(5) СИСТЕМА СВЯЗИ ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ С ПНЕВМАТИЧЕСКИМИ РЕГУЛЯТОРАМИ



| название | год | авторы | номер документа |
|---|---|---|---|
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Устройство для связи управляющего вычислительного комплекса с пневматическими регуляторами | 1983 |
|
SU1163330A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
| Устройство управления пневматическими регуляторами | 1980 |
|
SU881664A1 |
| Устройство для задания и дистанционного управления производственными процессами | 1973 |
|
SU477391A1 |
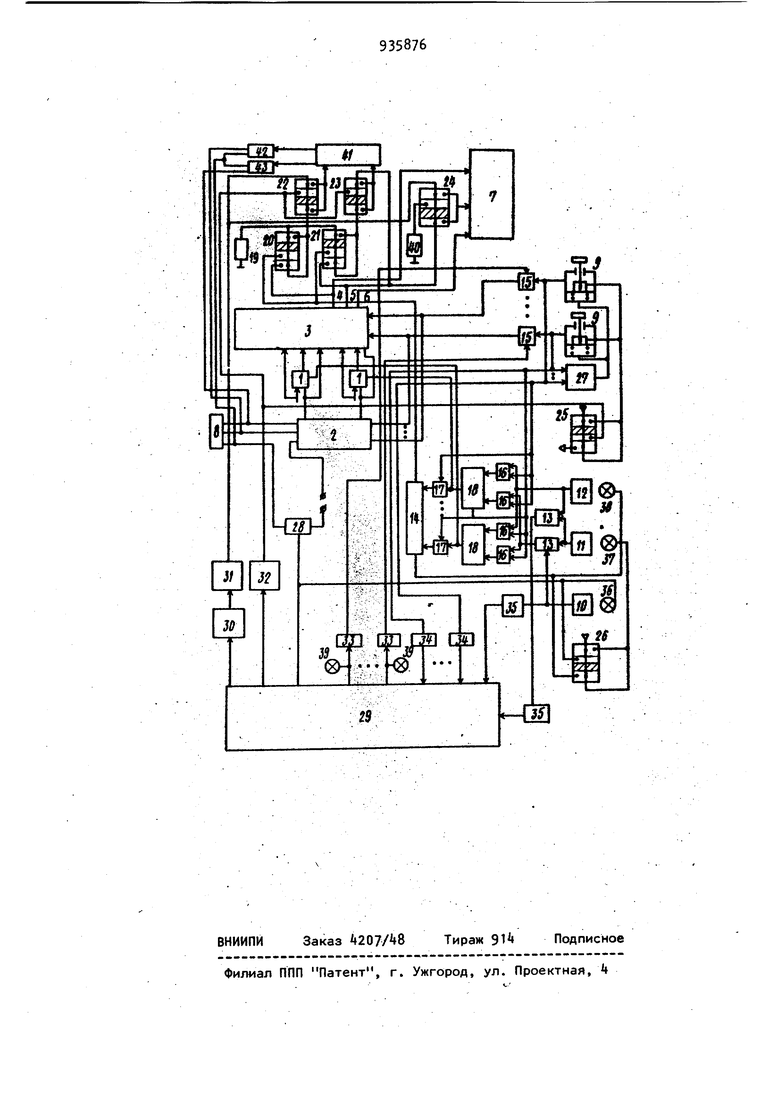
Изобретение относится к приборостроению, а именно к системам связи электронно-вычислительной машины с пневматическими регуляторами, работающими в автоматизированных системах централизованного контроля и управления непрерывными технологическими процессами, и может быть использовано в пневматических агрегатных комплексах технических средств. Известна система связи электронно-вычислительной машины (ЭВМ) с пнев матическими регуляторами, содержащая пневмоэлектро- и электропневмопреобразователи, пневмореле, трехпозиционмые переключатели режимов работы, задатчики автоматического и ручного управления и нормальнозамкнутые пневмоклапаны Г1. Недостатком известной системы является то, что она требует для своей реализации использования индивидуальных пневмоэлектро- и электропневмопреобразователей для каждого из пневматических регуляторов, входящих в состав системы. В результате резко возрастают затраты на реализацию системы связи и ее обслуживание в ходе промышленной эксплуатации, снижается надежность системы в целом. Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является система связи электронно-вычислитёльной машины с пневматическими регуляторами, содержащая блок групповых задатчиков номиналов (заданий), коммутатор, выходы которого через коллекторы параметра и давления на исполнительном механизме соединены со входами показывающего прибора, коллектор номинала, цифроаналоговый преобразователь, вход которого соединен с ЭВМ, а выход - с аналоговым электропневмопреобразовбтелем. Система включает также кнопки переключения режимов, вызова,сигнализаторы и узел сравнения для безударного перехода с режима на режим 2. Недостатком известной системы является то, что она обладает ограниченными возможностями в отношении повышения быстродействия. -Цель изобретения - повышение быстродействия. Указанная цель достигается тем, что в известной системе связи электронно-вычислительной машины (ЭВМ) с пневматическими регуляторами, содер жащей блок групповых задатчиков номиналов, подключённый к входным каналам коммутатора, подключенные к входным каналам коммутатора каналы параметров связанные с пневматическими регуляторами, выходы которых соединены с вход ными каналами коммутатора, выходы коммутатора связаны с коллектором номиналов и через коллекторы параметра и давления на исполнительном механизме соединены с -первыми и вторым входами показывающего прибора, последовательно включенные цифроаналоговый преобразователь, соединенный с инфор мационным выходом ЭВМ и аналоговый электропневмопреобразователь кнопки переключения режимов кнопки вызова, сигнализаторы режима работы и узел сравнения, выходы которого через диск ретные пневмоэлектропреобразователи соединены с одними управляющими входами блока групповых задатчиков номиналов, введены первая группа элементов ИЛИ, второй элемент ИЛИ, третья группа элементов ИЛИ, первая и вторая группа элементов И, триггеры, задатчик опорного сигнала, кнопка контроля номинала, блок сброса сигнала с кнопок вызова, пневмореле, электрореле, дополнительные дискретные пневмоэлектропреобразователи и электропневмопреобразователи, причем коллекторы параметра и номинала соединены одними с проточными камерами первого и второго пневмореле, управляющие камеру которых соединены с выходом второго элемента ИЛИ, другие проточные камеры данных пневмореле соединены с задатчиком опорного сигнала, а выходы - с одними проточными камерами третьего и четвертого пневмореле, другая проточная камера третьего пневмореле подключена к выходу аналогового электропневмопреобразователя, управляющие камеры данных пневмореле через первый дискретный электропневматический преобразователь подключены к одному из выходных каналов коррекция ЭВМ, а выходы третьего 93
Пы и через соответствующий дополнительный дискретный пневмоэлектропреобразователь с одним из входов ЭВМ,
выходных каналов ЭВМ кородин из
рекция соединен с управляющим входом || алектрореле, включенным между элементом управления и. блоком групповых задатчиков номиналов, первым сигнализатором режима работы и первой управляюИ четвертого Пневмореле связаны с входами узла сравнения, другая проточная камера-третьего пневмореле связана с коллектором номинала, кнопка контроля номинала связана с управляющей камерой пятого пневмореле, входы которого соединены с коллектором номинала и выходом аналогового электропневмопреобразователя, а выход с третьим входом показываю1цего прибора, выходы кнопок вызова соединены через первые входы третьей группы элементов ИЛИ с управляющими входами коммутатора и блокагрупповых задатчиков номиналов и (епосредственно со входами блока сброса сигнала с кнопок вызова, первыми входами элементов И первой группы и через соответствующие дополнительные дискретные пневмоэлектропреобразователи со входами ЭВМ, выход блока сброса сигнала с кнопок вызова связан с управляющими входами кнопок вызова, питающие входы которых соединены с выходом ojecToro пневмореле, управляющая камера данного пневмореле связана с выходом первого дискретного электропневмопреобразователя, вторые входы первой и второй пар элементов И из первой группы соединены с выходом первого элемента ИЛИ и.з первой группы и кнопкой переключения режима ручной, выходы элементов И первой группы через последовательно включенные триггеры и вторую группу элементов И соединены со входами второго элемента ИЛИ, выходы кнопок переключе-. НИИ режима автомат и ручное соединены с входами элементов ИЛИ первой группы, выход второго элемента ИЛИ первой группы соединен через соответствующий дополнительный дискретный пневмоэлектропреобразователь с одним из входов ЭВМ, кнопка переключения режима машина связана с вторым входом первого элемента ИЛИ первой груп55 щей камерой седьмого пневмореле, проточная камера которого связана с выКодом второго элемента ИЛИ, а выход данного пневмореле - со вторым сигнализатором режима работы, выход второ го элемента ИЛИ соединен с третьим сигнализатором режима работы, вторые входы элементов ИЛИ третьей группы соединены через соответствующие диск ратные электропневмопреобразователи с другими выходными каналами коррекция ЭВМ и соответствующими сигна лизаторами режима работы. На чертеже представлена принципиальная схема системы связи ЭВМ с пне матическими регуляторами. Система связи ЭВМ с пневматически регуляторами содержит пневматические регуляторы 1, блок 2 групповых задат миков номиналов заданий , выходы ко торых соединены через коммутатор 3 и коллектор Ц параметра, коллектор 5 номинала;и коллектор 6 давления на исполнительном механизме с входами показывающего прибора 7, тумблер 8 элемент управления блоком 2 групповы задатчиков, кнопки 9 вызова и кнопка ТО переключения режима машина, кнопка .11 переключения режима автомат и кнопка 12 переключения режима ручное, первая группа элементов ИЛИ 13, вторая группа эле ентов ИЛИ I и третья группа элементов ЦЛИ 15, первая группа элеменJOB И 16, вторая группа элементов И триггеры 18, задатчик 19 опорного сигнала, первое пневмореле 20, второе пневмореле 21, третье пневмореле 22, четвертое пневмореле 23, пятое пневмореле 2, шестое пневмореле 25 и седьмое пневмореле 2б, блок 27 сброса сигнала с кнопок вызова, электрореле 28, включенное между блоком 2 групповых задатчиков номиналов и тумблером В управления, ЭВМ 29, выходы которой через цифроаналоговый преобразователь 30 и аналогооый электропневмопреобразователь соединены с одним из проточных камер пневуореле 22 и через первый дискрет ный электропневмопреобразователь 32 . с управляющей камерой пневмореле 22, через другие дискретные электропневмопреобразователи 33 - с входами эле ментов ИЛИ третьей группы, через дополнительные дискретные пневмоэлектро преобразователи 3 с кнопками 9 вызова и через дополнительные дискрет ные пневмоэлектропреобразователи 35 с кнопкой 10 переключения режима ма шина и вторым входом первого элемента ИЛИ из первой группы 13, сигнализаторы 36, 37 и 38 режима работы . схем регулирования и сигнализаторы режима работы ЗЭ коррекция от машины, кнопку АО контроля номинала, узел AI сравнения, соединенный с диск ретными пневмоэлектропреобразователями Ц2 и 3Система связи ЭВМ с пневматическими регуляторами работает следующим образом. Для вызова того или иного параметра на показывающий прибор 7 оператор нажимает на соответствующую кнопку 9 вызова, при этом ее шток опускается и давление питания проходит через сопло на выход кнопки и далее через один из элементов ИЛИ 15 на коммутатор 3Одновременно выходной силнал нажатой оператором кнопки 9 вызова поступает, на блок 27 сброса сигнала с кнопок 9 вызова, выходной сигнал которого обеспечивает возвращение в исходное (ненажатое ) состояние кнопки 9 вызоыва, нажатой оператором в предыдущем моменте времени. Для того, чтобы контролируемый оператором контур регулирования находился в режиме ручного ( дистанционного) управления, оператор нажимает на кнопку 12 переключения режима ручное, выходной сигнал которой собирается по схеме И с выходным сигналом кнопки 9 вызова нажатой в настоящий момент ) на соответствующем первом элементе группы элементов И 16, выходной сигнал которого взводит соответствующий контролируемому контуру триггер 18, при этом на выходе триггера 18 формируется сигнал условной 1, который отключает соответствующий регулятор 1 и, собираясь по схеме И с выходным сигналом нажатой кнопки 9 вызова на втором элементе И из группы элементов И 17, Формирует на выходе последнего сигнал . условной 1, проходящий второй элемент ИЛИ 1 и включающий сигнализатор режима 38. После этого оператор, воздействуя на блок групповых задатчиков ручного управления (на чертеже не показан), осуществляет регулирование положения клапана исполнительного механизма. Так как при этом изменяется значение регулируемой переменной, то для того, чтобы перевод контура в режим автоматического управления происходил безударно, сигналы параметра из каналов параметра П и номинала из коллекторов Ц и 5 коммутируются через пневмо793l) 20, 21, 22 и пиевмореле 23 на входы узла сравнения 41. Если номинал окажется неравным параметру, то на одном из выходов узла сравнения 1 появляется пневматический сигнал условной 1, который, проходя через пневмоэлектропреобразователь 42 (параметр больше номинала) или +3 (параметр меньше номинала), обеспечивает замыкание цепи электропитания и вращение реверсивного электродвигателя блока 2 групповых задатчиков и штока задатчика номинала, контролируемого в настоящий момент контура (прижатие штока задатчика к маховику электродвигателя блока 2 групповых задатчиков номиналов (заданий) обеспечивается сигналом условной 1 от кнопки 9 вызова). Вращение штока задатчика номинала продолжается до того момента, пока сигналы параметра и номинала на входе регулятора 1 не сравняются между собой, так как при этом на выходе узла сравнения Ш отсутствует сигнал условной 1 и цепь питания блока 2 групповых задатчиков номиналов (заданий) размыкается. При необходимости перевода контура в режим автоматического управления оператор нажимает на кнопку 11 переключения режима автомат, выходной сигнал которой проходит первый элемент ИЛИ из группы 13 первый элемент И из группы 16 и сбрасывает соответствующий триггер 18, в результа те выход регулятора 1 подключается к исполнительному механизму (на чертеже не показан), пневмореле 20 и пневмореле 22 коммутируют на оба вхо да узла сравнения 41 выходной опорный сигнал задатчика 19 опорного сиг нала, что обеспечивает формирование на его.выходах сигналов условный О а инверсно соединенный сигнализатор и сигнализатор 38 переключаются таким образом, что включенным становит ся сигнализатор 37 (последний управляется выходным сигналом пневмореле 26). При необходимости перевода контура в супервизорный режим управления регулятором 1 от вычислительной маши ны 29 оператор нажимает на кнопку 10 переключения режима машина, предва рительно вызвав его на индикацию нажатием на соответствующую кнопку 9 вызова; выходной сигнал кнопки 9 вызова проходит через дополнительный дискретный пневмоэлек rponpeo6pr 3(H.v8тель 3 и поступает в вычислительную машину 29- При этом в последней, в ячейке памяти-(на чертеже не показана), соответствующей данному контуру, запоминается информация о переводе контура в супервизорный режим управления. Одновременно сигнал от кнопки 10 переключения машина через первый элемент ИЛИ из группы элементов 13 и первый элемент И из группы элементов 16 подается на сброс соответствующего триггера 18 и устанавливает на его выходе сигнал условного О, В тот момент, когда в вычислительной машине 2 формируется новое заданное значение для данного контура, происходит опрос ячейки памяти, задающей режим управления данным контуром, и в случае, если машинный режим задан, на выходном коммутаторе (на чертеже не показан) вычислительной машины 29 формируется код, соответствующий новому значению задания, а сигнал условной 1 появляется на соответствующем сигнализаторе 39 режима работы коррекция от машины, а также проходит через дискретныйэлектропневмопреобразователь 32 в управляющие камеры пневмореле 22 и пневмореле 23, мембранные блоки пневмореле опускаются вниз; сформированный в вычислительной машине 29 код преобразуется в цифро-аналоговом преобразователе 30 в аналоговый электрический сигнал стандартного диапазона, а затем в электропневмопре,образователе 31 в аналоговый пневматический сигнал стандартного диапазона; последний коммутируется вместе с сигналом .номинала, формируемым блоком 2 групповых задатчиков номиналов , на входы узла сравнения И; в случае, если сигналы окажутся неравными, на одном из выходов узла tl сравнения формируется пневматический сигнал условной 1 таким образом, Мто пневмоэлектропреобразователь «2 срабатывает, если задание от вычислительной машины 29 больше номинала, а пневмоэлектропреобразователь 3 . если задание от вычислительной машины 29 меньше номинала. При -этом замыкается цепь питания реверсивного электродвигателя, который начинает вращать шток соответствующего задатчика блока 2 групповых чадатчиков (номиналов) в ту или иную сторону до того момента, пока выходной гиг нал задатчика не станет ранним выходному сигналу вычислительной машины 29- Через интервал времени, достаточный для выравнивания сигналов, сигнал условной 1 снимается с выхода вычислительной машины 29 с канала коррекция и соответственно дискретного электропневмопреобразователя 32 и сиг нализатора 39, а контур продолжает работать в режиме автоматического управления, стабилизируя параметр на за данном вычислительной машиной 29 уров не; через определенный промежуток времени вычислительная машина 29 формирует новое задание и процедура управления положением штока задатчика блока 2 групповых задатчиков (номиналов) повторяется. При нажатии кнопки 10 переключения машина вычислительная машина 29 выдает сигнал с канала коррекция на сигнализатор Зб и электрореле 28; последнее разрывает цепь электропитания (каналы управления) блока 2 групповых задатчиков (номиналов); таким о разом, тумблер 8 управления в случае если оператор воздействует на него, пытаясь вручную изменить задание регулятору, не сработает. Одновременно выходной сигнал дискретного электропневмопреобразователя 32 поступает в управляющую камеру пневмореле 25. результате его мембранный блок подни мается вверх и давление пневмопитапри этом исключается возможность вызова другого контура.Для обеспечения ком мутации сигнала номинала от блока. 2 групповых задатчиков (номиналов) через коммутатор 3 к узлу- сравнения i в супервизорном режиме работы контура, вычислительная машина 29 вьщает по каналу коррекция через дискретный электропневмопреобразователь 33 и соответствующий элемент.ИЛИ группы элементов 15 управляющий сигнал на коммутатор 3Для того, чтобы оператор смог про контролировать в автоматическом режиме значение задания, форм1 руемого вычислительной машиной 29, в устройстве hpeдycмoтpeны кнопка 0 конт роля номинала и пневмореле 2. При нажатии на кнопку мембранный блок Ьнeв юpeлe 2 опускается вниз и пнев матимеский сигнал, пропорциональный значению задания, формируемому вычислительной машиной 29 поступает для контроля на показывающем приборе 7. В случае, если кнопка (} не нажата, на показывающий приОор / коммутируется выходной сигнал блока 2 групповых задатчиков (номиналов) (через коммутатор 3 и коллектор 5 номинала) . Предлагаемая система связи электронно-вычислительной машины с пневматическими регуляторами более проста, чем известная схема,так как вместо многоканального злектропневмопособразователя использован одноканальный пневмоэлектропреобразователь. Увеличивается и надежность работы системы из-за отсутствия возможности сбоя в канале для каждого пневматического регулятора. Важным преимуществом предлагаемой системы по сравнению с известной является увеличение ее быстродействия в несколько раз, так как с помощью предлагаемой системы можно формировать и выдавать пневматическим регуляторам любое оптимальное задание независимо от его значения в предшествующий выдаче момент времени (плавность перехода на новое задание обеспечивается плавностью вращения электродвигателя блока групповых задатчиков); при использовании же многоканального электропневматического преобразователя приходится изменять задание регулятору постепенно небольшими приращениями, что снижает быстродействие системы; в противном случае (при одноразовой выдаче полного сигнала задания в системе возникают сильные автоколебательные процессы. Формула изобретения Система связи электронно-вычислительной машины с пневматическими регуляторами, содержащая блок групповых задатмиков номиналов, подключенный к входным каналам коммутатора, подключенные к входным каналам коммутатора каналы параметров, связанные с пневматическими регуляторами, выходы которых соединены с входными каналами коммутатора, выходы коммутатора связаны с коллектором номиналов и через коллекторы параметра и давления на исполнительном механизме соединены с первым и вторым входами показывающего прибора, последовательно включенные цифроаналоговый Преобразователь, соединенный с ин,формационнь1м выходом ЭВМ, и аналоге вый электропневмопособразопптегь кнопки переключения режимов кнопки вызова, сигнализаторы режима работы и узел сравнения, выходы которого мерез дискретные пиевмоэлектропреобразователи соединены с одними управляющими входами блока групповых задат циков номиналов, элемент управления, отличающаяся тем, что, с целью повышения быстродействия, содержит первую группу элементов ИЛИ, элемент ИЛИ, вторую группу элементов ИЛИ, первую и вторую группы элементов И, триггеры, задатчик опорного сигнала, кнопку контроля номинала блок сброса сигнала с кнопок вызова, пневмореле, электрореле, дополнительные дискретные пневмоэлектропреобразо ватели и электропневмопреобразователи, причем коллекторы параметра и номинала соединены с одними проточными Камерами первого и второго пневмореhe, управляющие камеры которых соедийены с выходом элемента ИЛИ, другие Проточные камеры данных пневмореле соединены с задатчиком опорного сигна Jia, а выходы - с одними проточными ка мерами третьего и четвертого пневмоpef e, другая проточная камера третьего пневмореле подключена к выходу аналогового- электропневмопреобразователя, управляющие камеры третьего и четвертого пневмореле через первый дискретный электропневмопреобразователь подключены к одному из выхрдных kaHaooB Коррекция ЭВМ, а выходы третьего и четвертого пневмореле связаны с входами узла сравнения, другая проточная камера третьего пневмореле связана с коллектором номинала, кнопка контроля номинала связана с управляющей камерой пятого пневмо|3еле, входы которого соединены с коллектором номинала и выходом аналогового электропневмопреобразователя, а выход - с третьим входом показываюй(его прибора, выходы кнопок вызова .соединены через первые входы элементов ИЛИ второй группы с управляющими входами коммутатора и блока групповых задатчиков номиналов и непосредственно со входами блока сброса сигнала с кнопок вызова,, первыми входами элементов И первой группы и через соответствующие дополнительные дискретные пневмоэлектропреобразователи со входами ЭВМ, выход блока сброса сигнала С кнопок вызова связан с управляющими входами кнопок вызова, питающие входы которых соединены с выходом шестого пневмореле, управляющая камера шестого пиевмореле связана с выходом перрого дискретного электропневмопреоб(эазователп, вторые входы первой и второй пар элементов И первой группы соединены с выходом первого элемента ИЛИ первой группы и кнопкой переключения режима Ручной, выходы элементов И первой группы через последовательно включенные триггеры и вторую группу элементов И соединены со входами .элементна ИЛИ, выходы кнопок Переключения режимов Автомат и Ручной соединены с входами элементов ИЛИ-первой группы, выход второго элемента ИЛИ первой группы соединен через соответствующий дополнительный дискретный пневмоэлектропреобразователь с одним из входов ЭВМ, кнопка переключения режима Машина связана с вторым входом первого элемента ИЛИ первой группы и через соответствующий дополнительный дискретный пневмоэлектропреобразователь - с одним из входов ЭВМ, один из выходных каналов ЭВМ Коррекция соединен с управляющим входом электро|эеле, включенным между элементом управления и блоком групповых задатчиков номиналов, первым сигнализатором режима работы и первой управляющей камерой седьмого пневмореле, проточная камера которого связана с,выходом элемента ИЛИ, а выход седьмого пневмореле - с вторым .сигнализатором режима работы, выход элемента ИЛИ соединен с третьим сигнализатором режима работы, вторые входы элементов ИЛИ второй группы соединены через соответствующие дискретные электропневмопреобразователи с другими выходными каналами Коррекция ЭВМ и соответствующими сигнализаторами режима работы. Источники информации, принятые во внимание при экспертизе 1.Склярский Э.И. и др. Автоматизированная система централизованного контроля и управления. Нефть-.Н., Химия, 1977, с. 106-107. 2.Макарьев С.В. и др. Структура комплекса технических средств ЦНИИТЭНЕФТЕХИМ. 1979, с. , (прототип),
