диафрагма и фотодетектор, соединенный с блоком регистрации, связанным с блоком обработки сигнала. С помощью указанного объектива и полевой диафрагмы формируется поле зрения приемной системы.
Однако в указанном приемопередающем устройстве недостаточная степень под.авления фоновых помех на входе детектора и, как следствие этого, недостаточная дальность зондирования.
Цель изобретения -увеличение дальности зондирования в условиях фоновых помех путем их минимизации на входе фотодетектора.
Поставленная цель достигается тем, что в устройстве, содержащем передатчик излучения и приемник, включающий обьектив, полевую диафрагму и фотодетектор, соединенный с блоком регистрации, связанным с блоком обработки сигнала, обьектив выполнен в виде анаморфотной оптической системы из длиннофокусного и короткофокусного элементов, при этом оптическая ось передатчика излучения совмещена с плоскостью симметрии объектива параллельной образующей цилиндрической поверхности длиннофокусного элемента, а фокусные расстояния элементов объектива связаны соотношением
2 U Уь fi 20S-yLo)
где fi и f2 - фокусные расстояния соответственных длиннофокусного и короткофокусного элементов объектива;
LO-теневая зона локатора, то есть, расстояние от локатора до точки, где луч передатчика полностью входит поле зрения приемника;
(ро - расходимость луча передатчика; /5- расстояние между осями передатчика и приемника излучения;
у - угол между оптическими осями передатчика и приемника излучения.
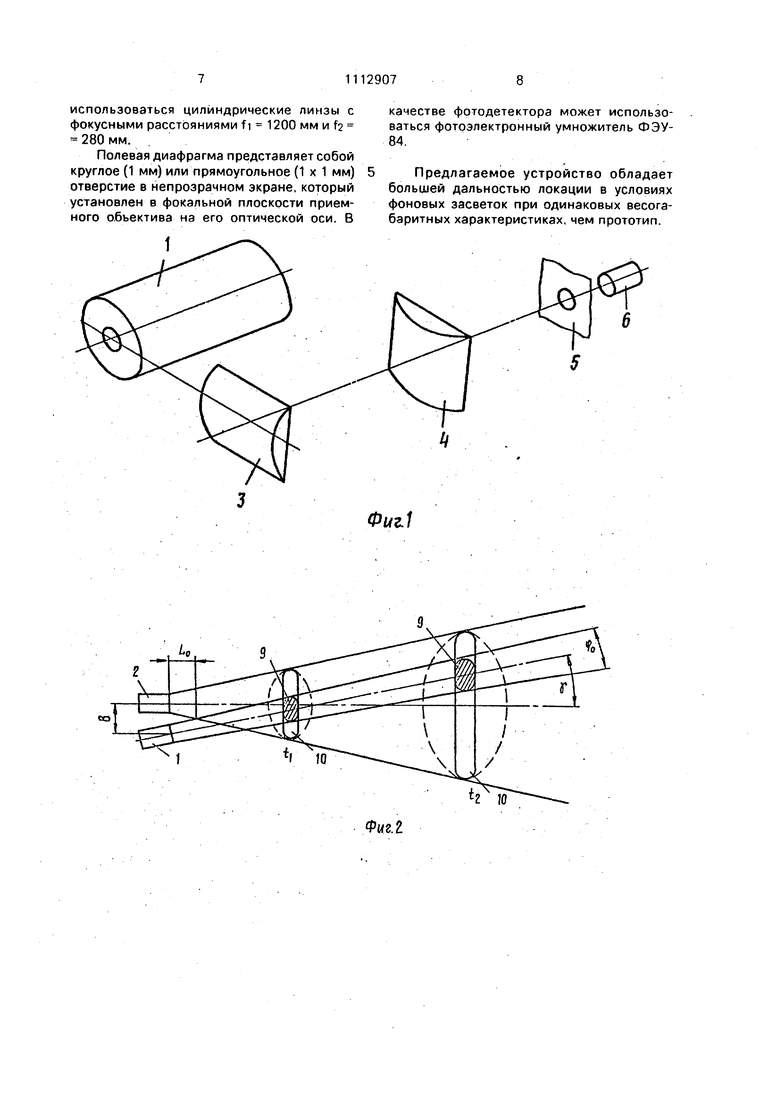
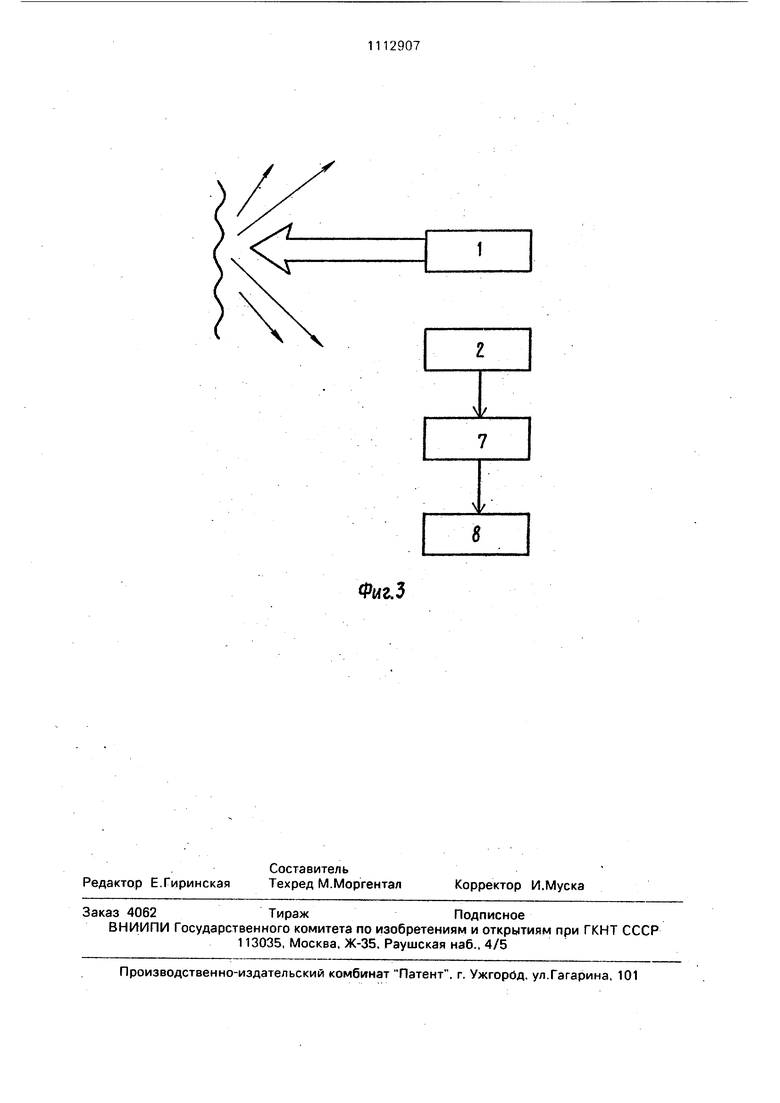
На фиг.1 приведена схема расположения элементов предлагаемого приемопередающего устройства; на фиг.2 - схема, иллюстрирующая принцип работы предлагаемого устройства; на фиг.З - блок схемы устройства.
Приемопередающее устройство содержит передатчик 1 излучений, приемник 2 излучения, состоящий из длиннофокусного формирующего элемента обьектива - анаморфота 3, короткофокусного формирующего элемента объектива-анаморфота 4, полевой диафрагмы 5, фотодетектора 6. соединенного с блоком регистрации 7, связанным с блоком 8 обработки сигнала. Одна из плоскостей симметрии приемника при
пересечении с цилиндрической поверхнотью длиннофокусного формирующего элемента объектива-анаморфота образует прямую линию. Приемник 2 и передатчик 1
расположены в непосредственной близости один от другого, причем оптическая ось передатчика расположена в плоскости симметрии приемника, которая параллельна цилиндрической поверхности длиннофокуснего формирующего элемента объективаанаморфота 3.
Устройство работает следующим образом (см, фиг.2),
С помощью передатчика 1 формируются световые импульсы, которые распространяются вдоль оптической оси передатчика и рассеиваются от лоцируемых объектов, расположенных на пути распространения этих импульсов. Рассеянное назад излучение поступает на объектив приемника 2. В приемной системе формируются различные по величине углы поля зрения в двух взаимноперпендикулярных направлениях, совпадающих с плоскостями симметрии указанного
объектива. В плоскости, проходящей через оптические оси приемника и передатчика, формируется наиболъшее значение угла поля зрения, а в ортогональной плоскости величина поля зрения, совпадающая с углом расходимости лоцирующего пучка (позицией 9 обозначено поперечное сечение передаваемого пучка).
Угол раскрытия приемника в плоскости, проходящей через оптические оси приемника и передатчика представлен соотношением. (i8-yU)
f2U
а в плоскости ей ортогональной
d „
ffНа фиг.2 изображено взаимное расположение приемника и передатчика и сечение поля зрения приемной системы 10 для
двух моментов времени ti и t2. Пунктиром показано сечение поля зрения приемной системы известного устройства. На фиг.2 видно, что площадь поперечного сечения поля зрения предлагаемого устройства меньше,
чем у известного. Следовательно и величина телесного угла приемной системы у предлагаемого устройства на фиксированной дальности меньше, чем у известного. Так как величина фоновых помех, поступающих на
вход фотодетектора, пропорциональна величине телесного угла приемника, то на вход фотодетектора в предлагаемом устройстве поступает меньше фоновых помех, чем у известного. Дальность локации обратно пропорциональна величине фоновых засветок, поступающих на вход фотодетектора, поэтому предлагаемое устройство позволяет в условиях фоновых засветок (например днем)увеличить дальность локации посравнению с известным. Работа устройства в целом показана на фиг.З. Формируемый передатчиком 1 мощный импульс, рассеивается в атмосфере и частично попадает на приемное устройство 2. Далее сигнал направляется в блок регистрации 7 и затем в блок 8 обработки. Регистратор представляет собой аналого-цифровой преобразователь, работающий в реальном масштабе времени и удовлетворяющий параметрам сигнала по временному разрешению и динамике (например Ф-707,7). В качестве блока обработки может быть использован вычислительный комплекс на базе любой серийно выпускаемой- ЦВМ (например Электроника-60) и программно реализующий алгоритм обработки данных в зависимости от типа решаемой задачи (например вычисление прозрачности атмосферы, расчет метеорологической дальности видимости и т.д.). Мощность засветки на входе фотодетектора определяется выражением P(t)Pc(t)+ N,(2) .где Po(t)- мощность обратно рассеянного излучения - сигнала: N - мощность фоновой засветки. В свою очередь, уровень фоновой засветки определяется как N Q А ЛЯ К, В,(3) где Q- телесный угол поля зрения приемника;А - площадь входной апертуры приемного телескопа: АЯ-спектральный интервал; Kjt - коэффициент пропускания приемного телескопа для длины волны Я; .Bji - спектральная яркость участка небосвода в зондируемом направлении. Дальность локации определяется из уравнения лазерной локации K-jgii -т где К - аппаратурная константа; В|| - коэффициент обратного рассеяния;Т-коэффициент пропускания атмосферы;К - дальность зондирования. Из соотношения (3) и (4) находят максимальную дальность зондирования (4) К-/,|-Т V Из выражения (5) следует, что с уменьшением фоновой засветки дальность зондирования возрастает. В свою очередь, мощность фоновой засветки приемной системы пропорциональна величине поля зрения приемной системы, см. выражение(3). В предлагаемом устройстве в результате применения анаморфотной оптической системы, ориентированной определенным образом по отношению к передатчику излучения, поле зрения приемной системы представляет собой телесный угол, оптимизированный по отношению к размерам лоцируемого пучка. Сравнивая между собой телесные углы поля зрения приемных систем известного и предлагаемого устройства (см. фиг.2), можно определить во сколько раз величины фоновых засветок, поступающих на вход фотодетектора отличаются одна от другой Il Sl IX „--JTLIn Т2 S2 где TI и Т2 - соответственно телесный угол поля зрения известного и предлагаемого устройств; Si и $2 - площадь сечения поля зрения известного и предлагаемого устройств соответственно на одинаковом удалении от локатора. Для известного устройства при равенстве угла зрения приемной системы двум значениям угловых размеров лоцируемого пучка величина Si, определяется Si 4 лт я 12 г где г- радиус сечения лоцируемого пучка. Площадь сечения поля зрения предлагаемого устройства может быть оценена по расчетам описанного прямоугольника вокруг фигуры сечения, при этом эта оценка несколько завышена S2 8r Таким образом, величина К для этих усовий составляет 1,5, т.е. во столько раз в предлагаемом устройстве величина фоновых засветок на входе фотодетектора меньше. Примером реализации данного устройтва является оптический локатор, состоящий из приемника и передатчика излучения. В состав передатчика входит источник злучения и передающая антенна. В качесте источника излучения может быть испольован оптический квантовый генератор АРЗНИ-207, а в качестве передающей аненны - зеркально-линзовый объектив типа ТО-1.000. Приемник излучения состоит из бьектива, полевой диафрагмы и фотодетекора. В качестве обьектива приемника могут
использоваться цилиндрические линзы с фокусными расстояниями fi 1200 мм и f2 280 мм. .
Полевая диафрагма представляет собой круглое (1 мм) или прямоугольное (1 х 1 мм) отверстие в непрозрачном экране, который установлен в фокальной плоскости приемного объектива на его оптической оси. В
качестве фотодетектора может использоваться фотоэлектронный умножитель ФЭУ84.
Предлагаемое устройство обладает большей дальностью локации в условиях фоновых засветок при одинаковых весогабаритных характеристиках, чем прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Светолокационный дальномер | 1977 |
|
SU687905A1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| СПОСОБ ЛАЗЕРНОГО ГЕТЕРОДИННОГО ПРИЕМА ИЗЛУЧЕНИЙ | 2007 |
|
RU2349930C1 |
| Двухволновой лидар для зондирования атмосферы | 1978 |
|
SU720961A1 |
| СПОСОБ ОБНАРУЖЕНИЯ СРЕДСТВ ОПТИЧЕСКОГО И ОПТОЭЛЕКТРОННОГО ТИПА | 1998 |
|
RU2133485C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| Оптическое устройство | 1976 |
|
SU655192A1 |
| Оптическая система для зондирования атмосферы | 1977 |
|
SU673015A1 |
| Устройство для оптического зондирования | 1978 |
|
SU1065743A1 |
| Устройство для оптического зондирования атмосферы | 1976 |
|
SU596069A1 |
Фмг.2
Фиг.3
| Заявка ФРГ № 1853594, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Проблемы дистанционного зондирования атмосферы | |||
| Сборник статей | |||
| СО АН СССР | |||
| Институт оптики атмосферы | |||
| Томск, 1976 | |||
| с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
