.
Предлагаемое решение позволяет повысить чувствительность измерительного модуля и сохранить его работоспособность в широком диапазоне угловых скоростей, а также подавить в значительной степени мешающее воздействие угловых вибраций.
Для определения курса ψ, тангажа θ и крена γ внутритрубного снаряда-топографа обычно используются формулы, связывающие угловые скорости ω1, ω2, ω3, измеряемые датчиками угловых скоростей, ориентированными по осям ОХ1Х2Х3 связанной с аппаратом ортогональной правой системы, и угловые скорости ψ', θ', γ', наблюдаемые в сопровождающей аппарат невращающейся горизонтальной системе. [Афонин П.М. и др. Беспилотные летательные аппараты. М.: Машиностроение, 1967 г. 439 с., ил. С.139], [Пельпор Д.С. и др. Гироскопические приборы и системы. М. Высш. шк. 1988 - 424 с. 6 ил. с 319]:



Если подвергнуть уравнения (1)-(3) интегрированию на коротком временном интервале ΔТ, то с достаточной для практического использования точностью можно считать постоянными значения углов γ и θ и вынести из под знака интеграла sinγ, tanθ и cosγ. После интегрирования вместо значений угловых скоростей в уравнениях появятся приращения углов Δϕ, Δγ, Δθ, Δϕ1, Δϕ2, Δϕ3. Так как запоминание значений интегралов ведется с определенным шагом, в пространстве равным шагу ΔS одометра, а по времени ΔТ шагу одометра, деленному на скорость движения, то в память микроконтроллера оказываются вводимыми дискретные значения интегралов, считанные в i-й момент.



где
Δψi - приращение угла рыскания в i-й момент;
Δθi - приращение угла тангажа в i-й момент;
Δγi - приращение угла крена в i-й момент;
ψi - угол курса в i-й момент;
θi-1 - угол тангажа в i-й момент;
γi-1 - угол крена в i-й момент;
ϕ1i, ϕ2i, ϕ3i - углы, полученные на выходе интеграторов 8.1, 8.2, 8.3 в i-й момент дискретизации времени (пути).
Так как запись данных в память бортового компьютера производится в дискретные моменты времени, однозначно привязанные к изменениям ΔS проходимого снарядом пути, и время для каждого дискретного момента запоминается вместе со значениями углов, получаемых на выходах интеграторов, то все вычисления по формулам (4), (5), (6) легко производятся при анализе записи, полученной во время движения по трубе. Запись представляет собой таблицу, каждая строка которой представляет собой значения ускорений и угловых скоростей, наблюдавшиеся в точке траектории, соответствующей рассматриваемой строке. Строки таблицы следуют с интервалом, равным шагу одометра ΔS. Для анализа такой таблично заданной функции используется стационарная ЭВМ, в которую собранные снарядом данные перегружаются из бортового накопителя 12. Благодаря использованию интеграторов на выходе ДУС данные, относящиеся к угловой информации, свободны от большинства шумов и содержат информацию об изменениях угла, как на больших, так и на малых угловых скоростях поворотов диагностического снаряда в трубопроводе. Табличная форма представления зарегистрированной информации позволяет простым способом находить изменения углов Δϕ1i, Δϕ2i, Δϕ3i, вычитая из параметра ϕiJ соответствующего столбца J текущей строки i значение параметра ϕ(i-1)J из того же столбца J предыдущей строки (i-1).

где
ϕi-1 - угол, накопленный на (i-1)-м шаге одометра;
Δϕi - приращение угла для i-го шага;
ϕi - текущий угол на выходе интегратора в i-й момент;
i - номер шага одометра
J∈{1,2,3} - индекс, соответствующий номеру оси координат связанной с объектом системы.
По найденным в (4), (5), (6) значениям приращений углов Δψ, Δγ, Δθ находятся текущие значения углов ориентации в координатах невращающейся горизонтальной системы Oξηζ


Текущие координаты трубопровода, с началом координат в камере запуска, вычисляются для каждого шага одометра с использованием текущих значений углов ориентации, вычисленных по уравнениям (8)-(10), и известного шага ΔS одометра:


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| ВНУТРИТРУБНЫЙ ПРОФИЛОМЕТР | 2014 |
|
RU2572221C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |

Изобретение относится к области неразрушающего контроля и может быть использовано для проверки пространственного положения магистральных трубопроводов большой протяженности и привязки их продольной оси к топографическим или географическим картам. Устройство состоит из герметичного контейнера, эластичных манжет в передней и задней частях контейнера и содержит датчики пути, приборные узлы, закрепленные внутри корпуса, бортовой компьютер, накопитель для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль, содержащий три ортогонально расположенных волоконно-оптических гироскопа и три ортогонально расположенных акселерометра. Измерительный модуль содержит три интегрирующих узла, многоканальный аналого-цифровой преобразователь и микроконтроллер. Каждый интегрирующий узел состоит из операционного усилителя, конденсатора, первого и второго резисторов, быстродействующего электромагнитного реле, с нормально разомкнутыми контактами. Сигнальные выходы волоконно-оптических гироскопов соединены со входами соответствующих интегрирующих операционных усилителей, параллельно интегрирующим конденсаторам которых подключены нормально разомкнутые контакты быстродействующих электромагнитных реле, управляемых от микроконтроллера, в который через аналого-цифровой преобразователь вводятся выходные сигналы интеграторов. При достижении напряжением одного из интеграторов заранее заданного напряжения происходит включение соединенного с этим интегратором реле, контакты которого замыкают обкладки конденсатора, и напряжение на конденсаторе падает до нуля. При нулевом напряжении на обкладках конденсатора микроконтроллер отключает реле. Двоично-кодированные значения напряжений, действующих на выходах интеграторов, датчиков ускорений, накапливаются в памяти микроконтроллера, а затем переписываются в память бортового компьютера для упаковки информации и переписи ее в бортовой накопитель данных. Накопленная информация переписывается в стационарную ЭВМ для анализа в лабораторных условиях. Техническим результатом является высокая чувствительность к малым значениям угловых скоростей поворотов движущегося в трубопроводе топографического снаряда, широкий диапазон допустимых угловых скоростей, с которыми внутритрубный снаряд-топограф может проходить продольные изгибы трубопровода, а также низкая чувствительность топографической аппаратуры к угловым вибрациям. 3 ил.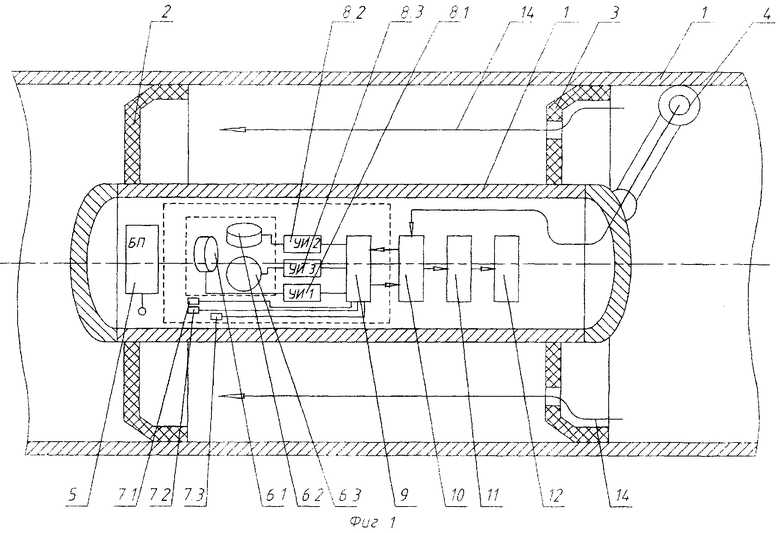
Устройство внутритрубной диагностики, состоящее из герметичного контейнера, эластичных манжет в передней и задней частях контейнера с датчиками пути и приборными узлами, закрепленными внутри корпуса с бортовым компьютером и накопителем данных для регистрации сигналов датчиков, аккумуляторными батареями и измерительным модулем, содержащим три ортогонально расположенных волоконно-оптических гироскопа и три ортогонально расположенных акселерометра, отличающееся тем, что в измерительный модуль введены первый, второй и третий интегрирующие узлы, многоканальный аналого-цифровой преобразователь и микроконтроллер, причем каждый интегрирующий узел состоит из операционного усилителя, конденсатора, первого и второго резисторов, быстродействующего электромагнитного реле, содержащего катушку и нормально разомкнутые контакты, при этом сигнальный выход соответствующего волоконно-оптического гироскопа соединен с первым выводом первого резистора соответствующего интегрирующего узла, второй вывод первого резистора соединен с инвертирующим входом соответствующего операционного усилителя, к выходу которого подключен первый вывод конденсатора, второй вывод которого подключен к инвертирующему входу этого же операционного усилителя и подключен к неподвижному контакту электромагнитного реле, подвижный контакт которого соединен с выходом этого же операционного усилителя, первый вывод катушки электромагнитного реле соединен с положительным выводом источника электропитания, а второй вывод катушки электромагнитного реле соединен с соответствующим выходом микроконтроллера, интерфейсные входы ввода данных которого соединены с соответствующими выходами многоканального аналого-цифрового преобразователя, входы управления которого соединены с соответствующими выходами микроконтроллера, а соответствующие аналоговые входы многоканального аналого-цифрового преобразователя соединены с выходами соответствующих акселерометров и датчиков температуры и с выходами соответствующих операционных усилителей соответствующих интегрирующих узлов, а неинвертирующие входы операционных усилителей интегрирующих узлов соединены с первым выводом соответствующего второго резистора, второй вывод которого соединен с общим выводом соответствующего волоконно-оптического гироскопа, причем шины управления и шина данных микроконтроллера соединены с соответствующими шинами бортового компьютера.
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РЕГИСТРАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДОВ | 1994 |
|
RU2102704C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СКВАЖИННЫЙ ЗОНД ИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА | 1992 |
|
RU2053358C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 4799391 A, 24.01.1989. | |||

