Изобретение относится к оптическим методам контроля и слежения за смещением координат контрольных точек (КТ) удаленных объектов, например, отклонением от вертикали телевизионных опор радиотелевизионных передающих центров (РТПЦ), дымовых труб ТЭЦ, упругих колебаний мостовых опор и пролетов, а также антенных сооружений радиотехнических комплексов, как стационарного типа, так и мобильных (наземного и морского базирования). Предлагаемый способ субпиксельного контроля и слежения может быть эффективно использован для создания устройств контроля и позиционирования в различных отраслях народного хозяйства, где необходимо регистрировать и/или обеспечивать высокую точность поддержания координат заданных реперных точек высотных (или протяженных) объектов и сооружений гражданского и военного назначения.
Способы контроля и слежения за перемещением удаленных объектов можно рассматривать как задачи слежения за объектами, расположенными в разнесенных системах координат. Возникают такие задачи достаточно часто, когда имеется необходимость обеспечения высокой точности пространственной ориентации одного объекта относительно другого, либо контроля девиации координат КТ объекта, например, отклонения от вертикали телевизионных опор, дымовых труб, упругих колебаний мостовых опор и пролетов. Это может быть и обеспечение «слепой» посадки вертолета на нестандартную неподготовленную площадку или автоматическая стыковка сложных габаритных узлов (не обязательно в космосе); скажем, при установке на посадочное место буровых вышек с помощью вертолета.
Известны способы создания видеоизмерительных систем, предназначенных для решения прикладных задач инженерной геодезии, в которых на контролируемом объекте закрепляется визирная марка (контрольная точка), в точке наблюдения устанавливается видеодатчик, а искомые координаты вычисляются на основе компьютерной обработки стандартного выходного видеосигнала видеодатчика, содержащего изображение визирной марки [1], [2].
При этом в качестве видеодатчика используется телекамера на основе ПЗС-матрицы.
Наиболее близкими техническими решениями к патентуемому способу контроля и слежения за перемещением удаленного объекта по совокупности признаков (соответственно аналогом и прототипом) являются известные способы контроля и слежения, использованные в аппаратурно-программном комплексе оперативного контроля положений рабочих точек антенн угломерной радиотехнической системы [2], и реализованный способ измерения координат в «Видеоизмерителе координат контролируемой точки объекта» [3] - патент РФ №2308002 MПК: G01N 21/64.
В аналоге [2] в рабочей точке каждой антенны угломерной радиотехнической системы устанавливается визирная марка, содержащая визирные цели. Под антенной на геодезическом знаке закрепляется видеодатчик, в поле зрения которого находится визирная марка. Стандартный видеосигнал видеодатчика, содержащий изображения визирных целей визирной марки, передается в компьютер, обрабатывается в нем, и вычисляются искомые координаты рабочей точки каждой антенны угломерной радиотехнической системы в местной (геодезической) системе координат.
Основой для вычислений в таких видеоизмерительных системах служит зависимость положения изображения визирной марки в координатной системе видеодатчика (в видеосигнале видеодатчика) от положения визирной марки в местной координатной системе КТ, которое меняется под воздействием ветровой нагрузки, солнечной радиации и других факторов.
Прототипом настоящего изобретения является способ контроля и слежения за перемещением удаленного объекта, реализованный в патенте РФ №2308002 (МПК: G01N 21/64).
Анализ совокупности действий и операций контроля и слежения, реализованный в прототипе, свидетельствует следующее. Как правило, КТ находится на расстоянии до нескольких десятков метров от неподвижной (базовой) системы координат. Для учета флуктуации КТ в координатном пространстве базовой системы координат (БСК) используют специальные локальные устройства измерения девиации (УИД), следящие за смещением удаленной системы координат, центром которой и является КТ.
Главный недостаток как аналога, так и прототипа - это ограничение точности измерения смещения КТ в базовой системе координат размерами пикселя матрицы видеодатчика. Известные способы увеличения точности измерения смещения КТ, описанные в аналоге и прототипе, при неизменном расстоянии между местной системой координат визирной цели и координатной системы видеодатчика предусматривают необходимость использования, в качестве видеодатчиков дорогостоящих ПЗС-матриц высокого разрешения.
Использование таких матриц для контроля и слежения требует значительных аппаратных и временных ресурсов, поскольку мегапиксельные ПЗС-матрицы в работе используют большие потоки данных при съеме, передаче и обработке полученной с их помощью информации.
Существенным конструктивным и эксплуатационным недостатком прототипа является также низкая помехоустойчивость измерительной системы и отсутствие ограничения доступа постороннего излучения и эффективной защиты от боковых засветок канала регистрации, что значительно осложняет и затрудняет процедуру контроля в светлое время суток.
Настоящее изобретение решает задачу оперативного, с высокой точностью и надежностью, дистанционного измерения координат смещения КР с одновременным повышением помехоустойчивости измерительной системы и защиты от боковых засветок канала регистрации.
Патентуемый способ субпиксельного контроля и слежения за перемещением удаленного объекта позволяет решить проблему высокоточного отслеживания смещения КТ на удаленном (до 8 м) объекте (с точностью до 20 мкм), применяя ПЗС-матрицы со сравнительно низким разрешением (640×480 пкс).
Решение поставленной технической задачи осуществляют следующим образом.
В способе контроля и слежения за перемещением удаленного объекта, аналогичном способу, описанному в патенте РФ №2308002, включающем:
- передачу по оптическому каналу изображения контрольной светящейся точки подвижной системы и слежение за смещением этой точки в подвижной системе координат по перемещению ее изображения на ПЗС-матрице неподвижной системы координат,
- последующую передачу видеосигнала слежения по каналу связи в компьютер,
- обработку и вычисление смещения, т.е. разности текущих и первоначальных, записанных в памяти компьютера координат центра изображения контрольной светящейся точки в подвижной системе координат,
- и определение искомых координат контрольной точки антенны, используя преобразование координат.
Согласно патентуемому способу:
- оптический канал наблюдения реализуют в виде последовательно расположенных по оптической оси узла точечного источника, установленного на контрольной точке подвижной системы координат, длиннофокусного объектива и цифровой видеокамеры, которую подключают к персональному компьютеру,
- центр ПЗС-матрицы видеокамеры совмещают с началом координат неподвижной системы координат,
- при формировании видеосигнала наблюдения используют специальный конусообразный экран и точечный источник (ТИС) с излучением на длине волны, например, λ=695 нм,
- в оптический канал наблюдения для дополнительного устранения бликов и засветок в спектральном диапазоне длин волн короче 600 нм перед длиннофокусным объективом вводят отрезной соглассованный фильтр,
- а обработку информации о засветке ПЗС-матрицы от ТИС удаленного объекта в персональном компьютере осуществляют в два этапа - на первом этапе осуществляют поиск области изображения, в которой находится пятно засветки, и определяют координаты этой области, на втором - в найденной области определяют координаты центра тяжести пятна засветки и вычисляют его смещение от начала координат в неподвижной системе координат, после чего проводят перерасчет - преобразование этого смещения для контрольной точки на удаленной подвижной системе координат.
Согласно патентуемому изобретению предварительный поиск области изображения, в которой находится пятно засветки, производят путем последовательного сканирования всей информационной матрицы с помощью матрицы-маски, размеры которой m x n существенно меньше размеров информационной матрицы и соизмеримы с размерами пятна засветки, для которой закон распределения яркости, размер, форму задают заранее. При этом формируют разностную функцию, определяющую зону, которую используют для вычисления координат центра тяжести найденной области.
Патентуемый способ предусматривает, что для повышения точности определения координат центра тяжести пятна засветки используют градации яркости в каждом пикселе. Субпиксельная точность определения координат в плоскости неподвижной системы координат в этом случае ограничена выбранным числом градаций серого.
Реализация патентуемой совокупности существенных признаков разработанного способа контроля и слежения за перемещением удаленного объекта достигается путем создания автоматизированной телевизионной системы слежения за смещением удаленного объекта. Эта задача является разновидностью задачи позиционирования подвижной системы координат относительно неподвижной.
На Фиг.1 представлена схема проведения измерений смешения контрольной точки верхней (подвижной системы координат) относительно неподвижной. Контрольные точки обычно располагаются в началах параллельных горизонтально расположенных систем координат. В арретированом, обездвиженном состоянии контрольная точка верхней системы координат находится на перпендикуляре, восстановленном из контрольной точки нижнего состояния.
В соответствии с этой методикой в рабочей контрольной точке (КТ) располагают точечный источник (ТИС) - контрольный элемент подвижной системы координат (S в плоскости А-А, см. Фиг.1). ПЗС-матрицу размещают в плоскости, связанной с базовой системой координат (БСК), а центр матрицы центруют с началом координат БСК. При этом на Фиг.1:
h - расстояние до объекта;
f - фокусное расстояние объекта;
S0-S1 - перемещение рабочей точки ДИ на удаленной системе координат;
O-O1 - смещение изображения ТИС в плоскости БСК.
Патентуемый способ контроля и слежения основан на формировании посредством объектива L видеоизображения ТИС - пятна засветки в плоскости БСК. Смещение контрольной точки на подвижной системе координат приводит к смещению изображения ТИС на регистрирующей ПЗС- матрице. Смещение центра пятна засветки позволяет оценить величину смещения в системе координат БСК.
Технический результат настоящего изобретения заключается в кардинальном повышении точности позиционирования удаленного объекта, что открывает широкие возможности использования патентуемого способа в самых различных отраслях народного хозяйства. Предлагаемый способ субпиксельного контроля и слежения может быть эффективно использован для:
- создания устройств контроля и позиционирования, где необходимо регистрировать и/или обеспечивать высокую точность поддержания координат заданных реперных точек высотных (или протяженных) объектов и сооружений гражданского и военного назначения;
- контроля за отклонением от вертикали телевизионных опор радиотелевизионных передающих центров (РТПЦ), дымовых труб ТЭЦ, упругих колебаний мостовых опор и пролетов, а также антенных сооружений радиотехнических комплексов, как стационарного типа, так и мобильных (наземного и морского базирования).
Патентуемый способ позволяет определить смещения контрольной точки с точностью - 20 мкм при использовании для регистрации ПЗС-матрицы с небольшим разрешением 640×480 пикселов. При этом точность позиционирования изображения контрольной точки на БСК (пятна засветки) достигает субпиксельной величины - 0,2 пикс. Для выбранной в устройстве видеоизмерений цифровой матрицы с размером пикселя 7,5 мкм координаты центра тяжести изображения удаленного до 8 м светящегося объекта можно вычислить с точностью до 1,5 мкм в плоскости приемника.
Технический результат настоящего изобретения заключается также в том, что патентуемый способ позволяет:
- проводить контроль в любое время суток, поскольку оптический канал наблюдения размещен в специальном конусообразном экране для ограничения доступа постороннего излучения;
- значительно повысить помехоустойчивость системы и обеспечить защиту от боковых засветок, а также исключить возможность дополнительных засветок от основной части спектра видимого диапазона, для чего в оптический канал введен отрезной красный фильтр и в качестве ТИС используют соответствующий фильтру светодиод.
Следует отметить, что для повышения помехоустойчивости системы и защиты от боковых засветок разработан и введен алгоритм предварительной обработки снимаемой с цифровой матрицы информации для поиска пятна засветки с заданными параметрами на изображении и определения центра тяжести пятна засветки (в общем случае произвольной формы).
Кроме того, для повышения точности измерения координат КТ разработан алгоритм субпиксельной обработки выделенного предварительно изображения пятна засветки.
Сущность изобретения поясняется примером реализации способа субпиксельного контроля и слежения за перемещением удаленного объекта и графическими материалами, на которых представлены:
Фиг.1 - принцип измерения смешения;
Фиг.2 - Функциональные узлы блок-схемы устройства видеоизмерений;
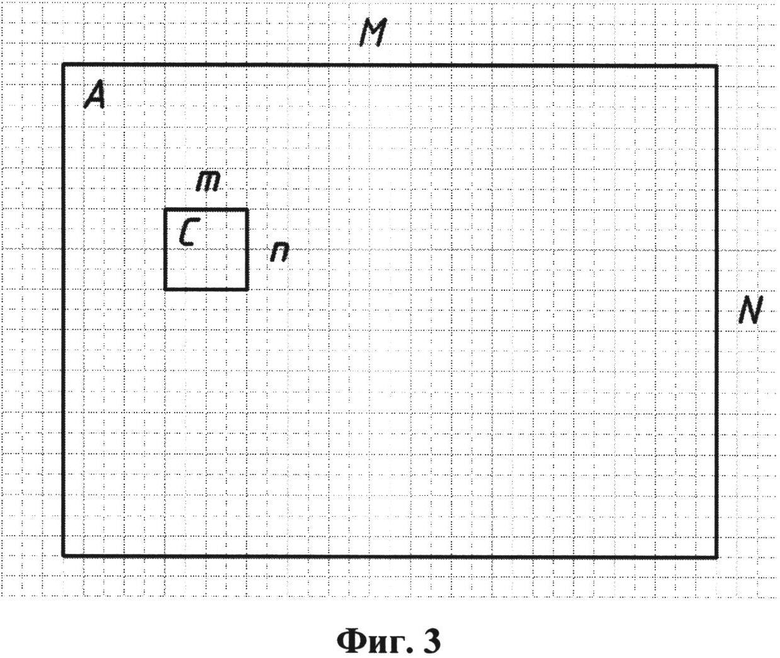
Фиг.3 - графическое представление области обзора А;
Фиг.4 - изображение распределения яркости матрицы-маски;
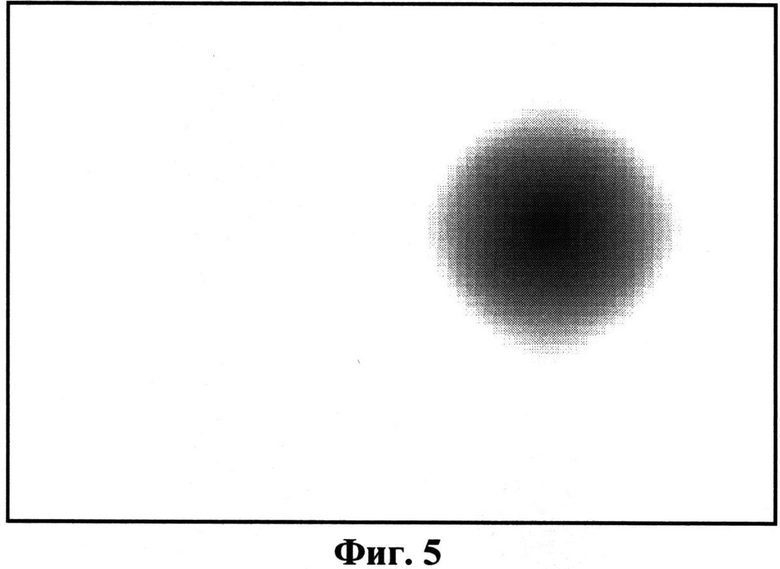
Фиг.5 - вид распределения разностной функции D;
Фиг.6 - к методу субпиксельного измерения;
Фиг.7 - к определению координат центра тяжести пятна;
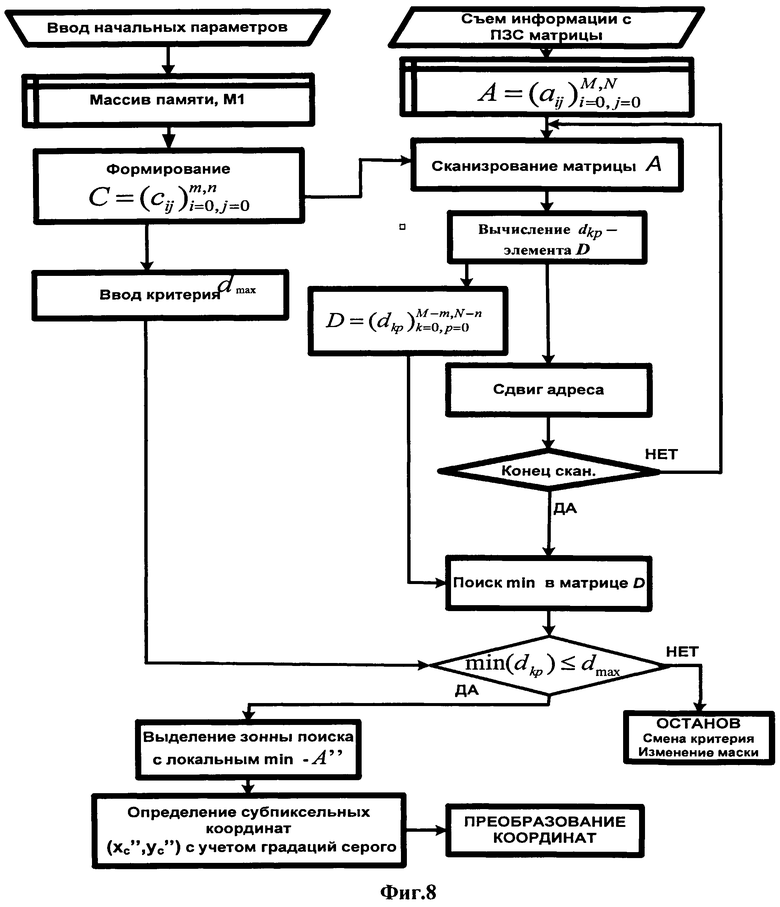
Фиг.8 - алгоритм программы субпиксельного контроля.
Реализацию патентуемого способа субпиксельного контроля и слежения осуществляют с помощью разработанного эффективного устройства видеоизмерений, которое включает (фиг.2): узел точечного источника (ТИС) 1, отрезной согласованный фильтр 2, длиннофокусный объектив 3, цифровую кинокамеру (ЦК) 4, персональный компьютер (ПК) 5, блок питания (БП) 6, конусообразный экран 7.
Патентуемый способ предусматривает, что ТИС 1 установлен на контрольной точке (КТ) подвижной системы координат (S в плоскости А-А, см. фиг.1). В качестве точечного источника 1 возможно использовать, например, светодиод VD13Л341Б. В плоскости, связанной с базовой системой координат БСК, размещают цифровую матрицу (АСМ-5001, разрешение 840×480), центр ПЗС-матрицы которой центруется с началом координат БСК.
Плоскость контрольного элемента подвижной системы координат (А-А1) и плоскость БСК разнесены на 7-8 м. ПЗС-матрица располагается в фокальной плоскости длиннофокусного объектива 3 (например, TAMRON 13VM20100AS), с помощью которого собирается излучение ТИС 1. Для исключения дополнительных засветок в оптический канал введен отрезной согласованный красный фильтр 2 (ЖС-13), отрезающий из спектра излучение по длине волны короче 600 нм.
С цифровой матрицы видеоинформация поступает на ПК 5 на обработку.
Устройство видеонаблюдений дополнено стандартным блоком питания 6 (12 В и 5 В).
Входные данные поступают на ПК 5 в виде файла изображения, кодированного по известному стандарту сжатия (jpg, bmp) или передаваемого в несжатом виде (RAW). Параметры изображения:
- монохромное;
- число градаций яркости 256;
- размер M×N пикселей.
Алгоритм обработки.
Изображение представляется числовой матрицей А, отражающей распределение яркости принятого изображения.

где А- числовая матрица, M·N - число элементов матрицы А, aij - элемент матрицы может принимать значения от 0 до 255, i, j - индексы номера строки и столбца соответственно в матрице А.
На первом этапе нахождения координат центра тяжести выполняется поиск области изображения (Фиг.3 - графическое представление области обзора А), в которой находится пятно засветки и производится проверка соответствия параметров этого пятна предварительно введенному. Для сравнения параметров пятна с заданными параметрами в алгоритме используется матрица - маска С. Параметры эталонного пятна - маски С (закон распределения яркости, размер, форма) задаются заранее.

где С - матрица-маска, Сij - элементы матрицы-маски, m x n - число элементов матрицы-маски С, размеры которой существенно меньше размеров матрицы А и соизмеримы с размерами пятна, i, j - индексы номера строки и столбца соответственно в матрице А.
Матрица С фактически отражает распределение яркости эталонного объекта (Фиг.4 - изображение распределения яркости матрицы-маски).
Накладывая матрицу-маску на области исходной матрицы, проводя поэлементное вычитание и последовательно перемещая ее по элементам матрицы А, мы получаем разностную двумерную функцию D:

где D - разностная двумерная функция, dkp - элементы двумерной функции D,(k,p) - текущие координаты левого угла матрицы - маски С, (М-m, N-n) - диапазон перемещения матрицы-маски по абсциссе и ординате матрицы A.
Разностная функция D формируется следующим образом.
Матрица С (размерами m на n элементов) накладывается на область матрицы А, верхний левый угол которой имеет координаты (k,р). Обозначим выделенную область - Вk,р:


где: 

По алгоритму матрица-маска С последовательно со сдвигом на один пиксел накладывается на изображение (матрицу A) (начиная с k=0, р=0) и вычитается из текущей матрицы Bk,p. Сумма абсолютных значений элементов полученной разностной матрицы определяет значение элемента двумерной функции D:
где dkp - элемент двумерной функции D.
Таким образом, просканировав всю область матрицы А, мы получаем двумерное распределение функции D. Примерный вид распределения разностной функции представлен на Фиг.5 - вид распределения разностной функции D.
Если функция D имеет один локализованный минимум или имеет несколько минимальных элементов, расположенных по соседству, значение минимума соответствует условию

где dmax - коэффициент соответствия задается программно заранее и не меняется в процессе измерения.
При выполнении условия (1.6) можно утверждать, что на изображении присутствует объект, параметры которого близки к параметрам заданного эталона.
В системе матрицы А выполнение этого условия задает зону А", которая используется для точного вычисления координат центра тяжести пятна (см. Фиг.8). Координаты первого минимального элемента обозначаются в системе матрицы А как (x",у").

где A'' - выделенная зона, удовлетворяющая условию (1.6), 
На втором этапе точное вычисление координат осуществляют методом субпиксельного измерения внутри зоны А". Координаты центра тяжести пятна в системе матрицы А" обозначаются как (xс",ус") и вычисляются по нижеприведенным формулам:

где (хс",ус") - координаты центра тяжести пятна в системе матрицы А",
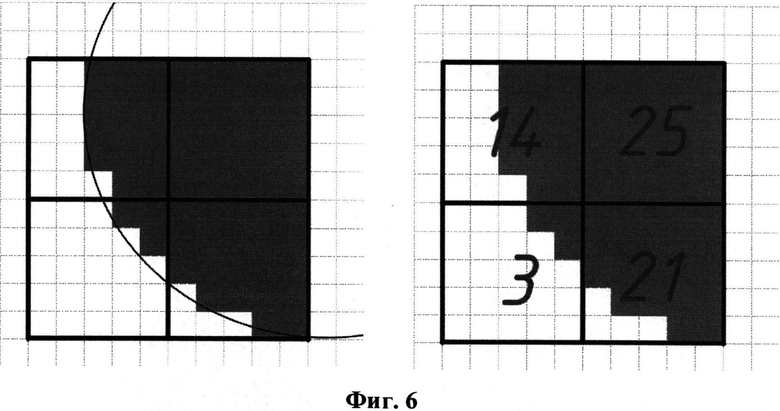
Принцип субпиксельного измерения основан на возможности использования градации яркости для каждого пиксела,
Точность патентуемого способа контроля и слежения ограничивается выбранным числом градаций серого. Применение в оптическом измерительном канале отрезного фильтра 2, согласованного с длиной волны излучения контрольного элемента подвижного объекта, и программная установка нижнего порога чувствительности обеспечивают уровень полезного сигнала, значительно превышающий уровень шума.
Принцип субпиксельного измерения поясняет Фиг.6 - к методу субпиксельного измерения.
В случае 256 градаций серого стандартной 8-битной матрицы и порогового значения 55 для оставшихся 200 градаций можно задать шаг 8 - в этом случае программно мы имеем дело с 25 градациями серого, и по одной координате мы фактически получим точность до 0,2 пикс. Для стандартной матрицы с размером пикселя 7,5 мкм при таких параметрах координаты центра тяжести можно вычислить с точностью до 1,5 мкм в плоскости приемника.
Несмотря на потенциально высокую точность этого метода, применение его ко всему изображению невозможно без предварительной обработки в соответствии с представленным алгоритмом. В данном алгоритме метод субпиксельного измерения применяется лишь к небольшой выделенной области А", энергия шума в которой мала по сравнению с энергией полезного сигнала.
Пересчет координат центра тяжести пятна в систему координат матрицы А осуществляется по формулам:

где хс, ус - координаты центра тяжести пятна засветки с учетом субпиксельной градации яркости в каждом пикселе; (х",у") - координаты первого минимального элемента (удовлетворяющего условию (1.6)); (хс",ус") - координаты центра тяжести пятна в системе выделенной матрицы А".
Пояснение к вышесказанному дается на Фиг.7 - к определению координат центра тяжести пятна. На Фиг.8 приведен алгоритм программы субпиксельного контроля.
Патентуемый способ субпиксельного контроля и слежения за перемещением удаленного объекта, прошел успешные испытания, которые подтвердили на практике, что настоящий способ позволяет в реальном времени на расстоянии до 8 м измерять смещение светящегося объекта с точностью до 20 мкм.
Результаты испытаний позволяют констатировать кардинальное повышение точности позиционирования удаленного объекта. Испытания подтвердили, что патентуемое изобретение позволяет определить смещение контрольной точки на удаленном объекте с точностью - 20 мкм при использовании для регистрации ПЗС-матрицы с небольшим разрешением 640×480 пикселов.
При этом благодаря разработанному алгоритму точность позиционирования изображения контрольной точки на БСК (пятна засветки) достигает субпиксельной величины - 0,2 пикс. Для выбранной в устройстве видеоизмерений цифровой матрицы с размером пикселя 7,5 мкм при таких параметрах координаты центра тяжести можно вычислить с точностью до 1,5 мкм в плоскости приемника.
Список использованной технической информации
1. Буюкян С.П. «Видеоизмерение в инженерной геодезии», «Известия высших учебных заведений», серия «Геодезия и аэрофотосъемка», №6, 2002 г., с.27.
2. Буюкян С.П., Безматерных М.В., Бодунков П.В. «Аппаратурно-программный комплекс оперативного контроля положений рабочих точек антенн угломерной радиотехнической системы», Международная научно-техническая конференция, посвященная 225-летию МИИГАиК, Сборник трудов. - М., 2004 г., с.237).
3. Патент RU №2 308 002 (заявка 2006109637/28 от 27.03.2006 г.) - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения угловой ориентации объекта | 2017 |
|
RU2667343C1 |
| ВИДЕОИЗМЕРИТЕЛЬ ПЛАНОВЫХ КООРДИНАТ КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2005 |
|
RU2303765C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 1987 |
|
RU2013029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| УСТРОЙСТВО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2017 |
|
RU2662256C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| Способ определения с субпиксельной точностью пиксельных координат центра лазерного пятна маломощного лазера | 2024 |
|
RU2834963C1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМБИНИРОВАННОГО ЧЕРНО-БЕЛОГО И ПОЛНОЦВЕТНОГО ПЕРСОНАЛИЗАЦИОННОГО ИЗОБРАЖЕНИЯ НА МНОГОСЛОЙНОЙ СТРУКТУРЕ | 2014 |
|
RU2556328C1 |



Изобретение относится к оптическим методам контроля и слежения за смещением координат контрольных точек удаленных объектов. Согласно способу оптический канал наблюдения реализуют в виде последовательно расположенных по оптической оси узла точечного источника, установленного на контрольной точке подвижной системы координат, длиннофокусного объектива и цифровой видеокамеры, которую подключают к персональному компьютеру. Центр ПЗС-матрицы видеокамеры совмещают с началом координат неподвижной системы координат. При формировании видеосигнала наблюдения используют экран и точечный источник с излучением на длине волны в красном спектральном диапазоне. Обработку информации о засветке ПЗС-матрицы от точечного источника осуществляют в персональном компьютере в два этапа. На первом этапе осуществляют поиск области изображения, в которой находится пятно засветки, и определяют координаты этой области. На втором этапе в найденной области определяют координаты центра тяжести пятна засветки и вычисляют его смещение от начала координат в неподвижной системе координат. В результате проводят перерасчет - преобразование этого смещения для контрольной точки на удаленной подвижной системе координат. Технический результат - повышение точности позиционирования удаленного объекта. 2 з.п. ф-лы, 8 ил.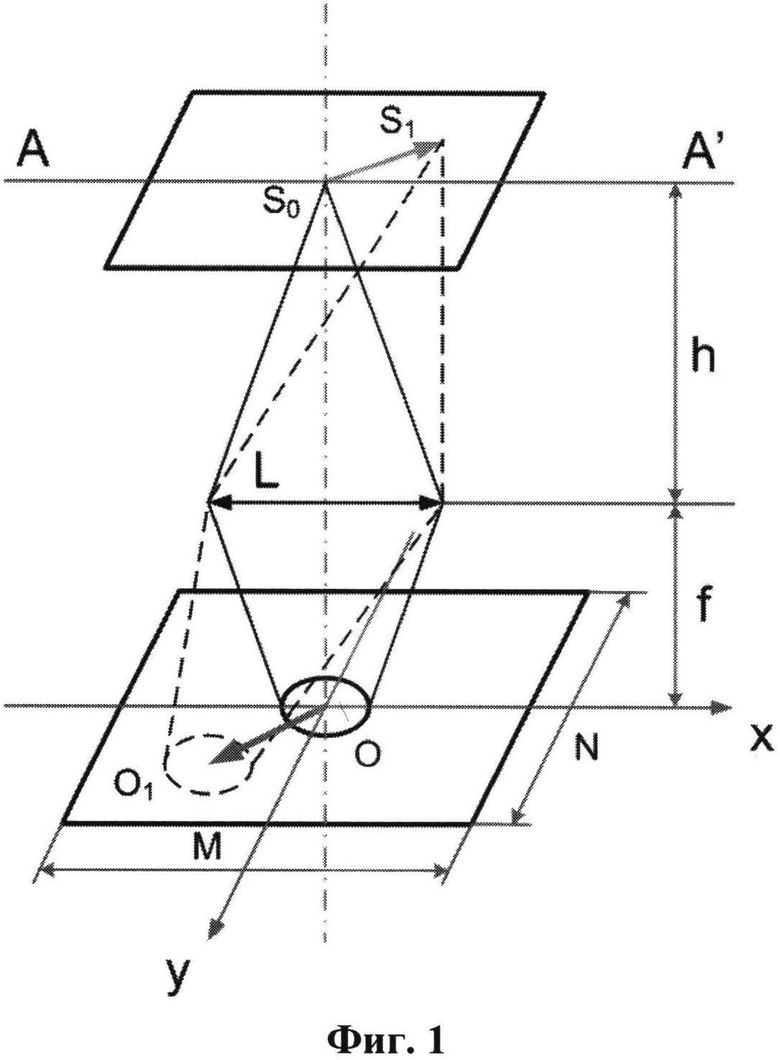
1. Способ субпиксельного контроля и слежения за перемещением удаленного объекта, включающий передачу по оптическому каналу изображения контрольной светящейся точки подвижной системы и слежение за смещением этой точки в подвижной системе координат по перемещению ее изображения на ПЗС-матрице неподвижной системы координат, последующую передачу видеосигнала слежения по каналу связи в компьютер, обработку и вычисление смещения разности текущих и первоначальных, записанных в памяти компьютера координат центра изображения контрольной светящейся точки в подвижной системе координат, определение искомых координат контрольной точки объекта путем использования преобразования координат, отличающийся тем, что оптический канал наблюдения реализуют в виде последовательно расположенных по оптической оси узла точечного источника, установленного на контрольной точке подвижной системы координат, длиннофокусного объектива и цифровой видеокамеры, которую подключают к персональному компьютеру, центр ПЗС-матрицы видеокамеры совмещают с началом координат неподвижной системы координат, при этом при формировании видеосигнала наблюдения используют специальный конусообразный экран и точечный источник (ТИС) с излучением на длине волны в красном спектральном диапазоне, а в оптический канал наблюдения для дополнительного устранения бликов и засветок в спектральном диапазоне длин волн короче длины волны ТИС перед длиннофокусным объективом вводят отрезной согласованный фильтр, обработку информации о засветке ПЗС-матрицы от ТИС удаленного объекта в персональном компьютере осуществляют в два этапа - на первом этапе осуществляют поиск области изображения, в которой находится пятно засветки, и определяют координаты этой области, на втором - в найденной области определяют координаты центра тяжести пятна засветки и вычисляют его смещение от начала координат в неподвижной системе координат, после чего проводят перерасчет - преобразование этого смещения для контрольной точки на удаленной подвижной системе координат.
2. Способ по п.1, отличающийся тем, что предварительный поиск области изображения, в которой находится пятно засветки, производят путем последовательного сканирования всей информационной матрицы с помощью матрицы-маски, размеры которой m×n существенно меньше размеров информационной матрицы и соизмеримы с размерами пятна засветки, для которой закон распределения яркости, размер, форму задают заранее; при этом формируют разностную функцию, определяющую зону, которую используют для вычисления координат центра тяжести найденной области.
3. Способ по п.1, отличающийся тем, что для повышения точности определения координат центра тяжести пятна засветки используют градации яркости в каждом пикселе, субпиксельная точность определения координат в плоскости неподвижной системы координат в этом случае ограничена выбранным числом градаций серого.
| ВИДЕОИЗМЕРИТЕЛЬ КООРДИНАТ КОНТРОЛИРУЕМОЙ ТОЧКИ ОБЪЕКТА | 2006 |
|
RU2308002C1 |
| US 2002033818 A1, 21.03.2002 | |||
| US 2011000478 A1, 06.01.2011 | |||
| СПОСОБ СНИЖЕНИЯ ВЛИЯНИЯ САМОПОДОБНОСТИ В СЕТЕВЫХ СТРУКТУРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413284C2 |

