Изобретение относится к комплектующим пневмоприводов мембранного или поворотного типа систем автоматического регулирования или дистанционного управления технологическими процессами в химической промышленности, нефтехимических, нефтегазоперерабатывающих, нефтегазодобывающих и других производствах.
Основная функция позиционера - обеспечение соответствия между положением рабочего органа регулирующей арматуры и величиной входного сигнала независимо от трения, гистерезиса и несбалансированных усилителей в пневмоприводе и арматуре.
Известен позиционер и метод его использования, включающий регулятор положения штока клапана, первый вход которого определяет заданное положение штока клапана, второй вход - текущее положение штока клапана, а выход связан с управляемым приводом, устройство обнаружения погрешности, связанное со вторым входом регулятора, - устройство сравнения (патент US 6512960).
Известен также регулятор положения, связанный пневматической линией с пневматическим приводом. Привод включает пусковой элемент предохранительного клапана и имеет электрическую шину питания для управления электропневмопреобразователем посредством коммутатора. Коммутатор регулируется схемой управления, связанной с шиной питания и установлен в регуляторе положения (US 20060266966).
Наиболее близким к предлагаемому изобретению является позиционер клапана, регулирующий положение клапана в системе управления технологическим процессом. Позиционер клапана получает сигнал заданного положения штока клапана. Позиционер клапана управляет пневматическим приводом, который в свою очередь управляет положением клапана. Позиционер клапана включает микропроцессор, включающий цифровую электрическую схему и аналоговую электрическую схему. Микропроцессор периодически корректирует, по крайней мере, один сигнал цифрового управления, использованный для того, чтобы выборочно программировать сопротивление в аналоговой электрической схеме. Комбинация цифровой и аналоговой электрической схемы позволяет снизить потребление электроэнергии, потому что аналоговая электрическая схема потребляет меньше мощности и обладает большим быстродействием (US 5431182).
Недостатком прототипа является возможность возникновения колебательного переходного процесса и недостаточное быстродействие устройства.
Задачей, на решение которой направлено настоящее изобретение, является улучшение качества управления положением клапана за счет устранения отмеченных недостатков.
Поставленная задача решается тем, что позиционер приводного механизма, содержащий блок питания, блок сигнализации, выходы которого предназначены для подключения внешних элементов сигнализации, первым входом связанный с входом заданного положения штока клапана регулятора положения штока, а вторым входом - с его входом текущего положения штока клапана и через преобразователь угла поворота связан с преобразователем линейного перемещения в угловое, вход которого и выход мембранного привода клапана предназначены для взаимодействия со штоком клапана, а вход мембранного привода клапана связан с выходом электропневмопреобразователя, первый вход которого предназначен для подключения к пневматической линии, при этом первый выход блока питания связан с входами питания блока сигнализации, регулятора положения штока клапана, преобразователя угла поворота и электропневмопреобразователя, а второй выход блока питания связан со вторым входом питания электропневмопреобразователя, дополнительно содержит блок расчета тока, вход которого связан со входом заданного положения штока клапана регулятора положения штока, а выход - с первым входом сумматора, выходом связанного со вторым входом электропневмопреобразователя, второй вход сумматора подключен к выходу регулятора давления, первый вход которого связан с выходом регулятора положения штока, а второй его вход связан с выходом пневмоэлектропреобразователя, вход которого связан с выходом электропневмопреобразователя, при этом выход блока расчета заданного положения штока связан с входом заданного положения штока клапана регулятора положения штока и входом блока расчета тока, а его вход предназначен для подачи входного тока, при этом первый выход блока питания связан с входами питания блока расчета заданного положения штока, регулятора давления, пневмоэлектропреобразователя, сумматора и блока расчета тока.
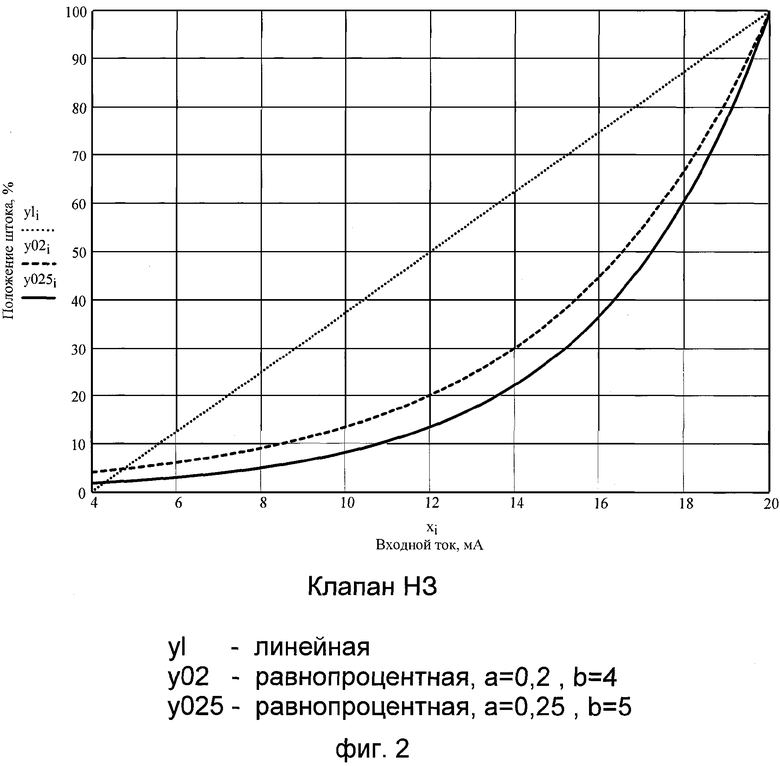
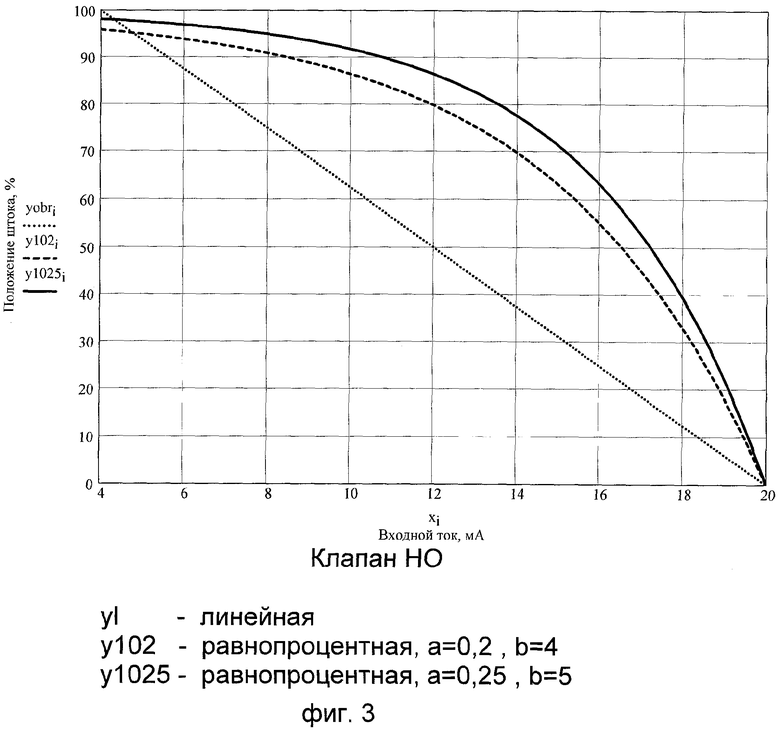
Изобретение поясняется чертежами, где на фиг.1 представлена блок-схема позиционера, на фиг.2 - зависимость положения штока клапана в процентах от величины входного тока для нормально закрытого клапана (НЗ), на фиг.3 - зависимость положения штока клапана в процентах от величины входного тока для нормально открытого клапана (НО).
Позиционер содержит:
- 1 - блок питания,
- 2 - блок сигнализации,
- 3 - регулятор положения штока,
- 4 - преобразователь угла поворота,
- 5 - преобразователь линейного перемещения в угловое,
- 6 - мембранный привод клапана,
- 7 - электропневмопреобразователь,
- 8 - блок расчета тока,
- 9 - сумматор,
- 10 - регулятор давления,
- 11 - пневмоэлектропреобразователь,
- 12 - блок расчета заданного положения штока.
Для описания работы позиционера на фиг.1 указаны шток клапана 13 и регулирующий клапан 14.
Заявляемый позиционер приводного механизма работает следующим образом. Входные цепи позиционера подключаются по «токовой петле» диапазона 4-20 мА к внешнему регулятору технологического процесса. За счет падения напряжения на последовательно включенных входных резисторах осуществляется как измерение входного тока в блоке 12, так и формирование в блоке 1 напряжений питания уровнем в 3 и 50 В.
Напряжение 3В подается на входы питания блока сигнализации 2, регулятора положения штока клапана 3, преобразователя угла поворота и электропневмопреобразователя 7. Напряжение 50В дополнительно подается на второй вход питания электропневмопреобразователя 7. Энергии «токовой петли» достаточно для питания всех элементов позиционера при уровне тока не менее 3,8 мА.
По величине входного тока в блоке 12 рассчитывается заданное (желаемое) положение штока 13, регулирующего клапана 14 в процентах от диапазона перемещения.
В зависимости от вида клапана (НО - нормально открытый, Н3-нормально закрытый) и типа его пропускной характеристики (линейная, равнопроцентная) расчет заданного положения штока осуществляется по следующим формулам:
1) для клапана НЗ с линейной характеристикой (фиг.2):

где Iвх - входной ток, мА,
Imin - минимальный входной ток, мА (4 мА),
Imax - максимальный входной ток, мА (20 мА),
2) для клапана НЗ с равнопроцентной характеристикой (фиг.2):

где a, b - коэффициенты, подбираемые исходя из реальной пропускной характеристики клапана,
3) для клапана НО с линейной характеристикой (фиг.3):

где Iвх - входной ток, мА,
Imin - минимальный входной ток, мА (4 мА),
Imax - максимальный входной ток, мА (20 мА),
4) для клапана НО с равнопроцентной характеристикой (фиг.3):

Заданное положение штока Хзад затем преобразуется в сигнал электрического напряжения Ux w, который поступает на вход блока расчета тока 8, на вход заданного положения штока клапана регулятора положения штока 3 и на вход блока сигнализации 2.
Перемещение штока 13 регулирующего клапана 14, осуществляемого мембранным приводом 6 под воздействием давления воздуха от электропневмопреобразователя 7, отслеживает преобразователь линейного перемещения в угловое 5. В преобразователе 5 поступательное перемещение штока посредством механических элементов преобразуется в угловое, которое в свою очередь через потенциометрический датчик преобразователя угла поворота 4 преобразуется в электрическое напряжение Ux, пропорциональное перемещению штока. Напряжение Ux поступает на входы текущего положения штока регулятора положения 3 и блока сигнализации 2.
Регулятор положения штока 3, исходя из сигнала заданного положения штока Ux w, определяемого блоком 12, и сигнала текущего положения штока Ux, поступающего от блока 4, формирует управляющее воздействие по ПИД-закону регулирования Up w, которое поступает на регулятор давления 10 в качестве задания.
Регулятор давления воздуха 10 по сигналу заданного значения давления Up w, формируемого регулятором положения 3, и сигналу текущего давления воздуха Up, поступающего через пневмоэлектропреобразователь 11 с выхода электропневмопреобразователя 7, формирует управляющее воздействие по ПИД-закону регулирования, которое в свою очередь поступает на сумматор 9 в виде токового сигнала Iр. Второй токовый сигнал Ix w, поступающий на первый вход сумматора 9, формируется в блоке 8 по сигналу о заданном положении штока из блока 12 по следующей формуле:

где Iвх - входной ток, мА,
Imin - минимальный входной ток, мА (4 мА),
Imax - максимальный входной ток, мА (20 мА).
В сумматоре 9 сигналы Iр и Ix w суммируются и поступают на вход электропневмопреобразователя 7, где пропорционально им формируется пневматический выходной сигнал Рвых (20-100 кПа), поступающий затем на мембранный привод клапана 6 и пневмоэлектропреобразователь 11. На электропневмопреобразователь 7 подается воздух давлением 140 кПа.
В блоке сигнализации 2 по сигналам о текущем положении штока Ux из блока 4 и заданном положении Ux w из блока 12 формируются сигналы внешней сигнализации A1, A2, А3. Сигнал A1 соответствует верхнему предельному положению штока (X=Хmax), сигнал А2 соответствует нижнему предельному положению штока (X=Xmin), сигнал А3 соответствует предельной ошибке рассогласования ΔXmax между заданием и текущим положением штока (IXзад-XI≥·ΔХmax).
Введение в устройство пневмоэлектропреобразователя 11, регулятора давления воздуха 10 и сумматора 9 позволяет организовать быстродействующий промежуточный контур регулирования положения штока 13 клапана при действии возмущений по пневматическим линиям (утечки, нестабильность питания и др.).
Применение блока расчета заданного положения штока 12 позволяет улучшить качество регулирования технологического параметра внешним регулятором за счет учета характеристик регулирующих клапанов.
Введение в устройство блока расчета тока 8 в зависимости от заданного положения штока и сумматора 9 позволяет организовать прямое управление перемещением штока 13 в зависимости от сигнала «токовой петли», минуя инерционный контур регулирования положением штока. Это позволяет резко повысить быстродействие устройства в целом и повысить качество регулирования положением штока, особенно в условиях часто меняющегося тока в «токовой петле».
В целом, введение новых блоков в известное устройство позволяет повысить быстродействие и улучшить качество регулирования положением штока клапана как в условиях помех, так и в условиях часто меняющегося тока в «токовой петле».
Изготовлена опытная партия позиционеров приводного механизма в количестве 10 шт. Проведены промышленные испытания позиционера, подтвердившие его надежность и высокое качество регулирования положения клапана в условиях промышленных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОНЕР ПРИВОДНОГО МЕХАНИЗМА | 2012 |
|
RU2489606C1 |
| ИСКРОВОЙ СИГНАЛИЗАТОР ВЗРЫВООПАСНОСТИ | 2001 |
|
RU2244958C2 |
| УНИВЕРСАЛЬНАЯ ЗЕРНО- И СЕМЯОЧИСТИТЕЛЬНАЯ ЛИНИЯ | 2007 |
|
RU2364449C1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| УНИВЕРСАЛЬНАЯ ЗЕРНО- И СЕМЯОЧИСТИТЕЛЬНАЯ ЛИНИЯ | 2010 |
|
RU2452588C1 |
| Устройство для автоматического управления процессом кристаллизации сахара в вакуум-аппарате периодического действия | 1981 |
|
SU1017737A1 |
| ВОЗДУШНО-РЕШЕТНЫЙ СЕПАРАТОР | 2008 |
|
RU2372153C1 |
| ВАЛКОВАЯ ПОДАЧА | 1997 |
|
RU2127648C1 |
| Устройство для ввода хроматографических проб | 1983 |
|
SU1135953A1 |
| СПОСОБ ПОСЛЕУБОРОЧНОЙ ОБРАБОТКИ СЕМЯН ЗЕРНОВЫХ КУЛЬТУР И ЛИНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352099C1 |
Позиционер предназначен для пневмоприводов мембранного или поворотного типа систем автоматического регулирования. Позиционер содержит блок питания, блок сигнализации, связанный с регулятором положения штока и через преобразователь угла поворота связанный с преобразователем линейного перемещения в угловое. Вход преобразователя и выход мембранного привода клапана предназначены для взаимодействия со штоком клапана, а вход мембранного привода клапана связан с выходом электропневмопреобразователя. Позиционер дополнительно содержит блок расчета тока, связанный с регулятором положения штока, сумматором, связанным с электропневмопреобразователем. Сумматор подключен также к регулятору давления, соединенному с регулятором положения штока и пневмоэлектропреобразователем, связанным с электропневмопреобразователем. Блок расчета заданного положения штока связан с регулятором положения штока и блоком расчета тока. Технический результат - улучшение качества управления положением клапана. 3 ил.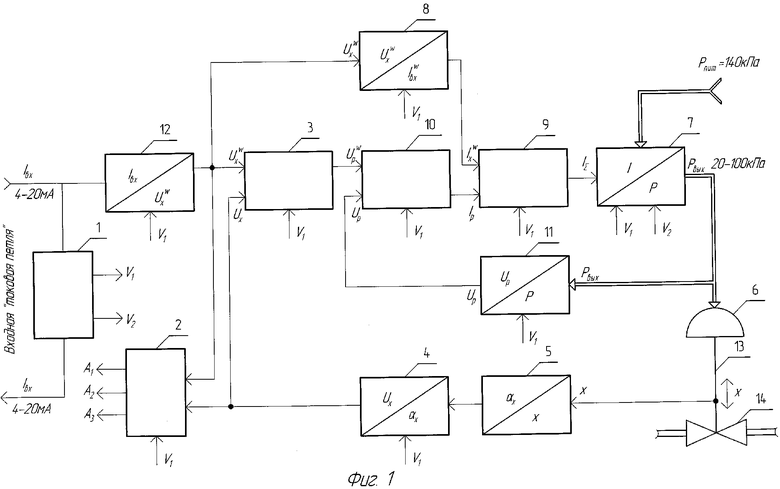
Позиционер приводного механизма, содержащий блок питания, блок сигнализации, выходы которого предназначены для подключения внешних элементов сигнализации, первым входом связанный со входом заданного положения штока клапана регулятора положения штока, а вторым входом - с его входом текущего положения штока клапана и через преобразователь угла поворота связан с преобразователем линейного перемещения в угловое, вход которого и выход мембранного привода клапана предназначены для взаимодействия со штоком клапана, а вход мембранного привода клапана связан с выходом электропневмопреобразователя, первый вход которого предназначен для подключения к пневматической линии, при этом первый выход блока питания связан с входами питания блока сигнализации, регулятора положения штока клапана, преобразователя угла поворота и электропневмопреобразователя, а второй выход блока питания связан со вторым входом питания электропневмопреобразователя, отличающийся тем, что он дополнительно содержит блок расчета тока, вход которого связан со входом заданного положения штока клапана регулятора положения штока, а выход - с первым входом сумматора, выходом связанного со вторым входом электропневмопреобразователя, второй вход сумматора подключен к выходу регулятора давления, первый вход которого связан с выходом регулятора положения штока, а второй его вход связан с выходом пневмоэлектропреобразователя, вход которого связан с выходом электропневмопреобразователя, при этом выход блока расчета заданного положения штока связан со входом заданного положения штока клапана регулятора положения штока и входом блока расчета тока, а его вход предназначен для подачи входного тока, при этом первый выход блока питания связан с входами питания блока расчета заданного положения штока, регулятора давления, пневмоэлектропреобразователя, сумматора и блока расчета тока.
| US 5431182 А, 11.07.1995 | |||
| US 6512960 В1, 28.01.2003 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ШАРОВЫХ КРАНОВ | 2004 |
|
RU2253762C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2126497C1 |

