Настоящее изобретение относится к контрольно-измерительной технике и технике машинного зрения, осуществляющей преобразование световой информации в электрическую, и может быть использовано для измерения положения одного или двух источников светового (видимого и ИК диапазонов) сигнала при наличии неравномерного фонового шума, с контролем видеоизображения в режиме реального времени.
Известно устройство измерения координат, описанное в публикации [1].
Устройство, согласно [1], имеет в своем составе следующие блоки:
- КМОП-сенсор,
- блок вычисления двумерных координат,
- блок вывода видеоизображения,
- блок синхронизации.
Данное устройство имеет следующие недостатки:
- сниженная разрешающая способность и световая чувствительность сенсора ввиду разделения каждого пиксела КМОП-сенсора на отдельные элементы, отвечающие за вывод видеоизображения и определение координат,
- отсутствие подавления шумов КМОП-сенсора, что ухудшает точность определения координат,
- отсутствие подавления фоновой засветки КМОП-сенсора, неравномерность которой приводит к ошибкам вычисления двумерных координат,
- отсутствие возможности вычисления угла поворота изображения одного источника света относительно другого,
- выполнение блоков приема и обработки изображений в виде отдельных устройств.
Наиболее близким техническим решением к предлагаемому изобретению является система измерения позиции, включающая источники света и устройство измерения координат [2].
Ряд недостатков устройства [1] устранен в устройстве измерения координат [2], выбранном в качестве прототипа, включающем:
- блок приема изображения на основе КМОП-сенсора,
- блок синхронизации,
- блок вычисления двумерных координат,
- блок вычисления площади засветки от одного или двух источников света,
- блок вычисления расстояния до источника света.
Однако использованное в прототипе техническое решение не вполне обеспечивает требуемые в контрольно-измерительной технике и технике машинного зрения скорость и точность измерения координат и уровень надежности:
- так использование в прототипе метода подавления шумов изображения с помощью обработки нескольких накопленных кадров изображения в блоке памяти изображений обеспечивает сравнительно низкое соотношение сигнал-шум, а также предопределяет низкую скорость и точность вычисления и существенно усложняет конструкцию устройства,
- имеет место относительно низкая точность определения двумерных координат и площади засветки, обусловленная отсутствием средств подавления фоновой засветки,
- устройство прототипа представляет собой совокупность отдельных блоков, что снижает надежность и долговечность, увеличивает габаритные размеры, вес и стоимость.
Кроме того, устройство в прототипе не обеспечивает достаточную информативность об изменении местоположения источников света друг относительно друга (в частности, угла поворота), а также не предусматривает возможность визуально контролировать в реальном времени видеоизображение и перемещение источников света.
Задачей настоящего изобретения является получение технического результата, заключающегося в повышении скорости и точности вычисления координат и площади засветки, в увеличении соотношения сигнал-шум, в возможности обеспечения визуального контроля и повышения информативности о местоположении источников света, а также в увеличении надежности и долговечности устройства, снижении его габаритных размеров, веса и стоимости за счет интегрального исполнения блоков устройства на одном кристалле.
Для достижения названого технического результата устройство измерения координат [2], содержащее блок приема изображения на основе КМОП-сенсора, блок синхронизации, блок вычисления двумерных координат, блок вычисления площади засветки от одного или двух источников света, выполняют в интегральном исполнении и включают в него блоки, являющиеся отличительными признаками предлагаемого устройства:
- блок подавления шумов и фоновой засветки,
- блок управления экспозицией и длительностью времени люминесценции источников света,
- блок усиления и сдвига видеосигнала,
- блок вывода видеоизображения,
- блок вычисления угла поворота одного источника света относительно другого.
Данная совокупность отличительных признаков позволяет решить поставленную задачу.
Блок подавления шумов и фоновой засветки предлагается ввести вместо блока памяти видеоизображений, описанного в прототипе. Алгоритм подавления шумов в прототипе основан на накоплении нескольких кадров изображения источников света и последующей их обработке. Однако такой способ подавления шумов не устраняет фоновую засветку на видеоизображении. Неоднородность и возможный высокий уровень сигнала фоновой засветки будут приводить не только к снижению точности вычислений, но и к ошибкам. В блоке подавления шумов и фоновой засветки используется программируемое пороговое значение сигнала или несколько пороговых значений, с которым сравнивается информационный сигнал от КМОП-сенсора. Информационный сигнал ниже (выше) этих пороговых значений считается неинформативным, отбрасывается внутренними схемами обработки и не участвует в дальнейших вычислениях. Таким образом, в информационном видеосигнале КМОП-сенсора можно устранить не только шумы видеоизображения, но и фоновый сигнал освещения. Используемый блок производит подавление шумов непосредственно при поступлении сигнала, не требуя накопления нескольких кадров видеоизображения, что повышает не только точность, но и скорость вычислений.
Использованный блок управления экспозицией КМОП-сенсора и длительностью времени люминесценции внешних управляемых источников света выполняет функцию увеличения соотношения сигнал-шум. Увеличивая экспозицию и время люминесценции источников света, можно тем самым увеличить амплитуду информационного сигнала КМОП-сенсора по отношению к шуму, например к геометрическому шуму сенсора. Отсутствие блока управления экспозицией и длительностью времени люминесценции в прототипе обусловлено наличием в прототипе блока вычисления расстояния от блока приема изображения на основе КМОП-сенсора до источника света, работа которого основана на взаимосвязи этого расстояния и площади засветки и несовместима с указанными блоками, т.к. это изменило бы площадь засветки.
Вводимый блок усиления и сдвига видеосигнала позволяет подстраивать выходной информационный сигнал КМОП-сенсора под условия работы внутренних схем обработки и вычислений (например, входной диапазон АЦП). С помощью данного блока производится калибровка устройства, когда необходима корректировка, например, сдвигов внутренних опорных напряжений или сдвига уровня нулевого сигнала (уровня черного), обусловленных изменением температуры окружающей среды, старением и другими факторами. Таким образом, увеличиваются ремонтопригодность и долговечность устройства.
Блок вывода видеоизображения представляет собой дополнительный видеоинтерфейс. Вывод видеоизображения в реальном времени на внешние источники отображения позволяет визуально контролировать процесс изменения местоположения источников света, измерения координат, визуально контролировать калибровку устройства, а также выдавать видеоизображение объектов, попавших в поле зрения КМОП-сенсора.
Блок вычисления угла поворота одного источника света вокруг другого позволяет добавить одну степень свободы к двумерным координатам и тем самым увеличить информативность об изменении положения источников света друг относительно друга. Данный блок управляется блоком синхронизации, который включает внешние источники света последовательно в соответствии с кадровой синхронизацией КМОП-сенсора так, что каждый последующий кадр содержит видеоизображение только одного источника света. Вычислив координаты источников света в двух соседних кадрах, блок измерения угла поворота измеряет угол поворота одного источника света относительно другого.
Устройство, описанное в прототипе [2], представляет собой совокупность блоков, которые представляют собой, по сути, отдельные устройства, что снижает надежность, долговечность, ремонтопригодность, увеличивает габаритные размеры, вес и стоимость всего устройства. Так БИС, используемая в прототипе, включает в себя только блок приема изображения на основе КМОП-сенсора, блок вычисления двумерных координат и блок вычисления площади засветки, а ряд блоков, таких как блок синхронизации и блок вычисления расстояния до источника света, является отдельными от БИС блоками.
Заявляемое же устройство представляет собой один кристалл БИС, что устраняет перечисленные недостатки прототипа и позволяет использовать его в миниатюрных устройствах с батарейным питанием.
Фиг.1 иллюстрирует конструкцию устройства на уровне блоков БИС (нумерация и названия блоков представлены на фиг.1).
Предлагаемое устройство работает следующим образом.
Изображение расположенных вне устройства источников света 1а и 1б через линзу (или диафрагму) 2 проецируется на фоточувствительную плоскость КМОП-сенсора блока приема изображения 4. Сигнал сенсора, содержащий видеокартинку захватываемого изображения, поступает в блок усиления и сдвига видеосигнала 5. Калиброванный видеосигнал через блок вывода изображения 6 может быть выведен на внешнее устройство отображения 7 для визуального контроля в режиме реального времени. Также видеосигнал проходит через блок подавления шумов и фоновой засветки 8, где сравнивается с пороговыми значениями сигналов, которые задаются (пользователем или заводом-изготовителем) в блоке внутренних регистров 9. Калиброванный и свободный от шумов сигнал поступает в блок вычислений 10. Блок вычислений 10 состоит из трех блоков: блока измерения двумерных координат 11, блока измерения площади засветки от источников света 12 и блока измерения угла поворота одного источника света вокруг другого 13. Результаты вычислений сохраняются в блоке внутренних регистров 9. Одновременно блок внутренних регистров 9 задает режим работы блока управления экспозицией и длительностью времени люминесценции 14. Увеличивая время экспозиции и время люминесценции внешних источников света 1а и 1б, блок управления экспозицией и длительностью времени люминесценции 14 позволяет увеличить амплитуду информационного сигнала по отношению к шумам, например, в условиях плохой видимости (увеличение запыленности среды и т.п.). Запись значений регистров блока внутренних регистров 9 и считывание результатов измерений осуществляется внешним устройством приема-выдачи данных 15 (например, ПК) через блок ввода-вывода 16, который представляет собой цифровой интерфейс связи. Блок синхронизации 17 обеспечивает синхронное взаимодействие всех внутренних блоков устройства 3 и попеременное включение внешних источников света 1а и 1б (в соответствии с кадровой синхронизацией КМОП-сенсора) в режиме работы устройства 3 с двумя источниками света. При режиме работы устройства 3 с одним источником света (задается блоком внутренних регистров 9) блок синхронизации 17 обеспечивает включение только одного источника света, при этом блок вычисления угла поворота 13 отключается. Блок опорных напряжений 18 задает требуемые напряжения питания микросхемы и опорные напряжения внутренних схем всех блоков устройства 3.
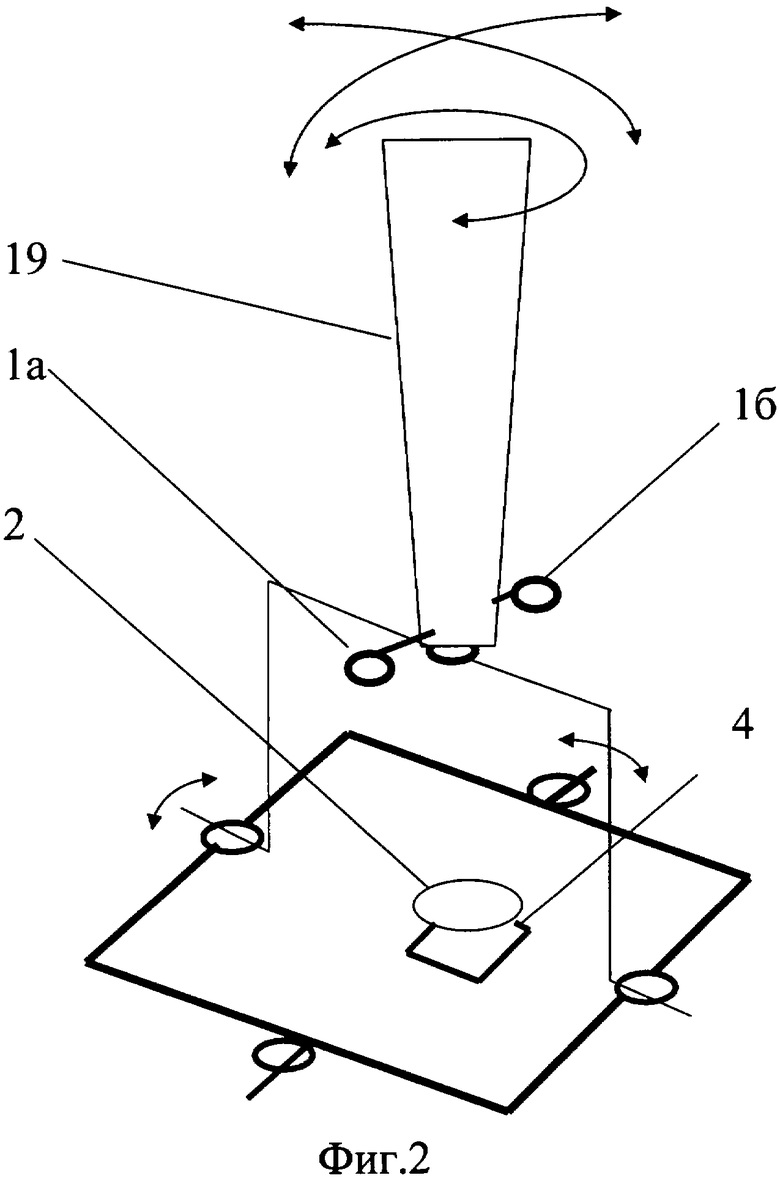
Фиг.2 иллюстрирует принцип построения оптического джойстика на основе заявляемого устройства.
Предлагаемое устройство компьютерного джойстика на основе кристалла БИС заявляемого устройства содержит подвижную рукоятку управления 19, способную совершать отклонения от центрального положения в трех степенях свободы: отклонения вокруг двух осей, перпендикулярных друг другу (координаты Х и Y), и поворот вокруг своей оси (угол поворота). На одном конце рукоятки установлены внешние управляемые источники света так, что их изображение проецируется (с помощью линзы 2 или диафрагмы) на фоточувствительную плоскость заявляемого устройства, расположенного перпендикулярно оси вращения рукоятки.
Настоящее описание изобретения, в том числе состава и работы интегральной схемы, включая предлагаемый вариант ее исполнения, предполагает дальнейшее возможное совершенствование специалистами и не содержит каких-либо ограничений в части реализации. Все притязания сформулированы исключительно в формуле изобретения.
Литература
1. Yukinobu Sugiyama, "A High-Speed CMOS Image Sensor With Profile Data Acquiring Function", IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL.40, NO.12, DECEMBER 2005.
2. Патент JP 2001059706.
Оптический сенсор измерения координат содержит блок приема изображения на основе КМОП-сенсора, блок синхронизации, блок вычислений, включающий блок вычисления двумерных координат и блок вычисления площади засветки от одного или двух источников света. Оптический сенсор выполнен в интегральном исполнении и дополнительно включает блок управления экспозицией и длительностью времени люминесценции одного или двух источников света, увеличивающий амплитуду сигнала КМОП-сенсора по отношению к шуму, блок вычисления угла поворота одного источника света относительно другого, входящий в блок вычислений, блок усиления и сдвига видеосигнала, блок подавления шумов и фоновой засветки, блок внутренних регистров, блок вывода изображения. Сигнал с блока приема изображения поступает в блок усиления и сдвига видеосигнала, затем видеосигнал проходит через блок подавления шумов и фоновой засветки, где сравнивается с пороговыми значениями сигналов, заданных в блоке внутренних регистров, и поступает в блок вычислений. Результаты вычислений сохраняются в блоке внутренних регистров, который задает режим работы блока управления экспозицией и длительностью времени люминесценции источников света. К блоку усиления и сдвига видеосигнала подключен блок вывода изображения, а блок синхронизации обеспечивает синхронное взаимодействие всех блоков оптического сенсора. Технический результат - повышение скорости и точности вычисления координат и площади засветки, увеличение соотношения сигнал-шум, обеспечение визуального контроля и повышение информативности о местоположении источников света, а также увеличение надежности и долговечности устройства, уменьшение габаритных размеров. 2 ил.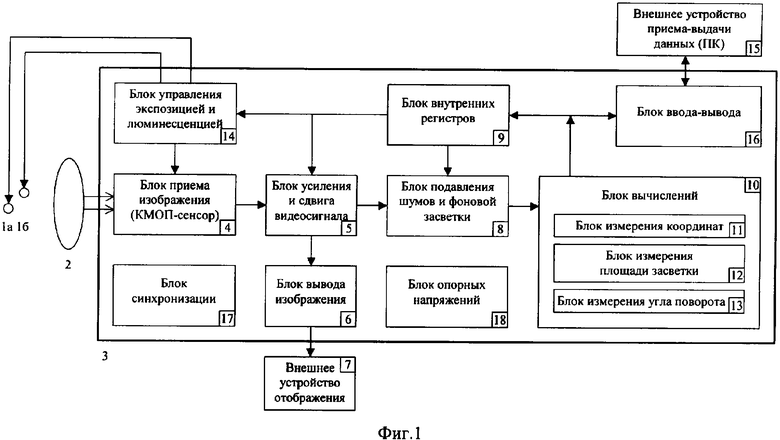
Оптический сенсор измерения координат, содержащий блок приема изображения на основе КМОП-сенсора, блок синхронизации, блок вычислений, включающий блок вычисления двумерных координат и блок вычисления площади засветки от одного или двух источников света, отличающийся тем, что он выполнен в интегральном исполнении и дополнительно включены блок управления экспозицией и длительностью времени люминесценции одного или двух источников света, увеличивающий амплитуду сигнала КМОП-сенсора по отношению к шуму, блок вычисления угла поворота одного источника света относительно другого, входящий в блок вычислений, блок усиления и сдвига видеосигнала, блок подавления шумов и фоновой засветки, блок внутренних регистров, блок вывода изображения, при этом сигнал с блока приема изображения поступает в блок усиления и сдвига видеосигнала, видеосигнал проходит через блок подавления шумов и фоновой засветки, где сравнивается с пороговыми значениями сигналов, заданных в блоке внутренних регистров, и поступает в блок вычислений, результаты вычислений сохраняются в блоке внутренних регистров, который задает режим работы блока управления экспозицией и длительностью времени люминесценции источников света, причем к блоку усиления и сдвига видеосигнала подключен блок вывода изображения, а блок синхронизации обеспечивает синхронное взаимодействие всех блоков оптического сенсора.
| JP 2001059706 А, 06.03.2001 | |||
| JP 8292998, 05.11.1996 | |||
| Оптическое приемно-передающее устройство | 1982 |
|
SU1112907A1 |
| US 2004101308 А, 27.05.2004 | |||
| Устройство для введения реагентов в расплав | 1980 |
|
SU933721A1 |

